一种基于并联卷积神经网络的InSAR相位滤波方法
2023-09-02张继超李继虎赵鹏飞
张继超,李继虎,赵鹏飞
(1.辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000;2.辽宁工程技术大学 软件学院,辽宁 葫芦岛 125105)
0 引言
合成孔径雷达干涉测量(interferometric synthetic aperture radar,InSAR)技术是当前大范围地形测量与形变监测的重要技术手段之一[1],但是干涉测量结果质量的好坏主要取决于干涉图的质量。然而,在InSAR干涉测量过程中,由于系统热噪声、传感器成像几何特征(产生叠掩、阴影等)、空间和时间基线去相干以及大气环境干扰等诸多因素的存在,使得干涉所得的条纹图像存在不规则且严重的噪声[2]。因此,提高干涉图滤波的效果将有效改善相位解缠的质量。
InSAR干涉相位滤波方法主要包括空间域滤波和频率域滤波。空间域滤波算法中具有代表性的有均值滤波、Lee滤波等。这些滤波效果应用在干涉条纹中效果较差,例如Lee滤波是根据斑点噪声模型而有针对性地进行去噪,但是忽视了干涉条纹纹理的含义,导致去噪效果较差。之后,Chao等[3]提出的refined Lee滤波专门用于干涉条纹的研究,使用人为规定的滤波方向模板进行有方向性的滤波,使得在相邻方向上的滤波产生了断裂现象,滤波效果并不理想。频率域滤波算法中,Goldstein滤波是最经典的算法之一,也是应用最为频繁,为传统方法中改进最多的一种InSAR干涉相位滤波方法,但是其滤波参数的选取比较片面,而且自适应去噪强度效果不强,使得去噪效果并未得到明显提升。此外,不论是频率域还是空间域滤波都是设定固定滑动的滤波窗口,使得临近区域的像素依赖性较大,降低了分辨率,导致无法较为细致地保持干涉图的条纹细节。当前,随着卷积神经网络在图像处理中的优势,一些较为新型的网络也在InSAR图像处理中变得多了起来。2018年,Mukherjee等[4]将卷积神经网络(convolutional neural network,CNN)引入到InSAR干涉相位去噪中,展示了CNN框架对这一方向的有效性。2020年,Mukherjee等[5]又结合了CNN与对抗生成网络提出了GenInSAR的生成模型,用于学习InSAR数据分布,提高了相位去噪效果。同年,Pu等[6]提出了一种基于编码器-解码器结构的循环网络对干涉相位进行滤波,在良好去噪的同时计算效率优异。Liu等[7]在2021年提出一种改进的U-Net网络用于InSAR干涉相位去噪。2022年1月,Pu等[8]又将深度学习与非局部InSAR滤波结合,提出NL-PFNet的网络结构,大幅提高滤波运算速度。Anantrasirichai等[9]利用InSAR阶段的CNN,通过光学图像的传递学习来监测火山变形。Sun等[10]提出了一种DeepInSAR框架用于InSAR相位滤波与相关估计的方法,设计出了一种以深度学习为思想框架的InSAR干涉相位滤波的研究方法。
为了解决传统算法难以达到良好去噪与细致条纹信息保留的问题,本文利用卷积神经网络快速与智能的优势,提出一种并联卷积神经网络的残差学习方法,用于对InSAR干涉图进行滤波。通过InSAR数据仿真实验与实测干涉数据实验,验证本文滤波方法的有效性。
1 基于并联卷积神经网络的InSAR相位去噪模型
1.1 干涉相位的噪声学习模型
实际干涉过程中所得到的干涉相位与噪声相位可以用式(1)来表示。
(1)

(2)

(3)
1.2 并联卷积神经网络结构模型
图1是本文的并联卷积网络滤波处理模型图。整个主体模型主要分为3个主要结构,分别是数据预处理、特征提取层和滤波层,其原理如下。

图1 本文网络模型结构
1)数据预处理。在数据预处理中主要是将软件合成的InSAR干涉相位数据元素值提取出来,选择好研究区范围并裁剪为256×256大小的复数数据集,然后将得到的复数数据进行矢量分解得到实部与虚部两个连续数据的分量,最后将这两个分量组合成双通道张量送入网络中。
2)特征提取层。在特征提取层中使用了紧密连接的并联方式,使得每一层Block的网路结构都连接到下一层Block,通过并联组合通道的形式作为本层的输出特征层,使得可训练参数大大减小,在训练过程中可以更有效、更准确和更深入地迭代运算。同时,通过Huang等[14]对密集连接网络(DenseNets)的研究,可知多层连接的并联结构极大地缓解了梯度消失,加强了特征传播与减少参数量的特点。因此,对于InSAR干涉图特征明显、训练数据需要更丰富的特性,这种参数量少而高效的网络结构用来训练InSAR干涉条纹是非常合适的。
3)滤波层。在这一层,用来学习余弦通道与正弦通道干涉噪声残差的特征,提取未知噪声程度下的盲噪声,有利于对图像中噪声分布不均的地方进行不同程度的去噪,防止在高噪声区域去噪能力弱,在低噪声区域过度滤波,并利用残差学习和批归一化处理加速训练的拟合,提高噪声学习效果。在最后的网络输出部分得到噪声残差,通过图像的恢复模型可计算出干净的相位(式(2)、式(3))。
表1展示了本文网络与形状大小。

表1 本文网络的各个layer输入输出的形状大小
1.3 残差学习与损失函数
在整个的网络学习过程中本文借鉴了深度卷积网络的残差学习方法[15],即使用的是观测相位与真实干净相位的差值作为标签来进行学习与迭代。这种残差学习方法有利于解决神经网络性能退化问题。通过这种方式预测出残差相位,并结合实际观测相位从而提取出干净的相位信息。
在整个传播迭代中,对于每个实部、虚部通道中都有如式(4)所示损失函数。
(4)
式中:RESreal和RESimag分别表示网络预测的实、虚通道的输出残差分量。
2 InSAR相位噪声的仿真与实验流程
2.1 基于DEM反演的InSAR相位噪声的仿真
为了本文所使用的深度学习方法能够有一个强有力的训练数据集,使得神经网络能够达到优异的学习结果,同时,也需要仿真实验进行参照和对比说明滤波结果的精度与质量是否有效,本文使用数字高程模型(DEM)模拟地表真实干涉相位,以得到更真实的仿真效果。哨兵1号卫星的相关参数用于干涉仿真与噪声仿真的反演。下面介绍InSAR仿真所需的模型。
1)DEM反演干涉模型。根据上地面点与卫星的几何位置可知地面点的干涉相位[16]如式(5)所示。
(5)
式中:B表示两颗卫星的基线长度;H表示拍摄主影像卫星的高程;α为两颗卫星基线与水平方向上的夹角;r0为斜距;h为地面点的高程;λ为波长。
2)干涉噪声特征模型。在实际的InSAR系统中,干涉相位噪声存在着一定的统计特征,符合一个概率密度函数(本文的研究过程中均采用视数为1的干涉过程用于处理),其计算如式(6)所示[17]。

(6)
式中:φi为此点实际的干涉相位,其数学期望为φi0;γi为此点的相干性。
3)相干系数模型。相干性系数在InSAR干涉测量中是衡量两幅SAR影响相干质量好坏的一个参数。两幅SAR数据的去相干源主要包括卫星位置基线(几何去相干)(γgeo)、热噪声去相干(γthermal)和时间去相干(由于实验是使用DEM与相关卫星参数进行干涉模拟,因此时间去相干暂不考虑)等,根据这些去相干源可知InSAR系统的总体去相干(γtot)如式(7)所示。
γtot=γgeo×γthermal
(7)
本文中参考的是哨兵1号数据平台的参数(表2),根据上述涉及到的模型及原理可根据DEM反演仿真处InSAR系统平台的干涉相位,如图2、图3所示。其中包含噪声的干涉相位图将作为模型训练的输入样本,干净的干涉相位与包含噪声的干涉相位的残差将作为模型训练的标签样本。

表2 几何去相干仿真涉及到的系统参数
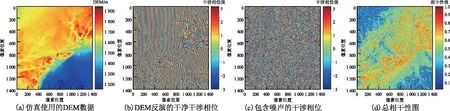
图2 InSAR干涉仿真数据

图3 InSAR干涉仿真数据
2.2 滤波实验与对比流程
本文实验与对比流程如图3所示。具体实验步骤如下。
步骤1:获取研究区的DEM与仿真InSAR平台系统参数,反演研究区的噪声干涉相位图与干净干涉相位图。
步骤2:将获得的仿真干涉相位图的一部分制作数据集(仿真噪声图作为模型输入,噪声与干净相位的残差作为标签),并送入网络训练至模型收敛,得到训练权重。
步骤3:将获得的仿真干涉相位图的另一部分数据送入网络中,加载训练权重预测残差并进行滤波,同时将这部分数据送入到Boxcar、NLmean、Goldstein滤波器中得到这4种滤波方法的滤波结果。
步骤4:将以上滤波结果送入到评价指标中进行分析比较。
步骤5:将实测数据使用软件干涉后重复步骤3、步骤4过程。
3 实验结果对比与分析
3.1 仿真数据实验
仿真实验使用仿真数据中干涉条纹相对较为密集的区域进行滤波对比(本文方法与Boxcar滤波、NL-mean滤波以及Goldstein滤波对比)。
图4是InSAR仿真干涉图与4种滤波方法结果对比。参考干净相位的条纹特征可以对比出NL-mean在这种条纹密集处产生了过度滤波,使得密集条纹没有很好地被保留;而Boxcar与Goldstein尽管条纹效果保持得相对较好,但是在这些区域的去噪能力不够;本文的滤波方法在这种区域的去噪能力与密集条纹保持效果相对其他3种滤波方法都有提升。通过滤波结果与仿真干净相位的残差对比可以直观地看出本文方法的残差更小,滤波精度更高。
表3为仿真滤波结果的评价标准与计算速度,其中包括均方差(RMS)、相位残差点数量、相位导数标准差、相位标准偏差(PSD)(表4为这几种滤波方法的滑动滤波窗口大小,仿真实验与实测实验的滑动滤波窗口均相同)。通过表格可分析Boxcar滤波效果的各项指标都相对较差;NL-mean和Goldstein滤波方法的去噪性能相近,其中NL-mean表现略高于Goldstein滤波;本文方法的评价结果都相对较好,说明本文滤波方法的去噪效果良好,尤其在相位残差点数量的控制方面较大改观,并且计算速度相较于其他几种方法有大幅度提高。

表3 仿真滤波结果的评价标准与计算速度

表4 实验对比的这几种滤波方法的滤波窗口大小
3.2 实测数据实验
为了验证本文滤波算法在实际影像中的滤波效果,选取福建省泉州某地区(图5(a))的哨兵1号2019年1月10日与2019年1月22日的1A数据进行实测数据效果测试,其实测干涉结果如图5(b)所示。由于该地区山地较多、木林茂盛、地势条件复杂多样,容易形成较为密集的干涉条纹的同时也带来了复杂的干涉噪声,因此,此数据来检测本文滤波方法的有效性是比较合适的。图5(c)至图5(f)为实测数据分别使用Boxcar、NL-mean、Goldstein滤波方法与本文方法的干涉滤波结果对比。在总体的视觉效果上可以看出,本文的滤波方法条纹保持效果与去噪能力不差于其他几种方法。

图5 研究区卫星影像与实测干涉图及其4种滤波方法结果对比
表5使用了相同的几种评价标准对这4种滤波方法与计算速度进行了对比。通过表中数据可以明显看出,本文方法在各项评价指标都比其他3种方法要好,特别在相位残差点数量的控制上效果优异,这样的效果有益于包裹相位的展开,使得InSAR干涉测量技术顺利地进行。同时,使用仿真数据的训练模型在实测数据中展现了良好的预测结果与较快的运算速度,说明本文方法能够适应实际的InSAR条件下的干涉相位滤波处理。

表5 实测数据滤波结果的评价标准与计算速度
4 结束语
为了更好地在去除相位噪声的同时保持紧密的干涉条纹不被破坏,本文结合密集连接的神经网络搭建并联卷积神经网络的滤波模型,通过仿真实验与实测实验的验证,本文的滤波方法相对于其他3种方法,滤波效果有明显提高,不仅能够在相位分布不均匀与强度不同的噪声中良好去噪,而且也最大限度地保留了密集的条纹信息。通过几种干涉图质量的评价对比,本文滤波方法的表现均高于其他几种方法,尤其在相位残差点数量上有着非常明显的下降,提高了干涉相位的质量。同时,相较于传统的滤波方法,本文结合卷积神经网络的方法滤波时间大幅缩短。综上所述,本文提出的并联卷积神经网络的InSAR相位滤波方法在去噪与密集条纹的保持上效果较强,证明了该算法的有效性,且能够适应实测数据的滤波处理。