体相微马达双气泡聚并驱动的界面演化机制*
2023-09-06王丽娜陈力盛敏佳王雷磊崔海航郑旭黄明华
王丽娜 陈力† 盛敏佳 王雷磊 崔海航 郑旭‡ 黄明华
1) (西安建筑科技大学建筑设备科学与工程学院,西安 710055)
2) (中国科学院力学研究所,非线性力学国家重点实验室,北京 100190)
微纳米马达是建立微流体环境与宏观操控的桥梁,气泡微马达的驱动速度高,这一优势在实际应用中不可替代.管式气泡马达适用于复杂场景但能量转化率低,气泡驱动的Janus 微球马达效率高但仅适用于气液界面附近.鉴于此,本文提出通过双气泡聚并方式驱动Janus 微球马达的新体系,调和了高能量转化率与界面受限的矛盾.在实验中,借助高速摄像记录了双气泡聚并驱动微马达的~100 µs 级过程,气泡聚并紧邻微球发生,通过释放的能量驱动微球显著运动,其融合过程是独特的可动曲壁受限下的气液界面演化问题.进一步结合伪势格子Boltzmann 数值方法探究了气泡聚并驱动的流体动力学机制.研究结果揭示了不同时段气泡聚并的细节,给出了气泡颗粒尺寸比等因素对微球位移、初始动能转换率的影响,确认了双气泡聚并释放表面能的高效驱动机制.
1 引言
微马达因其体积微小,更易执行精细化的操作,在微机器人操控[1]、靶向药物运输[2]和生物传感[3]等领域具有广泛应用前景.微马达进行自驱动的形式多样[4,5],如化学方式驱动、增加外部声场、光场[6]、电场、磁场驱动,以及两者相结合的混合方式等.由于化学驱动方式的实验形式简洁,驱动效率相对较高,本文采用Janus 微球生成气泡的化学驱动方法.Janus 微马达可以通过非对称的表面催化反应将周围环境溶液中的化学能转化为机械能,驱动自身运动.相比于其他利用物理场梯度的驱动方式(热泳[7]、扩散泳[8]等),气泡驱动具有更强的驱动力,可以实现更高的微马达速度.尽管化学方式自驱动微马达的能量都来自溶质分解所释放的化学能,并最终转化为热能耗散掉,但不同驱动机制的能量转化形式和中间路径决定了微马达的能量转化率.理论上,当研究问题的尺度从宏观尺度下降至微纳尺度,体积力的影响会大幅下降,而表面力及线力会居于主导,这一尺度效应在微马达的设计问题中仍适用,意味着为获得高的能量转化率,微马达应尽量利用储存在界面中的能量.尽管同为气泡驱动微马达,但现有研究中却存在着两类性质截然不同的气泡驱动模式: 一是利用气泡与气液界面瞬间融合、界面完全消失所释放出的能量;二是利用完整的气泡反弹推动微马达,下面分别进行说明.
Janus 微球一般采用电子束蒸发镀膜制备,可以大批量获得.将Janus 微球置于低浓度 H2O2溶液中,当微球粒径大于气核生成临界粒径(约20 µm)时,借助Pt 表面的催化反应会析出过饱和氧气泡,发生微气泡推进[9].王雷磊等[1]通过实验揭示了如何利用Janus 微球实现气泡融合驱动微马达.这个过程发生在近气液界面处,随着气泡上浮或由于气液界面的薄膜蒸发,这个气泡会与气液界面融合,释放出界面能量,推动微球运动.Wang 等[10-12]也观察到了类似的气泡推进方式.经计算,这种驱动方式的能量转化率(η=Eo/Et,其中Eo为输出机械能,Et为总机械能)约为 10-7量级[13].有趣的是,在自然界中也观察到了类似的利用两相间界面能的力学机制.例如,苔藓类植物[14]利用囊腔中的高压气体、蕨类植物[15]利用“空化弹弓”发射孢子,它们的能量转化率则要高得多,约为 10-2量级.
另一类气泡驱动微马达为经典的管式微马达,它采用气泡反弹的驱动方式[16].微管结构可通过应变诱导纳米薄膜的自卷曲、基于模板的电沉积或双光子激光光刻制备[17],工艺相对复杂,制备的中空微管结构两端通常是几何不对称的[18].不同于Janus 微球生成的气泡位于球体外部,管式微马达Pt 催化层在微管内壁,气泡形成于管内,随着气泡不断地生成,后续气泡会排挤前面的气泡从微管的一端释放到溶液中[19].这里,管式微马达对内部气泡的保护作用要远大于Janus 微球对外部气泡的作用,意味着管式马达的工作模式可以不受外部环境的限制,适用于复杂的溶液场合.实验还观察到,在推动管式微马达后,气泡整体仍完整地存在于体相溶液中,形成长长的气泡尾链.而我们知道气泡大部分的能量贮存在界面中,因此管式微马达并未充分利用这部分界面能,这就限制了管式微马达能量转化率,Wang 等[20]计算了管式微马达的能量转换率约为 10-10量级.
可见,一方面现有人工微马达的能量转化率远不如自然界中的微生物,仍有很大的提升空间;另一方面,不同形式微马达的优缺点也非常明显.Janus 微球马达加工简单,可以更好地利用气泡界面消失所释放的能量,能量转化率较高,但气泡融合需在临近气液界面处才能触发;管式微马达气泡生成于微管内部,适用场景不局限于气液自由面,体相中甚至固液界面附近也能有效驱动,但其制备复杂,主要利用了气泡反推的能量,能量转化率偏低.
综上所述,是否可以设计一种新的驱动模式,能够兼顾上述两种微马达的优势,使其在气液界面、体相、固液界面处均能高效驱动? 鉴于此,基于Janus 微球体系提出了新颖的双气泡聚并驱动方式,既释放了部分气泡界面能量,保证了较高的能量转化率,又不需要气液界面触发的气泡融合条件,并保有了简洁的微球结构.另外,双气泡聚并驱动的方式还减小了气泡周期性生长、融合给流场带来的扰动,驱动过程更加稳定,定向性更好.这一新的驱动方式为微马达在复杂场景的应用提供了可能.本文借助高速摄像捕获了双气泡聚并驱动微马达的过程,通过观测两个气泡聚并前后的界面演化细节,结合伪势格子Boltzmann 方法数值模拟,阐明了双气泡聚并驱动微球的流体动力学机制.
2 双气泡聚并驱动微马达实验
2.1 实验设置
实验中,气泡生成是通过Janus 颗粒(直径在30—100 µm 之间)一侧的Pt 催化剂分解溶液中的而产生的.溶解氧过饱和后析出产生氧气泡,如图1(a)所示.借助倒置显微镜及高速摄像(Phantom V2512)记录实验过程.先滴加 H2O2反应溶液在载玻片上形成液膜,再蘸取Janus 颗粒悬浮于液膜间.考虑到气泡在纯水中维持的时间极短难以拍摄记录,但甘油黏稠且不与 H2O2水溶液反应.本实验在 H2O2水溶液的基础上添加了甘油配制出了不同浓度的反应试剂,增大溶液黏度,延长聚并发生过程.实验中主要通过控制 H2O2的浓度(10%—13%,VH2O2/VH2O)控制双气泡的生成.两个气泡依托成核点不断生长,界面相互接近,接触之后便会发生气泡聚并,此过程中颗粒被推开.气泡不断地生成、聚并、脱离颗粒,实现了对颗粒的驱动.

图1 (a)实验装置示意图;(b)气泡聚并形状演化的方向定位Fig.1.(a) Schematic diagram of the experimental setup;(b) orientation of the evolution of bubble aggregation and shape.
为了后续更好地对气泡聚并的演化过程进行描述,对双气泡的几何坐标进行定义,如图1(b)所示.在初始时刻,两气泡接触点的位置为O点,长轴方向规定为Z方向,两气泡颈部生长的方向规定为r方向,生长长度的一半为颈部半径rneck.
首先给出基本的气泡聚并过程的实验观察,如图2 所示.两个直径分别为88.0 µm 和87.6 µm 的气泡在甘油 H2O2水溶液(30%,V甘油/VH2O2水溶液)中发生聚并.这里的气泡通过Janus 微球产生,与微球脱离后,稳定存在于溶液中,与溶液中另一个气泡相遇后,被记录下来.此实验给出了基础的无临近颗粒影响的双气泡聚并过程.图2(a)为气泡聚并的初始时刻,从这个时刻开始,rneck开始出现.图2(b)中气泡聚并颈部均会受到黏性力、惯性力以及表面张力的共同作用,且两侧所受力相等,出现Z方向上严格对称的演化过程.当气泡颈部半径与气泡半径的比值为1 时,可认为颈部生长过程完成.故图2(c)中气泡聚并颈部的生长在10 µs 已基本完成.图2(c)和图2(d)为气泡回缩为球形的振荡过程.

图2 气泡聚集与界面演化的时间序列 (a) 0;(b) 4.34 µs;(c) 10.5 µs;(d) 43.39 µsFig.2.Time series of bubble aggregation and interface evolution: (a) 0;(b) 4.34 µs;(c) 10.5 µs;(d) 43.39 µs.
对气泡聚并前后的表面能变化进行分析.表面能根据两气泡半径Rb1,Rb2以及所处溶液的表面张力系数γ计算得到:,Rb表示气泡半径,其中表面张力系数的测定采用受限液滴表面张力仪.初始两气泡表面积之和为 4 .84×10-8m2,聚并完成后单气泡表面积变为 4 .14×10-8m2;双气泡聚并后表面积减小,表面能降低.气泡表面能Eσ的释放量为聚并前的14.6%.对气泡聚并前后不同尺寸气泡的表面能释放量进行统计,如图3 所示,表面能释放量随气泡半径呈二次函数关系.这里数据离散的可能原因在于理论推导中按照水的表面张力系数进行计算,而实验中溶液的初始配比及持续的化学反应使其浓度发生变化,造成实际表面张力系数会存在一定偏差.

图3 气泡聚并后表面能释放量随气泡半径变化图Fig.3.Variation of surface energy release with bubble radius after bubble aggregation.
实验Ⅰ考虑气泡聚并过程与临近颗粒的相互作用情况.图4(a)—(c)分别为半径24 µm 和25 µm的气泡在 H2O2水溶液中的聚并演化过程.在0—26 µs 气泡已经完成了颈部的生长;在图4(d)和图4(e)过程中颗粒在气泡的界面振荡中被弹开,出现了明显位移,同时气泡也被弹开;在图4(f)中聚并后的气泡仍存在溶液中,对体相溶液的扰动较小.经计算,图4 实验中气泡表面能的释放量约为8.1×10-11J,其中一部分用于推动颗粒,转化为颗粒动能,能量转化率大约在 10-9量级.

图4 Rb1=24 µm,Rb2=25 µm,Rp=27 µm 时,实验拍摄的气泡聚并驱动颗粒运动的时间序列(黄色虚线标示初始时刻颗粒的位置,绿色虚线标示初始时刻聚并气泡中心) (a) 0;(b) 13.3 µs;(c) 26.6 µs;(d) 39.9 µs;(e) 66.6 µs;(f) 533.0 µsFig.4.Experimentally filmed time series of bubbles aggregating and driving particle motion at Rb1=24 µm,Rb2=25 µm,Rp=27 µm(Yellow dashed line marks the position of the particle at the initial moment,and the green dashed line marks the center of the aggregation bubble at the initial moment): (a) 0;(b) 13.3 µs;(c) 26.6 µs;(d) 39.9 µs;(e) 66.6 µs;(f) 533.0 µs.
实验Ⅱ进一步考虑在实际相关应用中,会出现气泡在较高黏度溶液中聚并的情况,如人体血液的黏度约是水的4—5 倍.本组实验将半径为36 µm 的Janus 颗粒置于甘油 H2O2水溶液(10%,V甘油/VH2O2水溶液)中,生成两个半径分别为47 µm和49 µm 的气泡(图5).与图2 相比较,增加了颗粒对气泡一侧界面演化的约束,在5 µs 时气泡颈部的生长基本不受颗粒的影响,见图5(b);而在10 µs 处,靠近颗粒一侧的颈部半径明显小于另一侧,说明在水动力作用下颈部的生长已经受到了颗粒的影响,见图5(c).然而,参考黄色标记线,可以发现颗粒并没有显著的移动.净位移主要出现在图5(d)—(f)中,气泡界面在Z方向回缩,r方向上拉伸.界面在惯性力作用下在r方向拉伸的同时,也受表面张力的作用,在不断收缩,使气泡趋向于稳定状态.从相对于绿色的标记线位置可以看出,这里气泡的反弹位移不明显,可以忽略.

图5 Rb1=47 µm,Rb2=49 µm,Rp=36 µm 时,实验记录气泡聚并驱动颗粒运动序列图 (a) 0;(b) 5 µs;(c) 10 µs;(d) 20 µs;(e) 30 µs;(f) 200 µsFig.5.Experimentally recorded bubble aggregation and driven particle motion sequence diagram at Rb1=47 µm,Rb2=49 µm,Rp=36 µm: (a) 0;(b) 5 µs;(c) 10 µs;(d) 20 µs;(e) 30 µs;(f) 200 µs.
当时间达到200 µs 后,推动颗粒的净位移为25.3 µm,这个时间段内,颗粒的平均速度高达0.12 m/s.气泡表面能的释放量为聚并过程未发生时的11.2%.由于增大溶液黏度后,气泡聚并后与颗粒弹开需要的时间较长.区别于之前的能量转化率,定义“初始动能转换率”专门来评价气泡聚并推动颗粒的能量利用率,即颗粒与气泡未发生脱离之前,气泡聚并赋予颗粒的动能Ev与气泡聚并前后表面能差值ΔEσ之比,即
其中,m为颗粒质量,v是气泡聚并开始到结束时间段内的颗粒最大驱动速度,Rb1,Rb2分别为聚并前两气泡的尺寸,Rb3为气泡聚并后的尺寸.
为了与前人对能量转化率的计算相对比,能量转化率的表达式为
实验Ⅲ考虑气泡与颗粒尺寸差异较大的情况.图6 中颗粒的半径为18 µm,气泡的半径分别为7.8 和10.4 µm,此类实验中颗粒的尺寸比气泡尺寸大得多,颗粒没有发生明显位移,而气泡被弹开.将气泡颗粒作为一个系统,若不考虑附近溶液对系统的能量耗散,这个系统机械能守恒,气泡聚并释放能量,气泡表面能转化为气泡动能,使气泡弹离颗粒.根据动量守恒,由于颗粒质量远大于气泡,故颗粒几乎未被推动,气泡被明显弹开.在图6(a)—(e)过程中,虽然没有推动颗粒,但由于气泡大小不一,较大气泡侧对颗粒的作用力更大,颗粒仍具有朝向左上的作用力,在图6(f)中,气泡自身不断形变从颗粒脱离、弹开.对比实验II 可见,当气泡与颗粒的相对尺寸小于某个临界值,便无法实现自驱动.

图6 Rb1=7.8 µm,Rb2=10.4 µm,Rp=18.0 µm 时,实验记录气泡聚并驱动颗粒运动序列图 (a) 0;(b) 5 µs;(c) 10 µs;(d) 20 µs;(e) 30 µs;(f) 200 µsFig.6.Experimentally recorded bubble aggregation and driven particle motion sequence diagram at Rb1=7.8 µm,Rb2=10.4 µm,Rp=18.0 µm: (a) 0;(b) 5 µs;(c) 10 µs;(d) 20 µs;(e) 30 µs;(f) 200 µs.
从实验Ⅰ—实验III 可以看出,气泡聚并过程对颗粒的驱动作用与它们的相对尺寸密切相关.首先,对比图5 与图6(a)—(c)过程,尺寸相对小的颗粒会更早地影响气泡颈部的生长,颗粒与颈部界面相互作用,使颗粒更容易被推动,产生位移;而与气泡尺寸相比,较大的颗粒在颈部生长过程中基本不受影响.其次,在气泡的表面能快速释放的阶段,小气泡释放的能量自然也比较小.因此,存在一个合理的颗粒、气泡相对大小范围,使颗粒产生有效位移,以达到较高的初始动能转换率.鉴于上述对气泡与颗粒相对尺寸影响气泡聚并驱动颗粒运动的实验,对低黏度溶液中的双气泡聚并驱动颗粒运动的位移及其的初始动能转换率与气泡、颗粒尺寸比值的关系进行统计,并只关注两气泡尺寸相近的情况(|Rb1/Rb2-1|<0.15),Rb=(Rb1+Rb2)/2为两气泡的平均半径.
如图7 所示,当Rb/Rp在0.7—1.4 之间时,颗粒被推动的位移随气泡与颗粒尺寸比出现近似线性增大.然而当Rb/Rp=1.7 时,颗粒并没有随之出现大幅位移,其原因可通过数值模拟来解释.据实验统计,当气泡半径在10—80 µm 范围,气泡与颗粒尺寸比在0.7—1.7 之间,气泡聚并演化为球形,界面演化对颗粒的驱动速度在0.01—0.40 m/s内.同时注意到,在Rb/Rp值为0.7—1.4 内,所对应微马达的初始动能转化率也随气泡与颗粒尺寸比呈线性增大.分析其原因,这个尺寸比范围内,颗粒足够大几乎可以完全捕获气泡聚并在颗粒方向上释放的表面能,所以其动能转化率主要由气泡与颗粒的大小来决定.根据动量守恒,小质量气泡速度大,大质量颗粒速度小,所以气泡尺寸小时,颗粒获得的初速度较小,故其初始动能转化率和位移都较小.从图7 可推测,在 1 .4<Rb/Rp<1.7 之间存在临界状态,颗粒尺寸的减小导致捕捉到的气泡聚并释放的表面能减小,初始动能转换率开始降低.

图7 双气泡聚并驱动颗粒运动的位移、初始动能转换率随气泡与颗粒尺寸比值的变化Fig.7.Variation of displacement,initial kinetic energy conversion rate with bubble to particle size ratio for double bubble aggregation and driving particle motion.
3 数值模拟
根据实验,气泡界面的非对称演化推动了临近颗粒.为了探究更多颗粒限制气泡聚并的细节,并且认识到双气泡聚并的界面演化驱动颗粒的运动机理,采用伪势格子Boltzmann 方法(伪势LBM)对靠近颗粒的双气泡聚并过程以及驱动颗粒运动的细节进行研究,通过对界面演化过程的分析来揭示双气泡驱动颗粒运动的流动机理.篇幅所限,暂不研究溶液浓度对双气泡生成的影响.
3.1 伪势LBM 模型
采用精确差分法作用力模型[21]和Carnahan-Starling (C-S)状态方程以获取较大密度比的LBM伪势模型[22].其分布函数形式为[23]
其中,ωα为平衡态函数对应的权重,ρσ与u分别为流体的密度和速度.对于D2 Q9 模型ω0=4/9,ω1-4=1/9,ω5-8=1/36 .
宏观密度ρ和流场的实际速度可以通过如下方法求得:
Fα为α方向上粒子之间的相互作用力,N个方向上的总力表示为
式中,g为粒子间相互作用强度,φ(X) 为有效密度,w(|eα|2)是用于计算各向同性相互作用力的权重.通过引入非理想流体状态方程,可以得到有效密度的表达式为
式中压力p由C-S 状态方程来求解:
Tc和Pc分别是临界温度和临界压力.一般为方便计算,规定,a=1,b=4 和R=1 .
颗粒的运动方程由牛顿第二定律得到,包括平动方程和转动方程:
其中M是颗粒质量,U是颗粒速度,F(t)是颗粒受力,J为转动惯量,Θ是角速度,T(t)是颗粒的扭矩.对于固体动边界的处理,采用半步长反弹格式及局部演化方法[24]:
其中i和分别表示流入和流出的方向,uw为边界速度,xc为型心位置.利用动量交换法获得颗粒边界上的表面力和力矩:
其中,B代表边界周围的格点,eα表示格子速度,其方向从当前流体格点指向固体格点.速度U和角速度Θ通过解方程获得.对于固体壁面的亲疏水作用采用流体与固体壁之间的黏附力表征[25].为了验证模拟方法的可靠性,模拟计算前进行了网格无关性验证以及Laplace 定律的验证.
3.2 模拟结果
图8 显示了计算区域,其四面均采用反弹边界条件,两气泡中心连线的中点位于模拟区域的中心,两气泡相界面间距为0.Janus 颗粒的位置与两气泡相切.此模型的边界长度L=2×10-4m,均匀划分为201×201 个网格,单个网格的长度δx=1.1×10-6m,时间步长δt=1.8×10-7s,温度与临界温度比值T/Tc=0.0658,液相与气相的密度比ρl/ρg=68.8 .模拟中的设置均为格子单位.
模拟设置两气泡半径Rb=20 µm,颗粒半径Rp=20 µm,如图9 所示.在图9(a)中,0 时刻,气泡接触打通了相界面,气泡内的流体开始互通.在奇点处受到黏性力、惯性力和表面张力的共同作用,聚并开始发生,颈部开始生长.图9(c)中气泡颈部两侧的形态出现差异,颗粒对颈部的进一步演化形成阻碍,此时颗粒没有明显的位移.图9(d)—(f)演化过程中,利用气泡相界面形变将颗粒推出.以上现象与实验中所观察到的情况比较相符,颗粒出现净位移的时间都在气泡颈部生长结束之后.通过模拟结果计算可知,颗粒的净位移为5.78 µm,相当于推进了半个颗粒的长度.
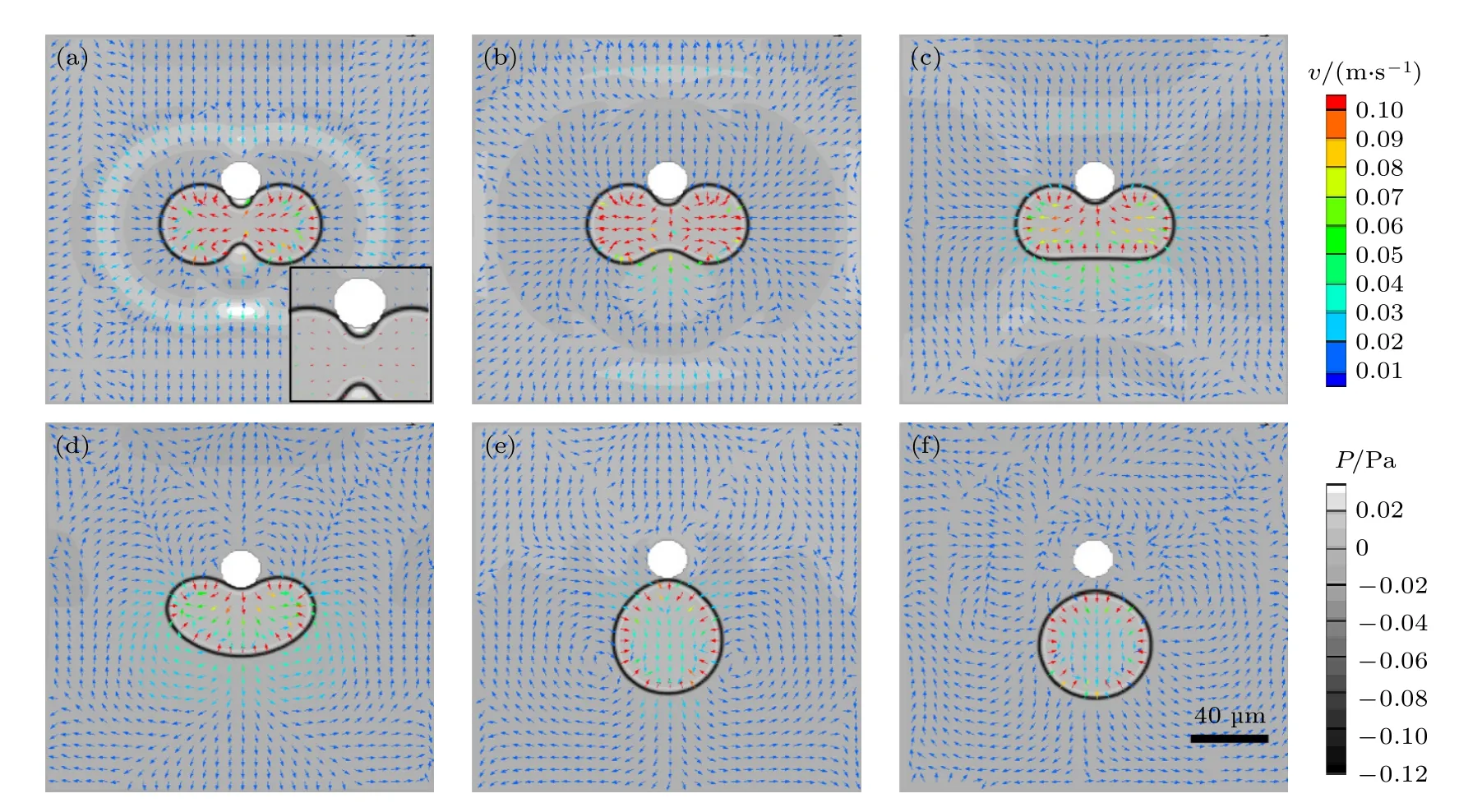
图9 不同时刻近颗粒气泡聚并演化过程压强及速度场变化 (a) 9.1 µs;(b) 18.3 µs;(c) 36.6 µs;(d) 73.1 µs;(e) 310.8 µs;(f) 914.1 µsFig.9.Variation of pressure and velocity fields during near-particle bubble aggregation and evolution at different moments: (a) 9.1 µs;(b) 18.3 µs;(c) 36.6 µs;(d) 73.1 µs;(e) 310.8 µs;(f) 914.1 µs.
为了清楚气泡聚并与颗粒的作用机制,监测了气泡聚并过程中流场压强与速度场的变化.由图9(a)可知,在t=9.1 µs 左右,气泡开始出现聚并,颈部两侧出现白色的高压区,在远离颗粒侧颈部的压强略低于近颗粒侧的压强,可见,颗粒制约了这一侧高压向溶液中扩散.同样,颈部生长的界面形变诱导附近流场,对颗粒有向r方向的作用力.气泡内部气体流速较高,有向外扩张的趋势.但是在界面表面张力的作用下,流体速度指向界面内.然而可以看到在聚并气泡外侧,有一圈高压区域,这是方法本身带来的虚拟压力.图9(b)中气泡聚并颈部一侧界面紧贴颗粒,高压区消失.另一侧由于颈部的快速生长,带动附近流体向r负方向流动.
到t=36.6 µs (图9(c)),远离颗粒侧的颈部生长已经完成,周围流场中的流体速度明显降低,由此反映出,气泡聚并颈部的生长速度逐渐降低.此时的颗粒依然未被明显推动.图9(d)中,Z方向上的气泡两端开始向内回缩,周围流体向O点流动.而由于受到颈部生长惯性的作用以及气泡内部Z方向流体受到挤压也向r的反方向运动,在远离颗粒侧的界面已经与原有的两个气泡的界面融合为一个具有更大曲率半径的界面.在贴近气液界面处流体速度梯度较大,随Z方向上的流体,向中心O流动.
图9(d)—(e)说明聚并过程中周围流体会持续作用,气泡在r方向上持续形变,颗粒被气泡推出.这个时段中颗粒出现明显净位移,也是整个演化过程中对驱动贡献最大的时间段.到t=310.8 µs 左右,Z方向上流体向中心O的流动速度减小,说明Z方向上的界面形变趋于稳定.根据速度场显示,颗粒周围更多流体向r方向运动,说明此时的颗粒正以较大的速度向r方向运动.在气泡界面将颗粒推动到最远处后,颗粒也会在流场的影响下,继续向r方向移动.气泡界面与颗粒相接触,呈现出水滴状,但在表面张力的作用下,气泡在Z方向回缩,与颗粒分离,即图9(f)所示.界面回弹势必会引起颗粒与气泡之间的流体,向r反向流动,这时颗粒也会在这部分流体的影响下,向r反向有小距离的回拉.回弹后的气泡已基本演变为一个球体.
图10 为实验与模拟中不同时刻气泡聚并推动颗粒的形态演化变化对比分析,发现数值模拟与实验的演化形态基本一致.颗粒拥有最大位移的时间均在t=100—200 µs 之间,即气泡聚并后在表面张力作用下Z方向开始向中间收缩,在惯性作用下r方向拉伸阶段,是驱动颗粒使之产生较大净位移的主要方式.通过数值模拟计算了不同气泡与颗粒尺寸比的初始动能转换效率以及驱动颗粒的位移,如图11所示.当Rb/Rp=4 时,大气泡驱动小颗粒会提高驱动位移,从而提高驱动速率,但是这个增量不足以抵消颗粒质量本身对动能的影响,造成了气泡尺寸与颗粒尺寸的比值越大,转换率越低.但是当Rb/Rp<1 时(图中绿色虚线左侧部分),上述规律并不成立,小气泡驱动大颗粒,首先释放的能量低,其次,从动量守恒考虑,颗粒质量远大于气泡,小气泡被弹开.模拟结果表明,颗粒的位移随气泡与颗粒尺寸比的增加呈现近似线性增长,在Rb/Rp=1 处的初始动能转换率达到最大,随着Rb/Rp逐渐接近0,几乎无法驱动颗粒.
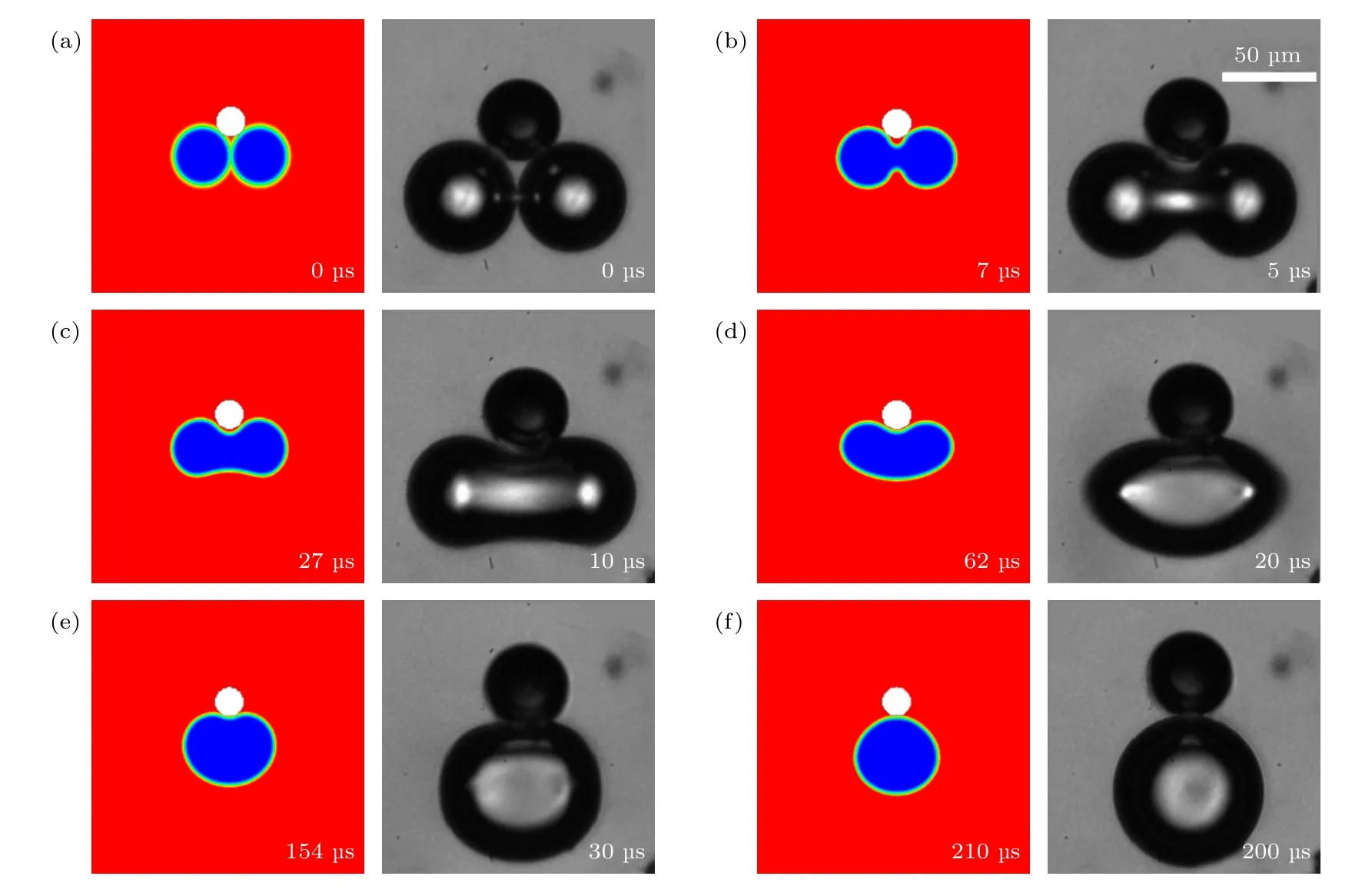
图10 实验与数值模拟气泡聚并驱动颗粒形态演化对照橙色框内为数值模拟结果(Rb=20 µm,Rp=10 µm),蓝色框内为实验结果(Rb1=41 µm,Rb2=39 µm,Rp=34 µm)Fig.10.Comparison of experimental and numerical simulations of bubble aggregation-driven particle morphology evolution.The orange box shows the numerical simulation results (Rb=20 µm,Rp=10 µm),and the blue box shows the experimental results(Rb1=41 µm,Rb2=39 µm,Rp=34 µm).
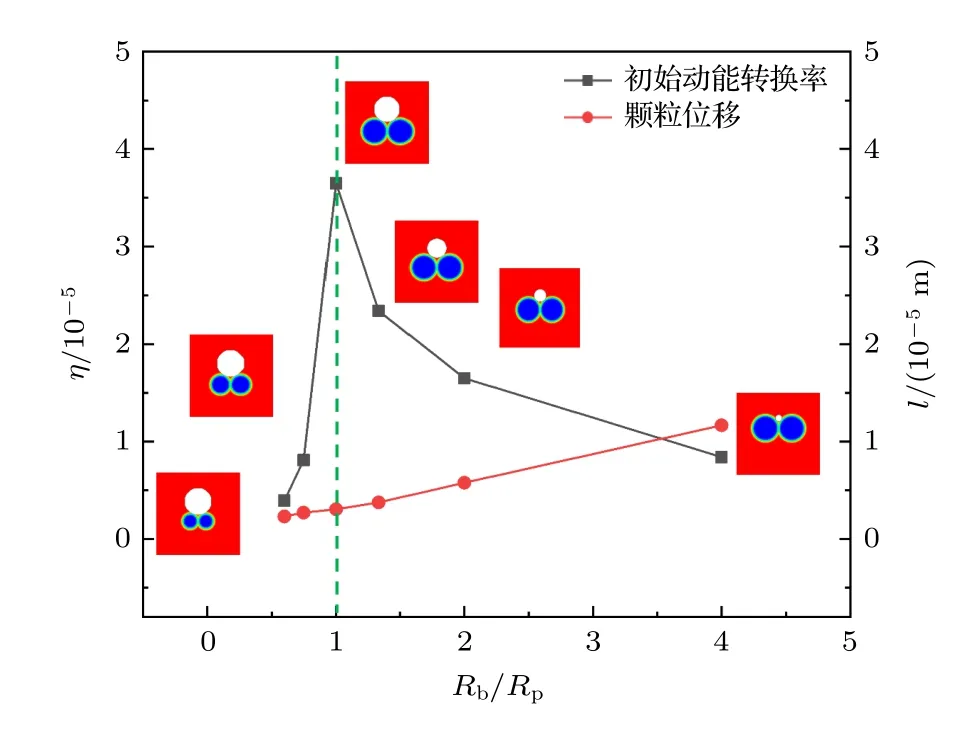
图11 气泡与颗粒尺寸比与初始动能转换率、颗粒位移之间的关系Fig.11.Relationship between bubble to particle size ratio and initial kinetic energy conversion rate,particle displacement.
4 讨论与分析
以观察到的实验现象为基础,通过数值模拟方法研究了微米量级的双气泡聚并驱动颗粒的多相流体动力学机制,阐明了双气泡聚并驱动微马达的可行性.实验中观察到,气泡发生聚并之后,没有立即发生破裂,而是在溶液中稳定存在一段时间,这个现象出现的概率随着溶液黏度的增大而增大.没有立即出现气泡溃灭或与界面融合的情况,也说明气泡聚并微马达适用于体相溶液中,且自由界面对气泡聚并过程的影响暂时可以忽略.
对比实验与数值模拟结果,获得了定性一致的结果,说明对气泡聚并的力学机制分析的正确性,但其中部分情况存在定量的微小差异.这原因可能在于,由于完整的气泡过程包括化学反应-气泡生长-气泡聚并-气泡脱离的连续过程,处于降低模拟难度与复杂性的考虑,在模拟中仅关注了气泡聚并这一关键环节进行研究,因此在数值模型的建立上进行简化.数值模拟中,没有考虑实际成核点位置与气泡生长的影响,根据实验Ⅰ和实验Ⅲ,从气泡表面能的释放量来看,对比无颗粒时的气泡聚并过程和气泡附着于颗粒生长过程中发生聚并,气泡生长对推动颗粒的运动影响不明显.
通过对颗粒周围速度场的观察,本文提出的双气泡聚并的驱动方式,这一现象可类比Jens 等[26]提出的自然界中“偶极泳动”中“Pusher”的一类,图12 中“马达”在后面形成的流场推动颗粒运动,出现“Pusher”的特征流场.这类似自然界中微生物通过鞭毛摆动,使得左右两侧流体向中间汇集,再向前后推动,进而实现泳动.本文提出的体系中气泡界面的聚并演化过程实际上实现了类似鞭毛的非对称运动效果,构造出了类似的流场.
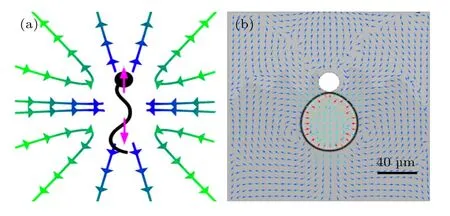
图12 (a)“力偶极子”微马达流场[26];(b)双气泡聚并微马达速度场Fig.12.(a) Flow field of the “force dipole” micromotor[26];(b) velocity field of the double bubble aggregation and micromotor.
在实验过程中发现,当两气泡尺寸差距较大,能够改变颗粒驱动的方向,在以后的研究中,若能实现对气泡大小的实时量化控制,那么对气泡聚并微马达的方向和速度调控会更加精确.然而,深刻的理解气泡聚并与颗粒之间相互作用的全部细节,需要进一步数值模型研究.目前模拟中采用二维多相流模型,可以在现象上给出流动机理的解释,精确的定量对比需要在三维模拟的基础上进行.
5 结论
本文提出用双气泡聚并方式驱动Janus 微球马达的新颖驱动方式,通过实验研究与数值模拟对气泡聚并驱动颗粒的力学机理与运动机制进行了研究,得到下列结论.
1)气泡聚并导致的界面振荡是驱动微马达运动的主要原因,其能量转化率介于管式微马达反弹驱动与气泡和界面融合驱动之间.
2)当气泡颗粒尺寸比在0.7—1.4 内,气泡聚并驱动颗粒的位移随气泡与颗粒尺寸比的增大而增大,初始动能转换率基本一致.
3)在黏度较小的溶液中,气泡聚并驱动颗粒产生净位移的主要阶段是气泡聚并颈部生长完成后,界面推动以及界面推出后,惯性作用的结果;在黏度相对较大的溶液中,气泡聚并驱动颗粒产生净位移的主要阶段只有气泡聚并颈部生长完成后,界面推动的结果.
