基于Landsat 8 OLI遥感影像的浅海水深反演研究
2023-09-06黄东武吕立蕾
黄东武,吕立蕾
(北海航海保障中心,天津 300220)
浅海水深信息是船舶安全航行、海底地形构造和浅海资源开发利用重要的基础空间地理信息[1]。沿海港口航道图通过定期更新以实现对我国沿岸港口、航道等重要通航水域持续监测,确保通航安全。同时,沿海港口航道图对近海和海岸带规划与管理、航海和海洋环境科学研究以及近海工程建设(如电缆和管道铺设、疏浚、石油钻探等)具有重要意义。精确的水深信息作为沿海港口航道图最为核心的地理信息要素,当前主要的获取手段为船载声呐测量[2],但因其存在成本高、耗时久、困难地区(近岸、岛礁附近等浅水区)无法施测以及作业受天气等因素影响大等缺点[3-4],使得其应用仍有一定的局限性。基于卫星遥感影像的水深反演技术凭借其非接触类作业手段、大范围快速水深获取能力等优势逐渐得到发展。近年来,随着遥感技术的迅速发展,遥感影像的空间分辨率、时间分辨率和光谱分辨率均得到大幅度提高,水深反演技术的研究深度和广度也得到不断扩展,特别是在偏远海域或浅海区域已成为传统水深测量手段的有效补充[5]。如王纪坤等[6]将该技术应用于黄岩岛珊瑚礁区水深反演;张磊等[7]利用多波段遥感数据进行库区水深反演;孟然等[8]引入梯度提升决策树(Gradient Boosting Decision Tree,GBDT)算法构建了GBDT水深反演模型,有效提高了反演精度。
目前水深反演模型以半理论半经验模型应用最为广泛,本文选取渤海湾内部部分水域进行水深反演实验,通过遥感影像反射率和实测水深值之间的相关性建立了单波段模型和波段比值模型,并对验证区域进行水深反演及精度评定,为浅水深反演技术在港口航道图周期测量中的应用提供了技术支撑。
1 基本原理
根据布格尔定理可知,可见光在水体中传播时,会因水体的吸收和反射随水深变化呈指数衰减[9],入射辐射通量表示如下
Tz=T0e-αZ
(1)
式中:Tz是水深为Z时的入射辐射通量;T0为水体表面辐射通量;α为可见光衰减系数。
根据可见光遥感基本原理可知,传感器接收到的光信号主要由大气层辐射、水体表面反射、水体后向散射和水底反射信号构成。如果将前三者作为一个整体,一种方式是利用POLCYNFC等[10]的研究用深水区辐射近似代替,考虑到水底反射光在水中的衰减特性,由此可得到简单衰减模型如下所示
RE=αRbe-fKZ+RW
(2)
式中:RE为传感器接收的反射值;f为几何光程长度,一般情况下取值为2;α为综合因子,与太阳辐射在水面和大气中传播及光线在水面折射等多种影响有关;K为水体衰减系数;RW为水体反射值;Rb为水体反射值。式(2)是遥感水深反演的模型基础,由此可进一步推导出单波段模型、波段比值模型。
(1)单波段模型。
针对底质类型单一,水深值与单波段影像反射率线性关系较好的情况,可只考虑光在水体中呈指数衰减,对式(2)进行对数运算,可得
Z=ln(αRb)/fK-ln(RE-RW)/fK
(3)
假设海底底质反射率及水体的衰减系数为常数,则可令
a0=ln(αRb)/fK;a1=-1/fK;X=RE-RW
即得到单波段模型
Z=a0+a1ln(X)
(4)
式中:X为某波段的反射率。
(2)波段比值模型[11]。

(5)
对式(5)求对数,得到
(6)
令式(6)中
即推导出波段比值模型为
(7)
式中:X为某波段的反射率。此模型建立了2个波段对数变换后比值与水深的关系,在反演大范围的水深时,更加稳定且探测范围更深,是应用最为成熟的反演模型。
2 实验及分析
2.1 研究区介绍
实验区位于渤海湾水域,其经纬度跨度为38°27′~38°36′N,118°12′~118°00′E,如图1框选所示。该区域于2021年进行港口航道图测量,图幅内具有高精度均匀分布实测水深点,区域内以自然水域为主,水深分布为12~18 m,底质较为稳定,因海域远离大陆,受人类直接影响小,光可穿透性强,具备遥感反演水深的地理空间条件。
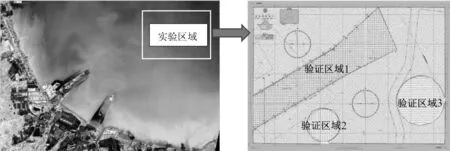
图1 实验区域示意图Fig.1 Schematic diagram of experimental area
因此通过图幅内部分实测数据建立反演模型,均匀分布选取3处作为验证区域进行实验研究,其中区域1水深分布为10~17 m,区域2水深分布为12~13 m,区域3水深分布为15~17 m。
2.2 实验数据
(1)影像数据。使用的影像数据为Landsat 8 OLI 30 m分辨率多光谱数据,Landsat 8是美国陆地卫星计划(Landsat)的第八颗卫星,于2013年发射升空,重访周期16 d,成像宽幅185 km×185 km,因其具有重访周期短、成像质量高、数据处理及共享机制完备等诸多特点,影像数据应用较为广泛[9]。OLI(Operational Land Imager)陆地成像仪共包含8个波段,其中海岸波段(0.433~0.453 μm)、蓝波段(0.450~0.515 μm)和绿波段(0.525~0.600 μm)因波长较短,水体穿透能力强,为海洋水体研究领域常用波段[12]。
实验获取一景覆盖实验区域的Landsat 8 OLI影像,轨道号为122/33,成像时间为2021年1月19日02:47:52,与实测水深数据时相相近。经目视判读,影像信息丰富,实验区无云层覆盖,符合水深反演实验影像基本要求。
(2)实测数据。采用天津海事测绘中心2021年7月至9月渤海湾区域内某沿海港口航道图测量数据作为实测数据,测量方式为单波束测深,水深分布为10~18 m,测深精度满足GB 12327—1998《海道测量规范》[13]要求。
2.3 影像预处理
通常遥感影像是以像元亮度值(Digital Number,DN)来记录地物的灰度值,像元亮度值是一个无量纲的整数,其值大小与地物反射率、传感器辐射分辨率以及大气透过率和散射率相关[14]。因此需要经过辐射校正将其转换为遥感反射率,即反射能量与入射能量的比值。
首先利用ENVI(the Environment for Visualizing Images)软件中辐射定标模块实现图像的像元亮度值转换为绝对的辐射亮度,而后利用FLAASH大气校正模型以消除由大气影响所造成的辐射误差,获得地物真实的表面反射率。基于目前应用较为广泛的模型MODTRAN 4+辐射传输模型的FLAASH大气校正模型,该模型对海洋大气校正具有良好的效果,适用波长范围包括可见光至近红外及短波红外[15]。大气校正前后光谱曲线对比如图2和图3所示。

图2 大气校正前光谱曲线Fig.2 Spectral curves before atmospheric correction
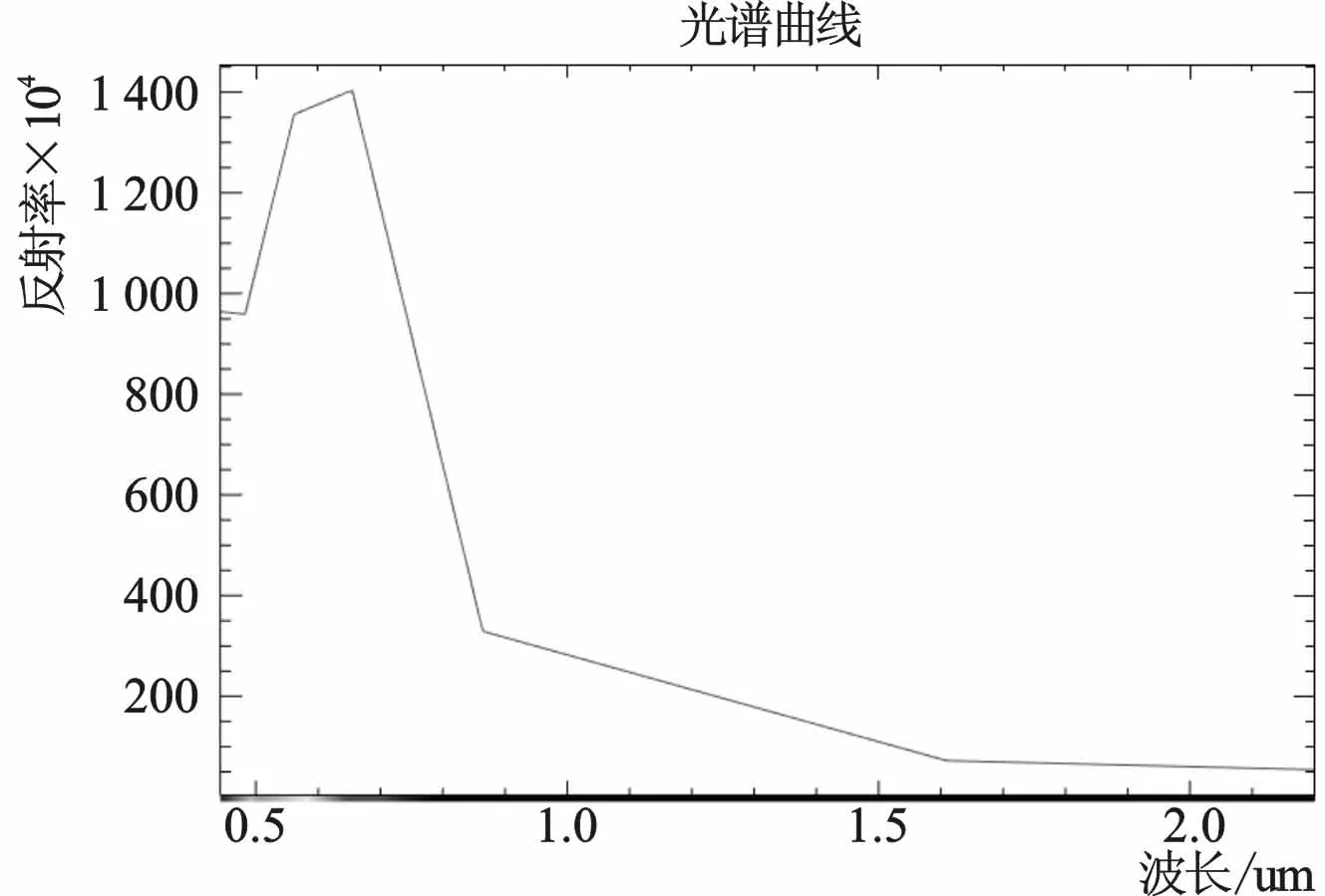
图3 大气校正后光谱曲线Fig.3 Spectral curves after atmospheric correction
2.4 模型建立
水深模型的建立与影像预处理、实测水深点分辨率及精度密切相关。研究区内具备高精度均匀分布实测水深点,空间分辨率150 m×250 m。模型建立所需实测水深数据根据空间分布及分辨率可选用断面选点和均匀选点两种方式,如图4和图5所示,其中断面选点采用实测水深数据中的检查线数据,均匀选点按不同分辨率(比例尺1:25 000,图上距离10 mm、20 mm、50 mm、100 mm)进行抽稀。决定系数(R2)是反映水深模型相关拟合程度的重要指标,决定系数越大,反演水深点在水深真值回归直线附近越密集。研究发现,断面选点方式因水深点数量较少,模型自身拟合决定系数较高,而均匀选点方式不同分辨率下模型拟合趋势总体一致,但拟合公式系数差别较大。两种选点方式决定系数随实测水深空间分辨率降低而减小。抽稀分辨率设置为10 mm时水深点数量显著增加,但决定系数提高不明显。抽稀分辨率设置为20 mm时,两种选点方式决定系数差别不大。
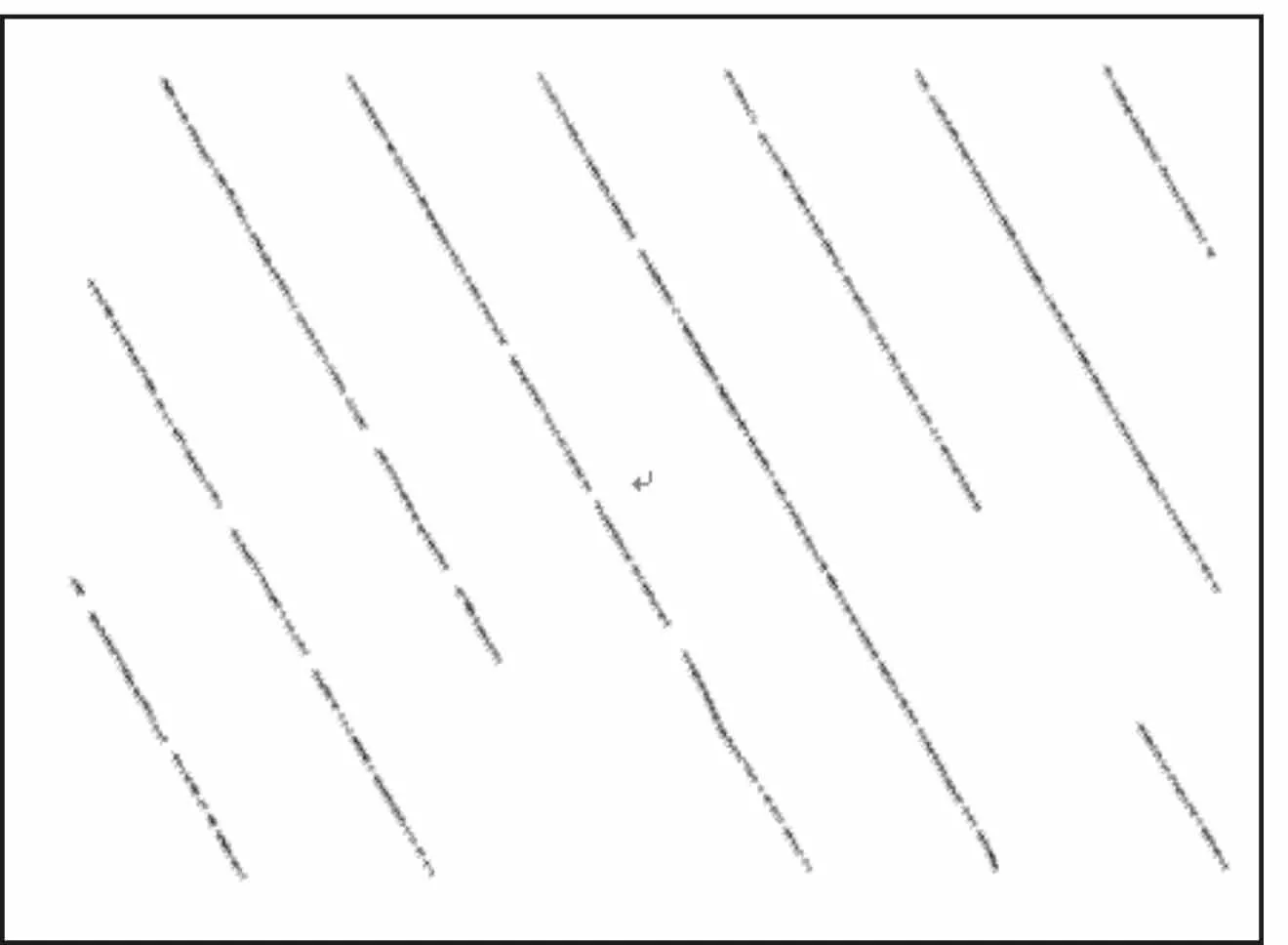
图4 断面选点方案Fig.4 Section selection point scheme
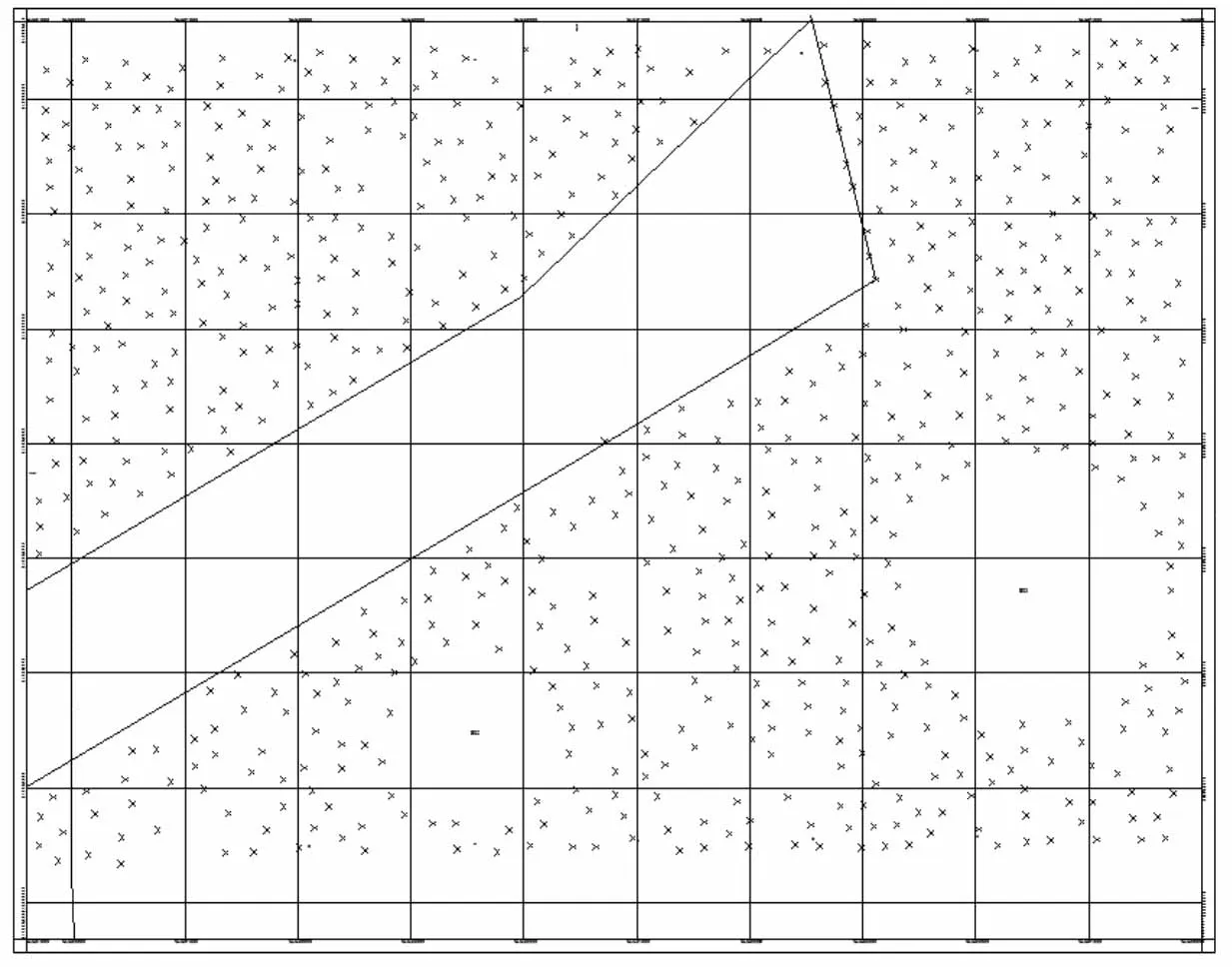
图5 均匀选点方案Fig.5 Uniform point selection scheme
因此,鉴于实验区域实测水深数据达到全区覆盖,且均匀分布,本研究采用均匀选点方式,按照图上20 mm间距抽稀后,共计选取1 837个水深点参与模型建立,将水深点展至预处理后影像检查是否有水深点落在船舶及其尾流等反射率失真处,剔除粗差后提取各水深点处反射率并根据单波段模型和波段比值模型计算公式,逐一建立波段(波段组合)与水深实测值之间的拟合公式及其对应的决定系数,如图6~图11、表1所示。值得注意的是,红外、近红外及短波红外因波长较长,水体穿透力较低,无法得到较为有效的拟合效果,在此不再进一步分析。
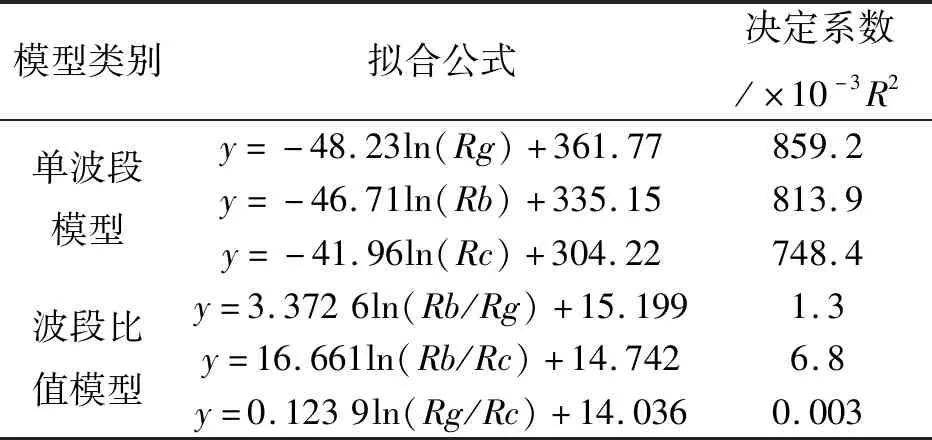
表1 水深反演模型Tab.1 Water depth derived model

图8 海岸波段反演模型Fig.8 Coastal band derived model
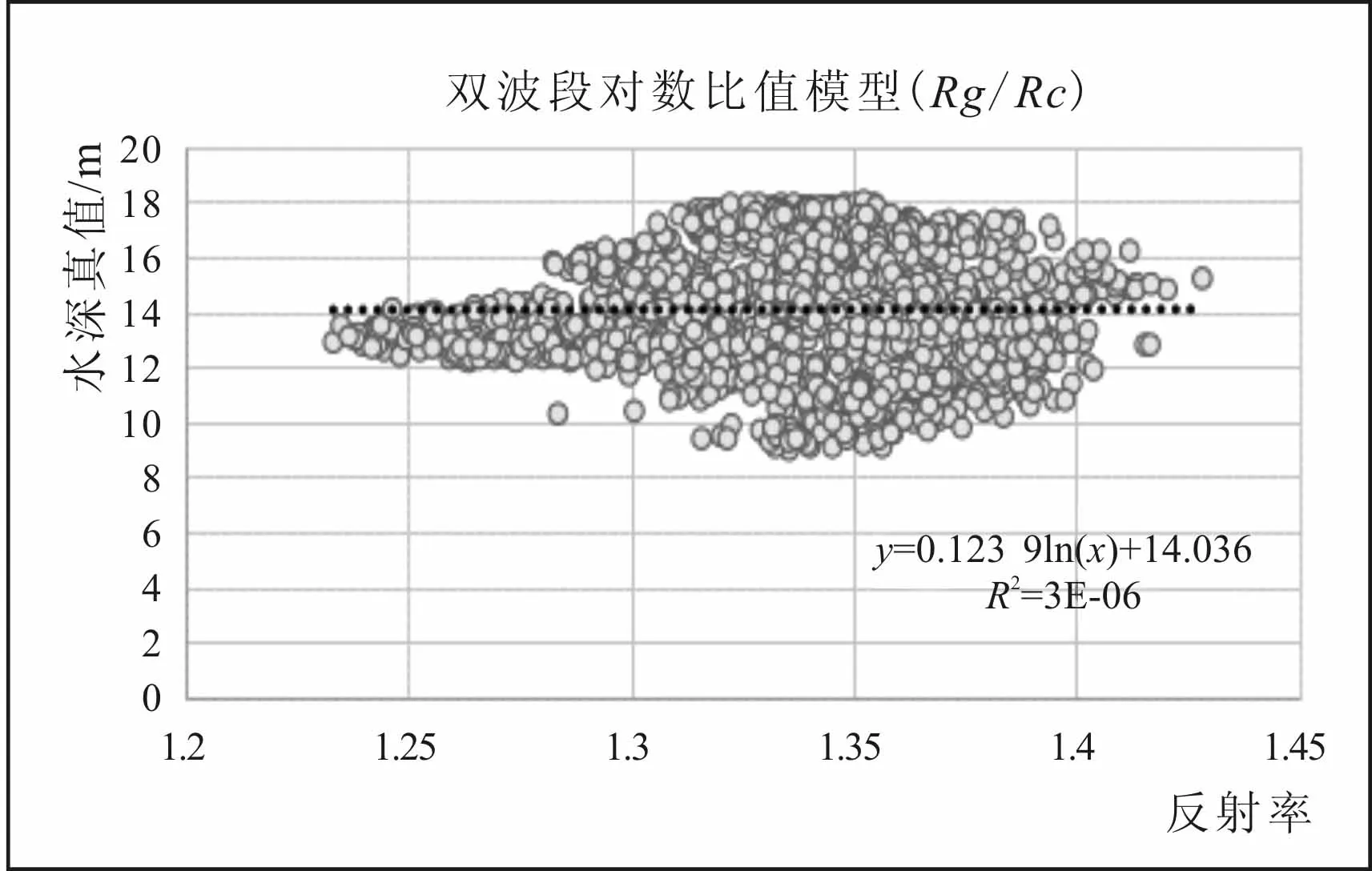
图9 双波段(绿/海岸)对数比值反演模型Fig.9 Band ratio (green/coastal) derived model
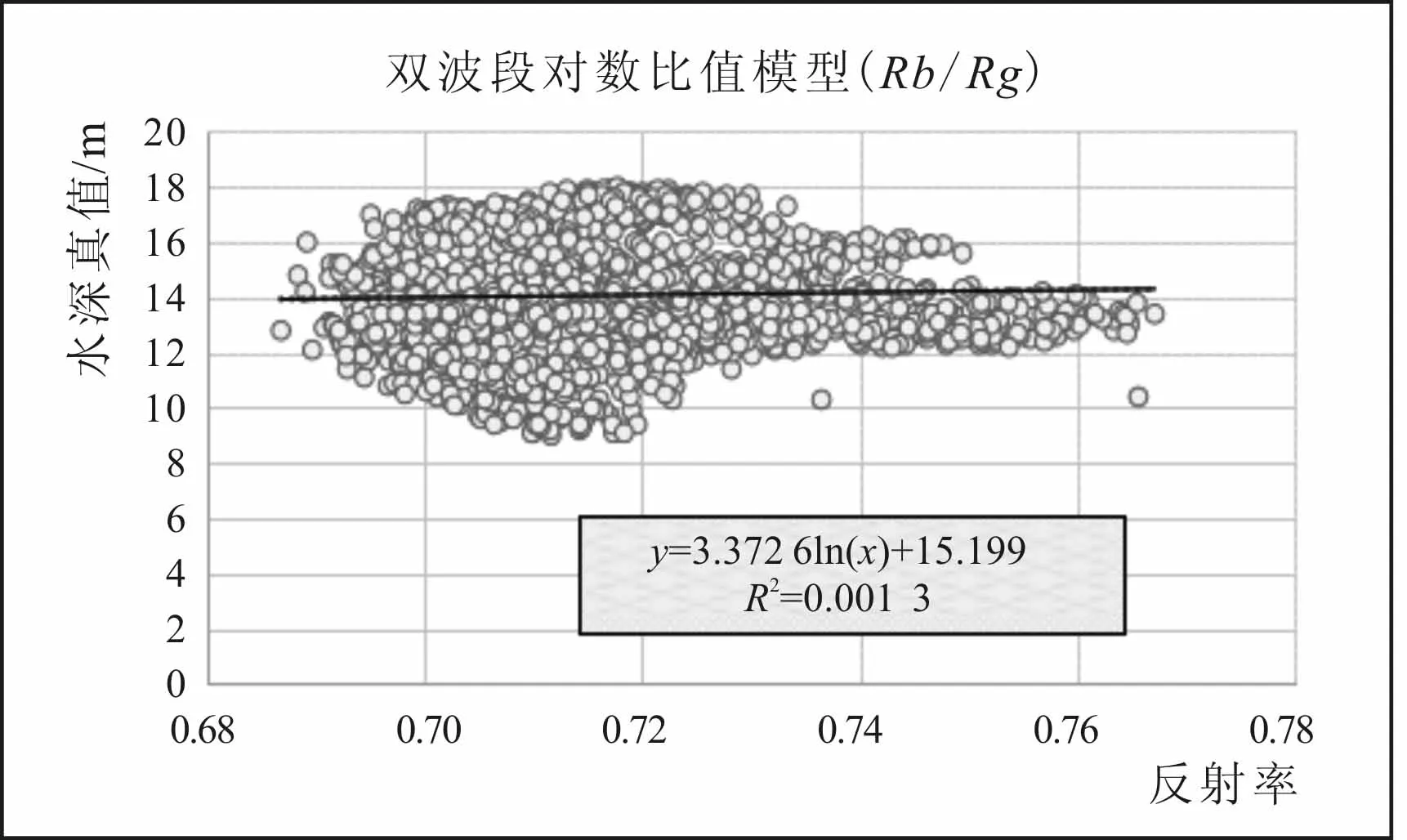
图10 双波段(蓝/绿)对数比值反演模型Fig.10 Band ratio (blue/green) derived model

图11 双波段(蓝/海岸)对数比值反演模型Fig.11 Band ratio (blue/coastal) derived model
2.5 模型分析
为进一步反映出各模型与实测水深之间的线性相关程度,计算其Pearson相关系数如图12所示,Pearson相关系数值越接近1或者-1表明两变量线性关系越强。从图6~图11中可看出,不同波段(波段组合)和水深实测值所建立的水深反演模型中,相关性差异较大。单波段反演模型整体优于双波段对数比值模型,反映出海底底质较为稳定单一,查阅沿海港口航道图可知该图幅底质类型为“泥”。同时,单波段反演模型相关系数均优于-0.86,表明各波段反射率与其位置处的水深值呈现明显的线性相关性,且随着反射率的增加水深呈减小趋势,随波长的增加,反射率分布的中心值变大。
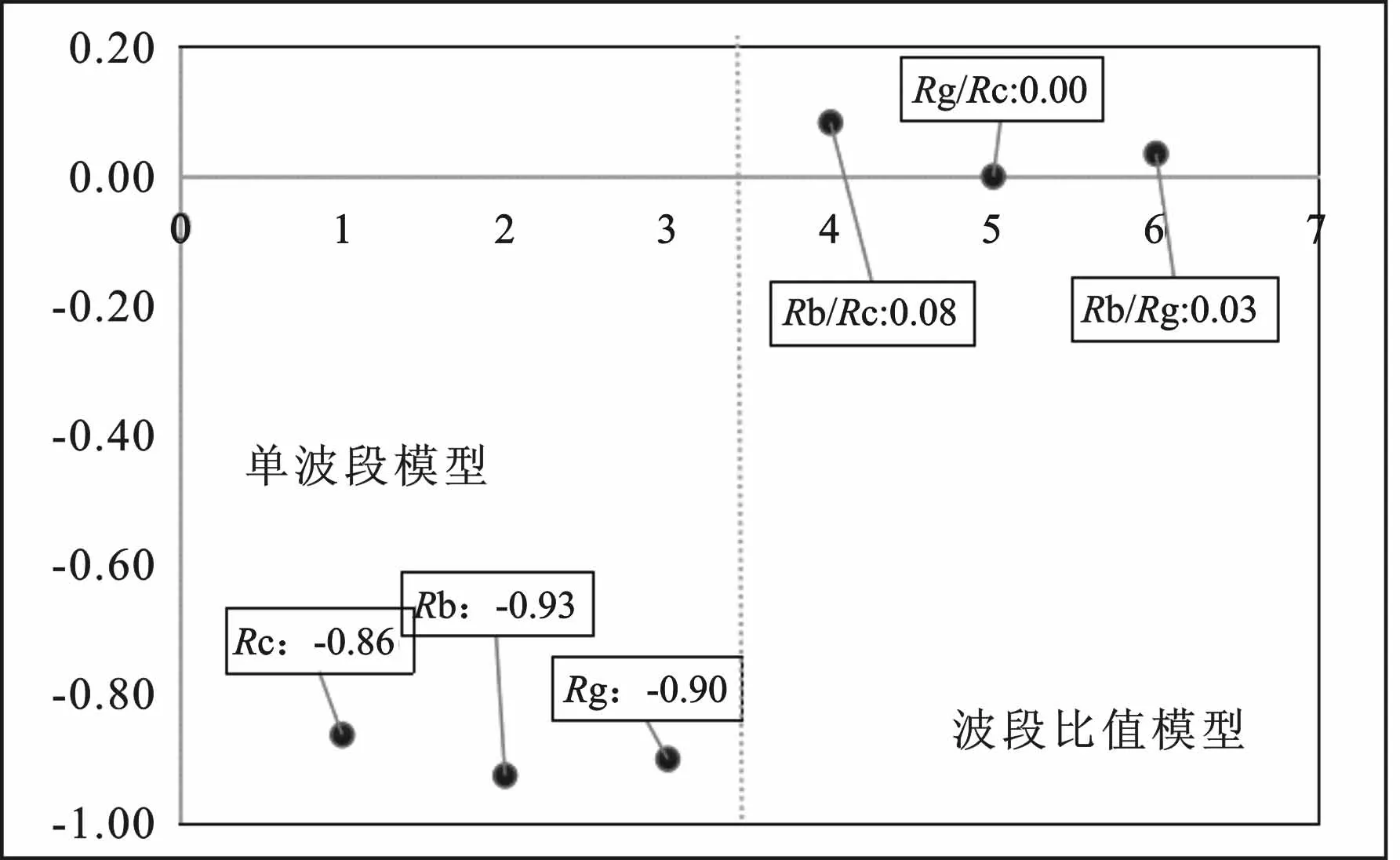
图12 各模型与实测水深间的相关系数Fig.12 Pearson correlation coefficient between models and bathymetric data
因此,根据以上评价指标,判断出适用性最强的模型为单波段反演模型,而其中又以绿波段为最优,Pearson相关系数达到-0.93。
因此,选用绿波段建立的单波段模型对实验区进行水深反演,选取实测点位中3处区域实测水深作为验证数据,结果表明,验证区域水域反演水深与水深真值散点图(图13)具有明显的线性关系。
2.6 精度评定
为体现精度评定的科学合理性,分别对3个验证区域反演水深与实测水深差值进行了占比统计,按照《海道测量规范》水深≤20 m,水深主检比对需满足≤0.5 m,则验证区域1最佳可达67.10%(图14)。
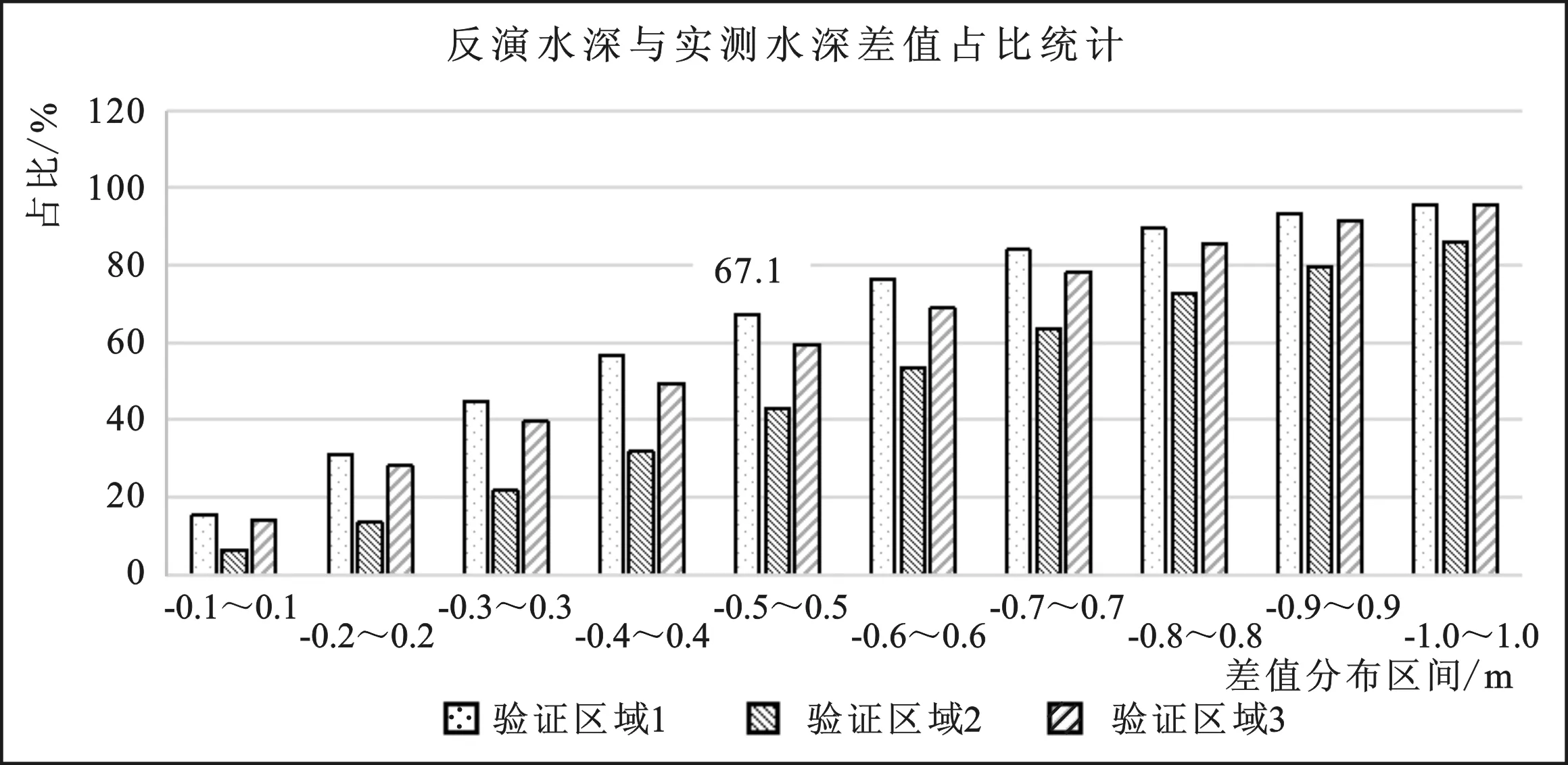
图14 反演水深与实测水深差值占比统计Fig.14 Difference ratio statistics of derived water depth and measured water depth
另外,通过计算3个统计量对反演精度进行指标评价:均方根误差(RMSE)、平均绝对误差 (MAE)和平均相对误差(MRE)[16],各个指标的计算式如下所示
(8)
(9)
(10)

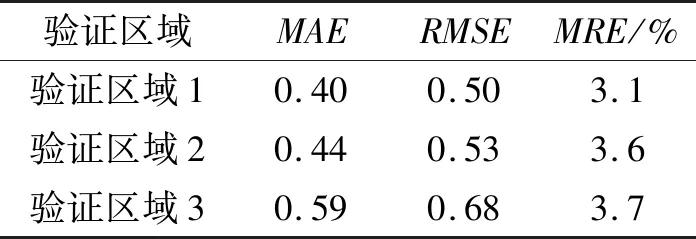
表2 不同区域水深反演误差评价指标值Tab.2 Evaluation index values of water depth inversion errors in different regions
由表2可知,3处验证区域各项评价指标值均良好,其中以验证区域1水深反演效果最优,平均绝对误差(MAE)达0.40 m,均方根误差(RMSE)达0.50 m,平均相对误差(MRE)达3.1%,分析原因:(1)训练样本数据质量高,参与模型建立的实测水深点精度高且分布均匀,模型拟合精度高;(2)实验区地理位置距离岸边较远,受海水波浪及人为扰动较小,海底底质较为稳定单一,水质均匀,是单波段反演模型最佳实验区域;(3)影像数据质量高,无云层覆盖,且与实测水深数据获取时相近,海底地形时空变化小。验证区域3指标最低,通过目视判读影像可知,该区域船只往来较为密集,一定程度上增大了反射率粗差率,实验过程中对相关验证点粗差进行了剔除,但船舶尾流等仍会对反演精度产生一定影响。
3 结论
本文基于Landsat 8 OLI影像数据及实测水深值,建立了不同波段(波段组合)情况下的单波段和波段比值模型,并选取相关性最高的绿波段单波段模型对3处验证区域水深进行反演及精度分析,取得较好效果,为遥感影像反演浅海区自然水深提供了重要的技术支撑。通过研究分析:(1)针对底质类型较为单一的研究区域,单波段模型反演精度优势明显,整体上优于波段比值模型,而又以绿波段为最佳;(2)高精度均匀分布的实测水深数据是提高反演模型的重要影响因素,采用均匀分布实测水深作为训练样本,模型精度得到大幅度提高;(3)影像质量对反演精度影响较大,如近岸的浪花、船舶尾流等,易造成反射率失真,进而影响反演水深精度;(4)自然水域水深反演精度平均绝对误差(MAE)为0.40 m,平均相对误差(MRE)为3.1%,均方根误差(RMSE)为0.50 m,对水深反演技术在沿海港口航道图数据获取中的应用提供有力的技术支撑。
值得注意的是,本实验中影像预处理及反演模型以经验模型为主,部分技术指标实验值尚有待提高。下一步,将通过提高影像分辨率、优化反演模型以及分析影响反演精度因素等为底质单一区域精度的提高做好进一步研究,以获得更为全面、精度更高的浅海水深反演结果;同时,针对底质类型复杂区域、水下碍航物探测等方面将展开进一步研究,以不断提升水深反演技术的应用预期、拓展水深数据的获取手段、促进海洋测绘技术的应用发展。
