一种空间目标异动威胁评估的贝叶斯网络模型*
2023-09-04曲宗华魏春岭
曲宗华,魏春岭
1.北京控制工程研究所,北京 100094 2.空间智能控制技术重点实验室,北京 100094
0 引言
近年来,越来越多的国家将战略重心转移至太空,在轨航天器数量与日俱增,美国、俄罗斯等国均已建立太空部队。同时,空间中还存在大量空间碎片,美国联合太空作战中心(CSpOC)监测并编目超过10 cm的空间碎片数量已超过2.3万件[1-2]。碎片与航天器之间的相对运动速度可达每秒千米量级,一旦发生碰撞可能会导致太阳能帆板、燃料贮箱等重要部件受损,使得卫星寿命缩短、部分功能失效,甚至会对航天器造成毁灭性破坏[3]。面对日益复杂的空间环境、愈发恶劣的空间条件,如何及时发现并精准评估空间目标的威胁程度是保障乙方航天器在轨安全稳定运行的关键前提[4-5]。
空间威胁评估是空间态势感知的重要组成部分,主要作用是判定空间目标对乙方航天器的威胁程度。威胁评估的经典方法主要有D/S证据理论[6]、专家系统[7]、贝叶斯网络[8]等。在空间目标威胁评估方面,王扬洋等[9]提出一种基于视觉特性的临近目标行为辨识方法。提取抵近的空间非合作目标的特征点并对其进行跟踪,获取轨迹的变化并对可能存在的行为进行表征分析,构建特征参数进行行为判断,通过对不同光照条件的连续图像进行处理,实现了对抵近观察较为有效的辨识结果。针对主动接近式的非合作航天器,吴丽君等[10]提出一种威胁指标计算模型,利用双脉冲 Lambert 算法得到交会所需脉冲冲量和交会时间,以其为威胁要素,选择最具威胁性的接近路线进行威胁要素的加权,计算得到综合威胁指标,通过Matlab仿真验证该模型的准确性和实时性。
此外,威胁评估技术广泛应用于空战场和海战场,如:刘芳等[11]将贝叶斯网络和逼近理想解法进行融合,通过分析特征指标的依赖关系建立空中威胁评估的指标体系,利用贝叶斯进行动态威胁度等级概率推理,同时构造模糊贝叶斯推理结果与逼近理想解矩阵映射关系,实现对空中多目标威胁程度的准确排序。高擎峰等[12]设计了一种闭环动态贝叶斯网络用以评估空间目标威胁,但该网络模型的节点数较少且采用直接分类的方法对相对位置等节点进行赋值,难以准确刻画变化趋势,同时对于复杂场景和连续变化的时间片威胁评估能力仍有待提升。
由于空间目标的异动行为隐蔽性强,单一维度数据或底层特征存在局限性,难以对目标的潜在威胁进行准确刻画。因此,需融合更高级别特征、先验知识等多源信息实现空间目标异动行为的威胁评估。本文引入空间目标的运动、形态等异常特征,历史行为、目标类型等先验知识和相对距离、相对速度等数据信息,在分析这些信息的依赖关系基础上,设计一种基于离散模糊贝叶斯网络的空间目标异动行为威胁评估模型,实现典型场景下的空间目标威胁评估。本文的行文思路是:介绍贝叶斯网络结构和推理过程;针对空间目标异动行为威胁评估问题开展指标选取和指标赋值的研究工作;在此基础上,分析选取指标间的依赖关系,构建基于离散模糊贝叶斯网络的威胁评估模型;之后,通过模拟空间中抵近绕飞和碰撞2种典型场景,利用威胁评估模型推理和分析各个时间步的威胁程度;最后,给出全文的结论。
1 贝叶斯网络原理
贝叶斯网络(Beyesian Network,BN)以概率论和图论为基础,结构是一个有向无环图(Directed Acyclic Graph,DAG),由节点和节点之间的有向弧段组成,也被称为信度网络或概率网络。节点代表的是随机变量,可以为连续变量或离散变量。有向弧是节点之间的有向连接,代表的是随机变量之间的依赖关系,是一种因果关系的呈现。节点可以分为父节点和子节点,若有向弧从A节点指向B节点,则B节点为子节点,反之A节点为父节点。特别地,没有父节点的节点为根节点,没有子节点的节点称为叶节点。条件概率表(Conditional Probability Table,CPT)代表的是节点变量之间互相的依赖关系,是一种定量描述方式。贝叶斯网络可以被定义为:
BN=〈G,Θ〉
(1)
式中:BN代表贝叶斯网络,G代表贝叶斯网络中对应的有向无环图表示形式,Θ代表贝叶斯网络的参数集合,由一系列条件概率组成。进一步的,G可表达为:
G=(V,E)
(2)
式中:V代表节点变量,E代表节点变量之间的依赖关系(有向弧集合)。
图1为一种贝叶斯网络结构。A是C和D的父节点,B是D和E的父节点,D同时为A和B的子节点。贝叶斯网络结构可以对属性之间的条件独立性进行有效表达,假设贝叶斯网中每个属性都和非后裔属性独立。
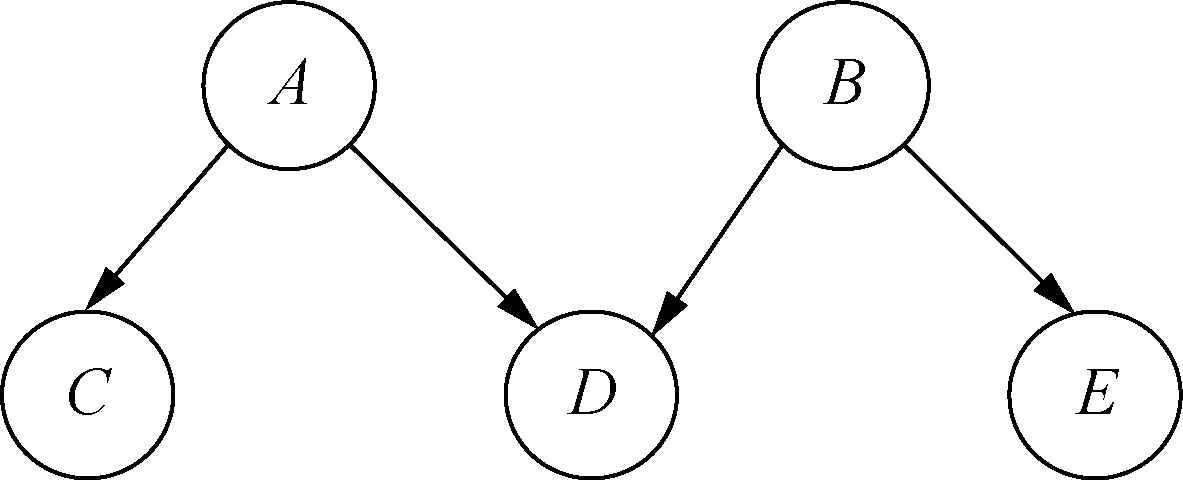
图1 贝叶斯网络示意图
由图1贝叶斯网络可以得出,该网络节点A、B、C、D和E的联合概率分布表达式为:
P(A,B,C,D,E)=
P(A)P(B)P(C|A)P(D|A,B)P(E)
(3)
以此类推,贝叶斯网络中所有随机变量的联合分布概率可以表达为:
(4)
式中:fparent(xi)代表节点xi的父节点,各个节点的概率连乘后即可获得所有随机变量联合分布的概率取值情况。
2 威胁评估模型指标
2.1 威胁指标选取
在进行网络搭建时,首先需要关注与威胁程度关系密切的节点。通过分析,影响威胁评估的各个关键节点(因素)的名称分别为:
1)目标形态异常特征(Abnormal Morphological Features,AMF):根据传感器采集的图像数据等信息判定是否存在相机持续对准已方航天器等形态异常;
2)目标所处轨道阶段(Orbital Phase,OP):通过时序序列处理方法对空间非合作目标的轨道阶段进行预测并作为贝叶斯网络的输入,可分为轨道保持、抵近、绕飞和飞离4种状态;
3)空间目标与乙方航天器之间的相对距离(Relative Distance,RD):相对距离较远时受到探测器探测距离等因素限制,对乙方航天器造成威胁的可能性相对较低,而威胁程度将随着相对距离的缩短而逐渐加大;
4)空间目标与乙方航天器之间的相对速度(Relative Speed,RS):相对速度快则代表该目标的机动性较好,抵达我方附近的用时较短,潜在威胁程度相对更大;
5)历史行为(History Behavior,HB):有些空间非合作目标既往已对乙方航天器或其它类型航天器产生迫近、侦察等异常扰动行为,此时可以判定该目标在空间中的意图不纯,对我方的潜在威胁性更高;
6)光照条件(Light Conditions,LC):当太阳光照与目标航天器之间的夹角小于30°时,光学成像条件有利于获取空间非合作目标的图像数据,图像分割的准确程度相应有所提升;
7)空间目标所属类型(Target Type,TT):该目标类型与威胁程度有较大关系,如只是空间碎片或废弃卫星等无机动能力的空间目标,则其主动改变轨道或产生威胁的可能性较低;
8)载荷工作状态(Payload Working Condition,PWC):载荷是否面向待观测的空间非合作目标,若保持正常工作状态,则能够获取目标的最新状态数据,有助于精准评估威胁;
9)探测条件(Detection Condition,DC):在光照条件的基础上,结合相对距离和载荷工作状态判定当前的探测状态,若探测条件好则发现空间目标异常行为的可能性大;
10)告警信息(Alarm Information,AI):综合是否存在异常形态和历史上有无迫近扰动行为,系统是否存在相应的预警信息;
11)静态威胁(Static Threats,ST):结合空间目标类型和探测条件等指标,综合判定静态条件下的威胁程度;
12)动态威胁(Dynamic Threats,DT):结合相对距离、相对速度和轨道目前阶段的运动特征等指标,综合判定动态条件下的威胁程度;
13)威胁估计(Threat Estimation,TE):结合预警信息、动态和静态条件下的威胁情况综合评估已方航天器的潜在威胁程度。
节点集合情况如表1所示。
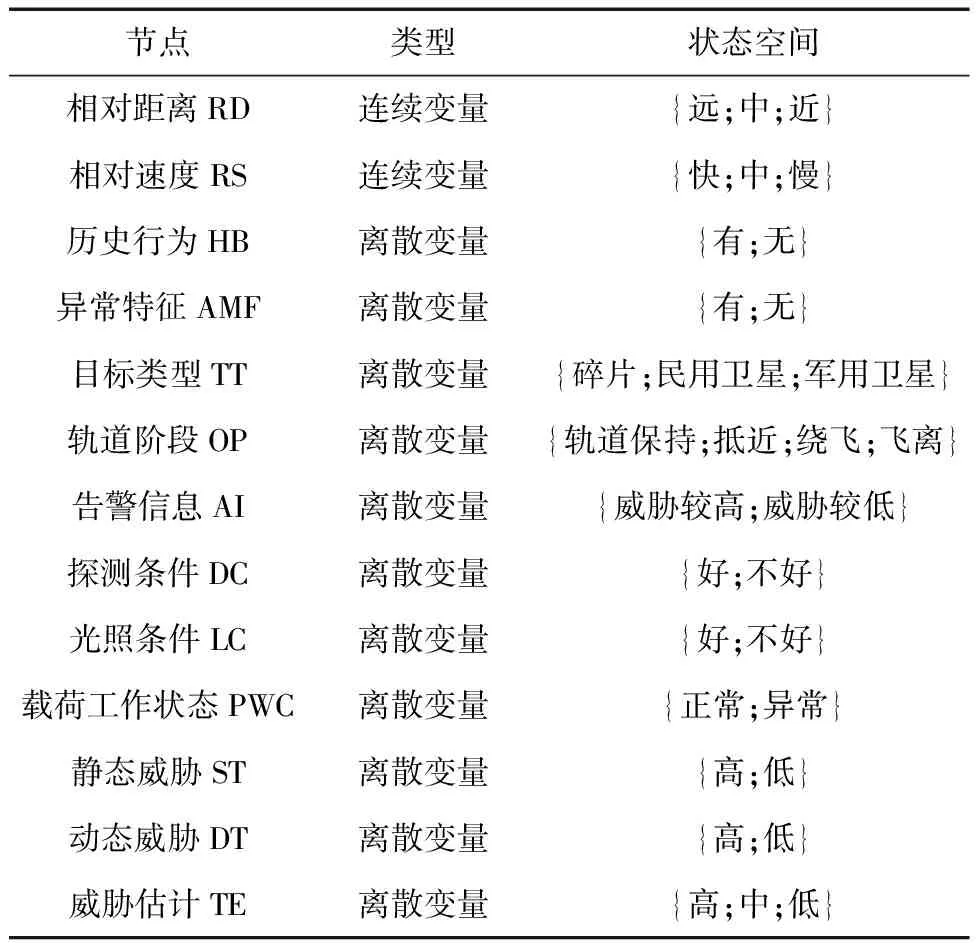
表1 节点集合
2.2 威胁指标取值范围
当输入的数据类别为离散变量时,可以直接判断所属类型,此时可通过该类型结果取1,其他类型取0的方式赋值节点。
但当输入的数据类型为速度和距离等连续变量时,采用模糊集合的方式计算其归属的类别以化为离散型变量。在进行离散化计算时,采用隶属度函数确定连续变量取值所对应的节点状态概率值。
隶属度函数的定义为:模糊集合中,某个元素属于该模糊集合的程度大小,可用μA(x)表示[13]。其中:μ代表隶属度函数,A代表模糊集合,x代表模糊集合中的某个元素。
由于本文涉及的威胁评估节点的相对速度和相对距离均为三分类的类别归属问题,因此可采用相同的隶属度函数模型:当数值较小时,采用z型隶属度函数;当数值较大时,采用s型隶属度函数;数值取中间时,利用减去其余2种隶属度的方法进行隶属度计算。模糊集合中各类型的隶属度计算表达式如下:
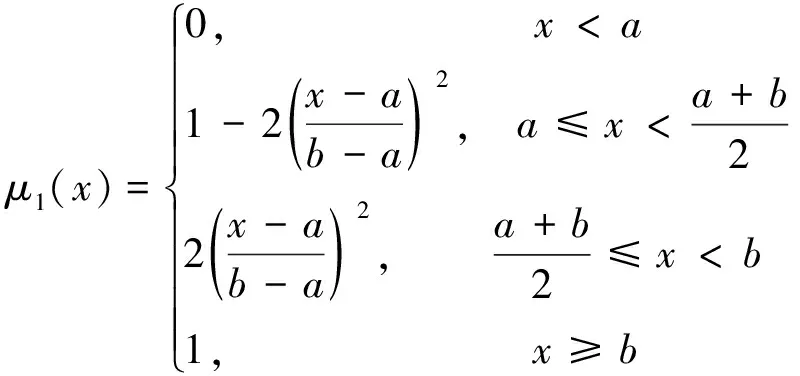
(5)

(6)

(7)
在此基础上,相对距离和相对速度的隶属度函数对应参数a,b,c和d的取值情况如表2所示。
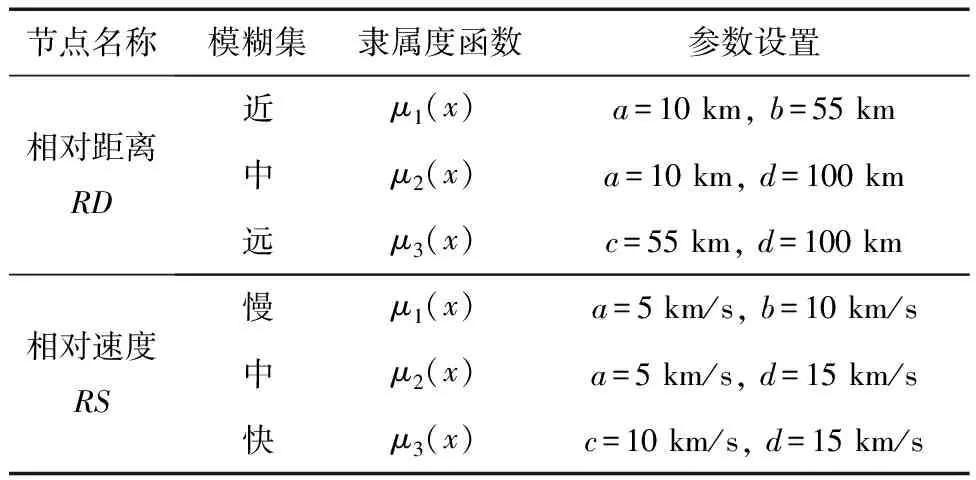
表2 节点隶属度函数参数取值表
在此情况下,对于相对速度和相对距离的隶属度关系如图2~3所示。

图2 相对距离隶属度函数

图3 相对速度隶属度函数
3 空间目标威胁评估模型构建
空间目标的威胁度主要由动态威胁度、静态威胁度和预警信息决定,其中:影响预警信息的主要因素包括历史是否有扰动行为、是否存在形态异常等;影响动态威胁度的主要因素包括相对距离、相对速度和轨道阶段;影响静态威胁度的主要因素包括目标类型与探测条件,探测条件中主要包括相对距离、光照条件和载荷工作状态等影响因素。
在构建贝叶斯网络前,首先分析威胁评估的数据处理过程,获得的原始数据包括各类传感器获得的数据信息,以及在空间编目列表中可能会获取到的目标是否进行过扰动行为、空间目标类型等先验数据。在此基础上对数据进行预处理,计算相对位置、速度关系等信息,利用图像分割等技术提取形态异常特征、利用长短期记忆网络等时序序列处理方法计算空间目标所处轨道阶段,识别轨道阶段等节点取值的推算工作。之后,将预处理阶段获得的所有贝叶斯网络节点信息送入网络,其中离散变量被直接送入网络,连续变量根据隶属度函数离散化计算类别隶属度后送入网络。最后,通过贝叶斯网络中先验概率及条件转移概率等进行推理分析,融合多源信息,最终获得对于空间目标威胁程度的综合评估。威胁评估模型的数据处理过程如图4所示。
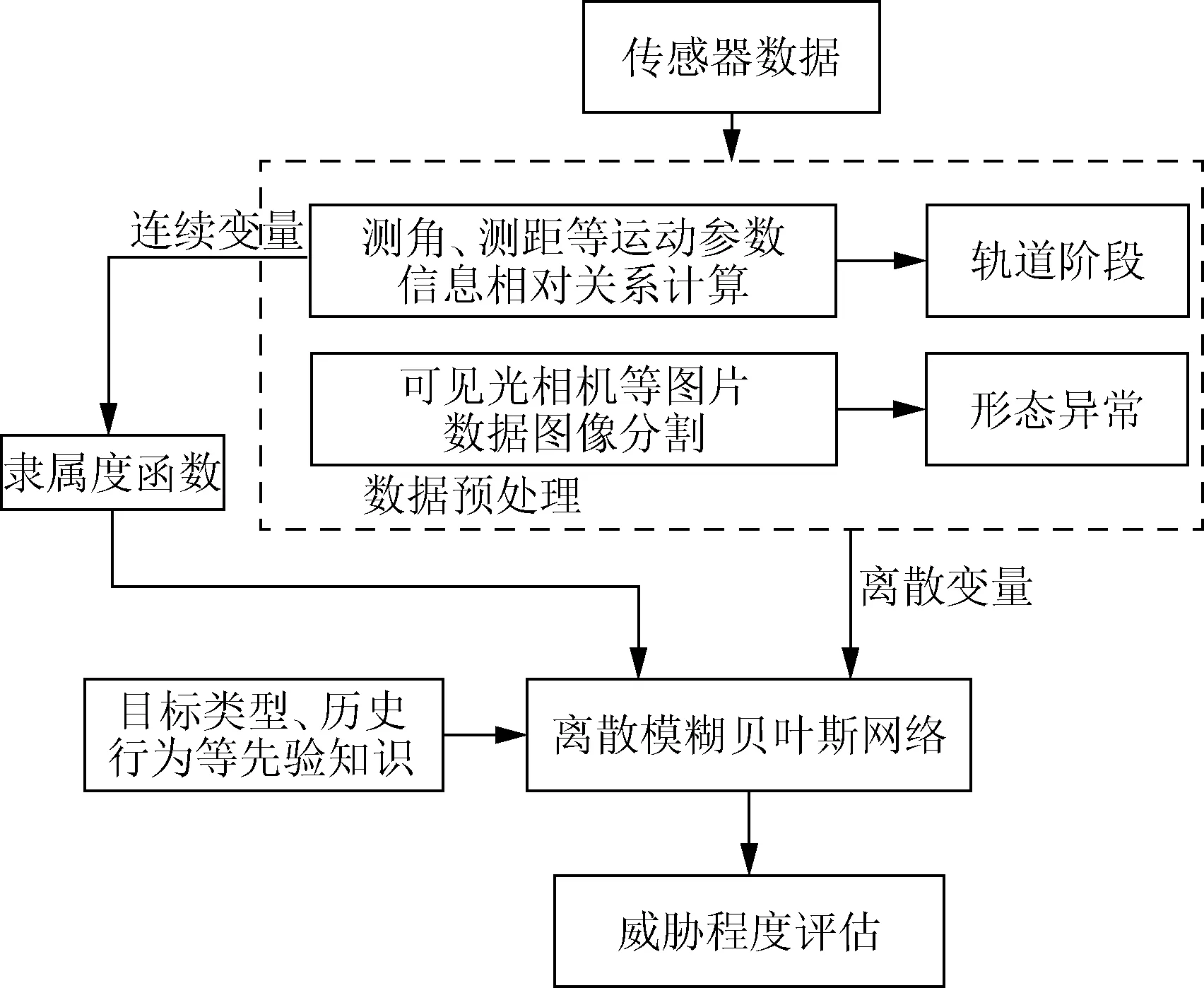
图4 空间目标异动行为威胁估计数据处理过程
在数据流图基础上,分析2.1节中威胁评估影响因素之间的依赖关系,构建模糊离散贝叶斯网络模型(图5)。在网络结构确定后,需要设置贝叶斯网络中的参数,主要包括节点先验概率和节点间的条件概率。先验概率代表依据历史数据,节点所属各类别的出现概率。在本文中,若无父节点的节点未观测到数据时,利用该节点的先验概率进行推理计算。条件概率表是贝叶斯网络中的必要基础数据,代表节点间依赖关系的强弱。在确定网络结构的基础上,给定条件概率表可以通过已观测的节点推理未观测的节点。条件概率表的获取方式主要有根据先验数据学习得到相关参数或通过咨询领域专家给出相关数据的方式。本文依据专家知识给出各节点的条件概率表。

图5 基于贝叶斯网络的空间目标异动威胁估计框架
告警信息作为威胁判断中重要影响因素,可以反映空间目标的异常特征。告警级别的高低由历史上有无扰动和形态是否有异常决定,是一种典型的同父结构,条件概率表如表3所示。
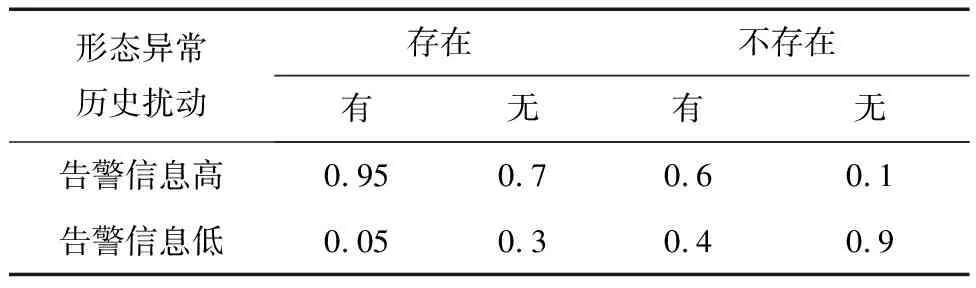
表3 告警信息条件概率表
动态威胁反映的是动态指标对乙方航天器威胁情况,其取值的大小由相对速度、相对距离和轨道异常预测的节点决定,是一种同父结构,动态威胁的条件概率如表4~6所示。

表4 动态威胁条件概率表(相对速度快时)

表5 动态威胁条件概率表(相对速度中时)

表6 动态威胁条件概率表(相对速度慢时)
探测条件反映的是当前状态下已方航天器具备的探知威胁能力受到相对距离、光照条件和载荷工作条件的影响,状态概率如表7所示。

表7 探测条件条件概率表
静态威胁反映的是静态信息对空间目标的威胁程度。在得到探测条件状态概率表的基础上,静态威胁级别的高低由目标类型和探测条件共同决定。静态威胁级别的条件概率如表8所示。

表8 静态威胁条件概率表
在此基础上可推理得到空间目标的整体威胁程度,该指标由告警信息、动态威胁和静态威胁共同决定。空间目标的威胁程度条件概率如表9所示。

表9 空间目标综合威胁程度估计条件概率表
4 仿真校验
4.1 场景设定
4.1.1 场景一——抵近绕飞
该场景共设置20个时间步(第0~19步)。在该场景下,空间目标首先由轨道保持状态(第0步至第1步)转为轨道接近状态(第2~8步),而后抵达已方航天器周围时再次机动变为自然绕飞状态(第9~16步),最后变为飞离状态(第17~19步)。假设该航天器历史无扰动行为,绕飞轨道前无形态异常特征,绕飞后存在异常特征(第10~15步)。载荷工作状态在各时间步均为良好。光照条件在轨道绕飞阶段存在较差的情况(第12~15步),其余时间步均为良好。该空间目标类型为军用卫星。
4.1.2 场景二——碰撞
该场景共设置24个时间步(第0~23步)。在该场景下,空间目标与已方航天器之间的相对距离逐渐减小,最终发生碰撞时相对距离变为0。假设初始状态下航天器之间的相对距离为100 km。空间目标的光照条件和载荷工作状态全程保持良好,起始阶段轨道为保持阶段(第0~2步),后续为抵近阶段(第3~23步)。该空间目标类型为军用卫星。
4.2 实验结果分析
场景一相对距离、速度、静态和动态威胁节点属性隶属度随时间步的变化情况如图6~9所示。

图6 场景一相对距离节点隶属度变化趋势

图7 场景一相对速度节点隶属度变化趋势

图8 场景一静态威胁节点隶属度变化趋势

图9 场景一动态威胁节点隶属度变化趋势
由场景一节点隶属度变化趋势可以看出:第2步时由于轨道特征发生转变、相对距离较第1步缩短,“动态威胁高”的隶属度从0.3上升至0.7496,同时,相对距离的缩小有助于已方航天器载荷探测威胁,静态威胁呈现缓慢下降的趋势。到第9步轨道变为绕飞状态时,由于进入到“相对距离近”的区间,因此相对距离不再对动态威胁节点产生额外影响,但由于相对速度减小到“相对速度慢”的区间,因此动态威胁特征有小幅度下降。第10步由于检测到形态异常特征,因此“告警信息高”隶属度从0.1上升至0.6。由于绕飞过程中存在阴影区的问题,光照条件出现短暂“光照条件不好”的属性,很大程度上影响了静态威胁的评估,第12步“静态威胁高”隶属度从0.41上升至0.48。最后一个阶段,由于空间目标的轨道特征转变为飞离状态,同时相对速度和相对距离均随时间增长而增大,因此动态、静态威胁均有不同程度的下降。在场景一条件下,空间非合作目标异动行为威胁估计隶属度变化趋势如图10所示。

图10 场景一威胁程度隶属度变化趋势
从图10可以看出,威胁程度随空间目标进行的动作在不同时间步呈现较大变化。空间目标由轨道保持状态变为轨道抵近状态时,“威胁度高”隶属度从0.3941变为0.6225,较好地反映了这一改变对已方航天器威胁增长的情况。在第2~8步,随着相对距离的不断缩小,威胁程度也在不断增长。第9步时,由于机动后进入对已方航天器的绕飞轨道,暂时避免直接碰撞,相对速度、相对距离均由最小的隶属度表示,不再产生更多影响因素,因此威胁程度出现短暂下降。但第10步空间目标开始绕飞后,目标开展侦察等威胁动作,使得形态处于异常状态,导致“威胁度高”隶属度从0.6438提升到0.7821。第11步开始目标进入阴影区,光照条件恶化导致难以持续对非合作目标跟踪观测,威胁程度进一步上升,“威胁度高”隶属度达到最高0.7956。从第16步结束阴影区和异常形态开始,威胁程度持续下降,并随着空间目标的飞离,威胁程度明显下降。从场景一各个时间步的威胁程度看,本文采用的离散模糊贝叶斯网络威胁评估模型能较好地反映不同时段、空间目标不同状态下的威胁程度,具备实际应用价值。
场景二相对距离、探测条件和动态威胁属性隶属度随时间步的变化趋势如图11~13所示。

图11 场景二相对距离节点隶属度变化趋势

图12 场景二探测条件节点隶属度变化趋势

图13 场景二动态威胁节点隶属度变化趋势
由场景一节点隶属度变化趋势可以看出:相对距离隶属度随着空间非合作目标距离的不断缩短,模糊集合“近”的隶属度也逐渐增大,最终“相对距离近”的隶属度变为1。相对距离影响探测条件节点,因与空间目标的距离缩短、载荷工作条件良好,因此“探测条件好”的隶属度呈逐渐增大的趋势。由于在本场景下目标类型已确定,因此静态威胁条件的动态变化只与探测条件相关,并且探测条件的变化趋势较缓使得静态威胁程度并没有随着距离缩短而产生太大影响。相比之下,相对距离直接影响动态威胁节点的取值,由于第3步探测到轨道阶段发生异常,“动态威胁高”的隶属度直接从0.3变为0.7516,提高了150%。从第3步起,轨道阶段和相对速度(本场景中相对速度设定为“中”)均保持不变,隶属度的变化完全取决于相对距离的变化,而相对距离的逐渐缩短也使得“动态威胁高”的隶属度从0.7516不断上升,在相撞前达到最高值0.88。在场景二条件下,空间非合作目标异动行为威胁估计隶属度变化趋势如图14所示。

图14 场景二威胁程度隶属度变化趋势
从图中可以看出,空间目标异动行为威胁程度随着相对距离的不断缩短而逐渐增大。场景二第0步的威胁程度模糊表达为[0.3120,0.1898,0.4982];第3步时,随着空间目标轨道阶段由轨道保持状态变为抵近状态,空间目标的威胁度模糊集合变为[0.5523,0.1838,0.2639],其中“威胁程度高”的隶属度从0.31提升至0.55,较大程度上反映出该目标行为的威胁程度。同时,在第3步到第23步的过程中,“威胁程度高”的隶属度不断提高,“威胁程度中”的变化较小,“威胁程度低”的隶属度不断降低。最终,在第23步时,威胁程度的模糊集合为[0.6192,0.1823,0.1985]。在整个抵近碰撞过程中,面对空间非合作目标的突发异动行为,威胁程度指标能够及时展现异常变化,可为威胁规避决策提供重要预警信号。同时,在空间目标逐渐接近的过程中,指标表现稳健,变化趋势符合专家认知的威胁趋势,可以较好地反映空间目标异动行为的威胁情况。
5 结论
提出了一种基于离散模糊贝叶斯网络的空间目标威胁评估模型,并对抵近绕飞和碰撞2种典型空间威胁场景进行仿真。实验结果表明,该模型在2种场景下对空间目标的威胁度刻画准确,能反映不同时间状态的目标实时威胁程度,可以为后续轨道威胁规避决策提供数据支撑,具有较强的实际意义。
