盾构隧道壁后空洞典型GPR图像特征正演分析
2023-09-01陈峻浩孙竹妤岳云鹏赖思聪
刘 海,陈峻浩,孙竹妤,岳云鹏,赖思聪,孟 旭
(1. 广州大学 土木工程学院,广东 广州 510006;2. 广东省滨海软土地区地下结构安全防护工程技术研究中心,广东 广州 510006)
随着我国地下空间的开发进程不断加快,对城市轨道交通的建设提出了越来越高的要求[1]。地铁隧道作为地下结构重要的组成部分,在城市轨道交通中的占比逐渐增大[2]。盾构法是地铁隧道施工的主要方法,在地铁隧道施工中发挥着重要作用。在盾构隧道施工过程中,由于盾构机超挖、注浆压力不足和浆液凝固收缩等原因,使盾构管片壁后常出现空洞、脱空、注浆不密实等隐蔽缺陷[3-4]。而空洞作为最常见的隧道壁后隐蔽缺陷,会使空洞边缘的隧道管片产生应力集中现象,降低管片承载力,随着空洞的扩大,最终产生管片裂缝、渗漏水甚至掉块等表观病害,造成严重的经济损失甚至人员伤亡[5]。因此,亟需在地铁隧道施工期和运营期内开展对盾构隧道壁后空洞的检测,以保障地铁隧道的安全运营。
探地雷达(Ground Penetrating Radar,GPR)是一种利用高频电磁波(10 MHz~3 GHz)探测目标体的地球物理勘探方法[6],已广泛应用于地质勘探[7]、探月工程[8]、道路空洞探测[9]和地下管道探测[10]等。与传统的无损检测方法相比,GPR具有效率高、适应性强和分辨率高等特点[11],已被广泛应用于地铁隧道施工期与运营期的安全检测中。但现有的雷达数据主要以人工解译为主,在进行隧道壁后隐蔽空洞探测时,由于地铁隧道现场环境复杂,空洞检测图像不易分辨[12],其识别效果与技术人员的工作经验有很大的关系。此外,由于盾构隧道内部的密集钢筋网会对雷达信号产生较强的屏蔽效应[13],将严重影响工作人员对隧道壁后空洞的数据解译精度[14]。因此,对地铁隧道壁后空洞进行正演模拟,研究空洞部位的电磁响应特征,可以帮助工程技术人员更客观、更准确地识别衬砌脱空缺陷.
在GPR正演模拟方法中,由于时域有限差分法(Finite Difference Time Domain,FDTD)可以对电磁波的时域进行计算,具有逻辑简明、计算速度快、精度高等优点,而被许多学者所采用[15]。Lai等[16]通过数值仿真和模型试验相结合的方式,对不同尺寸的地下空洞雷达图像特征进行分析,总结了地下空洞的GPR图像特征规律;杨道学等[17]结合基于FDTD方法和实测数据对比,判断矿山地下巷道是否充水,并得出巷道交汇区域的GPR探测解译准则;梁小强等[18]运用FDTD方法开展管线探测中的GPR探测,分析雷达管线探测与各种影响参数之间的关系;吴丰收等[19]通过FDTD方法高精度模拟雷达波在隧道衬砌中的传播特性,展示出钢筋网对雷达波的强干扰性及对下方目标体检测的影响;戴世坤等[20]通过有限单元法实现了频率域2.5维GPR正演模拟,为雷达正演提供了重要的理论参考依据和技术支撑。但正演模拟在地铁隧道壁后空洞检测领域的应用还属于初步阶段,不同尺寸、形状的隐蔽缺陷在盾构管片背后的电磁响应特征差异较大,因此,有必要针对隧道壁后不同空洞的雷达图像特征进行正演研究,推动GPR在隧道检测工程中的应用。
基于此,本文首先采用FDTD建立不同尺寸、形状壁后空洞的隧道管片模型,并对检测图像及电磁波场的特征进行分析,研究其电磁响应特征与规律。然后建立盾构隧道壁后空洞探测足尺试验平台,对仿真数据进行验证,为实际地铁隧道壁后空洞的数据解释提供参考。
1 GPR探测原理
GPR系统主要由雷达主机、天线及显示器组成,其主要原理是通过天线发射器向地下辐射高频电磁波脉冲信号,经盾构管片分层界面或隐蔽缺陷反射后返回,通过接收天线接收反射信号回波实现对地下目标的探测,如图1所示。由于不同地下目标的相对介电常数存在差异,当电磁波在地下介质中传播时,遇到介电特性存在差异的目标体,如空洞、分层界面时,电磁波会发生反射,其回波被接收天线所接收,同时雷达主机记录反射波的波形、振幅强度和双程走时等信息[20-21]。通过对反射回波的处理和分析,在地铁隧道安全检测过程中,可以确定隐蔽缺陷和分层界面的位置[22]。
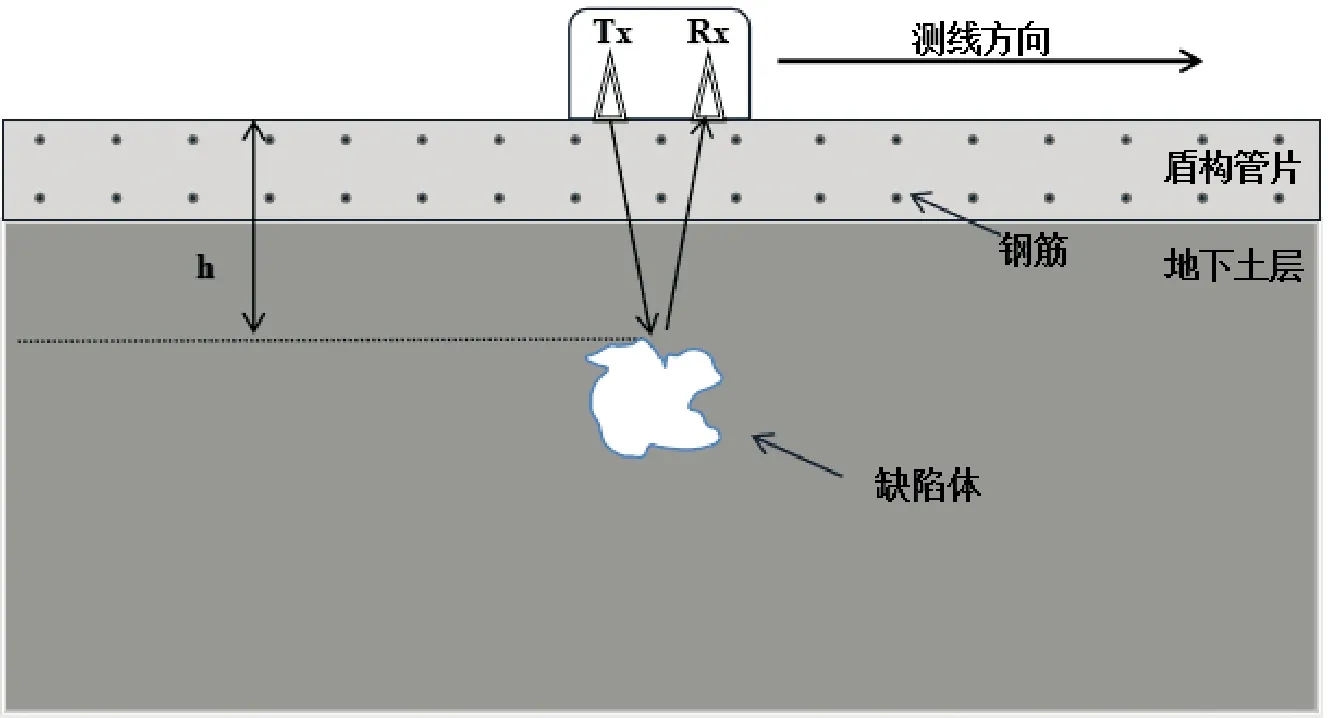
图1 GPR探测盾构隧道壁后空洞示意图
不同介质中电磁波的传播速度不同,传播速度与介质的相对介电常数有关,根据电磁波在介质中的传播速度,则目标体埋深h的计算公式如下:
(1)
式中,c为电磁波在空气中的传播速度(m/ns),εr为介质的相对介电常数,t为电磁波双程走时(ns)。
2 地铁隧道检测正演模拟
2.1 FDTD方法
根据电磁波传播理论,电磁波在介质中传播时,电磁场量与发射源的关系符合Maxwell方程组,其一阶偏微分表达式如下[23]:
(2)
(3)
▽·B=0,
(4)
▽·D=qv,
(5)
式中,E为电场强度矢量(V/m),qv为电荷密度(C/m3),B为磁感应强度(T),J为电流密度(A/m2),D为电位移矢量(C/m2),t表示时间(s),H为磁场强度(A/m)。
在Maxwell方程组中,电磁场属性参数被假定为在时间和空间上分布的函数,为求解偏微分形式的Maxwell方程组,进一步实现对GPR的正演模拟,需要借助FDTD。FDTD主要原理是将网格单元和基本时间增量对连续的空间和时间进行离散化,并将Maxwell方程的偏微分形式应用于每个单元,将电磁场中的Maxwell方程通过二度中心差分法,转化为差分方程,进而求解差分方程得到微分方程的近似解[24]。二维Yee网格如图2所示。
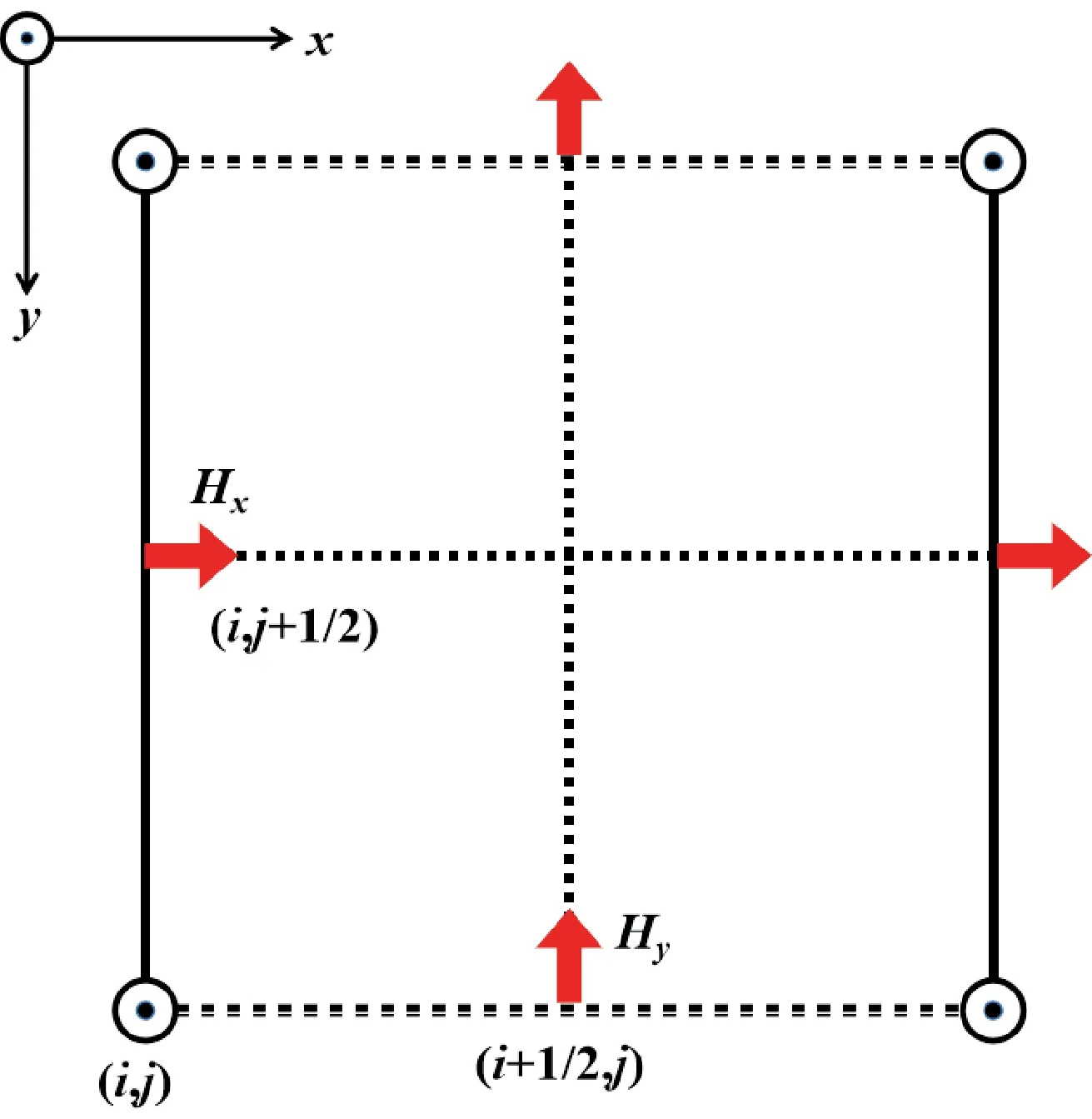
图2 FDTD 中的Yee网格
由FDTD的原理可知,划分单元网格的尺寸将极大地影响算法的精度和准确性,同时,离散化后的电磁波频散现象将导致计算误差。研究表明,为减少对网格步长数值引起的模型离散化的频率散射影响,离散单元的网格大小需小于波长的1/10,以保证模拟的准确性[25],如式(6)所示:
(6)
式中,Δx、Δy分别表示Yee网格在x和y方向上的空间步长(m);λ为电磁波中心频率的波长。
此外,在求解Maxwell方程组时,时间增量及空间步长并不是相互独立的,每一步迭代的时间步长也会影响正演结果准确性[26]。为保证模拟过程中电磁波的关系不被破坏,时间增量及空间步长需满足稳定性条件:
(7)
式中,Δt为时间步长(ns);c为电磁波在空气中的传播速度(m/ns)。
2.2 模型建立
本文基于FDTD方法建立盾构隧道管片模型并进行GPR的正演仿真。图3(a)为本文建立的尺寸为6.0 m×3.5 m(长×宽)双层介质空洞模型,首层介质模拟30 cm厚的隧道衬砌结构,由混凝土与钢筋网构成,另一层介质为隧道壁后土体。

图3 盾构隧道壁后空洞仿真模型及正演图像
正演仿真选用600 MHz中心频率的雷达天线进行模拟,探测隧道壁后不同尺寸的方形、圆形空气空洞/富水空洞。采用FDTD仿真模拟时需要设置模型电性参数。其中,混凝土的相对介电常数为6.0,电导率为0.01 s/m;石英砂的相对介电常数为4.0,电导率为0.000 1 s/m;水的相对介电常数为81.0,电导率为1 s/m;钢筋相对介电常数为1,电导率为100 s/m。为更加贴合实际情况,建模时在隧道管壁处考虑接缝影响,并设置双层钢筋网以获得与实际情况相近的GPR响应。钢筋的直径设为5 mm,空洞与隧道壁后的间距设为30 cm。模型的主要参数如表1所示。
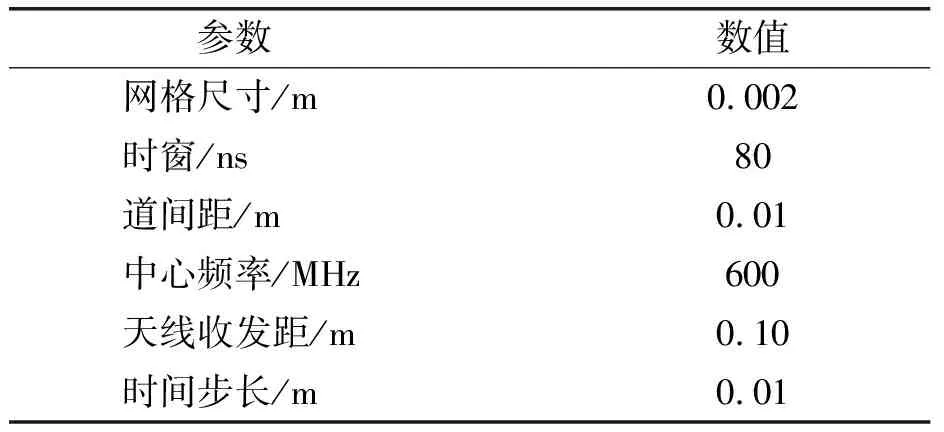
表1 模型参数
正演结果如图3(b)所示,1 ns时间位置对应第一层钢筋网的强反射,4 ns处对应第二层钢筋网的强反射。两层钢筋的计算间距约为0.20 m,与模型相符。对于设置富水空洞的模拟结果,空洞产生的反射信号能够清楚地被观察到图3中Δt为空洞顶部和底部雷达反射信号间的时延。
3 仿真结果分析
3.1 典型图像特征分析
本文使用尺寸和形状不同的空洞进行模拟,分别为边长/直径30 cm、40 cm、50 cm、60 cm、70 cm、80 cm的立方体/球体进行模拟,表2为地铁隧道壁后空洞的FDTD仿真图像。可见,随着空洞尺寸的增加,反射信号越明显,且反射信号的形状变化存在一定规律。空洞的B-scan图像特征呈双曲线、交叉状以及碗状3种规律变化。其原因主要是反射信号波形取决于雷达的水平分辨率[27],GPR信号的水平分辨率是由雷达信号在对应深度的波束半径决定的,而波束半径是通过Annan等[28]提出的简化模型计算得出。该模型是使用第一个菲涅耳区域(First Fresnel Zone,FFZ)来确定信号波束的半径,如式(8)所示:
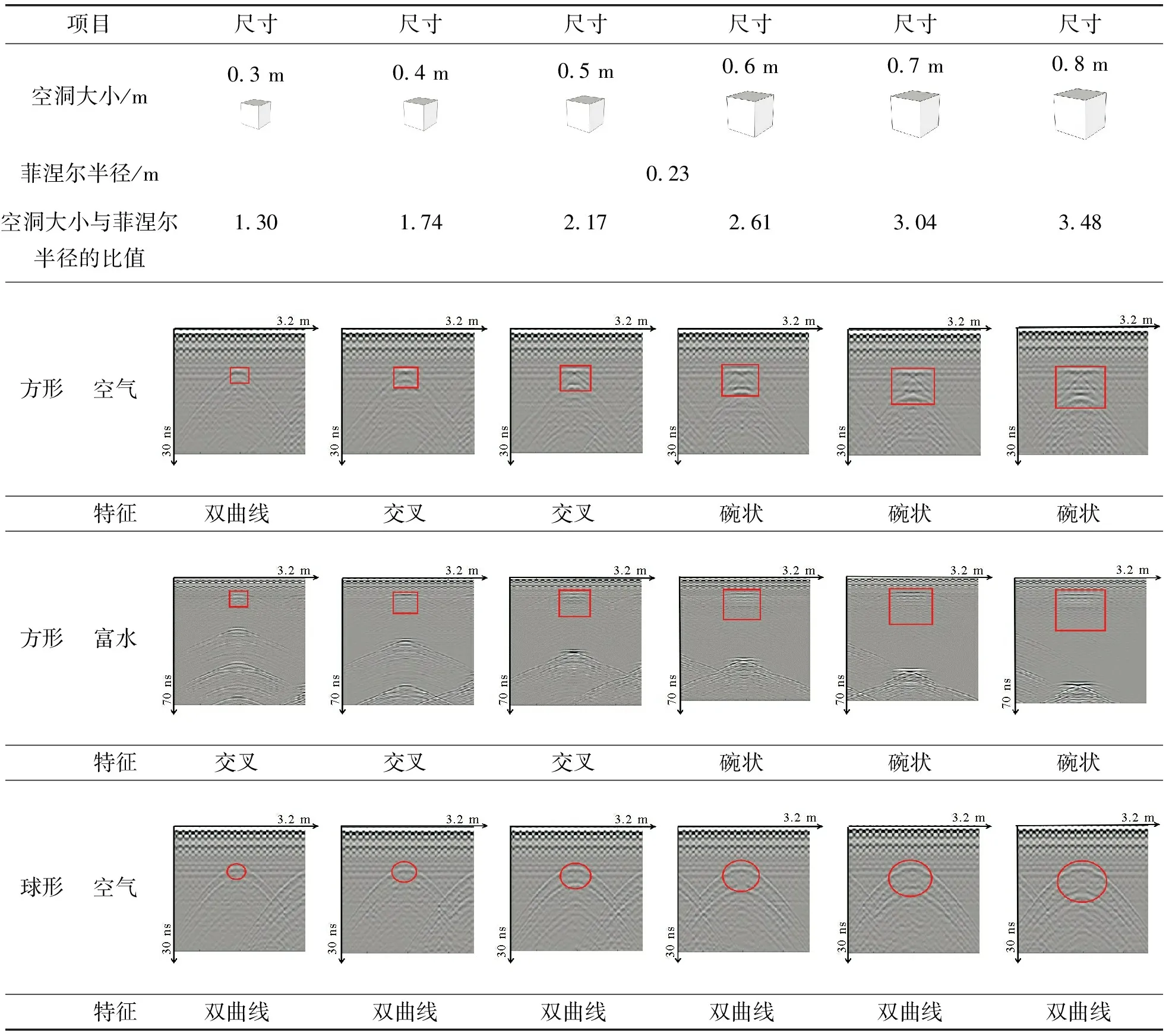
表2 壁后不同尺寸空洞/富水空洞的正演B-scan图像
(8)
式中,r(v,z,f)为GPR信号在对应深度的半径,z为深度,f为信号的中心频率,v为信号在介质中的传播速度。
本文使用中心频率为600 MHz的天线模拟了壁后间距30 cm的不同大小、形状空洞,计算得到r(v,z,f)为0.23 m。R为空洞尺寸与r(v,z,f)的比值。结合表2可见,当方形空气空洞尺寸为30 cm(R=1.30)时,图像为双曲线形,这是因为空洞大小与r(v,z,f)接近,雷达对于空洞边缘两侧识别精度不高;尺寸为40 cm(R=1.74)和50 cm(R=2.17)时,雷达可以识别空洞边缘两侧,方形空洞的反射信号在空洞顶面表现为线形,空洞边缘反射在顶面正下方出现,在顶面反射附近交叉相汇,表现为“交叉状”,且随着空洞尺寸的增大,交汇的范围变大,交汇点下移;当空洞尺寸为60 cm(R=2.61)、70 cm(R=3.04)和80 cm(R=3.48)时,方形空洞的反射信号在空洞顶面正下方有明显交汇区,可见交汇点出现在顶面下方,形状表现为“碗状”。对于方形富水空洞,反射信号在空洞正上方表现为线形,在两端为绕射的单边双曲线,但由其底部反射可以判断出与空气空洞相似的“交叉状”与“碗状”形状特征;由于水的介电常数较大,电磁波传播至顶面处时发生相位反转现象[29]。对于不同尺寸的圆形空洞,反射信号均表现为完整的双层双曲线形,且双曲线的曲率随着空洞尺寸的增大而增大。
3.2 空洞反射时延特征
在表2盾构隧道壁后富水空洞的正演图像中可以发现,富水空洞的B-scan有明显的时延现象,其原因是水的介电常数远大于空气,由式(1)可知,电磁波在水中传播的速度远小于在空气中的传播速度。同时,随着空洞尺寸的增加,空洞顶部与底部的反射时延也相应增大。为探究空洞大小与其时延的规律,分别对空气和富水空洞的尺寸与其对应仿真图像中顶部与底部反射信号间的时延进行拟合,如图4所示。
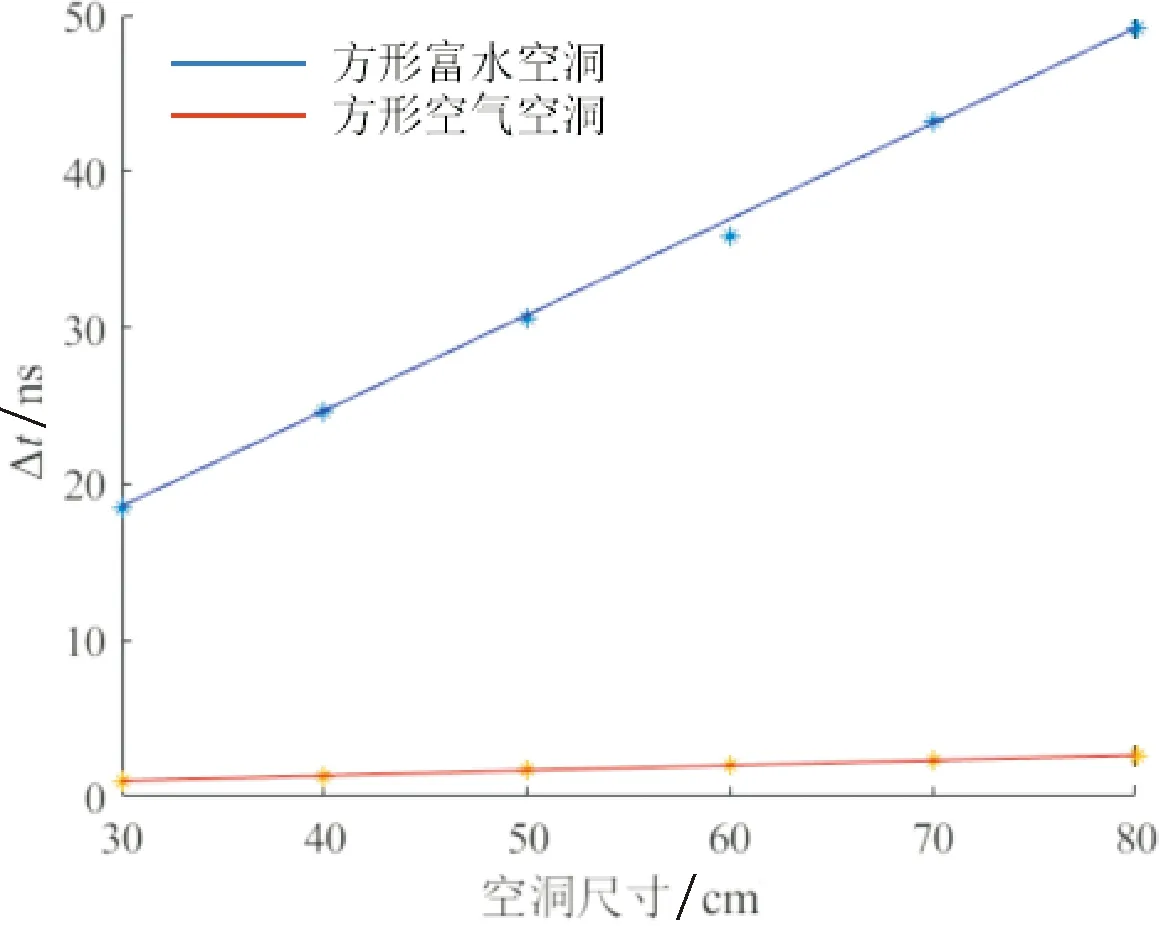
图4 空气和富水空洞时延与尺寸关系拟合结果
从拟合结果可知,方形空气空洞对应拟合直线方程为
Δt=0.03x+0.01,
(9)
式中,x为方形空气空洞的尺寸,Δt为空洞顶底反射的时间差。
方形富水空洞对应拟合直线方程为
Δt=0.61x*+0.19,
(10)
式中,x*为方形富水空洞的尺寸,Δt为空洞顶底反射的时间差。
从拟合直线中可见,空洞顶部、底部的反射时延与空洞尺寸呈正相关。对比空气空洞与富水空洞的拟合结果可见,富水空洞顶部反射与底部反射间的时延较大,这是由于电磁波在空气中的传播速度大于其在水中的传播速度,在水中为0.1 m/ns,在空气中为0.3 m/ns。
且随着空洞尺寸的增加,顶底反射间时延增大。本文总结的空洞顶部与底部的反射时延可作为推断地铁隧道壁后空洞内部填充介质与尺寸的参考。
3.3 波场仿真分析
由前述分析可知,不同填充介质的空洞在探测中存在不同的电磁响应特征,为进一步说明这种现象,本文在隧道壁后间距30 cm处分别设置边长为60 cm的方形空气、富水两组空洞,并在空洞正上方各进行了一次电磁信号激发,以1 ns为时间间隔获取了正演模型内部电场强度。空气/富水空洞的波场仿真效果分别如图5、图6所示,可见,电场强度在正演模型内部整体呈现衰减趋势,但在遇到钢筋以及空洞的时候,在其背后会产生强电场区域。
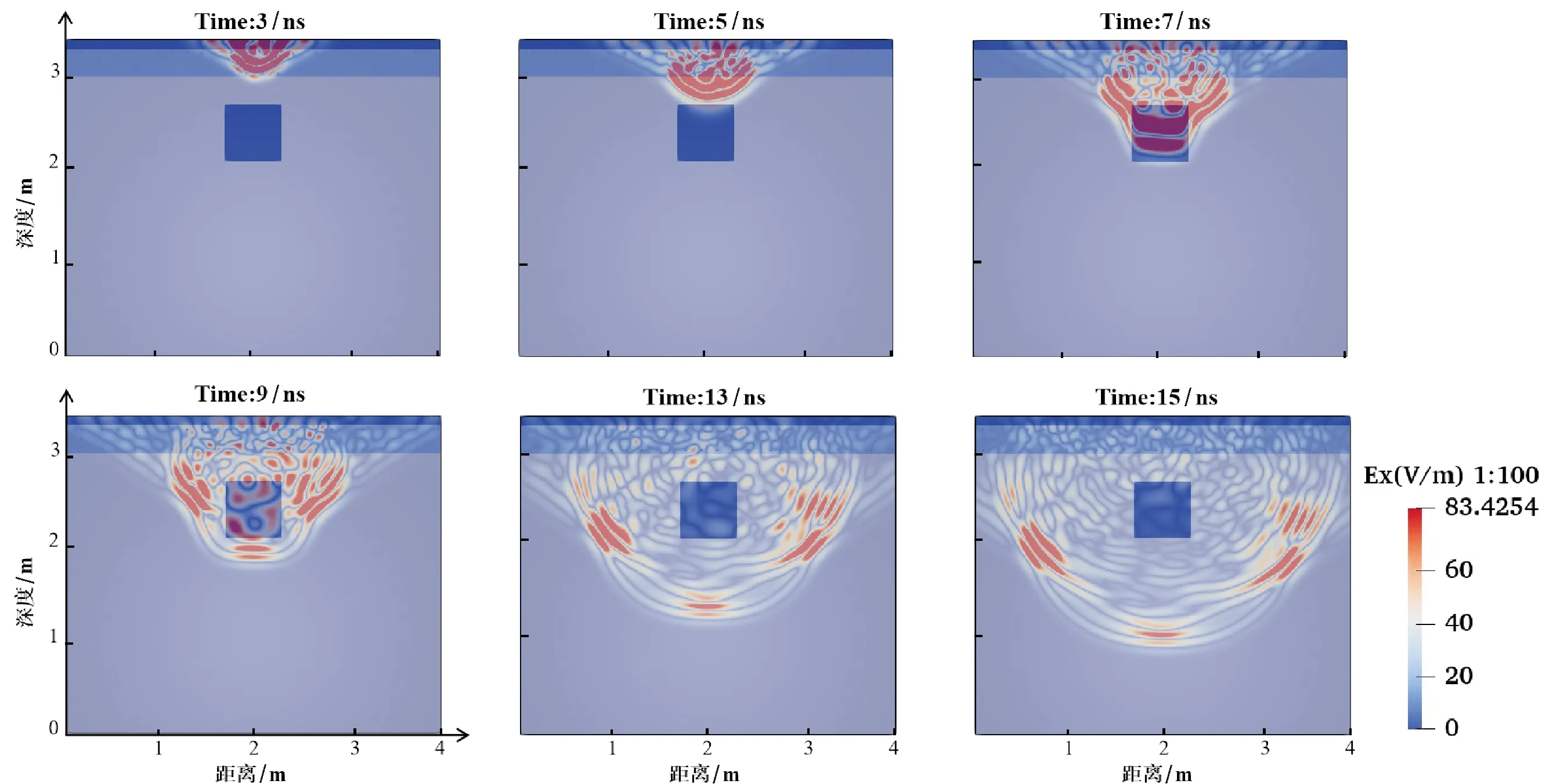
图5 不同时刻的空气空洞电磁场正演模拟波场快照
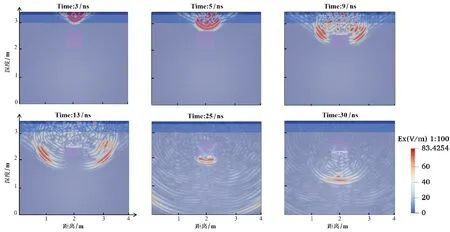
图6 不同时刻的富水空洞电磁场正演模拟波场快照
图5为电磁波在不同时刻的盾构隧道壁后空气空洞波场分布图,在t=3 ns时,电磁波穿过了双层钢筋网区域到达地下介质区,在双层钢筋网区域内部传播距离较小,主要原因为混凝土管片区域相对介电常数较大,电磁波传播速度下降。可见电磁波在钢筋位置发生明显的反射和散射,在附近产生绕射波,并在钢筋中心部位产生反射波,电磁波的能量被吸收,电场强度极值出现较大衰弱,此时对应正演图像中的管片处。在t=5 ns时,电磁波即将到达空洞位置,而上部双层钢筋网的反射波也到达接收天线处。在t=7 ns时,电磁波穿越空洞,部分电磁波在空洞顶部反射,产生与顶部形状相对应的较平反射波;另一部分电磁波透射进入空洞内,在空气介质中传播,波形也与空洞形状相对应。因为空气的相对介电常数相较于外部地下介质区较小,电磁波在空气空洞中传播速度较快,同时空气对电磁波衰减能力低于地下介质。在t=9 ns时,电磁波在空洞内部发生多次震荡,部分电磁波穿透空洞,从空洞底部透射出的电磁波向四周扩散,部分绕空洞边缘扩散,此时电磁波幅值较小。在t=13 ns时,发射的电磁波均穿透空洞,在地下介质区以相对较低的速度传播。在t=15 ns时,电磁波部分开始被设置的完美匹配层(Perfectly Matched Layer,PML)边界吸收。
图6为富水空洞波场分布图,在t≤5 ns时,即电磁波到达空洞顶部以前,电磁波传播情况与在空气空洞传播过程一致。在t=9 ns时,可见电磁波到达富水空洞顶部界面产生较强的吸收,未快速透过顶部富水界面。其原因是水的相对介电常数相较于外部介质较大,电磁波在水中传播速度慢,被富水界面吸收较多能量。在t=13 ns时,空洞内部透射的电磁波传播速度明显慢于空洞外部,使外部电磁波已经传播至空洞外部时,空洞内部的电磁波传播还未通过空洞大小的一半。在t=25 ns时,在空洞内部多次反射的电磁波到达并穿过空洞底部,而未在空洞内部传播的部分电磁波已经被PML边界吸收。在t=30 ns时,空洞底部的反射波向接收天线传播,从空洞内部穿过的电磁波在地下介质区传播速度加快。
从波场分布仿真表明,电场强度在正演模型内部整体呈衰减趋势,电磁波在到达空洞之前,在双层钢筋网处出现绕射波并被衰弱,在空洞内部传播的电磁波会产生多次震荡。因介电常数不同,由式(1)可知,电磁波在空气空洞和富水空洞的传播速度具有明显差异,这也是导致富水空洞的底部反射有较大时延的直接原因。
4 实测及结果分析
4.1 实验平台建立
为验证GPR模拟仿真结果的准确性,本文建立盾构地铁隧道壁后空洞探测实验平台进行试验,如图7所示。实验平台由两块盾构隧道标准环管片以及3面砖墙围建而成,管片内径为270 cm,厚度为30 cm。实验平台内填充均质石英砂,其相对介电常数为2.9。试验过程在盾构隧道管片壁后30 cm处分别埋设50 cm和60 cm的空心亚克力正方体,用于模拟空洞。在管片内壁布置了1条水平测线,测线高度距离平台顶部60 cm。采用中心频率为600 MHz的IDS商用探地雷达沿隧道环向进行探测。在试验过程中,时窗长度设置40 ns,采样点数设置2 048,道间距设置为0.01 m。
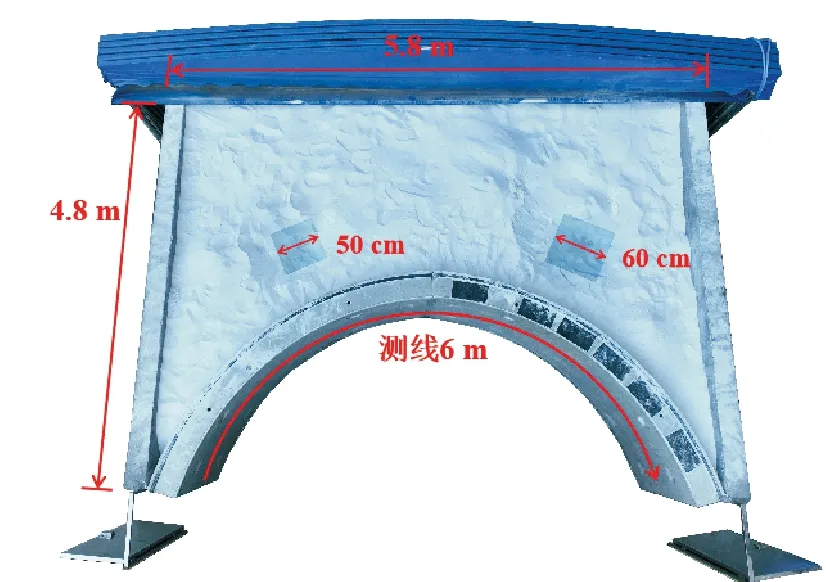
图7 盾构隧道壁后空洞探测平台示意图
4.2 实测数据验证
为提高采集数据信噪比,突出目标体反射特征,本文对实测得到的原始数据进行了去除直流信号、背景去除、增益、带通滤波和平滑滤波等数据预处理。预处理后的B-scan如图8所示,实测图像中从0~6 ns是管片层,内部的双层钢筋网清晰可见;6 ns底部处为管片层和砂层的分层界面;10 ns处左右分别为尺寸50 cm和60 cm的方形空气空洞,两个预设空洞的反射信号清晰,与正演模拟结果一致。当方形空洞尺寸为50 cm时,实测雷达图像呈现“交叉状”;当空洞尺寸增大到60 cm时,由于空洞边缘位置的间距大于波长,雷达可以更清晰地识别边缘两侧反射信号,下部反射图像交汇点可见,图像呈现“碗状”。
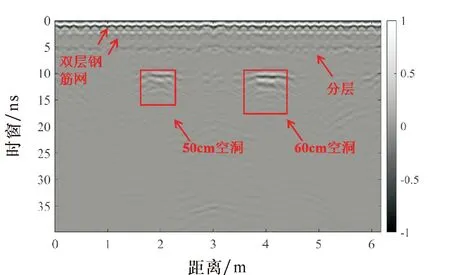
图8 方形空气空洞实测图
5 结论与展望
本文采用数值模拟与实验室实测相结合的方式,探究了隧道壁后空洞的GPR响应规律,模拟了GPR进行隧道壁厚空洞检测的过程,并对检测图像的变化规律进行了分析,同时对电磁波传播过程进行了探讨得出以下结论:
(1)方形空洞电磁响应特征为线形与绕射波组合的形式,随着尺寸大小的增加,会从“交叉状”过渡到“碗状”。圆形空洞均呈现为完整的双层双曲线,曲线曲率随着尺寸增加而增加。因此,不同空洞的电磁响应特征可以作为判断空洞形状和尺寸的依据。
(2)富水空洞相对空气空洞有明显的强反射特征,两者可以根据空洞顶部与底部的反射时延进行区别,反射时延可以作为判断空洞尺寸的依据。
(3)电磁波在空洞内部发生多次反射以及以更快或者更慢的速度通过整个模型,这会导致壁后探测区内电磁信号的多次震荡。电场强度极值在钢筋处明显减弱,对电磁波探测钢筋后的缺陷造成较大影响。
由于盾构隧道管片中的密集钢筋网钢筋会对探测信号产生较大的屏蔽效应,影响实测数据的解译,后续研究将结合人工智能手段,对实测图像进行处理,减弱钢筋的干扰,增强盾构隧道壁后隐蔽缺陷的反射信号。考虑到现实中盾构隧道壁后空洞大多为非标准方形、球形,本文下一步将对不规则形状空洞的检测与识别展开研究。
