一种融合概率分类模型的精细化室内定位方法*
2023-08-31孙顺远朱红洲
孙顺远 朱红洲
(1.江南大学轻工过程先进控制教育部重点实验室 无锡 214122)
(2.江南大学物联网工程学院 无锡 214122)
1 引言
随着WiFi[1]、蓝牙[2]以及RFID[3]等技术的不断发展,使得基于接收信号强度(RSS)的室内定位技术迅速兴起。但信号接入点(Access Point,AP)的信号由于电磁干扰、多径效应等原因易产生波动,且AP间存在信号干扰。传统定位算法不能实现大型定位区域的高精度定位,因此降低计算复杂度、提高定位精度成为该文的主要研究方向。传统的蓝牙信标不能提供到达时间差[4]或者到达角度差[5]等信息,因此选择基于指纹定位方法最为有效,通过待测点与指纹库之间近邻信息或者相关度信息建立匹配关系,常用方法有K 近邻[6]、分类模型算法[7]及神经网络[8]等方法。
离线阶段采集指纹数据时,采用滤波的方式对RSS 进行处理,提高信号稳定性[9]。针对定位区域过大带来的误差和计算复杂度的问题,文献[10]提出对定位区域基于RSS 进行分区减小定位复杂度和误差。文献[11]对五种分区方法在不同场景中的定位效果进行对比,确定出不同方法适用的场景。文献[12]提出基于余弦相似度改进欧式距离进行K-Means聚类分区,缩小信号匹配范围以减小定位误差。文献[13]提出一种基于汤普森检验理论的异常点剔除,减小信号聚类的错误物理分区。文献[14]提出一种基于多元高斯混合模型的概率分类定位方法,有效的减小不同AP 之间的信号干扰,对每个RP建立分类模型,有效提高定位精度和稳定性。文献[15]提出一种基于概率的一对多支持向量机的融合定位方法,对区域中RP 建立概率分类模型,减小了定位误差。
在复杂的定位区域中,上述的定位方法计算复杂度和定位误差较高,故该文提出一种基于一对多支持向量机(OVRSVM)和多元高斯朴素贝叶斯模型(MVGNB)的概率加权融合方法(Probability Weighted Fusion Method Based On OVRSVM and MVGNB,WSGM)。该方法采用基于余弦相似度的改进K-Means 进行RP 聚类分区,为减小信号异常点错误分区,引入汤普森检验对物理坐标进行校验,剔除错误分区点。为了减小AP间信号的干扰,建立多元高斯贝叶斯模型的概率定位方法以减小AP 间信号干扰,但是单一的多元高斯的朴素贝叶斯模型精度难以达到期望精度,故加权融合一对多支持向量机的概率定位方法以提升定位精度,实现高精度、高稳定的精细化室内定位系统。
2 指纹数据的预处理
2.1 指纹库的建立
离线阶段在目标区域内选取若干个参考点,采集该参考点位置的来自N个AP 的RSS、MAC 地址以及参考点实际坐标,并将其存入指纹库中,指纹库中包含APj,j=1,2,…,N和RPi,i=1,2,…,M以及每个AP 对应的MACi,i=1,2,…,N,未采集到的数据记为-100dB,定义指纹库为S={(x,y),mac,s},其中(x,y)i=(xi,yi)表示RPi处的坐标位置,maci表示RPi处对应AP的MAC 地址,si=[rssi,1,rssi,2,…,rssi,N]表示RPi处接收来自N个AP的接收信号强度。为减小计算量以及分区中AP 的数量,根据信号强度分布和物理连通性对目标区域进分区,划分为K个子区域ck,k∈{1,2,…,K},分区指纹库定义为Sk={(xk,yk),mack,sk}分区中坐标标签定义为,表示在RPm处的位置标签在RPm处的信号强度为=,表示在第k个子区域中RPm处接收到来自N个AP 的RSS 数据;待测点接收到的来自N个AP的RSS为st=[rss1,rss2,…,rssN]。
2.2 参考点聚类筛选
指纹数据库由大量参考点组成,而目标位置估计只依据其中部分参考点进行估计,为选取有效RP,根据RP信号分布情况以及物理坐标,采用改进K-Means 聚类算法将目标区域划分为多个子区域,将定位范围缩小到每个子区域中。指纹库中两个参考点为si和sj,采用余弦相似度指纹数据和待测点进行距离度量:
若是RPi和RPj没有相同的AP,则si和sj的相似度记为0。
根据聚类内部RSS 相似度将RP 分为K类,记ck,k∈{1,2,…,K}为第k个类,其聚类准则为
其中sk为ck的RSS均值,记为该类聚类中心,采用最大化类间相似度完成聚类。
在线阶段,根据待测点st和指纹sj之间相似度,将st分类到相似度最高的类中,该类记为Qk,分类判据为
根据分类判据将待测点st划分到Ck中,相似匹配缩小到更加精确的小区域中,进而提高定位精度,减小计算复杂度。
2.3 异常参考点剔除
根据信号强度的分区中易出现物理异常点,该文根据标准汤普森理论[16]设定决策阈值τ,实现分区异常参考点的剔除,减小了异常点的定位结果的影响。计纵算坐定出标义yk分 的中区均横c值坐k内标为的xkR的,P标均集准值合差为坐为标为,标,对准c差k中为,的物理坐标进行计算其决策值和为
式中Mk为分区ck中参考点数目,a是置信度,a越大,置信区间越宽,反之则越窄,服从t分布,可从t分布表查得,实现异常点的剔除。
3 融合概率模型的定位方法
3.1 基于多元高斯的朴素贝叶斯模型的概率定位方法
根据对定位区域中AP 信号分析得,其信号强度s符合高斯分布,该文对处,接收来自Nk个AP 的信号以多元高斯概率分布进行建模,其多元高斯混合模型的概率密度函数定义为
其Mk中个sRk为S S在数分据区,T ckk为中高接斯收模到型来元自素内数N目k,个A为P的权重系数,为多元高斯混合模型的参数布,的密度函数为,为均来值自是Nk,维协多方元差高为斯分的布高的斯第分t个混合元素,EM 算法是对多元高斯混合模型参数估计的行之有效的方法,子区域数据的对数似然函数为
多元高斯分布函数给出的是指纹数据的概率密度,根据贝叶斯准则采用多元高斯分布函数拟合sk隶属于的条件概率为
式中b为栏宽。在线定位阶段,待测点为st=[rss1,rss2,…,rssN],根据聚类分区算法得出所属的分区,进而通过MVGNB 模型计算目标属于区域内各个RP所属的高斯模型的概率,子区域中RP数量为Mk,则后验概率为
对st在i=1,2,…,Mk出的条件概率归一化,得出输出的后验概率权重为
3.2 基于一对多支持向量机概率模型的概率定位方法
传统的SVM 算法是一种二分类算法,不支持多分类问题,OVRSVM 多分类方法对于k(k>2)分类问题,把其中某一类作为一类,其余k-1 类视为一类,将k分类问题转化为k个二分类问题,子区域中包含Mk个RP,故需要构造Mk个SVM。将第i类数据记为正的,其余类别数据标记为负的,但是正负样本的不平衡易带来总体效果较差。为了解决OVRSVM 中正负样本不平衡的问题,使用两个参数和分别加权正误差和负误差,第i个SVM求解过程为如下最优化问题:
根据Platt提出的以Sigmod函数将SVM 模型的输出映射到[0,1]内,得到OVRSVM 的后验概率,即待测点st位于分区ck中处的概率为
其中Ak和Bk为参数值,通过求解参数集的最小负对数似然函数求得。
3.3 基于概率的融合定位方法
针对多元高斯的朴素贝叶斯模型和一对多支持支持向量机的各自不足之处,但是对定位坐标lm,t和lo,t融合往往忽略了内部的概率信息,该文提出一种基于概率加权的融合定位方法,根据两种模型的输出后验概率和进行加权融合得出融合后验概率为
其中λ1+λ2=1 且0 ≤λ1,λ2≤1,λ1和λ2为MVGNB和OVRSVM 的权重系数,得出融合后待测点st的坐标lt=(xt,yt)为
其中权重值λ1和λ2根据验证集求得,通过最小化误差函数进行求取
其中li为该分区验证集中数据点的实际坐标,l1(si)和l2(si) 分别为 MVGNB 输出坐标lm,i和 OVRSVM输出坐标lo,i,Vk为验证集中数据数目,进而得出最优的权重值以实现位置坐标融合。
4 实验分析
实验场景为江南大学物联网工程学院C 区一楼环形走廊中一段矩形区域,以该区域邻边作为x轴和y轴,该矩形走廊区域为2m×40m 的目标区域,在线仿真阶段,实验选取MVGNB、OVRSVM、AdaBoost以及该文提出的WSGM算法对比分析,参数配置:t分布中置信度a=0.05,栏宽b=0.5,惩罚参数C=3.6,权重λ1和λ2根据最小化误差损失函数求得。对AP在环境中信号分布分析、算法中RP聚类以及异常点效果分析,对四种算法定位精度以及采集网格大小进行对比分析,其算法聚类效果如图1所示。
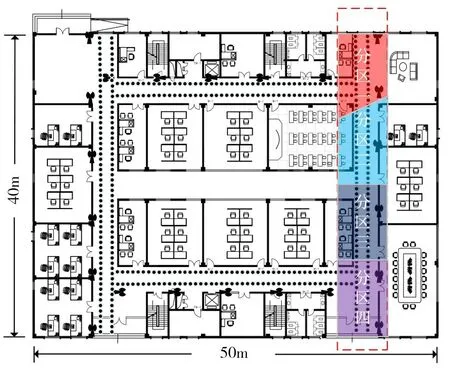
图1 实验场景聚类效果
4.1 RP筛选分析
基于指纹库中RP的信号强度的余弦相似度完成聚类分区,对矩形走廊区域中某AP 的信号分布进行分析,呈现高斯分布,但是也会出现一定的异常点,及出现概率较小的一些异常点,根据图2 可知,OVRSVM 和WSGM 聚类后定位结果中90%的测试点定位误差在1m 以内,而聚类前OVRSVM 和WSGM 的定位误差在1m 以内的只有20%和50%,定位效果较差。OVRSVM 和WSGM 算法聚类后最大定位误差约为1.54m 左右,而聚类前定位误差显然均大于4m,定位结果波动较大,故加入聚类分区后,WSGM 算法能够缩小测试点的定位区域,提高定位精度。
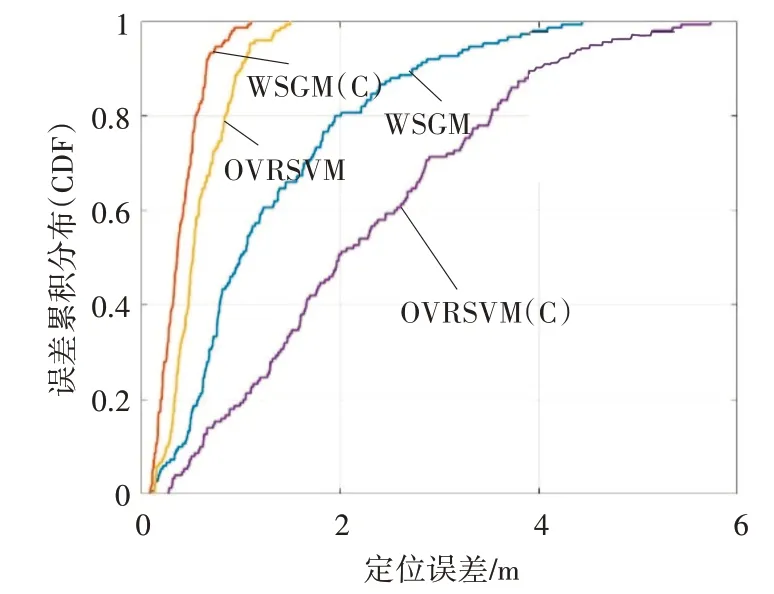
图2 聚类分区前后定位精度对比
4.2 异常点剔除分析
实际矩形走廊区域中信号的多径效应、电磁干扰会导致一些异常点的错误分区,导致定位结果的较大波动,即由于信号强度的相似性聚类至同一分区,但是物理坐标并不在同一分区中,该文引入Thompson Tau理论完成对异常点的剔除,减小定位结果的跳变。根据MVGNB、OVRSVM、AdaBoost 以及WSGM 算法的异常点剔除前(Prior,P)和异常点剔除后(After,A)平均定位误差进行对比,从表1可知,剔除聚类分区后的异常点,平均定位误差得到有效的降低,平均定位误差为0.4008m,相较于传统算法提高27%以上。较好地解决由于信号聚类而带来的错误的物理坐标聚类问题,能够弥补基于RSS 聚类分区的不足,解决物理坐标的错误分区,提高定位精度。

表1 异常点剔除前后的平均定位误差/m
4.3 定位精度分析
定位误差选取误差的箱型图和累积误差分布分析研究,对矩形走廊区域的200 组数据进行测试,实验结果如图3(a)和图3(b)所示。从图3(a)可知,该文提出的WSGM 算法相较于MVGNB、OVRSVM 和AdaBoost 算法具有更快的累计误差速度,约97%的测试点误差在1m以内,明显定位精度高于其他三种算法。从图3(b)可知,WSGM相较于其他三种定位算法,具有更低的误差中位线,为0.3620m,AdaBoost也具有较低的误差中位线,仅为0.3964m,但是误差集中度较高,较差于WSGM算法。
4.4 参考点网格间距分析
在矩形走廊区域中以1m×1m 作为网格间距采集RP 来自不同AP 的信号强度,对4 种算法的网格间距以{1,2,3,4}进行实验,分析网格间距对定位精度的影响,采用矩形走廊区域的200 组测试数据进行分析,实验结果如如图4 所示,可知1m×1m处定位精度最高,且随着网格间距的增大,定位误差随之增大,相较于MVGNB、OVRSVM 和AdaBoost三种算法,该文提出的WSGM算法在四种网格间距下均有着较好的定位效果,进一步验证WSGM算法的定位精度的提高。
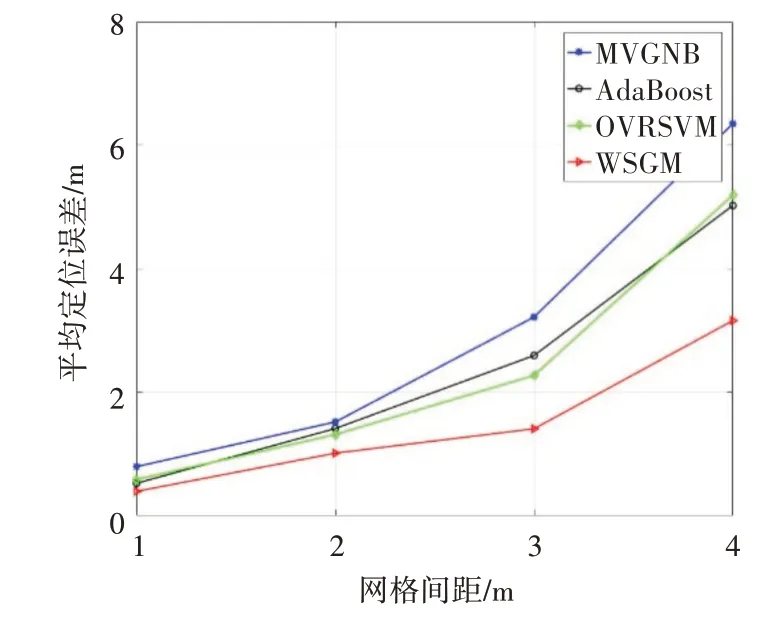
图4 不同网格间距的误差对比
5 结语
基于接收信号强度的加权概率融合的定位方法,采用余弦相似度进行改进K均值完成信号强度下的RP 聚类,采用汤普森检验理论完成对物理坐标的校验,剔除分区异常点以减小定位结果的波动,采用多元高斯的朴素贝叶斯模型以减小AP 间的信号干扰,融入一对多支持向量机概率定位方法以提高定位精度。实验分析表明,该文提出的WSGM算法相较于传统概率分类定位方法,定位精度、集中度显著提升,构建分区内RP的概率分类模型,实现了对分区后的精细化定位,有效地提高了定位精度。但是一定在离线部分的数据更新仍然是论文未考虑的一部分方向,也是之后精细化定位中的研究方向。
