基于动态轮廓曲线的运动图像特征识别研究
2023-09-04程彭阳子,刘萍
1 引言
随着图像处理技术的不断应用与发展,运动图像的特征识别与轮廓精准提取在军事侦察、体育运动等领域得到充分的重视[1-3]。运动图像因复杂环境与目标自身运动的原因,会导致图像的轮廓特征模糊和曲线特征不均等一系列问题[4]。针对运动图像的特征识别,研究者提出大量的检测方法,如图像数据法和图像局部能量分析法等,然而这些方法没有对运动图像的轮廓曲线进行区分,从应用效果来看,运动图像的特征识别与轮廓检测依旧属于开放性课题,在不同的应用场景中,遇到了诸多困难,因此吸引了不少研究学者,一直有新的方法被提出来。
文献[5]通过分析图像的轮廓特征,采用最大类间方差模糊约束得出图像的隶属度函数,并计算出运动目标的多个阈值,利用阈值求解出图像轮廓内离中心点最近的两个轮廓点中心值,通过曲率角度求出的曲率符号对图像轮廓特征进行提取,该方法对图像特征提取的误差率较低,提取精度较高。文献[6]对运动图像中的尺度不变特性进行预处理,得到运动目标的特征提取图,为了保证特征序列的连续性,设计了序列概率图模型,并采用序列影像轮廓提取法对建立的运动目标外观模型进行轮廓线的提取,该方法对运动图像的轮廓提取精度较高,鲁棒性较好。文献[7]通过三维动态跟踪识别法对运动图像的特征进行提取,结合AR虚拟技术分割运动图像的轮廓,并绘制出运动目标特征的灰度直方图,采用Harris检测方法对运动目标的实时动作进行捕捉,完成运动目标的三维虚拟重构成像操作,该方法对运动图像的识别能力较强,检测性能较高。
基于以上研究,本文提出基于动态轮廓曲线的运动图像特征识别方法。将运动目标的边缘分为背景边缘和轮廓边缘,通过抑制强度对背景边缘起到抑制的作用。根据本文对运动图像跟踪识别系统的设计,完成运动图像的跟踪识别与修复功能。
2 图像背景抑制
对运动图像进行特征识别时,需要对图像轮廓的候选边缘进行处理,得出图像的轮廓边缘。传统方法无法对图像的细小边缘进行处理,大大降低了轮廓提取的准确性。基于图像视觉特征,本文将边缘分为背景边缘和轮廓边缘,提高分类识别的概率,增强轮廓提取的性能。图像的方向选择权重函数可表示为
Δ(x,y,x-α,y-β)=
|cos(φ(x,y)-φ(x-α,y-β))|
(1)
其中,(x,y)表示当前图像点;(α,β)表示当前点的偏移量;φ表示梯度方向角。若当前点与偏移量间的夹角为零,表示方向选择权重值最大;若当前点与偏移量间相互垂直,表示方向选择权重值最小。对于任何一个图像点,均可量化为邻域点的梯度幅值加权和,那么背景抑制量可表示为

(2)
其中,Agra(x-α,y-β)表示背景抑制点的梯度幅值;Ψ表示偏移量所有点的集合。图像当前点外梯度幅值经过背景抑制后的响应公式可表示为
Brep(x,y)=Erep(Agra(x,y)-γ(x,y)))
(3)
其中,γ表示背景的抑制强度,起到对背景纹理的抑制与运动图像轮廓边缘保留的作用。当γ被设置为较大值时,在加强抑制背景纹理边缘的同时,也会对运动图像轮廓的边缘产生抑制;反之,当γ被设置为较小值时,在加强运动图像轮廓边缘保留的同时,也会残留大量的背景纹理边缘。因此采用不同大小的抑制强度值对图像进行处理。定义图像点(x,y)的候选轮廓集为ocan(η,λk),那么候选轮廓集的交集和并集可表示为
(4)
其中,交集Oa,i中包含了很多不连续的轮廓片段;并集Oa,j中包含了完整的纹理边缘和轮廓。为了筛选出运动图像完整的轮廓边缘,并能剔除掉背景的纹理边缘,将历遍并集中所有的边缘。若有重叠的像素点,则将其加入组合中,结果可表示为

(5)
通过组合结果,在保留运动图像完整的轮廓边缘时,剔除背景纹理边缘,大大提高了图像正确分类的概率。
3 运动图像系统设计
为了实现对运动图像的快速跟踪,提高对运行图像信息的识别能力,需要对运动图像的跟踪识别系统进行设计。系统结构模型如图1所示。

图1 运动图像系统结构模型
依据运动图像的系统结构模型,可将运动图像的运动参量主要划分为水平、纵向、缩放和旋转等运动。通过对运动图像像素点的提取与修复,完成对运动图像的跟踪识别。
3.1 提取图像轮廓像素点
假设原始运动图像为二值图像,用公式可表示为

(6)


(7)
对图像的单帧角点进行匹配,得出角点(x,y)的亚像素坐标,进一步通过灰度筛选处理,得出图像关键帧的输出特征向量,公式可表示为
(8)
其中,D(·)表示图像角点的轨迹;δ(n)表示小波分解尺度。采用B样条曲线在动态模型中表示出图像的平面轮廓,公式可表示为

(9)
其中,E(u)=[E0(u),E1(u),…,Eq-1(u)]T,且Ei(u)(0≤i≤l-1)。Ei(u)表示第i个B样条曲线基函数;l表示B样条曲线基函数的数量;Gx(v)和Gy(v)分别表示图像控制点在x轴和y轴的坐标。
以Lagrangian动力学原理为基础,建立图像动态轮廓线关于物理学部分的动力学方程,公式可表示为
H0+2K+LG=O
(10)
其中,H0表示物理学部分的质量矩阵;K表示物理学部分的阻尼矩阵;L和O分别表示刚度矩阵和外荷载向量。
3.2 轮廓线的迭代收敛
以Newmark迭代算法为基础,对预处理后的运动图像轮廓像素点进行提取,算法主要分为两步:
1.计算初值
1)根据建立的动力学方程,计算出质量矩阵、阻尼矩阵和刚度矩阵、和:M=H0、N=2K、P=L。
3)设置运动图像的时间步长Δt、像素坐标x和y,获得积分常数(k0,k1,…,k7)。
4)求出最终的刚度矩阵:L=L+g0M+g1N。
2.迭代运算
1)当时间为t+Δt时,计算出图像的有效荷载:
Qt+Δt=Qt+Δt+M(g0Gt+g2Gt+g3t)+
N(g1Gt+g4Gt+g5t)
2)当时间为t+Δt时,计算出图像的位移:
LGt+Δt=Qt+Δt
3)当时间为t+Δt时,计算出图像的速度:
t+Δt=g0(Gt+Δt-Gt)-g2Gt-g3t
4)当时间为t+Δt时,计算出图像的加速度:
Gt+Δt=Gt+g7t+Δt+g6t
对分割后的初始目标轮廓进行B样条曲线拟合处理,实现运动图像轮廓像素点的有效提取。
3.3 图像修复优化处理
提取运动图像轮廓像素点后,利用修复优化算法对图像的像素点进行修复。首先通过拓扑梯度最小重构路径耦合修复方法对运动图像损坏区域进行识别。然后通过拓扑梯度方法确定运动图像的拓扑梯度以及轮廓修复的关键点。最后通过像素关键点构成修复区域的连续轮廓,求出最小轮廓路径。
设图像的损坏区域为Jare,损坏区域的边界为hbou,输入的运动图像为pima,运动图像待修复区域的轮廓为hd和hn。那么运动图像的拓扑梯度公式可表示为
I(x,m)=-[(∇hd(x)·m)(∇sd(x)·m)]+
[(∇hn(x)·m)(∇sn(x)·m)]
(11)
其中,sd和sn分别表示相邻像素点的状态;∇表示梯度运算;m表示特征向量。将式(6)进行转化,可表示为
I(x,m)=mTR(x)m
(12)
其中,R(x)表示对称矩阵,拓扑梯度值在对称矩阵与特征向量为相关矢量时取得最小值。通过像素点状态的获取,可以求出图像损坏区域的对称矩阵及最小特征值。选择峰值信噪比对修复优化后的图像质量进行评估,运动图像修复优化的反馈机制用公式可表示为
(13)

4 仿真结果分析
为了验证基于动态轮廓曲线的运动图像特征识别方法的跟踪识别性能,同时对系统的可靠性进行验证,首先选择Nikon D7200采集设备完成运动图像的采集工作,测试选取不同权重值(0.1~0.9)时以及不同背景抑制强度(0~4)时对算法性能的影响。算法平均检测性能的仿真结果如图2所示。
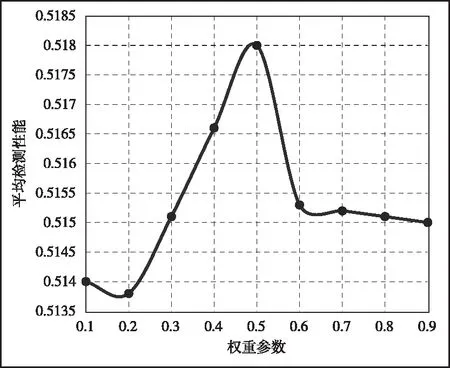
图2 不同权重值下的性能结果
从图中可以看出,当权重取值为0.5时,本文算法对运动图像特征识别的性能达到最优状态。在算法参数设置中,将权重设置为最优值0.5,验证背景抑制强度对运动图像平均检测性能的影响,仿真结果如图3所示。

图3 不同抑制强度下的性能结果
从图中可以看出,当抑制强度取值较小时,由于无法有效的对运动图像背景纹理进行抑制,导致算法的性能较低;当抑制强度大于2时,由于对运动图像的轮廓边缘加强了抑制作用,使算法是去了局部性,因此导致图像的平均检测性能降低,通过仿真可以得出抑制强度最优值的大小为2。
其次选取600个视频片段,包含动漫、体育等多种类,并从中随机选择10个运动图像关键帧的采样点,以运动图像帧匹配度作为测试指标,并采用文献[5]、文献[6]以及文献[7]中所提方法作为比较,最终结果如图4所示。
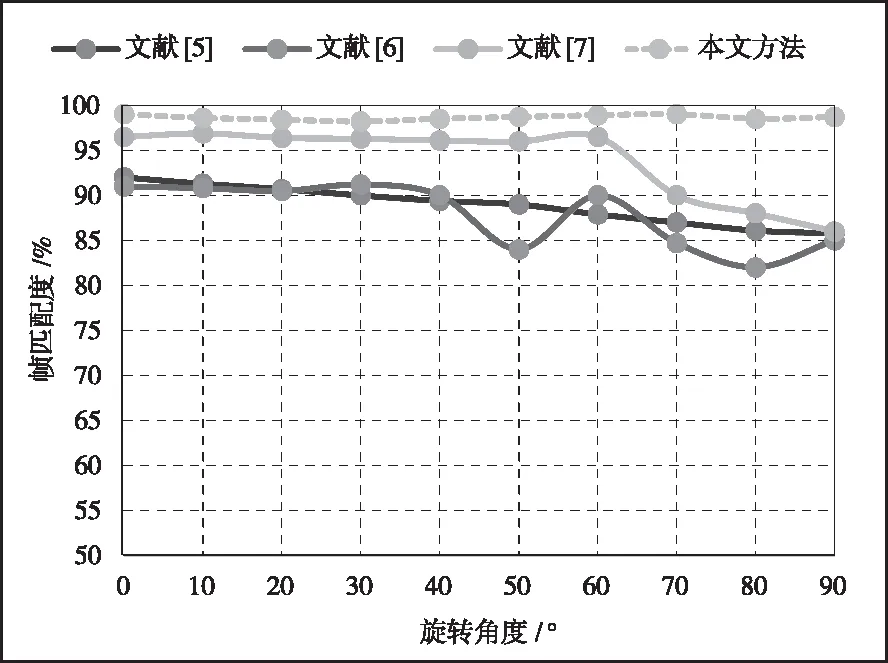
图4 图像帧匹配度对比结果
从图中可以看出,采用文献[5]方法随着运动目标在转动的过程中,图像帧的匹配度逐渐降低;文献[6]方法在运动目标旋转角度小于40度时,图像帧的匹配度维持在稳定状态,之后该方法不稳定,出现抖动;文献[7]方法在运动目标旋转角度小于60度前,图像帧的匹配度较高,但之后匹配度较低;而采用本文方法对运动图像帧进行跟踪,帧的匹配度较高,处于稳定状态,因此本文方法不仅可以提高运算效率,还可以对图像帧进行准确的跟踪,跟踪性能良好。
为了进一步评估本文方法对运动图像的修复性能,对随机选择10幅图像轮廓像素点的修复数量、信噪比和峰值信噪比进行仿真测试,同样采用文献[5]、文献[6]以及文献[7]中所提方法作为比较,表1与表2描述了各方法的数据结果。
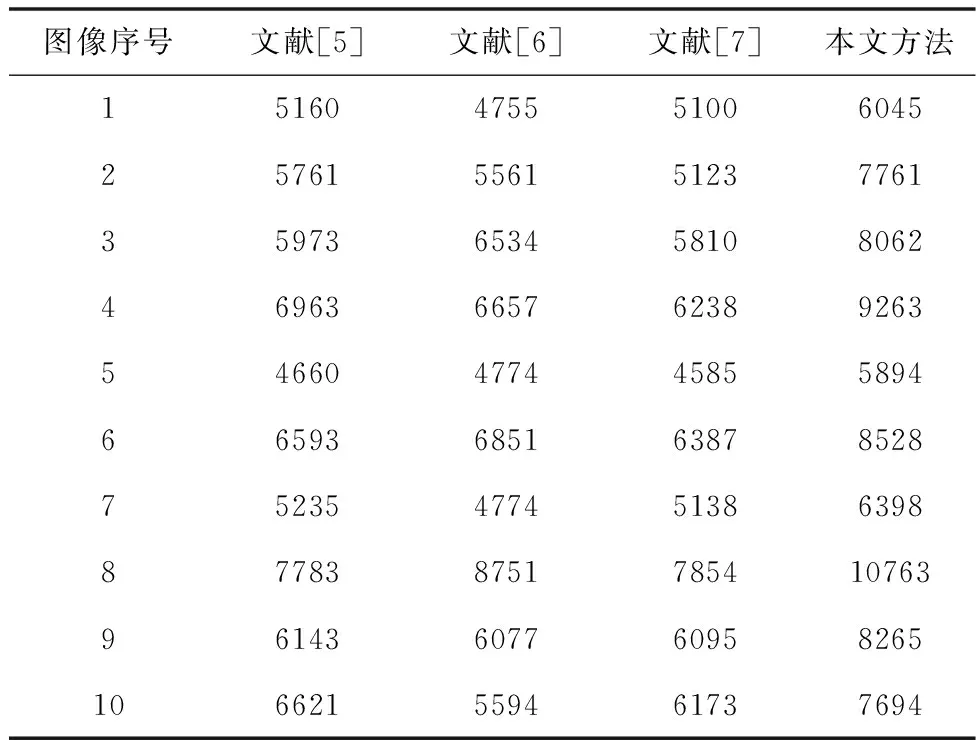
表1 修复点数量对比结果

表2 峰值信噪比对比结果
从表1中可以看出,采用本文方法对运行图像进行修复,图像轮廓像素点的修复数量明显比其它三种方法多,表明本文方法修复图像的轮廓区域较大,修复效果优越。从表2中可以看出,采用本文方法,运动图像轮廓像素点的峰值信噪比均高于50dB,说明对图像的修复质量更高。验证了本文方法能够在较大程度上对图像的细节进行修复,且修复性能较好。
5 结束语
为了提高对运动图像的识别能力,提出一种基于动态轮廓曲线的运动图像特征识别方法。通过图像的方向选择权重函数确定权重值,并通过对背景抑制强度值的设定,抑制背景纹理与保留运动图像轮廓边缘。通过角点检测和图像动态轮廓线的动力学方程对图像像素点进行跟踪。同时引入修复优化算法对运动图像的轮廓损坏区域进行自动识别,根据峰值信噪比对图像修复的效果进行评估。为了验证本文方法对运动图像特征的跟踪识别性能,选择Nikon D7200采集设备完成运动图像的采集工作,通过仿真选择出最优的权重值和背抑制强度值。实验结果表明,本文方法可以对图像帧进行准确的跟踪与识别,而且能够在较大程度上对图像的细节进行修复,且具有较好的修复性能。