基于阻尼力调节的城轨车辆复合结构车身减振控制系统设计
2023-08-30赵树萍贾雄伟张凯铭
赵树萍,贾雄伟,张凯铭,宋 勇
(1.西安交通工程学院 机械与电气工程学院,西安 710300;2.太原科技大学 机械工程学院,太原 030024)
0 引言
城轨车辆是城市交通中的重要组成部分,其运行安全程度直接影响城市居民的日常通行。为了保证铁路交通的载客质量和效率,城轨车辆由司机室车体以及多节无司机室车体组成,除了车顶、底架、端墙等基本组成结构外,城轨车辆还安装了转向架、牵引缓冲连接装置、制动装置等元件,形成了城轨车辆的复合结构形式,这种结构形式使得车辆元件之间产生较大的摩擦力与转向角,在车辆行驶过程中,发动机、路面不平顺等激励会引起城轨车辆出现明显的振动现象,并通过悬架传递到车身位置,逐渐传递给车辆的各个结构部件以及驾驶员,给城轨车辆内的所有人员和物品带来较大危害[1]。据不完全统计,城轨车辆驾驶员颈椎、腰部、骨关节以及内脏的病变均与其在城轨车辆上的长期振动有关,另外车身振动也在一定程度上加大了车辆组成元件的疲劳与破坏程度,不仅增加城轨车辆的维护费用,也提高了城轨车辆行驶的危险系数。
以降低城轨车辆复合结构车身振动给车辆本身以及车内人员、物品造成的负面影响为目的,设计并开发了城轨车辆复合结构车身减振控制系统。减振是减少各类机械中不必要的机械振动的措施,将振动信号的频率控制在正常范围内。现阶段城轨车辆使用的车身减振控制系统的控制方式可以分为主动控制、被动控制和半主动控制3种类型,通过外部能量的输入和交换,实现振动的控制为主动控制;被动控制是通过对振动源的干扰,实现对车身振动的控制,而半主动控制就是根据系统输入变化和输出的要求,实时调节车身的相关运行参数,从而使得车身获得良好的振动特性。
当前已有相关研究领域学者对城轨车辆复合结构车身减振控制方法做出了研究,文献[2]对具有多个动力阻尼器的轨道交通汽车纵向振动模型进行了研究,并给出了一种适合于城市轨道交通的多动力吸振器的设计方案。文献[3]采用双管式液压阻尼器进行汽车悬挂系统的振动控制。采用二次微分方程对其进行建模,并在单管式液压阻尼器中增设额外的气缸,设计了双管液压减振器。
然而在实际的应用与运行过程中,上述控制系统存在振动控制效果不佳的问题,为此引入阻尼力调节技术。阻尼力是与振动速度相关且方向相反的力。利用阻尼力调节技术优化设计城轨车辆复合结构车身减振控制系统,以期得到预期的控制效果。
1 城轨车辆复合结构车身减振控制系统硬件设计
优化设计的减振控制系统采用硬件与软件相结合的运行模式,硬件设备为控制任务的执行元件,软件用来生成控制指令。
1.1 构建城轨车辆复合结构模型
城轨车辆由多个车厢、转向架、牵引缓冲装置、制动装置等元件组成,其中转向架是车体与车轨间的行走设备,是保障汽车行驶质量的重要组成部分[4]。制动装置是保障城轨车辆安全运行的重要设备,能确保列车在行驶时能根据要求减速或在一定距离内停止。另外城轨车辆车身与车轮之间以悬架作为支撑,悬架结构工作原理如图1所示。
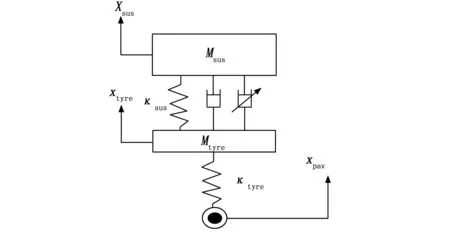
图1 车辆悬架结构工作原理图
如图1所示,以悬架作为支撑城轨车辆车身与车轮之间作用力的结构,变量xsus、xtyre和xpav分别表示的是城轨车辆中悬架和轮胎的垂向位移以及路面激励位移,Msus和Mtyre对应的是悬架和轮胎的质量,κsus和κtyre为悬架与轮胎的等效刚度。
在城轨车辆运行过程中,其内部悬架的运行满足如下方程:
(1)
式中,μ为悬架阻尼,Fc表示的是城轨车辆运行过程中的摩擦力[5]。城轨车辆复合结构中车身扭转刚度和弯曲刚度的计算公式如下:
(2)
式中,变量Z为车辆车身的施加扭转力矩,xfl和xfi对应的是左右两端前悬置点的位移,df为悬置点之间的距离,Q为弯曲工况下车身承受的总载荷值,xLmax和xRmax对应的是车身左右两侧门槛梁位移的最大值。同理可以得出城轨车辆在正常运行状态下的参数,将其代入到车辆的复合结构中,完成城轨车辆复合结构模型的构建。
1.2 安装城轨车辆复合结构车身运行传感器
通过对城轨车身振动过程的模拟与分析,可以确定车辆的实时振动情况与其所处环境以及运行速度有关,为了得出当前车辆的振动特征数据,需要对车身的实时运行数据进行采集,选择传感器作为数据采集的执行设备[6]。城轨车辆复合结构车身所需的加速度传感器采用低成本、低功耗的MMA7361微型电容式加速度传感器,该设备具有信号调节、单极点低通滤波、温度补偿、0 g线性自由下落保护等特点,可选择±6 g量程范围,并具备5 V/3.3 V的工作电压,负载响应速度非常快,适合在高噪音的供电环境中使用。系统安装的加速度传感器的数据采集电路原理如图2所示。
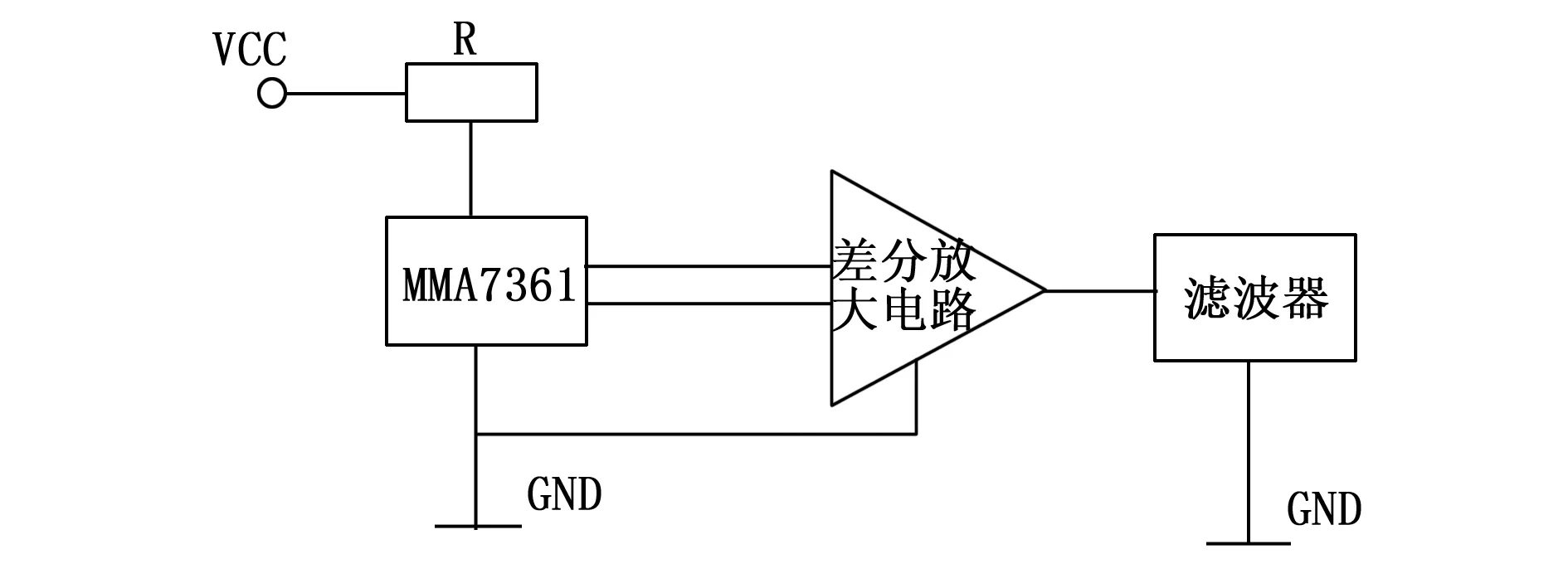
图2 加速度传感器的采集电路图
系统安装加速度传感器输出的加速度数据采集结果与检测电压之间的函数关系如下:
a=4.9Uc-12.25
(3)
式中,Uc为检测电压,a为车辆加速度的传感结果[7]。除车辆加速度传感器外,还需要在车身位置上安装速度传感器、荷载传感器等设备,将其安装在城轨车辆复合结构模型的指定位置上,完成传感器设备的安装工作。
1.3 可控阻尼器
根据车身减振控制工作中阻尼力调节量的计算结果,采用可调阻尼器作为执行元件,完成对城轨车身阻尼力的调节。选择的可调阻尼器要求能够执行双向调节任务,既能够增大车身的阻尼力,也能够降低车身的阻尼力[8]。系统装设的可调阻尼器结构及其工作原理如图3所示。
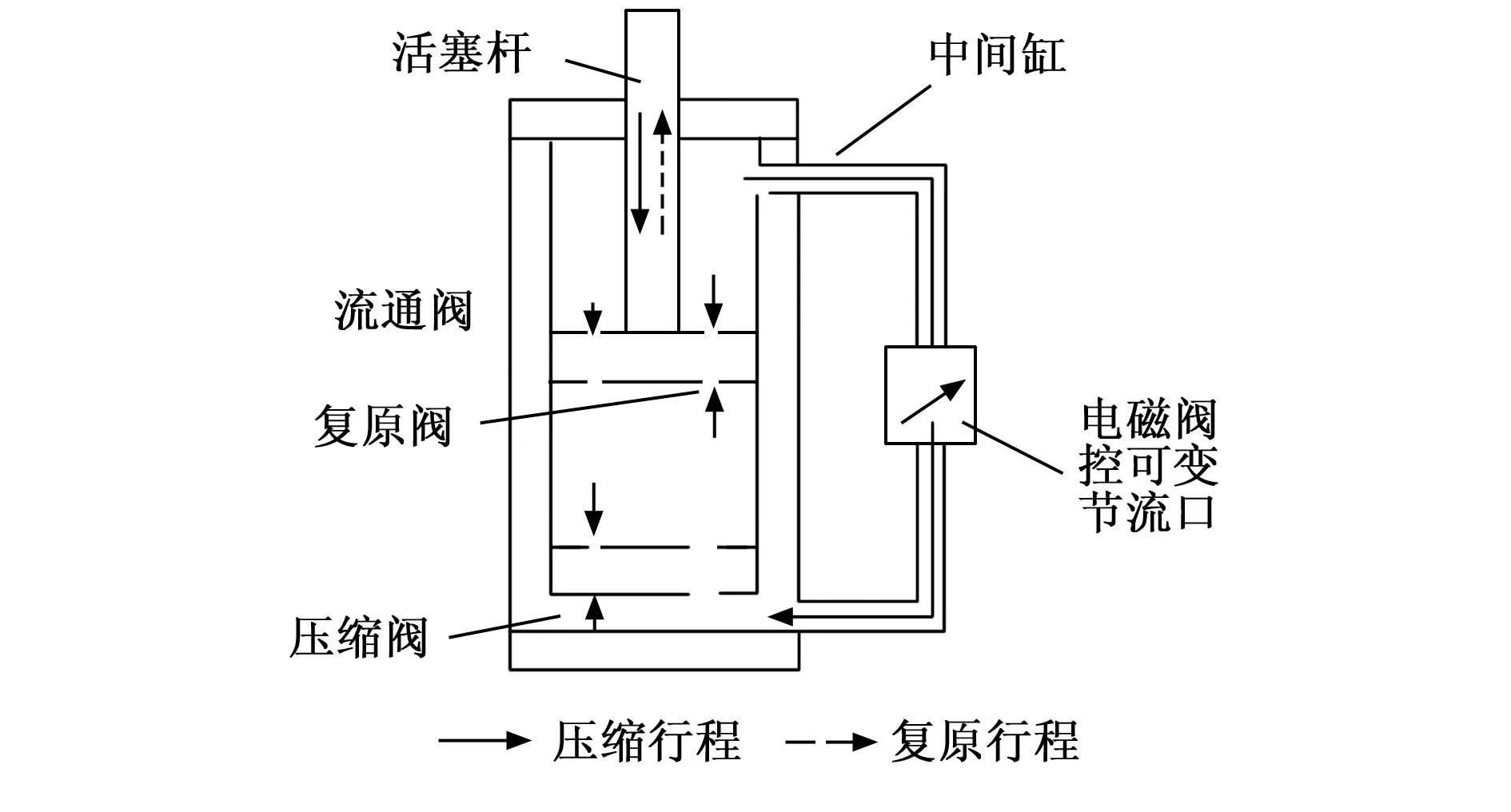
图3 可控阻尼器内部结构与工作原理图
由图3所示,可控阻尼器由阻尼调节机构、驱动机构等部分组成,其中驱动装置包括:摇动气缸、气缸保持架、支撑托垫、电磁阀,气缸和气缸组成气缸保持架和支撑托垫,使摇动气缸与阻尼器本体相结合,通过气缸的一条通道与电磁阀的通气口相连,再通过电磁阀将两个管道分别与摇动气缸相连,通过电磁阀对摇动气缸进行吸气[9]。为方便对大跨空间网壳进行半主动控制,需要采用杆件串联、长细比大的形式。因此,优化设计的可调阻尼器采用了多节柱塞结构,通过增大有效长度来补偿柱塞有效面积,从而达到最大输出功率的目的[10]。
1.4 城轨车辆复合结构车身减振控制框架
为了提高城轨车辆复合结构车身减振控制指令的生成速度,在减振控制器外部连接一个3TMSC320 DSP 处理器设备。城轨车辆复合结构车身减振控制框架如图4所示。
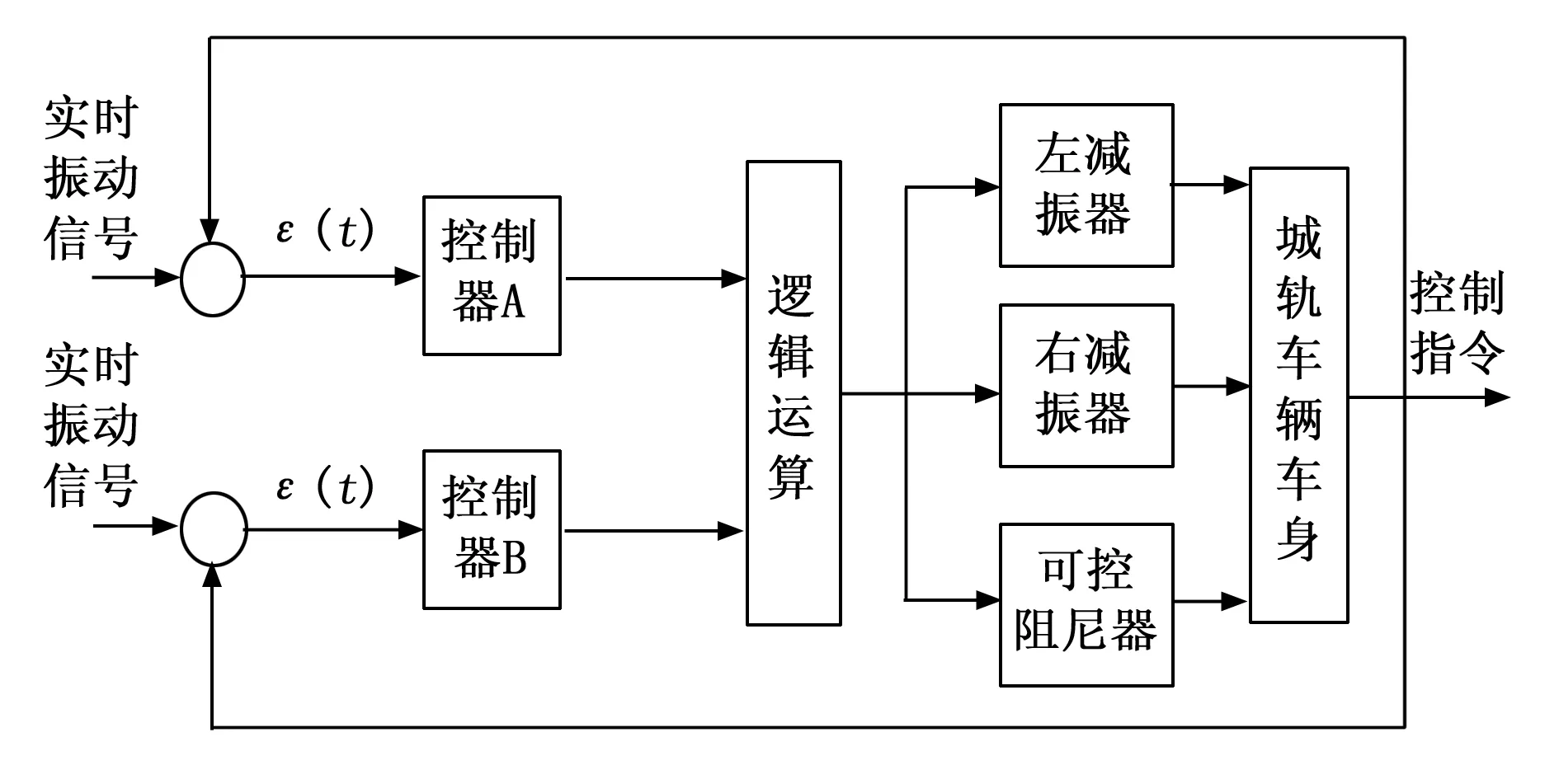
图4 城轨车辆复合结构车身减振控制框架
在实际的运行过程中,处理器输出车身振动信号数据的分析结果,将其导入到控制器中,生成相应的控制指令,在无线通信网络的支持下驱动可控阻尼器[11]。根据生成的减振控制指令,采用步进电动机来控制节流阀,通过节流阀调整节流阀的尺寸,使阻尼器的阻尼力发生变化。步进电动机的角度变化是由单片机输出的脉冲信号所决定的[12]。通过对传感器的持续取样,可以得到不同的路面激励,在需要的时候,可以根据单片机的变化来调整输出信号,并对节流孔的尺寸做出相应的反应,从而达到最佳的减振效果。
2 城轨车辆复合结构车身减振控制功能实现
此次优化设计的城轨车辆复合结构车身减振控制系统以阻尼力与振动特征之间的作用关系为理论基础,通过对当前车身振动特征的分析,确定抑制该振动信号所需的阻尼力,在此基础上,利用阻尼器以及减振控制器等设备,执行阻尼力调节任务,进而完成对城轨车辆复合结构车身振动的抑制与控制。
2.1 模拟城轨车身在不同场景下的振动过程
城轨车辆复合结构车身产生振动的原因主要是路面不平顺产生的激励,路面不平顺类型可以分为水平不平顺、高低不平顺等多种场景。路面高低不平顺具体是指城轨车辆线路轨道中心线在垂直地面方向上的高度均存在不均衡现象,主要是由路基道床捣固程度不均匀、扣件松动等原因造成的,高低不平顺场景可以量化表示为;
(4)
式中,hi和hi+1分别为城轨线路中任意节点i及其相邻节点的高度值,hl为城轨线路的高度差,也就是路面的高低不平顺程度[13]。那么路面高低不平顺程度输入到城轨车辆复合结构车身中的激励可以表示为:
(5)
式中,f和f0分别为空间频率及其参考值,γ为频率指数,将公式3的计算结果代入到式(4)中,即可得出作用在车身上的激励信号。在上述路面场景下,可以得出城轨车辆复合结构车身对路面激励的响应情况如下:
(6)
式中,υ(t)为t时刻城轨车辆的行驶速度,ω为角频率,求解结果B(t)即为城轨车辆在路面高低不平顺场景下的振动信号[14]。按照上述方式可以得出其他城轨车辆运行场景不平顺的量化转换结果以及对应场景下车身的振动响应情况。
2.2 提取城轨车身振动特征
利用传感器设备获取城轨车身的实时振动信号,提取波形、峰值、裕度等无量纲特征指标对连续振动信号和离散振动信号进行描述。上述指标能够表达出信号波形的平缓程度,能够描述信号特征变量的分布。其中振动信号波形特征的提取结果如下:
(7)
式中,|g|和grms分别为振动信号绝对值的平均值以及有效值。另外峰值、裕度以及偏度特征的提取结果可以表示为:
(8)

2.3 城轨车辆复合结构车身阻尼力调节
根据当前城轨车辆复合结构车身振动信号及其特征参数的提取与分析结果,计算当前振动状态所需的阻尼力为:
(9)
式中,g(t)为城轨车辆复合结构车身实时振动信号,Frestore和Fcompress对应的是复原阻尼力和压缩阻尼力,κdamping为相对阻尼系数[16]。按照公式(9)的计算方式,将理想车身振动信号赋值给g(t),得出城轨车辆复合结构车身的预期阻尼力,记为Fexpect(t),那么在车身减振控制过程中阻尼力的调节量为:
ΔFdamping=|Fexpect-(Frestore+Fcompress)|
(10)
将相关数据代入到公式(10)中,得出城轨车辆复合结构车身阻尼力调节量的计算结果。
可控阻尼器的简化模型计算公式如下:
(11)
式中,FCullen和Fviscosity分别为库仑力和黏滞力,δ为零场粘度,H和h为阻尼器中活塞的有效长度和通道,ψshear分别为剪切屈服强度,Spiston、Dpiston和vpiston分别为活塞面积、外径和运动速度。将车身阻尼力调节量的计算结果输入到可控阻尼器中,按照图4表示原理执行阻尼力调节任务[17]。在原有的活塞总成上增加了一个阀芯和阀体的旋转阀型阻尼调整装置,将活塞杆换成空心结构,在空心活塞杆内部安装了一个转轴,该转轴的下端连接到阀芯,改变阀体上的小孔 B、C的重合度,改变节流阀的通液区域,达到了阻尼力调节的功能。
2.4 实现城轨车辆复合结构车身减振控制
车身减振控制器的装设目的是生成减振控制任务,将其作用在可控阻尼器,驱动可控阻尼器执行阻尼力调节任务[18]。在控制系统中,以给定的数值和反馈到的偏差为输入,利用不同的影响因素,对比例、积分、微分环节进行线性组合操作,输出的控制量对受控对象进行控制。控制器的输入输出关系表述如下:
(12)
式中,ωp、ωi和ωd分别为比例系数、积分系数和微分系数,ε(t)为输入的减振控制量,该参数的具体取值与阻尼力的调节量计算结果一致。调节各控制系数的具体取值,完成减振控制器的装配[19]。
3 实验测试
对基于阻尼力调节的城轨车辆复合结构车身减振控制系统进行轨道实验,测试城轨车身的各项性能指标,然后将优化减振控制系统装车并调试控制功能,验证优化设计减振控制系统的有效性。在系统测试与应用过程中,与传统控制系统进行对比分析,检验优化设计减振控制系统是否达到预期水平。
3.1 准备城轨车辆研究对象
实验中准备的城轨车辆研究控制样本可以分为A、B、C三种型号,3种车型的主要区别是车体宽度,其中A型车是城轨车辆中宽度最大、载客量最大的车型,标准A型车的宽度和高度分别为3 m和3.8 m,车身的有效长度为22 m,实验中选择的A型车为6节编组,客运量约为5.0万人。B型车和C型车的宽度分别为2.8 m和2.6 m,车体的有效长度分别为18.5 m和18.0 m,车厢编组数量为4节[17]。准备A、B、C三种型号的城轨车辆,每个型号车辆的准备数量均为2辆,为了保证减振控制系统与城轨车辆之间的适配性,要求准备的城轨车辆研究对象的内部结构无明显形变,能够正常执行运输任务,且具有无线网络通信接口。
3.2 布设硬件设备与振动测点
根据基于阻尼力调节的城轨车辆复合结构车身减振控制系统中硬件设备的使用情况,在实验环境中安装相关的硬件设备,需要安装的硬件设备包括阻尼器、控制器、传感器等。以阻尼器的装配为例,通过使用阻尼器外壳、活塞单元和活塞杆装配减振器装置,将减振器活塞上的励磁线圈用排绕式缠绕方法,在活塞的凹槽上涂一层绝缘涂料,待油漆干燥,再用绝缘纸包裹住第一个线圈,当一层缠好后,再用绝缘纸进行绝缘。每个挖槽缠绕线圈400匝,总电阻14 Ω[18]。系统中的传感器除了用来采集车辆运行数据,还用来检测车身的实时振动信号,从而验证系统的减振控制效果。在城轨车辆复合结构车身范围内设置12个测点,实验要求的检测信号包括:车身阻尼力和振动信号,其中阻尼力传感器选择范围为±600 kg的压力传感器,6 024 E型数据采集卡实现了传感器信号的采集[19]。利用高尺校准技术对硬件进行了处理,在传感器设备装配与调试完成后,将其安装在城轨车辆复合结构车身的测点位置上。按照上述方式对系统中的其他硬件设备进行组装,并安装在对应位置上。
3.3 选择城轨车辆运行场景
此次系统测试实验选择的运行场景分别为水平不平顺轨道和高低不平顺轨道,实验中使用的水平不平顺轨道在同一横截面上左右两轨顶面之间的高度差值为1.5 mm,水平不平顺轨道的长度为3.5 km。而高低不平顺轨道沿钢轨长度方向在垂直方向上存在1.0 mm左右的凹凸情况,高低不平顺轨道长度为2.8 km。在上述运行场景中,车辆研究对象的负载重量为最大载客量的二分之一。
3.4 生成城轨车辆复合结构车身振动样本
在未启动车身减振控制系统的情况下,驱动城轨车辆行驶,利用传感器设备获取各个测点的振动信号。测点1位置上收集到的振动信号如图5所示。
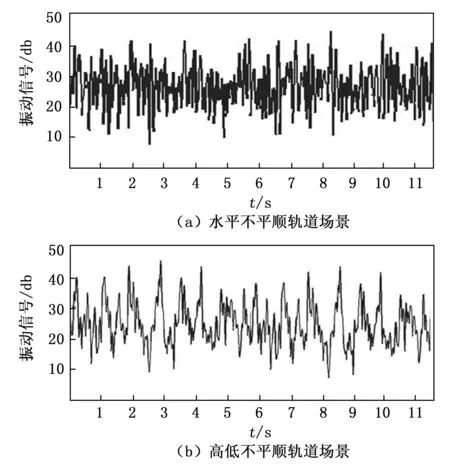
图5 城轨车辆复合结构车身振动响应波形图
按照上述方式可以得出车身上所有测点的振动信号样本生成结果。
3.5 设置系统减振控制功能测试指标
此次实验分别设置阻尼力调节量控制误差、振动信号频率以及振动信号幅值作为系统减振控制功能的量化测试指标,其中阻尼力调节量控制误差指的是实际作用在车身上的阻尼力调节量与阻尼力调节量理论值之间的偏差,其数值结果如下:
(13)
(14)
式中,nloop和ΔTtest分别为振动的循环次数和测试时间,gmax和gmin对应的是车身振动信号的正向峰值和负向峰值。最终计算得出阻尼力调节量控制误差越小、振动频率和振动幅值越小,证明对应系统的车身减振控制功能越优。
3.6 系统测试过程与结果分析
测试程序在多层次的振动测试及分析平台环境下开发,用于数据的接收、处理、显示和存储。首先对系统进行初始化,同时开启硬件和软件系统并驱动城轨车辆,当不平顺路面给系统一个激励信号后,得出阻尼力调节量的理论值,并将运行信号输入到主测计算机,由主测计算机根据软件的控制规律,生成相应的控制信号,然后作用到阻尼器上,通过阻尼力调节来实现对城轨车辆复合结构车身的减振控制。减振控制系统的执行结果如图6所示。
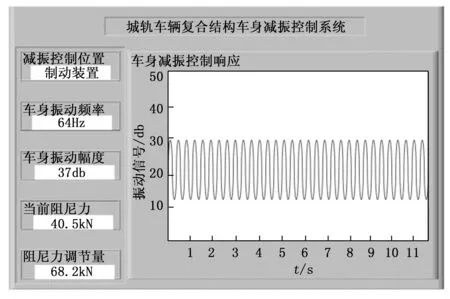
图6 优化设计城轨车身减振控制系统执行界面
为了体现出阻尼力调节技术在城轨车辆复合结构车身减振控制系统中的应用优势,设置文献[2]方法、文献[3]方法作为实验的对比方法,按照上述方式进行系统的开发与运行,得出对应的减振控制执行结果。通过相关数据的统计与分析,得出反映系统阻尼力调节量控制误差指标的测试结果,如表1所示。
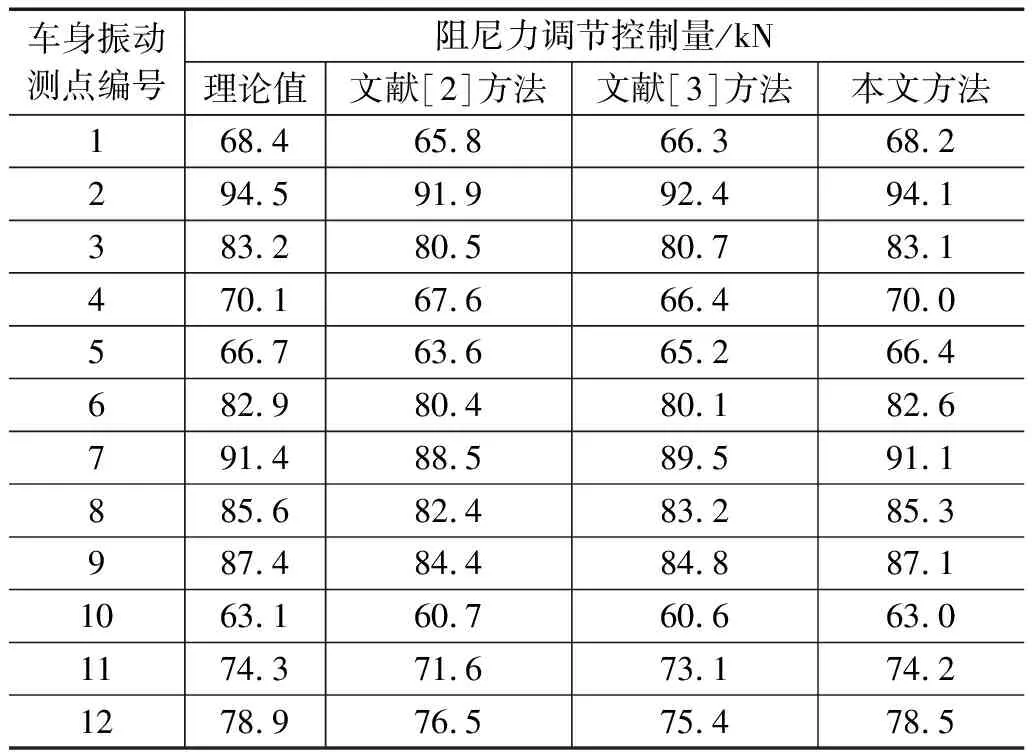
表1 系统阻尼力调节量控制误差测试对比结果
将表1中的数据代入到式(13)中,得出文献[2]方法、文献[3]方法的平均阻尼力调节量控制误差分别为2.72 kN、2.4 kN,而本文方法的阻尼力调节量控制误差的平均值为0.24 kN。这是因为文献[2]方法、文献[3]方法未对车身阻尼力调节量的理论值进行计算,调节量控制误差较大。而本文方法根据车身的振动特征,计算了车身阻尼力调节量的理论值,根据该理论值执行可调阻尼力调节任务,因此阻尼力调节量控制误差较小。
提取系统减振控制下的车身振动信号,经过公式(14)的计算,得出反映系统减振控制效果的测试结果,如图7所示。
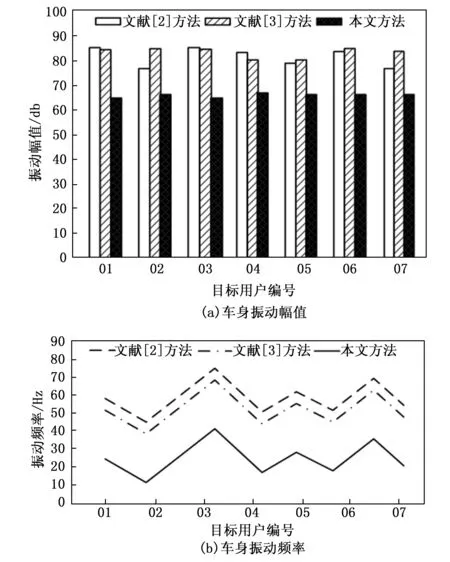
图7 系统减振控制效果测试对比结果
从图7中可以直观地看出,文献[2]方法作用下车身振动信号的频率和幅值分别为82 Hz和64 dB,本文方法控制下车身振动信号的频率和幅值分别为64 Hz和37 dB,由此可见与传统系统相比,优化设计系统控制下振动信道的运行参数得到明显降低,即优化系统在减振控制功能方面具有明显优势。
4 结束语
通过研究发现城轨车辆运行振动是影响其运行安全程度以及使用寿命的重要指标之一,因此对车身振动进行控制具有较高的现实意义。本文提出基于阻尼力调节的城轨车辆复合结构车身减振控制系统。建立了城市轨道交通车辆的复合结构模型,并提取了其振动特性,以可调式阻尼器为执行器,完成可调式阻尼调节,通过系统减振控制器实现对城市轨道车辆复合结构车身振动的控制。实验结果表明,应用该系统有效提高了对车身的减振控制效果,对于城轨车辆的维护以及管理具有较高的应用价值。
