基于变增益PID 的两栖航行器控制律设计*
2023-08-31夏金铭宋大鹏孟子晗
夏金铭 宋大鹏 孟子晗 仇 坤
(江苏科技大学电子信息学院 镇江 212000)
1 引言
水空两栖航行器一词自提出后基本上可归结为载人概念样机,因为载人两栖飞行器除了要考虑两种不同流体介质的布局、结构、驱动等兼容性要求外,还要考虑工作舱设计、生命保障系统设计及相关因素,因此具有更高的复杂性与技术难度[1]。随着无人系统的发展,各国将载人机转变为无人设备,使其具有无人机的高速机动和快速部署能力,以及无人艇的快速游弋能力,在军民两用方面展现出了广阔应用前景[2~4]。
近年来,许多控制理论方法被应用到无人系统领域。针对四旋翼无人机,文献[5]采用串级模糊自适应PID 控制算法,针对无人艇,文献[6]采用模糊自适应PID 控制器进行控制,系统稳定性、快速性和准确性相比单一PID 控制有了显著提升。文献[7]采用线性二次型最优控制器进行控制,文献[8]提出双闭环积分滑模控制系统,增强控制器鲁棒性与抗干扰性控制精度高。文献[9]将滑模控制器与基于切换函数的扩张状态观测器设计方法所得的系统扰动估计值结合,有效抑止传统滑模控制的抖振现象,文献[10]采用自抗扰方式对四旋翼无人机进行控制,并引入虚拟控制量对位置和姿态进行控制解耦,应用扩张状态观测器实现状态解耦和扰动估计,此控制器具有良好的解耦效果、抗干扰和鲁棒性能。然而,两栖航行器具有无人艇与无人机的非线性、强耦合等特性,其数学模型更加复杂,采用单一控制器[11~12]难以实现平稳控制。
本文主要解决两栖航行器水空介质切换时的稳定性问题。首先建立两栖航行器的数学模型,然后采用PID 方法与变增益PID 方法设计控制器,最后合成一个控制器,并对模型控制律进行仿真实验以验证所提方法的有效性。
2 两栖航行器数学建模
本文研究对象如图1 所示,采用船体结构与四旋翼结构结合的模式,当四旋翼作为动力输出时,两栖航行器进入飞行模式或过渡模式;当船体尾部推进器作为动力输出时,两栖航行器进入航行模式。
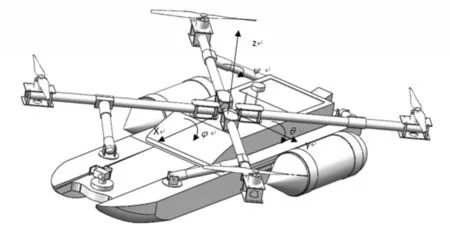
图1 两栖航行器系统结构和坐标系
为简化模型分析,提出以下假设[13]:
1)两栖航行器为刚体,在运动过程中质量保持不变;
2)地面坐标系视为惯性坐标系;
3)地球表面是平的,且忽略自转与公转;
4)重力不随高度变化而变化;
5)两栖航行器关于x-z平面对称;
6)飞行模式为低速飞行时忽略空气摩擦力;
7)飞行模式进行低速小角度飞行。
建立两栖航行器的数学模型[14],惯性坐标系以及航行器坐标系如图1 所示。两栖航行器的方向由横滚角φ、俯仰角θ、偏航角ψ三个欧拉角表示。基于航行器坐标系的旋转矢量表示为ΩΤ=[φ,θ,ψ],对应的角速度矢量为ωΤ=[p,q,r];基于惯性坐标系的位置矢量表示为rΤ=[x,y,z],对应的线速度矢量为vΤ=[u,v,w]。两栖航行器所受外力fΤ=[X,Y,Z],关于原点所受外力矩为mΤ=[K,M,N]。
根据牛顿力学与拉格朗日力学可得航行器平动方程与航行器转动方程:
式中,m表示航行器自身质量,vc=[v1,v2,v3]Τ表示体固定参照系中的线速度,ω=[ω1,ω2,ω3]Τ表示地固定参照系中的角速度,Ic表示物体的惯性张量,fc与mc表示外力重心所受的外力与外力矩。
令τRB=[f,m]Τ、υ=[v,ω]Τ,将式(1)和式(2)简化为式(3):
式中MRB表示刚体惯性矩阵,CRB(υ)表示刚体Coriolis矩阵与向心矩阵。
2.1 两栖航行器飞行阶段模型
当两栖航行器处于飞行阶段时,只考虑其高度与姿态角的建模设计,航行器四个旋翼产生力与力矩,决定系统的控制输入量Z、K、M、N。则两栖航行器飞行阶段模型可用下式表示:
式中υ=[w,p,q,r]Τ、τ1=[Z,K,M,N]Τ,M1、C1(υ)表示为
2.2 两栖航行器航行阶段模型
当两栖航行器处于航行模式时,只考虑其姿态角的建模设计,航行器两个螺旋桨产生力与力矩,决定系统的控制输入量K、M、N,航行器所受的力与力矩中包含来自水的影响所产生的外力与外力矩,即τ2=τH+τRB,其中τH表示水动力与水力矩,τ2表示系统的控制输入量。
其中,MΑ表示附加的质量矩阵,CA表示流体动力学Coriolis与向心矩阵,D(υ)表示水阻尼。
由于此系统中υ=[p,q,r]Τ、τ2=[K,M,N]Τ,所以两栖航行器航行阶段模型可用式(13)表示:
其中M2、C2(υ)表示为
2.3 两栖航行器过渡阶段模型
当两栖航行器处于过渡阶段时,两栖航行器四个旋翼产生升力使航行器上升,其附加的来自水的外力与外力矩会随其与水接触面积的改变而变化,由此可知MΑ、CΑ(υ)D(υ)与两栖航行器和水平面的相对高度h相关。当两栖航行器未离开水面时,两栖航行器模型与其航行阶段相同;当两栖航行器脱离水面时,两栖航行器模型与其飞行阶段相同,由于其输入控制量与飞行阶段输入控制量相同,则两栖航行器航行阶段模型可以表示为
3 两栖航行器控制器设计
由于两栖航行器有三种不同工作阶段,所以此处分别设计三种不同的控制器对该两栖航行器进行控制。
3.1 两栖航行器航行阶段控制器设计
两栖航行器处于航行阶段时,通过改变尾部的两个电动机的转速来调节两个螺旋桨的转速,进而改变推力,当两个电机转速相同时,推动两栖航行器前进;当两个电机转速存在差异时,两栖航行器做偏航运动,两栖航行器顶端四旋翼提供升力进行横滚角度以及俯仰角度控制,稳定航行器。控制量τ2=[Kw,Mw,Nw]Τ,采用航行阶段横滚角控制器、俯仰角控制器与偏航角控制器对其横滚角φ、俯仰角θ与偏航角ψ进行控制。
当两栖航行器处于航行阶段时,根据上述两栖航行器航行阶段的模型,可得其航行阶段数学模型表达式:
由此设计两栖航行器航行阶段控制器,此处采用PID控制器对其进行控制[15~16]:
式中T为航行阶段的输入,e表示各通道误差,KPa为PID控制器比例系数,KIa为PID控制器积分系数,KDa为PID控制器微分系数。
3.2 两栖航行器飞行阶段控制器设计
两栖航行器处于飞行阶段时,可以视其为四旋翼无人机结构。通过调节4 个旋翼的转速使产生的升力发生变化,当4 个旋翼转速相同时,两栖航行器垂直升;当旋翼转速存在差异时,两栖航行器做横滚、俯仰或者偏航运动,从而实现对两栖航行器高度h、横滚角φ、俯仰角θ、偏航角ψ的控制。
飞行阶段的近似线性化模型表明,两栖航行器高度h、横滚角φ、俯仰角θ、偏航角ψ四个通道相互独立,因此可以对这4 个独立的姿态控制回路分别设计PID 控制器。设飞行阶段高度h、翻滚角φ、俯仰角θ与偏航角ψ的控制量为τ1=[Za,Ka,Ma,Na]Τ。根据上述飞行阶段模型,取得其飞行阶段数学模型表达式:
3.3 两栖航行器水空过渡阶段控制器设计
当两栖航行器处于水空过渡阶段时,航行器停止对螺旋桨的控制,转而对飞行旋翼进行控制。该阶段两栖航行器仅改变高度,采用高度控制器进行控制,姿态角控制器仅起稳定作用。式(16)表明相比于飞行阶段与航行阶段,两栖航行器的水空过渡阶段由于航行器与水接触面积的变化,会导致其扰动处于不断变化的过程中。单个PID 控制器难以满足两栖航行器的控制要求,不能直接采用飞行阶段或航行阶段所使用的PID 参数进行控制。本文设计了变增益PID 对两栖航行器水空过渡阶段进行控制。当两栖航行器与水接触面积相同时,其扰动也相同,所以两栖航行器对于不同高度下的扰动选择不同比例系数、积分系数、微分系数实现PID控制。设水空过渡阶段高度h、翻滚角φ、俯仰角θ与偏航角ψ的控制量为τRB=[Zg,Kg,Mg,Ng]Τ。
3.4 两栖航行器总控制器设计
两栖航行器的运动状态分为航行阶段、飞行阶段以及水空过渡阶段,可以采用高度为变量,以变增益PID 的形式表示两栖航行器的PID 参数。当两栖航行器距水平面高度小于2m 时,可采用表3所示的参数;当两栖航行器距水平面高度大于2m,即处于飞行模式时,可采用表2所示的参数。
4 仿真结果
采用Matlab 软件对上文中提出的模型以及算法进行仿真,取两栖航行器参数如表1所示。
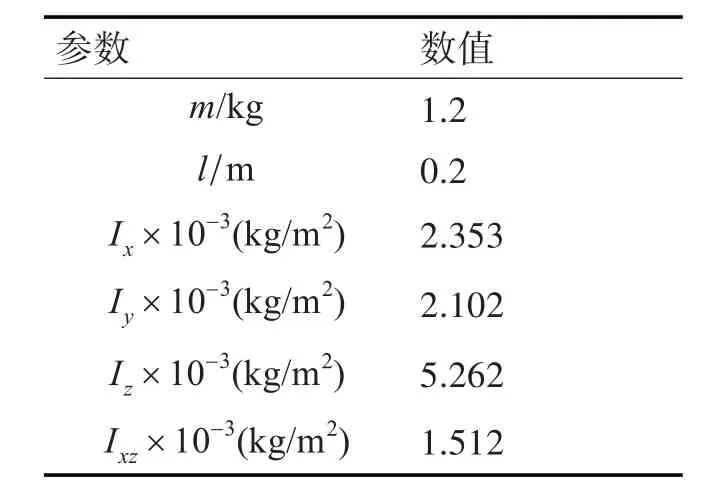
表1 两栖航行器参数
设两栖航行器初始高度为零,离开水面高度为2m,所受的初始外力与外力矩皆为零。
根据两栖航行器航行阶段模型,设计两栖航行器航行阶段控制器,由表1 参数,取式(17)和式(18),得到如表2所示的PID参数。
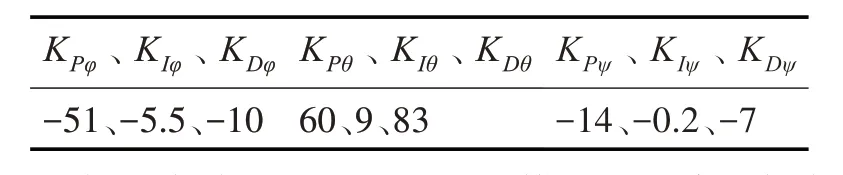
表2 两栖航行器航行阶段PID参数
根据两栖航行器飞行阶段模型,设计两栖航行器飞行阶段控制器,由表1 参数,取式(18)和式(19),得到如表3所示的PID参数。
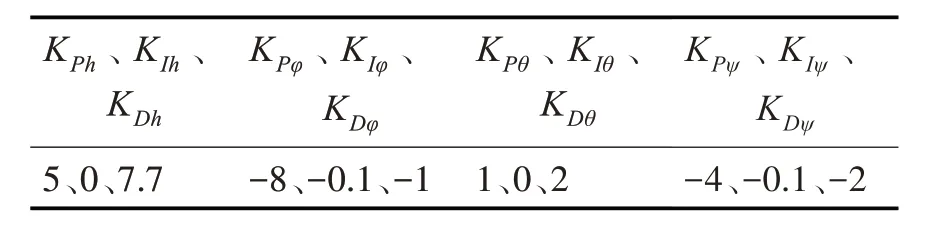
表3 两栖航行器飞行阶段PID参数
根据两栖航行器水空过渡阶段模型,设计两栖航行器水空过渡阶段控制器,由表1 参数,取式(18)和式(20),取得PID参数如表4所示。
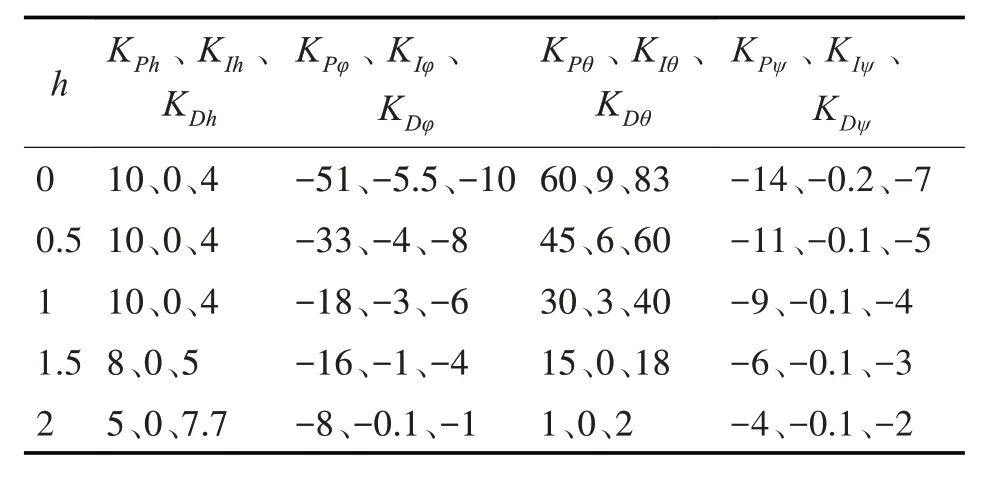
表4 两栖航行器水空过渡阶段PID参数
图2 为两栖航行器航行阶段对偏航角度ψ的控制。外部输入偏航角期望角度ψd为30,由图2可见,在PID 控制器控制下峰值时间约为6s,调节时间约为7.5s,稳态误差趋近于0。可见航行阶段偏航角度PID控制器的性能能够满足控制要求。
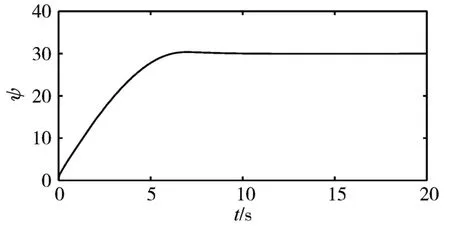
图2 两栖航行器航行阶段偏航角度响应
图3 为两栖航行器航行阶段对横滚角度φ的控制。外部输入横滚角期望角度φd为30,由图3可见,在PID控制器控制下峰值时间约为6.5s,调节时间约为8s,稳态误差趋近于0。可见航行阶段横滚角度PID 控制器性能能够达到对两栖航行器航行阶段横滚角控制要求。
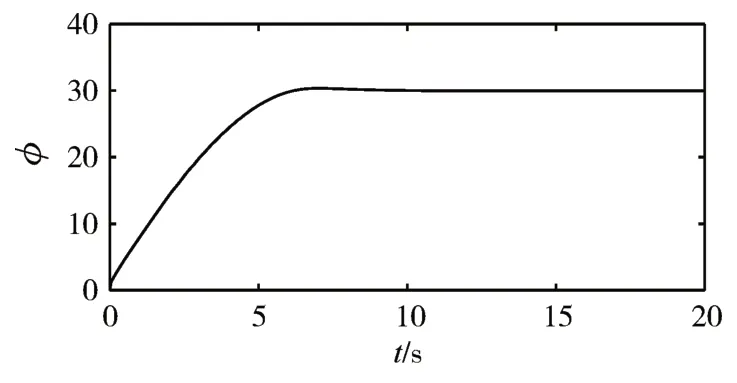
图3 两栖航行器航行阶段横滚角度响应
图4为两栖航行器航行阶段俯仰角度θ的控制。外部输入俯仰角期望角度θd为30,由图4 可见,在PID 控制器控制下峰值时间约为2s,调节时间约为3s,稳态误差趋近于0。可见航行阶段俯仰角度PID 控制器性能能够达到对两栖航行器航行阶段俯仰角控制要求。
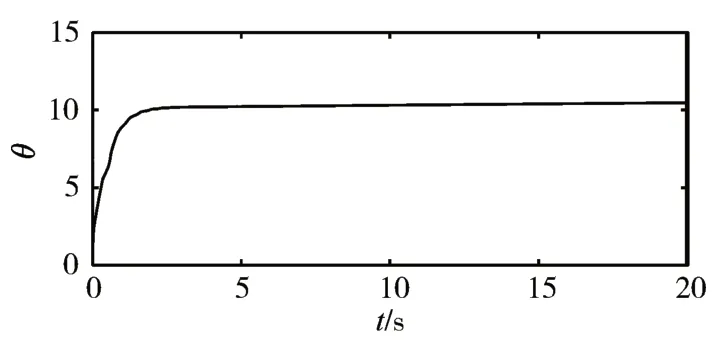
图4 两栖航行器航行阶段俯仰角度响应
图5~图8 为两栖航行器飞行阶段分别对其高度h、横滚角φ、俯仰角θ、偏航角ψ的控制结果。
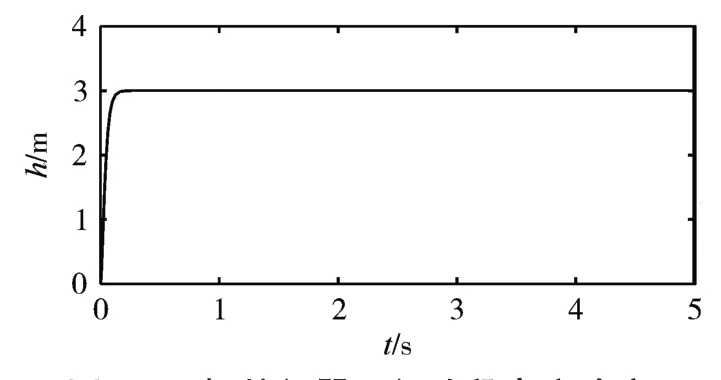
图5 两栖航行器飞行阶段高度响应
进行高度控制时,设置期望高度为3,由图5可见,在PID控制器控制下峰值时间约为0.1s,调节时间约为0.1s,稳态误差趋近于0。横滚角控制时,设置期望角度为20,由图6可见,PID控制器控制下峰值时间约为2.2s,调节时间约为3.1s,稳态误差趋近于0。进行俯仰角控制时,设置期望角度为20,由图7 可见,在PD 控制器控制下峰值时间约为1.4s,调节时间约为1.5s,稳态误差趋近于0。进行偏航角控制时,设置期望角度为20,由图8 可见,在PID控制器控制下峰值时间约为4s,调节时间约为4s,稳态误差趋近于0。
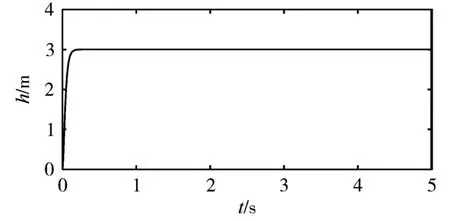
图6 两栖航行器飞行阶段横滚角度响应
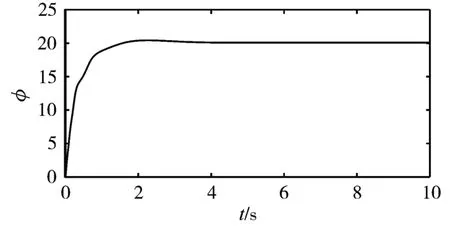
图7 两栖航行器飞行阶段偏航角度响应
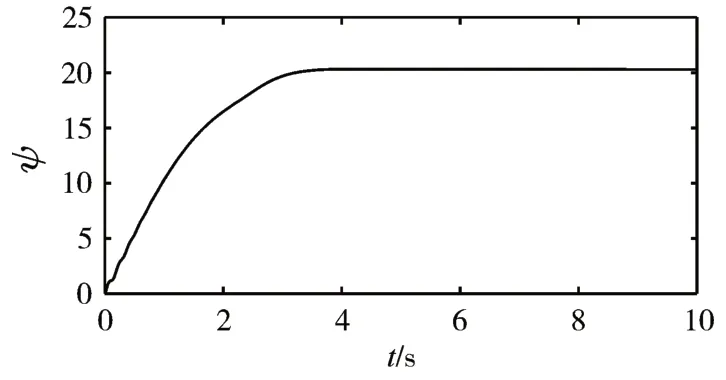
图8 两栖航行器飞行阶段俯仰角度响应
由此可见所设计的飞行阶段PID 的性能能够达到对两栖航行器飞行阶段的控制要求。
图10~图13 为两栖航行器在水空过渡阶段对其高度的控制,高度h低于2m 时,两栖航行器与水面接触,高于2m 时脱离水面。将其运动过程分为5 段,对高度及三个姿态角进行控制,所设比例系数、积分系数与微分系数如表4 所示,采用线性拟合手段拟合成曲线如图9 所示,高度h、横滚角φ、俯仰角θ、偏航角ψ的输出如图10~图13 所示,高度控制时,峰值时间约为0.3s,调节时间约为4s,稳态误差趋近于0;横滚角控制时,峰值时间约为0.6s,调节时间约为3.5s,稳态误差趋近于0;俯仰角控制时,峰值时间约为0.6s,调节时间约为5s,稳态误差趋近于0;偏航角控制时,峰值时间约为0.6s,调节时间约为6s,稳态误差趋近于0。仿真结果表明该控制器能够在两栖航行器的水空过渡阶段达到控制要求。
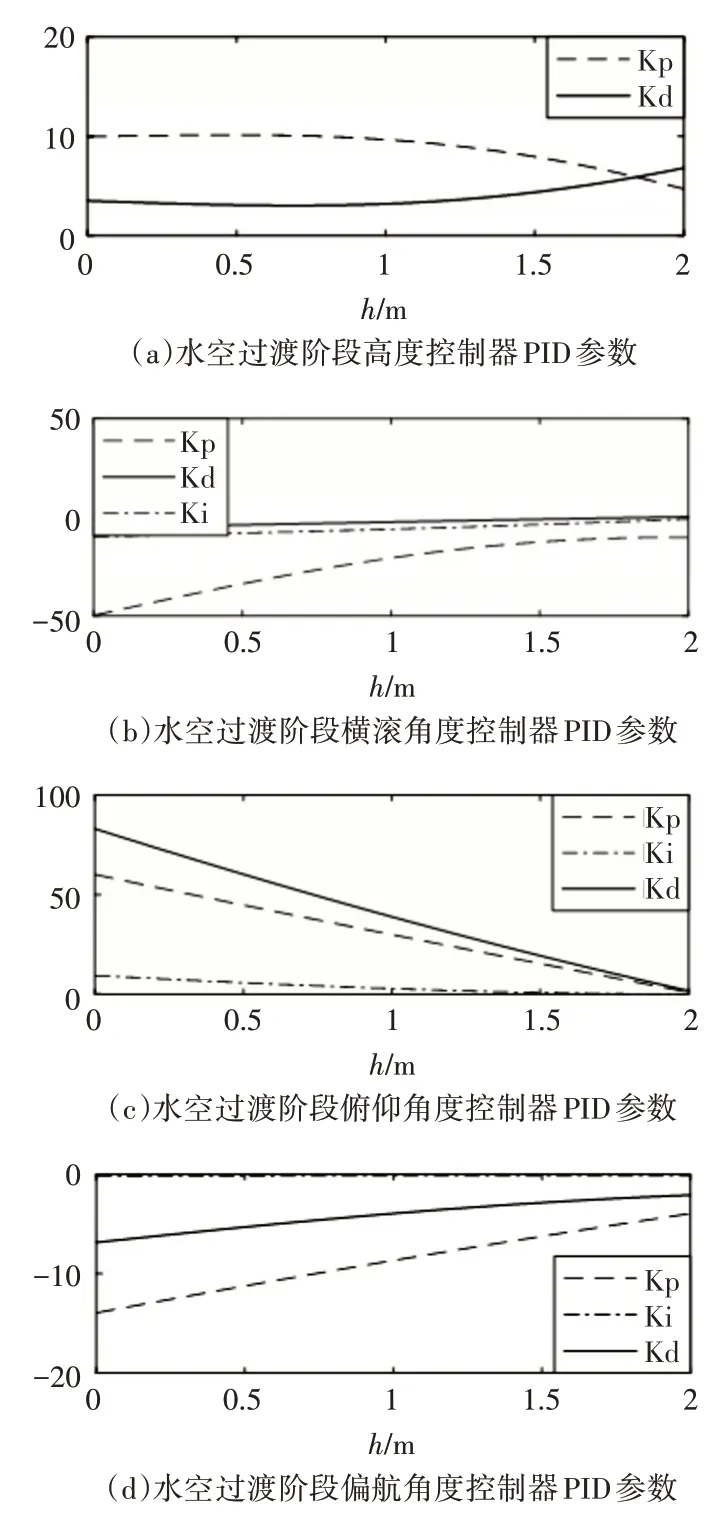
图9 两栖航行器过渡阶段各控制器参数取值曲线
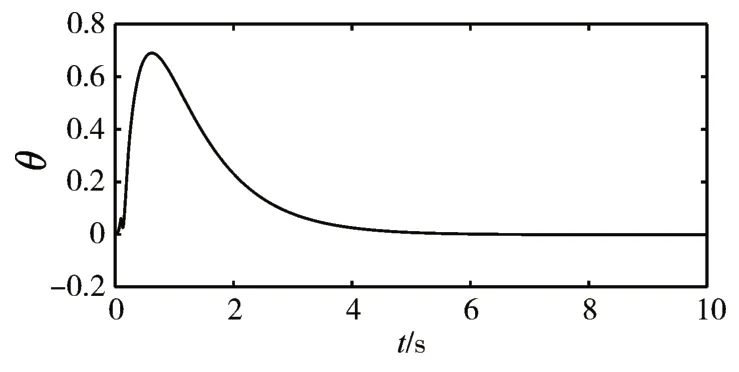
图12 两栖航行器过渡阶俯仰角度响应
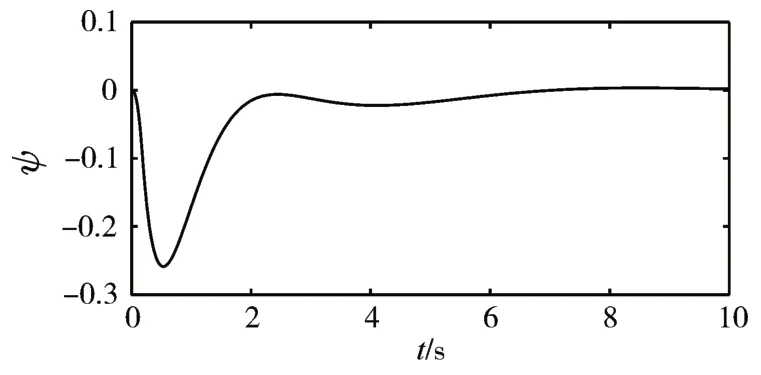
图13 两栖航行器过渡阶段偏航角度响应
5 结语
本文针对水空两栖无人航行器运动状态切换稳定控制的需求,设计了一种基于变增益PID 控制律的控制方法,通过检测不同高度判断两栖航行器接触介质的程度,配置相应的PID 参数。相比单一经典PID 控制,该控制器稳定性、响应速度均能更好满足两栖航行器在水空两栖的稳定作业要求。利用Matlab 软件在Simulink 环境中搭建两栖航行器控制仿真模块,获得了较为理想的仿真结果,验证了该控制器的可行性。
