ICESat-2与多源光学影像的潮滩地形反演方法
2023-09-04王子赫康彦彦王敏京
王子赫,康彦彦,王敏京
(1. 河海大学海洋学院,江苏 南京 210098; 2. 自然资源部华东海岸带野外科学观测研究站,江苏 南京 210007)
潮滩是由潮间带淤泥带部分与海底浅滩共同形成的沿海特殊地形,是海岸带的重要组成部分,受潮汐的作用,高潮时被水淹没,低潮时露出水面或变浅[1]。作为海陆相互作用的前沿地带,近岸潮滩在海岸灾害防护、土地资源利用及保护海洋生态环境等方面发挥着重要作用;但受风浪、潮流、风暴潮等因素的影响,其位置、形状等不断变化,这对沿海地形的监测与更新提出了较高要求,因此对高精度潮滩地形反演方法的研究具有重要意义[2]。
考虑到潮滩普遍恶劣的自然环境,大规模的人工跑滩现场测量存在极大危险性和困难性,需要消耗大量人力物力[3]。而遥感测量技术凭借其时效性强、覆盖范围广、经济耗费少等优势,受到大量学者的关注。InSAR与LiDAR技术的发展对于提取潮滩敏感地形信息、描述潮滩的形态特征具有很大潜力[4-5]。但受潮滩沉积物和残留水体的影响,辐射信号受阻减弱,精度受限。同时InSAR技术的研究机理复杂、数据处理难度较大,很少被应用于实际的潮滩反演处理中[6]。虽然机载LiDAR技术的效率和精度都可以保证,但其受自然因素影响会产生数据缺失,同时获取数据成本过高,对于中等精度高频次大面积、连续、长期的更新监测并不经济可行。
在众多遥感监测方法中,水边线法以其适应性强、成本低及支持历史地形构建等优势,成为目前潮滩地形监测最具操作性的方法[7-8]。文献[9]将水边线视作等高线,利用多潮位赋值生成潮滩DEM模型。文献[10]通过潮位测站基线计算水边线高度值,构建了江苏沿海辐射沙脊群DEM。文献[11]利用二维水动力潮汐数值模型,模拟水边线瞬时潮位,将高度值赋值于水线对应点,建立了江苏沿海大面积潮滩历史地形反演。水边线法依托于潮位资料,赋值精度难以保证,同时在提取水边线时存在必然的时间跨度,因此水边线法反演地形存在局部区域差异。
2018年9月ICESat-2(ice,cloud and land elevation Satellite-2)激光卫星成功发射,为潮滩地形构建带来新的技术手段。该卫星配备了高分辨率高级地形激光高度计系统(ATLAS),用于测量地球表面高程[12]。文献[13]利用ICESat-2点云数据提高了航天飞机雷达地形任务(SRTM)高程产品衍生DEM的精度。文献[14]通过构建ICESat-2高度数据与研究区域的淹没频率关系模型,获得潮滩地形。但同一淹没频率下的实际高度同样存在误差,且使用遥感影像的时间跨度会更长,仅根据淹没频率很难反演真实的潮滩地形情况。
本文通过提取ICESat-2激光点云剖面数据高度值,结合多源光学影像与潮位进行反距离权重插值,提高水边线赋值精度,得到一种新的潮滩地形反演方法,并与传统水边法DEM进行对比分析。
1 研究区与数据
1.1 研究区概况
选择江苏岸外辐射沙脊群南侧水域的两处大型沙洲——条子泥与高泥为研究对象。条子泥位于辐射沙脊群的中心地带,东起东大港,西侧与高泥相邻,宽度约100 km,面积分别约为504.9、350 km2(如图1所示)。受西大港、东大港、条鱼港潮波系统及黄沙洋水域的共同作用,该区域泥沙交换活跃,潮滩地貌复杂多变,最大潮差超过9 m,具有辐射沙脊群水域最宽阔的潮面,滩面宽约14 km[15]。潮滩系统十分脆弱,其形态和动力地貌过程极易受人类活动的影响[16]。条子泥垦区一期建设总面积为6 095.62 hm2,大规模围填海活动后,条子泥及其毗邻近岸沉积动力环境的均衡态被打破,新的地貌格局逐渐形成[17]。
1.2 数据及预处理
研究初期收集2021年下半年的42组卫星数据,主要包括Landsat 8、GF-1、GF-6、HJ-1A卫星,经筛选获取了10景清晰且含云量低于40%的光学图像,其空间分辨率、幅宽等参数为适合水边线法的应用,见表1。
本文使用的激光点云剖面数据是由ICESat-2卫星搭载的ATLAS测高系统探测所得的。ATLAS是一套非扫描推帚式、高重频、微脉冲、光子计数式激光测高系统。其沿轨道有3束激光束,相邻光束之间的交叉轨道距离为3.3 km。每束激光被分为2个子束(两子束激光距离较近,为90 m),其中一子束激光脉冲能量较强,约是较弱子束的4倍。地面探测波束结构如图2所示,6束激光沿飞行方向同时向地面进行推扫[18]。
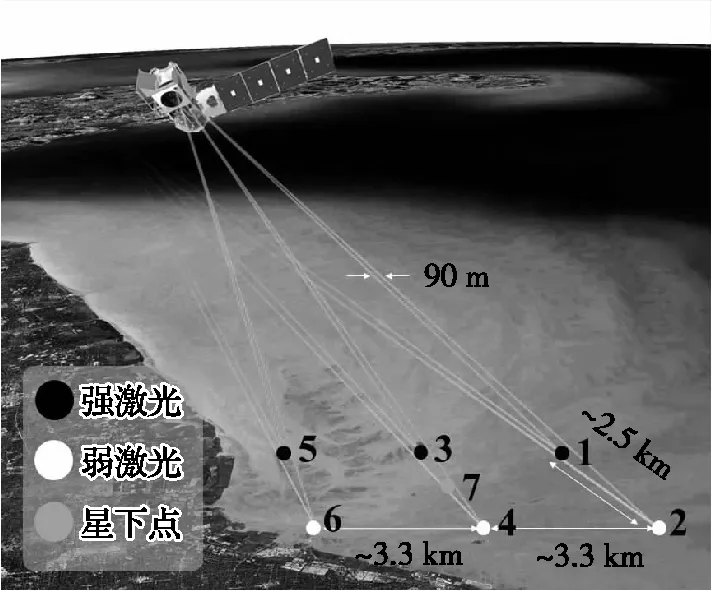
图2 ICESat-2卫星工作示意
激光点云高度数据采用NSIDC提供的ICESat-2二级产品——全球地理定位光子数据(ATL03),选取2021-07-09与2021-12-18两组共12条激光轨道数据(如图1所示)。其中黑色实线为2021-07-09轨道,由左至右分别为gt3r、gt3l、gt2r、gt2l、gt1r、gt1l的轨道;白色实线为2021-12-18轨道,由于ICESat-2在航行一段时间后会颠倒航线方向,因此该航道顺序相反。原则上,在对数据进行筛选构建模型时,应选取轨道覆盖潮滩面更为广泛、能够与水边线产生更多交叉点,且激光脉冲能量较强的数据。因此选取2021-07-09中gt1l与2021-12-18中gt3r的高度值数据用于验证,其余轨道数据用于构建DEM模型。
图1中分别标注了东大港(DDG)、新条鱼港(TYG)、洋口港(YKG)、大丰港(DFG)、东沙港(DSG)5处围绕整个江苏近海范围的潮汐观测站,能够提供2021全年潮位数据。靠岸一侧为GPS RTK测量仪探测到的2021年10月的2组断面实测高度数据,每组数据按照约20 m的渐进步长获取高度值,用于DEM模型的验证。
2 研究方法
2.1 ICESat-2断面数据处理
根据强光波束对不同表面散射回光束的能量参数值的不同,ATL03产品将目标地物分类为陆冰、海冰、海洋、陆地、内陆水。产品根据每一光子事件的置信度值,将光子分为可能的信号光子点或背景光子点,通过信噪比与阈值的关系对光子事件进行归类,以0、1、2、3、4为编号,分别对应噪声、占位,以及低、中、高的置信度信号[12]。在进一步去噪前,选取高置信度信号(编号4)中被分类为陆地的信号光子事件,剔除其余光子事件,完成初步降噪,对应图3中的降噪过程。
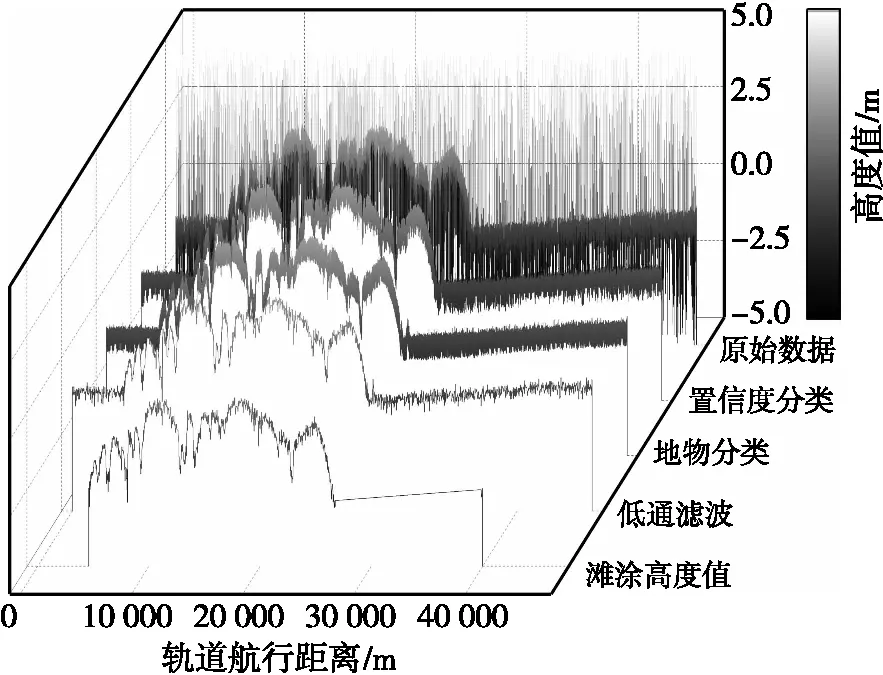
图3 激光点云高度值提取过程
采用低通滤波窗口对其余光子点云剖面进行迭代运算。滤波降噪的主要思想是将信号中特定波段频率滤除,是抑制和防止干扰的一项重要措施。本文采用的低通滤波能够通过动态变化的方式改变频率数值,且能够适应不断变化的潮滩地形高度,从而对激光点云数据进行降噪处理。其平滑与降噪的效果主要取决于截止频率的设定,即
Wc=2·fc/fs
(1)
式中,Wc为3 dB截止频率;fc为边界频率;fs为采样频率。去除背景噪声后,激光点云剖面数据获得最大限度的平滑,高度剖面线起伏变化位置周边的噪声得到削弱。对应图3中的第4条降噪结果。
获得最终潮滩高度数据前,需注意两点:
(1)考虑到选取的光学影像分辨率为30 m,并以此基准提取水边线数据,为简化数值计算过程、方便处理数据;同时,为反映真实的地面高度情况,将滤波后的激光点云数据根据卫星航行的距离(即光子事件间隔),选取每隔30 m范围内的光子事件为一组,提取每组数据中的高度中值,作为该区域的地形高度值。
(2)ATLAS后向散射的绿色激光束对清澈的Ⅰ类水体具有良好的穿透性,但对于辐射沙脊群水域浑浊的Ⅱ类水体,透射率极低,因此激光卫星仅能获取条子泥地区陆地与海表面的高度信息。而条子泥水域受潮汐作用的影响,海表面信息在不断变化,本文选取的两组ICESat-2卫星过境轨道数据获取时刻的潮位值均略高于该时间范围的最低水位。因此去除多余的水平面数据,获得潮滩断面的高度值。如图3中最后获得的潮滩地形高度数据。
2.2 批量获取光学影像水边线图像数据
采用最大似然监督分类方法对光学影像进行批量提取。提取前首先将光学遥感影像进行必要的预处理,包括辐射定标、大气校正、几何校正等。由于创建样本时,同一类地物选择过多将导致分类精度下降,因此应尽量选择特征明显的区域,如图4(a)所示,将影像分为潮滩、水体两类地物且作为训练数据。使用最大似然法监督分类选用多个波段对图像进行分类,再经滤波、聚类分析等分类后处理操作,得到图4(b)。图中高浊度悬沙或浅滩表层残留水体等复杂地物,需结合潮汐、泥沙运动等因素,目视解译对影像进行修改,提取影像中的水边线数据,结果如图4(c)所示。白色边缘线即为水边线,线条连续清晰,能够较好地展现影像拍摄时刻下潮滩的整体形态。采用提取的潮滩地形高度数据与序列水边线在二维平面上进行叠加,产生多处交叉点,如图4(d)所示。

图4 最大似然法监督分类批量水边线提取
2.3 构建潮滩DEM模型
考虑到水边线与激光剖面轨道的交点集中于激光卫星轨道一侧,其位置和数值均与距离较远的潮位值存在一定差距。因此选用反距离权重(IDW)的方式构建海面并高度对水边线进行赋值。该方法对于距预测位置最近的测量值对预测值的影响将会更大。假定每个测量点都存在局部影响,而这一影响会随着距离的增大而减小[19]。
将图像采集时刻对应的潮位与高度交点数据进行IDW计算,得到覆盖整个研究区域范围的栅格高度插值数据,将结果赋值于对应水边线中。为进一步提高模型精度,选取地形高度值中较为显著的极值点与水边线共同参与插值,这些点未能与水边线相交,但能够展现潮滩地形的部分细节,作为补充修正。利用自然邻域插值法获得条子泥和高泥 2021年下半年的DEM。
本文使用的ICESat-2数据,捕捉滩面的高度值范围为-3~2 m。受潮汐水位的制约,选取最低潮位以上部分为掩膜兴趣区,提取该部分DEM后进行分析。
3 结果分析与讨论
将预留的两条轨道用于验证模型的效果,RMSE分别为0.27、0.29 m。由此可知,IDW算法将潮滩地形高度值与潮汐水位值进行插值,获得较准确的栅格高度值,模型与ICESat-2地形高度数据结合度较好,轨道处的细节得到了很好的展现。
图5分别为传统的潮位赋值水边线法与本文基于ICESat-2高度值优化的DEM模型。对比两种DEM模型可知,优化后的DEM模型展示了条子泥内部更多的地形变化,深色部分主要集中于靠近江苏近岸一侧和沙洲系统的中心位置,浅色部分集中于沙洲系统边缘的较低水位区域;经过地形高度数值优化后的模型能够较好地识别出复杂多变的潮流、潮沟结构。
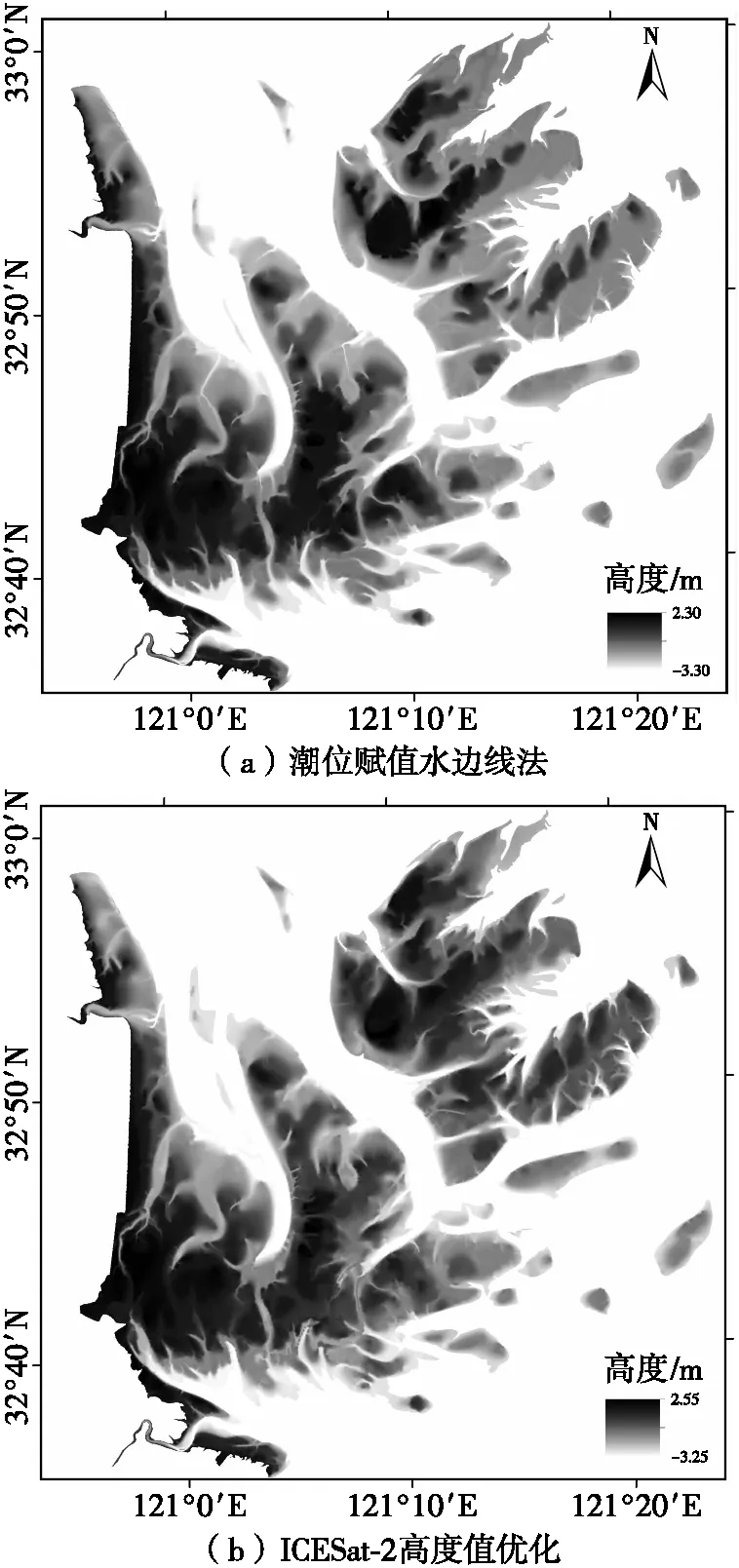
图5 2021年下半年两种方法获得的DEM
为评估ICESat-2高度值对模型的优化效果,将两种方式构建的DEM模型结果与两组实测断面地形进行对比,如图6所示。本文方法与传统潮位赋值水边线法获得的DEM模型相比,R2由0.86提高至0.89,RMSE由0.45 m提高至0.34 m。两种模型结果均可观测到清晰的地形起伏变化,并与实测数据大致吻合。但在潮位较高的区域,仅依靠潮位的赋值无法准确反映潮滩上实际的地形。ICESat-2数据的输入提高了赋值水边线的精度,使得地形变化的细节被捕捉,进而显现在模型中。模型与实测断面存在的微小差异可能是由数据不同的采集日期导致的。因此,受研究区域广阔、复杂且多变的地形,以及潮滩地区本就存在的时空动态变化等因素的影响,构建模型的数据应该尽可能控制在更短的时间跨度内。
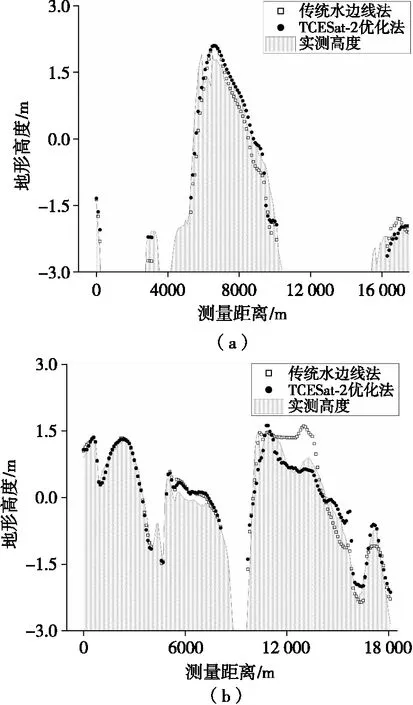
图6 DEM结果误差对比
4 结 语
本文通过对ICESat-2激光点云剖面数据进行低通滤波的降噪处理,提取了潮滩地形高度数据,并与潮汐水位数据相结合,使用反距离权重的插值,进而提高水边线赋值的精度,构建了新的DEM模型。基于轨道剖面范围的高度值对整体潮滩地形进行优化,实现了从二维到三维的转换,结果符合潮滩地形基本规律,进一步验证了ICESat-2数据应用于潮滩地形反演的可行性,为构建人类活动影响下的潮滩演化理论奠定了数据基础,并为湿地生态环境保护和海岸防灾减灾提供了科学支撑。然而,目前的研究仍存在一定的局限性,如ICESat-2发射的绿色激光对于辐射沙脊群水域浑浊水体透射率极低,因此激光卫星无法获得水面以下的水深信息,潮位情况不可避免地阻碍卫星获取地形数据。但对于清澈水体绿色激光具有良好的穿透性,展现了ICESat-2在潮滩地形反演、水深勘探等领域的巨大潜力。