电动垂直起降飞行器气动布局分析(二)
2023-09-06符长青
符长青
电动垂直起降飞行器(eVTOL)要想实现垂直起降和空中悬停,必须要安装有能够产生克服重力的升力装置,简称空气螺旋桨。换言之,空气螺旋桨是它的必备之物。
空气螺旋桨的基本结构和工作原理
空气螺旋桨,也称为旋翼,是一种靠桨叶在空气中旋转将发动机转动功率转化为推进力或升力的装置。它由多个桨叶和中央的桨毂组成的,桨叶好像一扭转的细长机翼安装在桨毂上,发动机轴与桨毂相连接并带动它旋转。中国明代(1368~1644年)民间的玩具“竹蜻蜓”实际上就是一种原始的空气螺旋桨。喷气发动机出现以前,所有带动力的航空器无不以空气螺旋桨作为产生推进力的装置。当空气螺旋桨应用到无人直升机和多旋翼无人机上时称为旋翼,这只是一种习惯用语,虽然名称不同,但是其结构和工作原理是一样的。
截取空气螺旋桨一小段桨叶来看,恰像一小段机翼,其相对气流速度由前进速度和旋转速度合成(如图1所示),桨叶上的气动力在前进方向的分力构成拉力。在旋转面内的分量形成阻止螺旋桨旋转的力矩,由发动机的力矩来平衡。桨叶剖面弦(相当于翼弦)与旋转平面夹角称桨叶安装角。螺旋桨旋转一圈,以桨叶安装角为导引向前推进的距离称为桨距。实际上桨叶上每一剖面的角速度都是相同的,但线速度则与该剖面距转轴的距离(半径)成正比,所以各剖面相对气流与旋转平面的夹角随着离转轴的距离增大而逐步减小,为了使桨叶每个剖面与相对气流都保持在有利的迎角范围内,各剖面的安装角也随着与转轴的距离增大而减小。这就是每个桨叶都有扭转的原因。
空气螺旋桨分为定距螺旋桨和变距螺旋桨两大类。定距螺旋桨的桨叶安装角(桨距)是固定的。优点是构造简单,重量轻;缺点是只在选定的速度范围内效率较高,在其他状态下效率较低。变距螺旋桨的桨叶安装角(桨距)可变,高速时用高距,低速时用低距。螺旋桨变距机构由液压或电力驱动,可使螺旋桨始终处于最佳工作状态。
影响空气螺旋桨(旋翼)工作效率的因素有很多,其中主要有以下几种。
(1)旋翼直径。旋翼旋转时,叶尖所划圆圈的直径叫做旋翼直徑。直径是影响旋翼性能重要参数之一,一般情况下,旋翼直径增大拉力随之增大,效率随之提高。所以在结构允许的情况下尽量选直径较大的旋翼。此外还要考虑桨尖气流速度不应过大,否则可能出现激波,导致效率降低。
(2)旋翼桨叶翼型。旋翼桨叶的剖面形状称为翼型,它是旋翼能够产生拉力的关键因素。当旋翼转动时,每片桨叶都会产生升力,所有桨叶产生的升力合成为一个向上的总拉力,该总拉力克服了无人机本身的重量,从而能够使无人机升空飞行。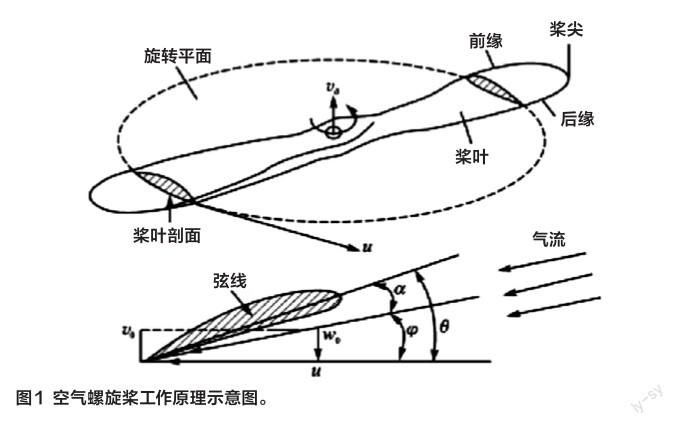
(3)旋翼旋转速度。旋翼转速一般以每分钟转的圈数为单位,而角速度以每秒钟一个弧长为单位。提高旋翼转速将要受到叶尖速度的限制,以避免叶尖出现过大的空气压缩效应。目前旋翼的叶尖速度为ΩR=180~220m/s,大约相当于叶尖0.55~0.6Ma。
(4)旋翼实度。旋翼实度是指其所有桨叶实际面积之和与整个桨盘面积的比值(常用希腊字母σ表示),通过桨叶剖面弦长和叶片数量可以增加旋翼的实度,高实度会带来高扭矩和高功率的需求。
一个空气螺旋桨的桨叶片数通常有2、3、4、5、6、7、8、9片桨叶,一般桨叶数目越多吸收功率越大,但最好不要超过5片桨叶。实践中发现:具有5片桨叶的空气螺旋桨工作效率最高,超过5片桨叶后空气螺旋桨工作效率反而下降。高桨盘载荷和同时低叶尖马赫数通常需要螺旋桨高桨距设置和高旋翼实度,典型的代表就是电动垂直起降飞行器Joby S4旋翼的实度(图2d)比传统直升机上通常使用的旋翼实度(图2a,b,c)要高很多。
(5)旋翼桨叶的平面形状。桨叶的平面形状,特别是桨尖形状对旋翼性能有着重大的影响。桨叶桨尖区域是一个非常敏感的区域,它既是桨叶的高动压区,又是桨尖涡的形成和逸出之处,桨尖形状小小的改变就能导致桨尖涡的强度和轨迹有较大的变化,从而影响旋翼的流场、气动载荷和噪声。
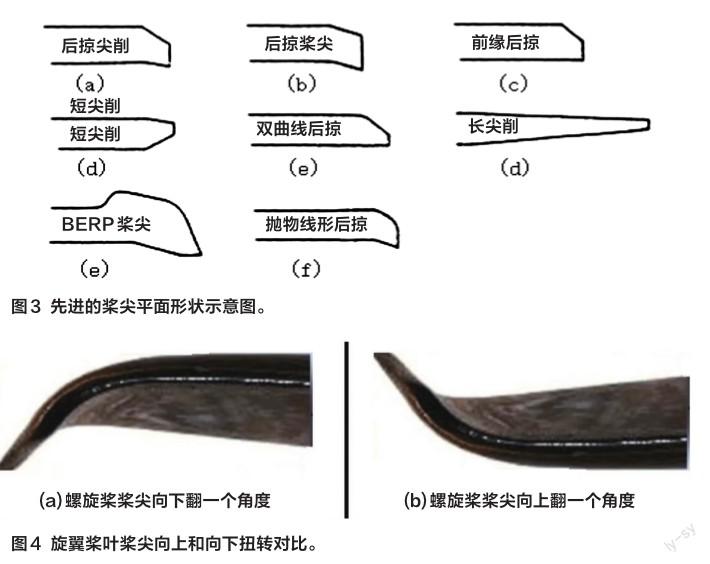
桨叶尖部形状对旋翼的气动噪声和前行桨叶的激波失速有重要影响,还有可能给桨叶带来有利的动态扭转,因此,采用先进、合适的桨尖形状,能有效地改进旋翼的气动特性,可延缓气流分离(前、后行)、改善气动载荷分布及桨涡干扰、降低振动和噪声、提高气动效率等。各种先进的桨尖形状如图3所示,包括后掠尖削、后掠桨尖、前缘后掠、短尖削、双曲线后掠、长尖削、抛物线型后掠等,研究表明后掠桨尖能够缓解压缩性影响,同时,由于桨尖翼弦长度变小,使边缘涡流密度减小,又延缓了后行桨叶的气流分离,大大改善了旋翼的气动特性。
(6)旋翼桨叶桨尖扭转。旋翼是电动垂直起降飞行器(eVTOL)进行垂直起降和空中悬停飞行时主要的升力部件,其气动性能的优劣直接决定了eVTOL的飞行性能。受材料、加工工艺等技术条件的限制,早期的有人驾驶直升机旋翼桨叶主要采用矩形桨叶、小线性负扭转等设计方案。现在,随着材料、加工工艺等技术的进步,早先的难题获得了不同程度的解决,许多新型气动外形桨叶得到了应用。除了采用先进的桨尖平面形状外,为了有效地提升电动垂直起降飞行器(eVTOL)性能,其使用的旋翼桨叶已经从早期的简单外形发展到具有特殊平面形状、非线性负扭转和桨尖扭转等多种外形设计,其中旋翼桨叶进行桨尖扭转的旋翼气动外形设计已成为eVTOL获得成功的关键技术之一,如图4所示。
试验结果数据表明:旋翼桨叶桨尖向上或向下翻一个角度都能提高其气动效率,使eVTOL具有更好的悬停性能,同时能显著降低噪声。至于是向上翻好,还是向下翻好,以及翻多大角度(扭转角)才最佳,对于不同实度的旋翼不一样,需要通过风洞试验或采用旋翼计算流体动力学(Computational Fluid Dynamics,CFD)通过理论计算获得最佳结果。
开放螺旋桨的结构和工作原理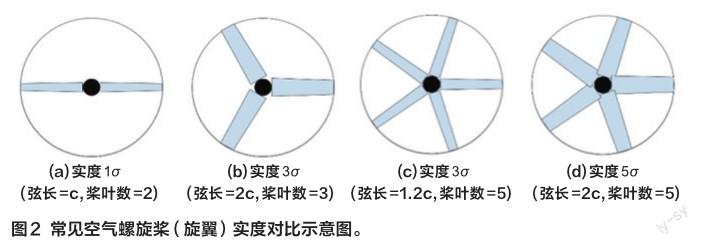
安装在无人机上的空气螺旋桨,除了按其使用的飞行平台习惯上分为两大类:安装在固定翼无人机上称为螺旋桨,安装在无人直升机和多旋翼无人机上称为旋翼以外,人们还按其外面有没有安装涵道分为两类:安装了涵道的称为涵道风扇(或涵道螺旋桨)系统;没有安装涵道的称为开放螺旋桨(或开放旋翼)系统。
常规的无人直升机大多采用开放旋翼系统,头顶上顶着一个或两个直径很大的旋翼;电动垂直起降飞行器(eVTOL)有两种气动布局形式,一种是多旋翼气动布局,另一种是复合气动布局,在固定翼无人机上增加安装多台开放螺旋桨或涵道风扇。无论是哪一种气动布局,电动垂直起降飞行器(eVTOL)采用的开放空气螺旋桨的直径都比无人直升机的旋翼直径小,目的是优化结构,减小噪声。开放螺旋桨(或开放旋翼)系统结构简单实用,悬停升力效率高,不仅适用于无人直升机,也为大多数电动垂直起降飞行器(eVTOL)所采用,如图5所示。
(1)单旋翼带尾桨无人直升机(图5a)沿用了现代直升机最常用的气动布局结构,升力系统由一个水平布置的大开放螺旋桨(称为主旋翼)和尾部一个小垂直螺旋桨(尾桨)组成。主旋翼转轴近于铅直地安装在发动机或主减速器主轴上,每片桨叶的工作原理类同于固定翼飞机的一个机翼,主旋翼在发动机驱动下高速旋转,即桨叶在主轴带动下做高速旋转运动,与周围空气发生作用,产生向上的升力,把无人机举托在空中。发动机同时也输出一小部分动力至尾桨,产生抵消旋翼反扭矩的侧向力,如图6所示。
(2)采用双旋翼(空气螺旋桨)的无人直升机有多种不同的气动布局方案,两个开放螺旋桨(旋翼)可以前后串列:纵列式(图5b),可以左右并列:横列式(图5c),可以上下共轴:共轴式(图5d),还可以上下不共轴:叉动式(图5e)。虽然无人直升机每种气动布局方案都有其各自的优缺点,但是不论是何种类型的双旋翼无人直升机,两副旋翼的相对位置如何布置,其两副旋翼的旋转方向一定是相逆的,以达到两副旋翼的反扭矩彼此抵消的目的。
(3)大多数电动垂直起降飞行器(eVTOL)设计方案采用4个或4个以上双数(4,6,8,10,12??)个旋翼,其原因主要也是为了让成对旋翼的反扭矩相互抵消(图5f)。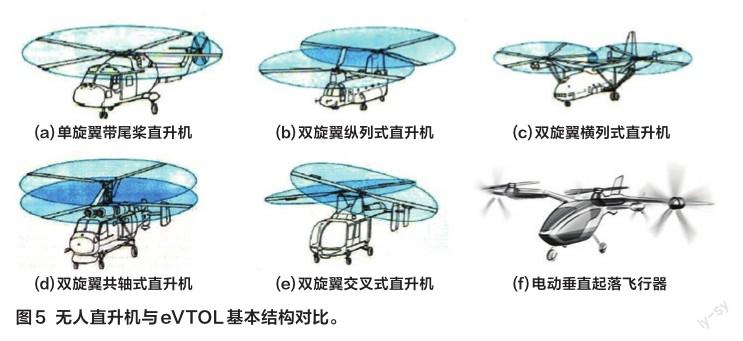

涵道风扇的结构和工作原理
涵道风扇的基本结构和工作原理
如果在空气螺旋桨外面加一个圆桶形外壳将空气螺旋桨保护起来,就构成了一种新的空气螺旋桨结构体,称为涵道风扇(Ducted Fan),如圖7所示。虽然开放螺旋桨结构简单实用,应用广泛,但是,由于空气螺旋桨旋转运动时主要存在的阻力有空气摩擦阻力、压差阻力、诱导阻力和干扰阻力等,桨叶因高速圆周运动使叶尖处速度最高,诱导阻力比较大,对外界气流产生冲击造成噪声大,超出了城市居民能够接受的水平,这是开放螺旋桨动力效率低的主要原因。
另外,由于开放螺旋桨是悬臂梁结构杆件,在气动力作用下叶尖处容易变形导致效率进一步恶化,受到音障限制,导致安装了开放螺旋桨的无人直升机的前飞速度一般不会超过200~300km/h。
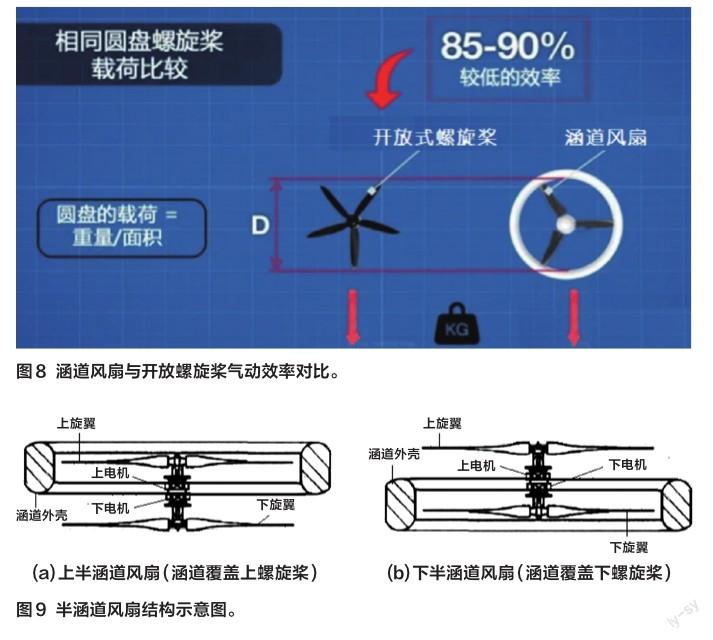
为了克服开放螺旋桨的这些固有缺陷,涵道风扇应运而生。涵道风扇系统的结构特点是把空气螺旋桨(旋翼)包在一个由复合材料制成的直径比较小的涵道内部,当空气螺旋桨旋转时形成所谓涵道气流。涵道风扇的工作原理与无人直升机开放螺旋桨(旋翼)相同,它们的区别在于两者的工作环境有较大差别。涵道风扇无人机在前飞时,涵道处于前方来流和风扇吸流的复杂气流中,其升力、阻力和俯仰力矩对整机的配平乃至稳定控制具有决定性影响。由于涵道风扇内空气螺旋桨的桨叶桨尖处空气流动受涵道限制,因而冲击噪声减小,诱导阻力减少,气动效率较高,大约能提高10%~15%,如图8所示。在同样功率消耗下,涵道风扇比同样直径的开放旋翼可以产生更大的升力。
在相同的螺旋桨转速下,涵道螺旋桨的滑流区气流速度要小于开放螺旋桨,导致涵道风扇系统的螺旋桨拉力小于开放螺旋桨拉力,但是涵道壁会产生附加拉力,使得涵道风扇系统的整体拉力要大于开放螺旋桨的拉力。另外,涵道风扇的扭矩略小于开放螺旋桨的扭矩,这主要是由于涵道的存在改变了滑流状态,使得涵道风扇系统的整体拉力大为提高,而扭矩却略微减小。
涵道产生气动效率增益的原理主要有两点:首先,涵道必须足够高,通常涵道的高度h应大于0.4D(直径),并且有一个完整的圆润饱满的边缘。涵道的存在使得螺旋桨的滑流场发生改变,降低了空气滑流速度,改善了螺旋桨桨尖区域的绕流特性,减少了桨尖损失,从而在一定程度上提高了螺旋桨的气动效率;其次,螺旋桨吸流在涵道唇口处产生绕流,形成低压区,使涵道产生附加拉力,涵道壁上的拉力最大可达总拉力的60%左右。与此同时,由于涵道的环绕作用,其结构紧凑、气动噪声低、不易受外界因素干扰、使用安全性好。涵道风扇的缺点是:为了提高气动效率要求桨叶的叶尖和管道间的间隙要非常小,通常要求螺旋桨桨尖和内壁的距离控制在桨盘直径的5‰之内。一般来说,涵道三维形状设计相当复杂,设计和制造一个优秀的涵道是一项非常复杂的工作,因为设计不当的涵道除了会增加额外的重量,还会引起振动加大,甚至发生颤振,从而产生更多的噪声。另外,当把涵道风扇实际应用到航空器上作为动力装置使用时,对航空器整体结构系统有更高的功率要求,原因是在开放螺旋桨的基础上增加了一定的结构,也就增加了空气阻力和系统的重量。
涵道风扇内的螺旋桨(旋翼)数量有两种,一种是单个螺旋桨(旋翼),另一种是共轴双旋翼:有两个直径和结构相同的螺旋桨(旋翼)绕同一理论轴线一正一反旋转,起到相互抵消反扭矩的作用。对于共轴双旋翼的涵道风扇,根据涵道内包含螺旋桨(旋翼)的数量(1个或2个)分为两类:
(1)全涵道风扇。不论涵道内的螺旋桨(旋翼)是一个还是两个,如果所有的螺旋桨(旋翼)完全包含在涵道内,则称之为“全涵道风扇”。
(2)半涵道风扇。对于共轴双旋翼涵道风扇,如果只有1个螺旋桨(旋翼)包含在涵道内,另一个完全曝露在涵道外,则称之为“半涵道风扇”,如图9所示,如果包含在涵道内的是上螺旋桨(旋翼),则称为“上半涵道风扇”。反之,如果包含在涵道内的是下螺旋桨(旋翼),则称为“下半涵道风扇”。
自适应涵道风扇的结构和工作原理
自适应涵道风扇(Adaptive Ducted Fan,ADF)是一种进气口可随飞行状态的变化而自动改变其大小的涵道风扇。由于安装了涵道风扇作为升力系统的电动垂直起降飞行器,在垂直起降和空中悬停飞行过程中功率消耗大,因此所需的空气流量也需要增大。一般普通涵道风扇进气口大小是固定不变的,显然无法满足这一要求。为了解决这一难题,人们提出了自适应涵道风扇设计方案,如图10所示。
自适应涵道风扇在进气口打开状态时,可以在管道中产生更大的空气量,提高气动效率,降低损耗,在垂直起飞和降落时增加推力,达到提高起飞重量的目的。而在进气口收回状态时,具有更优的空气动力学效应,减少风阻,适应于电动垂直起降飞行器前飞和巡航飞行状态。
自适应涵道风扇与固定口径的普通涵道风扇相比较,优势明显。
(1)自适应涵道风扇提高了垂直起降飞行器悬停时的气动效率(约60%)。
(2)减小了涵道风扇的体积(大约1/4)。
(3)减小了涵道风扇的重量(大约1/4)。
(4)降低了巡航飞行时涵道风扇的空气阻力(大约20%)。
图11显示开放螺旋桨、常规涵道风扇和自适应涵道风扇三种不同推进系统,应用到电动垂直起降飞行器上以相同前飞速度进行巡航飞行时,所需螺旋桨直径大小的对比情况。从图上可以看出:开放螺旋桨所需的直径最大,常规涵道风扇次之,自适应涵道风扇最小。这就意味着自适应涵道风扇在尺寸、重量和生产成本上都有比较大的优势。
环形螺旋桨的结构和噪音水平
环形螺旋桨的结构
扭曲环形螺旋桨看起来形状非常奇特,但它却是航空领域的革命性技术进步,把它安装在航空器上替代以往安装的开放旋翼或涵道风扇,在空中飞行时大大降低了噪声,比以往安静得多,而且气动效率也有很大的提高,经济效益可提高20%。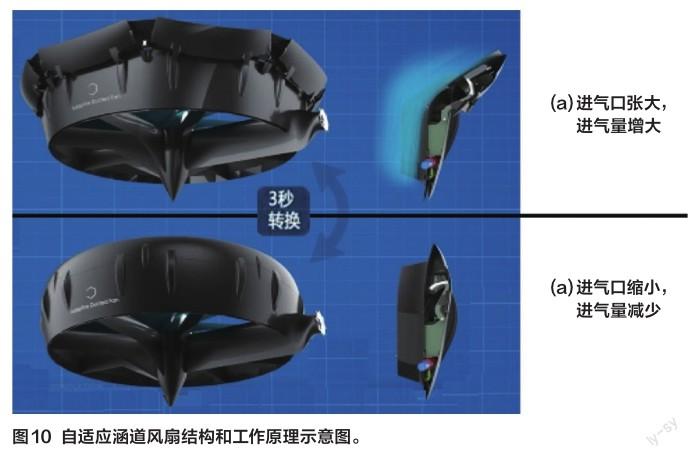
航空器使用传统的螺旋桨(开放旋翼或涵道风扇)遇到的一个关键问题是它们飞行时会发出令人讨厌的噪声,因为大部分噪声与婴儿哭声的频率范围相同,人们对频率从100Hz到5kHz之间的声音最为敏感。为了解决传统螺旋桨噪声扰民问题,麻省理工学院林肯实验室(MITs Lincoln Laboratory)的一个研究团队发现:可以用扭曲环形螺旋桨来降低传统螺旋桨的噪声。经过几次尝试,该团队确实发现了一种环形螺旋桨设计,如图12所示。
环形螺旋桨的噪声水平
虽然运行环形螺旋桨的无人机發出的声音水平,与普通无人机的噪声水平大致相当,但是噪声传播距离大约只有普通无人机噪声传播距离的一半。原因是环形螺旋桨产生的涡流分布在整个桨叶形状上,而不仅仅是在桨尖部分。这使得它在大气中能有效地、更快地消散。由于漩涡不会传播太远,人们不太可能听到它。更重要的是,它们的环形形状不仅增加了结构的稳定性,还减少了桨叶切割、剪切或碰到物体的几率。环形螺旋桨缺点是桨叶的形状相当复杂,所以它们比使用廉价而简单的注塑成型的标准桨叶更难制造,需要3D打印出来。
电动涵道喷气发动机的结构和工作原理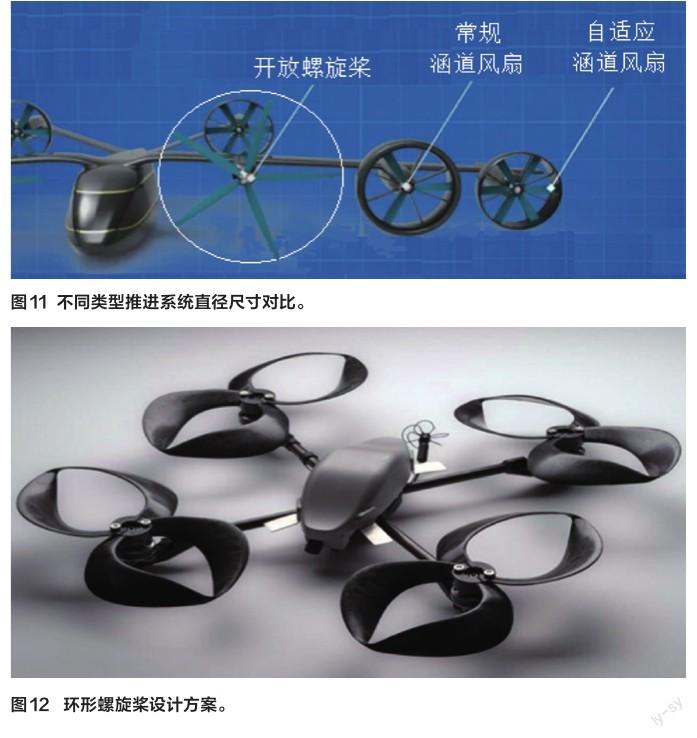
电动涵道喷气发动机是新一代先进的航空发动机装置,属于一种全新概念的喷气发动机类型,其核心技术基础是采用涵道电动矢量推力技术(Ducted Electric Vectored Thrust, DEVT),用电动机驱动管道内涡轮转子(叶轮)高速旋转,对进入管道内的空气流进行加速加压;其结构与传统的为95%商用航空器提供动力的喷气发动机完全不同,它只有涡轮转子(叶轮)和拉瓦尔喷气管道,没有燃烧室,仅依赖于由零排放电动机驱动的单级涡轮转子/定子系统产生向后的推力,例如德国百合花电动飞机公司的复合eVTOL的设计方案,在每个固定机翼的襟翼上都安装有三个电动涵道喷气发动机,襟翼可以各自独立倾转,允许安装其上的电动涵道倾转,从而改变它们产生的推力方向,如图14所示。从图上可以看出:当襟翼处于垂直状态时,复合eVTOL通过它襟翼上安装的电动涵道喷气发动机涡轮转子推力矢量,提供其垂直起降和悬停飞行所需的升力;当复合eVTOL转换为向前飞行模式时,该电动涵道喷气发动机涡轮转子推力矢量转向90°,指向后方,提供前飞所需的推力。
电动涵道喷气发动机的结构和倾转工作状态如图13所示。与开放螺旋桨及涵道风扇推进器相比,其优点非常明显:结构简单,机械部件少,重量轻,制造成本和维护成本低,故障率低,安全性好,巡航飞行状态效率高,噪声低,占用空间小和可扩展性好等。其缺点是在悬停飞行状态下会导致 50% 的功耗损失,悬停升力效率比较差。
为了改善悬停升力效率,电动涵道喷气发动机采取的技术措施是安装可调控喷嘴,即可以依据飞行状态改变喷气管道截面形状。在巡航飞行(平飞)状态,电动涵道喷气发动机的喷气管道截面面积最小;当需要退出平飞状态,进入过渡飞行阶段时,随着电动涵道喷气发动机向下倾转,逐渐打开喷嘴,即逐渐扩大喷气管道截面面积;最后进入垂直起降和悬停飞行状态时,喷嘴完全打开,喷气管道截面面积最大。对于流速小于声速的亚声速气流,当流过收敛型管道时,随着管道截面积的减小,流速升高,同时伴随压力、温度降低。当流过扩散型管道时,随着管道截面积增大,流速降低,同时伴随压力、温度升高。收敛-扩散型管道,即前端为收敛型管道,后端连接着扩散型管道,这种管道称为拉瓦尔管,如图14所示。
拉瓦尔管在正常工作状态下,亚声速气流在收缩段加速,至喉道(即管中横截面最小处)达到最大流速,进入扩张段继续加速,直到管道出口为止。就功能而言,拉瓦尔喷管实际上起到了一个“流速增大器”的作用,在航空器上有非常广泛的应用。
(未完待续)
