无人机与无人船在船闸立体巡检中的协同应用
2023-09-06朱鹏瑞刘红彪齐方利张路刚谭林怀聂智超
朱鹏瑞,韩 阳*,刘红彪,齐方利,张路刚,谭林怀,聂智超
(1.交通运输部天津水运工程科学研究所 水工构造物检测、诊断与加固技术交通行业重点实验室,天津 300456;2.中国石油化工股份有限公司胜利油田分公司海洋石油船舶中心,龙口 265700)
随着我国交通运输发展和加快建设交通强国的推动实施,水运作为交通运输的组成部分,其基础设施安全与可靠的重要性愈发明显,但水运基础设施健康监测与安全保障方面仍存在结构安全性与耐久性问题突出、运行状态动态监管能力弱、信息化服务水平低等问题[1-2]。因此,《交通强国建设纲要》明确提出:“持续加大基础设施安全防护投入,提升关键基础设施安全防护能力。强化交通基础设施养护,加强基础设施运行监测检测,提高养护专业化、信息化水平,增强设施的耐久性和可靠性”。
水工建筑物检测目前以常规检测为主,巡检方式效率较低且结果粗放,巡检过程中存在一定的安全隐患和盲区。随着科技发展,近年来各种先进的设备与技术如无人机、水下机器人、多波束测深系统、声呐系统等逐步应用于水运结构检测,大大提高了检测的效率与精度[3-7]。胡健波等[8]首次尝试将无人机应用于防波堤巡检,形成“室外航拍,室内检测”的新巡检工作模式,提升了检测水平。LIU等[9]利用无人机采集高分辨率图像和多光谱数据作为判断水坝结构健康状况的依据,扩展了在水坝结构健康监测中的应用。无人船多波束系统测量与无人机机载激光雷达测量的原理基本一致,通常称为“水下激光雷达”。李庆松[10]探讨了无人机搭载激光雷达和无人船搭载多波束系统进行有效结合的技术方法,促进了水陆三维数据无缝衔接技术的发展,国内已有一些工程利用无人机机载激光雷达与无人船多波束系统联合进行河道测量,取得了较好的效果。
1 工程背景
姚江船闸建成于1999年,设计通航能力300 t级,是船舶通过京杭甬大运河全线的必经之地,按照300 t级标准设计,航道等级为内河五级航道,共计长1 750 m。船闸及航道设计水深为2.5 m。闸室尺寸为160 m×12 m×2.5 m。上游引航道长430 m,下游引航道长300 m,设计年过闸货运量588万t。为充分了解船闸结构设施的技术状态,需要进行一次全面的检测,从而为船闸水工结构设施的规范管理、维护提供技术支撑。
2 船闸闸室质量检测
2.1 水上构件观感质量检查
根据JTS 257—2008《水运工程质量检验标准》,船闸的观感质量检查(包括裂缝检测)主要是对船闸的外露构件或部位表面进行全面的近距离检查,包括船闸的表观病害、分闸墩、闸墙、地面、导航、靠船构筑物及附属设施等。观感质量检查是以人工目测观察并进行仪器观测,对混凝土构件表面存在缺陷(包括蜂窝麻面、裂缝、露筋、混凝土剥离剥落等)、破损及老化、腐蚀等现象的构件重点进行描述并统计,用卷尺测量缺陷尺寸,用裂缝宽度观测仪测量裂缝宽度,记录缺陷位置,如裂缝宽度、长度、走向及腐蚀面积等。在需要时可作为长期跟踪观测点,以观测缺陷部位的发展变化。除常规照片外,还需对每个构件部位处的缺陷进行拍照存档。
经检查,由于姚江船闸已使用超过20 a,且使用较为频繁,混凝土结构难免会产生混凝土碳化、钢筋锈蚀等劣化现象。在长期使用过程中,过往船只难免会与闸室壁发生碰撞、摩擦,导致船闸闸壁混凝土结构出现较多破损,破损型式主要为混凝土普遍麻面露石、混凝土裂缝(部分已修复)、混凝土露筋锈蚀及混凝土破碎脱落,其闸室现状见图1。

图1 姚江船闸闸室现状Fig.1 Present situation of Yaojiang lock chamber
2.2 水下构件观感质量检查
对船闸闸室、引航道及墩台等水下部分构件及基础设施进行水下探摸检查,确定是否存在破损、变形或者冲刷、淘空等情况,重点检查船闸伸缩缝及结构连接处的情况,对存在的缺陷部位采取丈量、拍摄等方法直观记录水下缺陷情况,对发现的可疑部位需做进一步核查。
根据水下机器人检查结果(图2),闸室墙体整体情况基本正常,大部分表面为冲刷麻面,但未发现大面积的破损、剥落、露筋等缺陷。墙体与止水钢板结合部、墙体与护坦结合部正常、伸缩缝正常,未发现明显破损、掏空等缺陷。河床局部区域轻度淤积,根据水下机器人滑动痕迹,推断淤积深度小于0.1 m。

2-a 闸墙麻面 2-b 墙体与护坦结合部正常 2-c 河床轻度淤积图2 船闸水下构件现状Fig.2 Current situation of underwater components of ship lock
3 船闸立体巡检技术
3.1 无人机机载激光雷达和无人船多波束系统协同作业
无人机机载高分辨率相机从不同角度获取具有一定重叠的影像数据,通过多视影像密集匹配算法恢复各影像在空间的位置姿态,实现二维影像数据到三维空间的映射,即实现高清三维倾斜摄影技术。机载LiDAR系统将激光雷达对地物进行长距离、大面积扫描,可直接获取水工建筑物的空间信息,能够为点云建模提供高效、准确的三维数据。无人船系统将GPS定位、自动避障、实时通讯、多波束测深等技术有效地结合起来,能在各种复杂的环境中稳定测量建筑物水下部分与水下地形等信息。如图3所示,将无人机技术与无人船技术协同应用起来,无人机技术在对人员难以到达或大面积的水工建筑物水上部分可实现全天候高效率的三维实景建模,无人船技术能够实现水工建筑物水下隐蔽部分与地形从大尺度到细尺度的全方位、多层次的覆盖,建立水工建筑物的三维立体模型,形成一套水工建筑物立体智能巡检技术。对于该船闸检测,仅采用水下机器人的视频检查很难对闸墙水下部分进行精确地量化,因此拟利用无人机搭载激光雷达和无人船搭载多波束系统协同作业开展立体巡检,并提取高精度断面数据,通过与设计数据比较即可分析闸室断面变化情况。

图3 立体巡检示意Fig.3 Stereoscopic inspection instructions
作为空间三维数据的展示,点云数据具有曲面模型所不具备的特征展示等优势,将无人机航测点云、多波束点云等海量数据集成转化在一个坐标系统中,建立船闸的三维点云模型,提供多角度、全方位的展示。
水上与水下点云数据融合方法主要包括自动拼接与手动拼接两种,自动拼接方法为架设同一基站,基站同时开启静态记录和动态差分模式,静态数据采集可供无人机机载激光雷达和无人船多波束系统 GNSS 定位同时使用,动态 RTK也同步作为无人船 GNSS的定位使用。无人机和无人船进行半自动化或全自动化作业,两套系统共用同一基站,实现点云的自动拼接[1]。但由于光照、扫描角度、环境等不可控的原因,软件的自动拼接并不一定都能成功,因此常常采用手动拼接模式,在软件中人工手动识别特征作为控制条件实现拼接操作,手动拼接分为特征点拼接、靶球拼接、标靶纸拼接和平面拼接等,本次采用点云特征点拼接。点云特征点应选择交角良好的细小线状地物的交点、明显的物拐角点等,同时应是高程变化较小的地方,易于准确定位和量测。立体巡检获取的点云数据是面测量方式,可对船闸的断面变化进行整体分析,同时定期立体巡检可观测结构体的连续变化。
根据现场踏勘情况,采用大疆M600Pro无人机搭载AA450激光雷达测量系统进行航拍。其航拍飞行速度4 m/s,飞行高度80 m,点云密度大于90 pts/m2,平面精度为1 cm,高程精度为2 cm,测距范围为0.3~119 m。无人船为华微6号无人船,其标准搭载Norbit多波束测深系统,测深范围为0.15~300 m,测深精度为±1 cm+0.1%h(h为水深),集成搭载iLidar三维激光扫描仪以完成水上水下一体化三维点云数据采集。
3.2 船闸三维精细模型构建
船闸三维复合模型主要由水上无人机激光雷达扫测点云和水下多波束水深测量点云两方面的数据融合去噪而成,三维复合模型能够实现对船闸结构测量的全方位覆盖。通过专业软件QTReader,可以准确得到船闸各构件的具体坐标和水下地形地貌等数据,有利于后期进行周期性的观测与分析。融合后的三维las点云模型如图4所示,进行渲染后效果如图5所示。
舆论监督是公民行使监督权的一种重要形式。在转型期的中国,各种社会矛盾突出,加之互联网的推动,社会舆论如沉默多年的火山突然找到了出口,呈井喷式样态迸发。而其道德至上、联合表达和易引起轰动效应的特征又容易对被控诉对象形成强大的舆论压力,迫使其主动让步。因此舆论监督的有效实现是保护儿童健康权等弱势群体合法权利的重要手段。
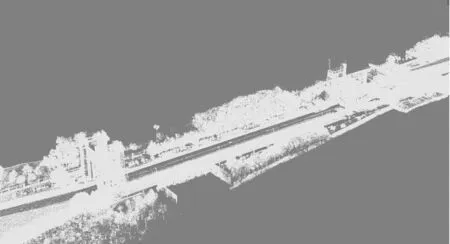
图4 水上与水下数据融合后的三维las点云模型Fig.4 3D las point cloud model based on water and underwater data fusion

图5 船闸三维点云渲染图Fig.5 Ship lock 3D point cloud rendering map
3.3 现状断面与设计断面对比
根据点云的高程属性,与原设计断面对比,胸墙顶面高程沉降为0.13~0.26 m,护坦沉降为0.19~0.27 m。为了校验无人机内置GPS的误差,利用全站仪和电子水准仪对该船闸进行测量,经过数据对比,水平位移测量误差在10 mm以内,垂直位移测量误差在5 mm以内,测量误差满足精度要求。
为了更加直观地观察断面的变化,提取闸室断面,主要步骤如下:
(1)点云精简。由于三维点云模型数据量巨大,必须进行一定的抽稀处理,简化后的数据既保留了三维模型的有效信息,可以大大降低其数量,从而实现对数据的高效处理[11]。在QTReader软件选中“Merge duplicated points”,输入“Tolerance”值(>0),指定容差范围内的点将被合并为一个点,本次“Tolerance”值选择为0.01 m;(2)点云分割。目的是分段或者分结构提取点云模型,突出分析的重点,进行单独处理,可根据实际需要决定是否进行点云分割。通过裁剪框命令,框选需要删除的点云,仅保留目标区域的点云。本次主要保留了闸室的点云复合模型,并转换为XYZ格式;(3)提取断面轮廓线。将点云复合模型XYZ格式导入Hypack Max软件,利用“Tin Model”生成断面轮廓线,此次断面轮廓线的间距为0.05 m。
以胸墙拐角为重合控制点,将断面现状与原设计断面进行复合对比,比较各个断面中胸墙高程、闸墙垂直度、墙体与护坦结合部、护坦高程等变化情况。以上闸首某一断面为例,比较现状断面与原设计断面,可见二者断面吻合度较高,闸墙断面垂直度基本一致,墙体与护坦结合部略高于原设计,护坦高程低于原设计0.18~0.25 m ,如图6所示。
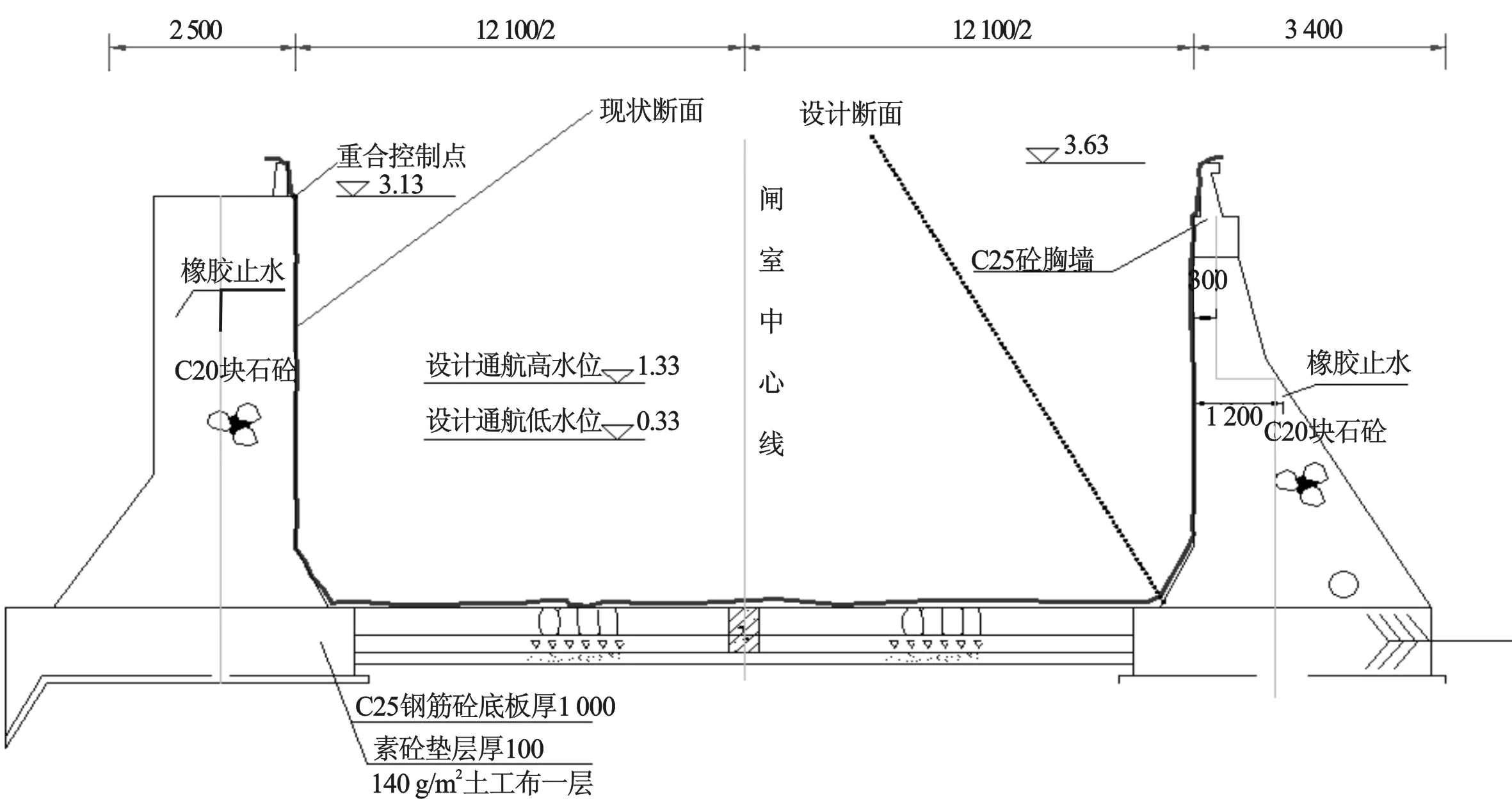
图6 现状断面与原设计断面复合对比(高度:m,平面:mm)Fig.6 Composite comparison between current section and original design section
4 现有状态下的闸首稳定性分析
4.1 几何模型建立
由于闸首结构发生了一定程度的改变,为了精确评估现状的稳定性,需要将实测断面导入有限元软件进行精确分析。在CAD图形中,断面轮廓线周围建立尺寸边界和材料边界,并进行分组编号(如边墩、地基土、墙后回填土等)。为降低边界效应对分析区域的影响,底板宽度B=24.2 m,地基水平工作范围L取3B,即为72.6 m,地基深度H取1.25B,即为30.3 m。线条与线条只能相交于两端,不能有线条端点在其他线条中间。并将整个图形移动到坐标原点。将完成后的CAD图线保存成sat格式文件,导入有限元软件ABAQUS,然后划分网格[12-14]。地基的不同土层按密度、粘聚力、内摩擦角等参数按已知地质勘探成果表取值。
边墩与底板都是大体积混凝土,在建模过程中,真实模拟边墩、底板、回填土和地基土之间的相互作用,为减少锐化网格的出现,建模过程中消除了部分尖角,使计算更加接近实际。模型网格采用线性六面体Hex单元,单元形状控制采用非协调模式单元(Incompatible models),即为C3D8IH单元,采用这种线性单元的计算时间可以得到与二次单元相当的计算精度[15]。本模型中共有40 494个单元、34 596个节点。闸首结构计算网格如图7所示。
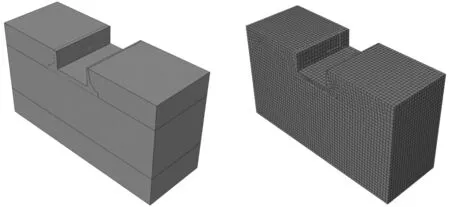
图7 模型构建与网格划分Fig.7 Model construction and grid division
如果建立的模型过于复杂,导入ABAQUS 时可能出现“支离破碎”的现象,此种情况可以通过第三方软件Hypermesh分出高质量的网格并导出为inp格式,然后直接导入ABAQUS[16]。
4.2 加载及效应组合
低水位最不利的水位组合为闸室内低水位而墙后可能出现最高水位(排水管水位)。作用在船闸的荷载包括自重、设备重、静水压力、扬压力、土压力、活荷载。这种计算情况的特点是指向闸室方向的水平力较大,渗透水头也较大。检修期闸室内水完全抽干,墙后水位在排水管水位,此时指向闸室方向的水平力最大。因此本次计算主要考虑检修工况与低水位工况。
根据JTJ307—2001《船闸水工设计规范》,有限元计算中包括以下荷载:(1)自重G。根据材料容重由有限元程序ABAQUS自动计算,自重为464.0 kN。(2)回填土压力。根据回填土材料容重由有限元程序ABAQUS自动计算,墙后土体水平方向土压力见表1,土体竖直向土压力强度计算见表2所示;(3)水压力。作用于建筑物表面的静水压力,应根据不同的水位组合情况进行计算;(4)水重。闸首底板上水的重力,通过计算将其换算成平面上的水压力加载在底板上表面;(5)扬压力。包括渗透压力和浮托力;土基上的渗透压力计算,基础地面高水侧取全水头H,低水头一侧取零,其间根据渗透轮廓按直线或折线相连,检修和正常运用工况时需考虑水压力和扬压力的作用,根据不同工况闸门前后水位不同,需对闸门上的单元施加不同的水压力。闸首底板上扬压力包括浮托力和渗透力,随着上下游水位的变化而变化,在ABAQUS中使用梯度荷载完成扬压力和水压力的加载;(6)闸门推力。闸门上的水压力通过闸门作用在边墩上,并最终通过边墩作用在整个结构物上。
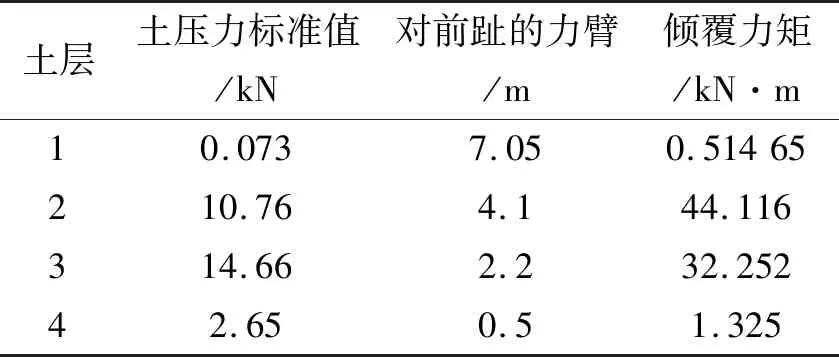
表1 水平土压力计算结果Tab.1 Calculation results of horizontal earth pressure
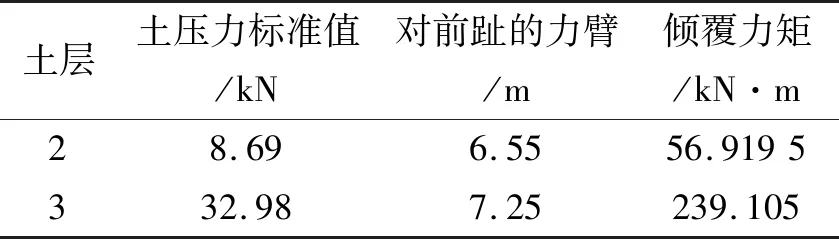
表2 竖向土压力计算结果Tab.2 Calculation results of vertical earth pressure
4.3 结果分析
(1)检修工况。检修期闸首最大主应力变化云图如图8所示。检修工况下,闸首内部没有水压力作用,且闸门上下游均无水,墙后填土达到设计标高,墙后水压力高度为排水管高度,闸首结构受力主要为结构自重及回填土压力。闸首结构受力大部分为压应力,由于左右闸墙的结构设计有所差异,左侧墙背竖直,而右侧墙背稍微倾斜,回填土对左侧边墩的受力明显更大;与左侧相同,右侧闸墙与后踵的连接段仍出现一定的应力集中效应,应力最大值为1.039 MPa。但集中程度不高,影响范围不大。调用ABAQUS数据,分别验算抗浮稳定性、抗滑稳定性与抗倾稳定性。
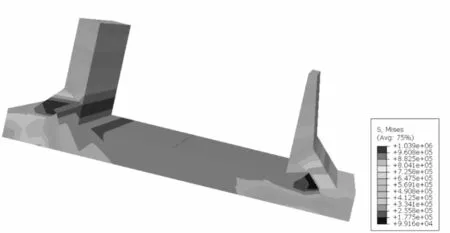
图8 检修工况下模型整体Mises应力云图(单位:Pa)Fig.8 The overall Mises stress nephogram of the model under maintenance conditions
式中:V为向下的垂直力之和;U为扬压力总和。
抗滑稳定性安全系数:kc=(f×ΣV)÷ΣH=(0.45×486.49)÷183.34=1.44>1.2,大于规范要求。
式中:f为分项系数;ΣV为竖向合力;ΣH为水平合力。
式中:f为分项系数;Mr为稳定弯矩;Mo为倾覆弯矩。
经过验算,闸首的抗浮稳定性、抗滑稳定性与抗倾稳定性安全系数均大于规范要求,因此检修工况下闸首处于稳定状态。
(2)低水位工况。低水位期闸首最大主应力变化云图如图9所示,闸首低水位工况下,闸首内部受到水压力作用,墙内受到侧向的水压力作用,闸底板存在竖向水压力,墙后填土达到设计标高,闸首结构受力主要为结构自重及回填土压力。与检修工况类似,闸首结构受力大部分为压应力,由于左右闸墙的结构设计有所差异,左侧墙背竖直,而右侧墙背稍微倾斜,回填土对左侧边墩的受力明显更大;右侧闸墙与后踵的连接段仍出现一定的应力集中效应,应力最大值为1.273 MPa。但集中程度不高,影响范围不大。调用ABAQUS数据,分别验算抗浮稳定性、抗滑稳定性与抗倾稳定性。抗浮稳定性安全系数为2.22,抗滑稳定性安全系数为1.36,抗倾稳定性安全系数为2.02,均大于规范要求,因此低水位工况下闸首处于稳定状态。

图9 低水位工况下模型整体Mises应力云图(单位:Pa)Fig.9 The overall Mises stress nephogram of the model under low water level conditions
5 结论
(1) 船闸无人机与无人船立体巡检能够最大程度的还原船闸现状,通过与设计断面的复合比对,能够详细掌握胸墙高程、闸墙垂直度、墙体与护坦结合部、护坦高程等变化情况,提高船闸的检测水平;(2) 立体巡检建立的闸室三维点云复合模型导入有限元软件计算相较于常规测量建立的模型稳定性计算更加真实可靠,大大提高了船闸评估水平;(3) 立体巡检获取的点云数据是面测量方式,可对闸室的断面变化进行精细分析。如何将航拍点云、多波束点云、声呐侧扫数据与光学成像等数据融合并集成于一个统一的智能巡检系统中,提供三维实景、多角度、全方位的展示,同时观测结构体的连续变化,将是今后的发展趋势。
