基于弱磁探测技术的高压海底电缆精确定位系统设计
2023-08-30祝建军戴显康陈露露黄城
祝建军,戴显康,陈露露,黄城
(1.中国三峡新能源(集团)股份有限公司江苏分公司,南京 210019;2.三峡新能源南通有限公司,江苏 南通 226001;3.三峡新能源如东有限公司,江苏 南通 226400;4.江苏方天电力技术有限公司,南京 210000)
0 引言
电缆具有内部供电、外部绝缘的显著特点。由于国民经济的快速发展,城市的用电量日益增加,社会对用电安全的要求也日益提高,一些老式的线路已无法适应市场的需要。因此,国家电网实施了一系列的城市电网改造工程,由于地面和海底环境的干扰要比传统的架空线路少,所以在国家电网的改造中,采用海底电缆取代原来的架空线路是一项重大工程。海底电缆可能会受到化学腐蚀和水下生物的侵袭[1],在敷设或修理过程中,海底电缆由于自身重量、水深和安装装置的影响,会承受较大的机械应力,还会受到船只抛锚、捕鱼网具等外力的破坏。为了保证海底电缆的正常运行,并为海底电缆的维修以及改装提供参考,设计并开发了高压海底电缆精确定位系统。
现阶段已有相关领域学者对高压海底电缆精确定位系统做出了研究。文献[2]提出基于反射系数谱的电缆定位系统。结合电缆分布参数模型及精细频谱分析、Kaiser窗、距离窗处理技术详细阐明了反射系数谱定位方法的基本原理,然后对不同损伤程度的电缆缺陷进行建模定位仿真。文献[3]提出基于时间反演相位法的电缆定位系统。利用Matlab建立电力电缆频域模型,利用双指数脉冲模拟实际局放信号,并分别从仿真和实验的角度验证了该方法的可行性。
上述现有的高压海底电缆精确定位系统在实际运行过程中存在定位误差大的问题,为此引入弱磁探测技术。弱磁探测技术是结合海底电缆在不同运行状态下的磁场分布特征和结合当前磁场环境中的信号特征,采用特征匹配的方式判断当前磁场的分布状态,进而得出高压海底电缆运行状态特征,得出高压海底电缆的精准定位结果。将弱磁探测技术应用到高压海底电缆精确定位系统的优化设计工作中,以期能够提升系统的电缆定位精度。
1 高压海底电缆精确定位硬件系统设计
1.1 海底弱磁探测器
优化设计的高压海底电缆精确定位系统中使用的弱磁探测器为磁通门传感器,该传感器采用在被测磁场中具有高磁导率的软磁体,在交流磁场饱和激励作用下,对微弱磁场进行检测。采用这种方法制作的磁通探针,尽管形状不同,但都符合 EMR规律。它的磁场测量实际上是一种调制和解调的过程。把被测的磁场信号转换成相应的电信号,再通过磁通信号处理电路将其转换成能够反映出磁场强度的电信号,最终测量出该电信号的幅度,从而获得与之相适应的磁场信号。整个磁通门传感器由偏压置零电路、滤波电路、放大器电路等部分组成,其工作电路如图1所示。
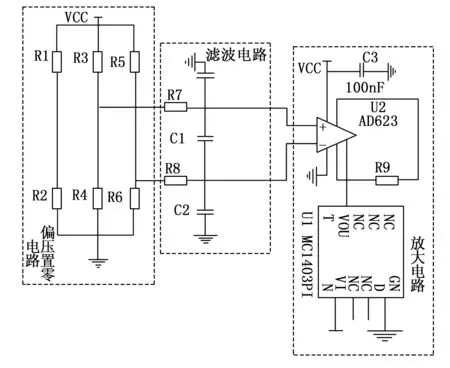
图1 磁通门传感器工作电路图
将配置的海底弱磁探测器安装在待测高压海底电缆附近,并将其与供电电流相连。选择LMZ34002型号的电源作为海底弱磁探测器的供电电源,其输入电压为4.5~40 V,可调节-3~-17 V,最大输出电流为2 A,工作温度为-40 ℃,最高为80 ℃,适用于海洋工作环境,并设有过流保护。
1.2 高压海底电缆精确定位器
改装高压海底电缆精确定位器的定位原理是:在交流磁场中,弱磁探测器会在不同的位置产生不同幅度的感应电动势,画出电势的幅值分布,从而形成一个振幅检测。测量信号的波形有峰值和低谷两种,分别是用来测量线圈的峰值,用切线测量的方法来确定电缆的位置[4]。高压海底电缆精确定位器的改装结构如图2所示。
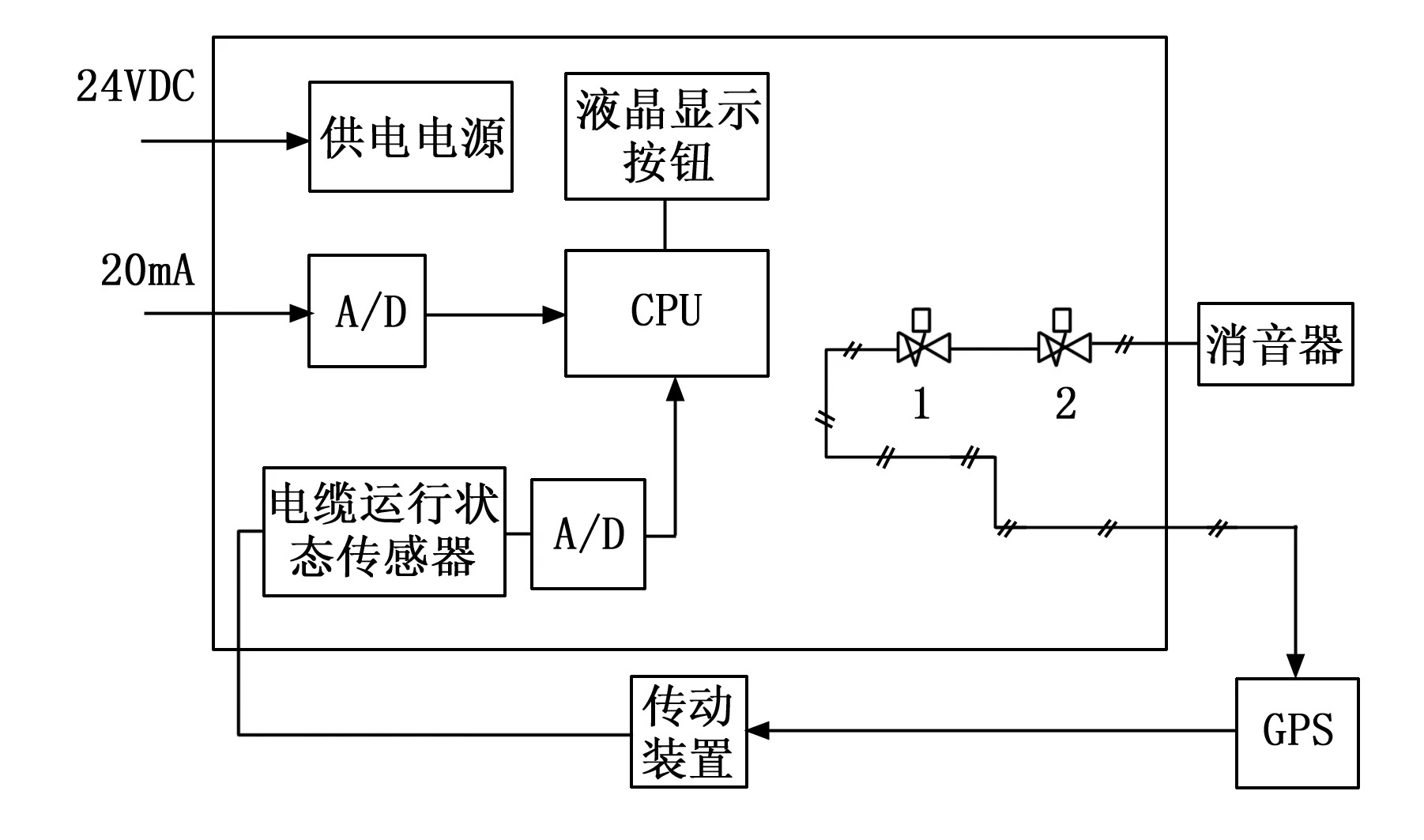
图2 高压海底电缆精确定位器结构图
高压海底电缆精确定位器由电缆运行信号采集、信号耦合、信号匹配等部分组成,其中电力线耦合器的衰减主要是由线路上的阻抗失配造成的。耦合器件的负荷阻抗相当于它们的接入点处的功率线阻抗。与电感器耦合相比,电容耦合是一种直接耦合,信号的产生和传输线之间的耦合得到了较好的信号,具有理想的传输特性和较小的信号衰减。由于工频电流在经过耦合电容器时会产生较大的压力损失,所以,与滤波器相结合的变压器工作电压要比输电线路的电压要小得多,从而方便了电路的设计与实施[5]。高频信号的输入、输出和电源接入点由一个高频电容构成,它是一种将高频信号直接输入到电网中的直接耦合器件,并通过电源线接收高频信号。高频电容器的一端与电源线路相连接,另一端与耦合的变压器相连接。该耦合电容器是一种高压电容器,它将高频信号与高压工频绝缘起来。耦合变压器要把2.6 V的电压提升至30 V,不但起到绝缘的作用,而且还能实现信号的平衡和阻抗的转换。滤波器中变阻器和暂态抑制二极管主要用于保护电网的强干扰和过电压。按照系统需要对高压海底电缆精确定位器中的其他元件进行改装,最终通过对元件的装配,得出高压海底电缆精确定位器的改装结果。
2 高压海底电缆精确定位系统软件功能设计
2.1 构建高压海底电缆及其磁场等效模型
高压海底电缆由管状支撑物、导体层、热绝缘层、电气绝缘层、电缆屏蔽层和保护层等部分组成,高压海底电缆所处的海底环境中,认为海水的导电系数在3~5 S/m之间,其导电性能取决于所含离子的浓度和活性,也就是海水的水温和含盐度。在水温10 ℃,含盐量为3%的情况下,海水的导电系数为3.32 S/m。由于海水的温度和含盐度没有明显的改变,所以可以认为海水的电导是比较稳定的[6]。假定高压电缆在z轴上放置,孔缝所在的平面与z轴垂直,在P点,电流沿着z方向流动,不需要开孔,电流就可以穿过。由于电磁波在漏缆传播过程中,外导体上z处的孔缝两边的电场会随时间而变化,变化规律如下:
(1)
式中,变量κc为高压电缆产生位移电流的传播系数,E为高压海底电缆产生电场的电动势,最终得出的计算结果Idisplacement为高压海底电缆产生的位移电流[7]。由于高压海底电缆中位移电流的存在,造成电缆孔缝处的电磁波向外辐射电磁能量。形成的海底电磁场分布特征如图3所示。
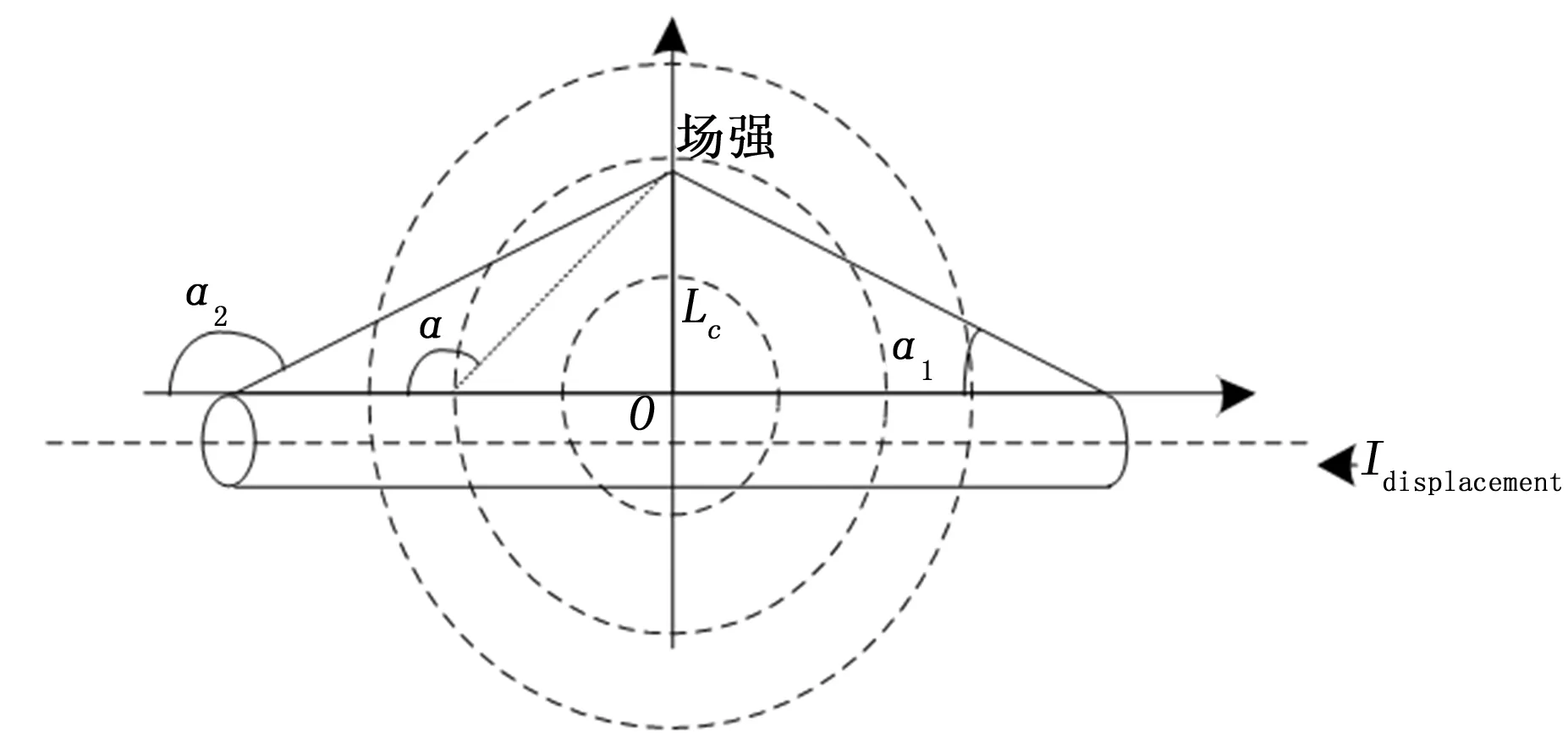
图3 高压海底电缆磁场分布图
根据基尔霍夫定律可得高压海底电缆的电场运行关系如下:
(2)
式中,变量x和Δx分别表示高压海底电缆在流体运动作用下的水平位置及位移量,U(x)和I(x)表示高压海底电缆的额定电压和电流值,变量y和z的求解公式如下:
(3)
式中,G、C、K和W分别表示高压海底电缆单位长度的导纳、电容、阻抗和电抗[8]。根据毕奥萨法尔定律,可以得出高压海底电缆磁场环境中任意一点的磁场大小为:
(4)
式中,Lc为磁感应距离,B为磁感应强度,ηmagnetism为真空磁导率。高压海底电缆在三维环境中满足如下方程:
(5)
式中,λm为磁场标量磁势。结合高压海底电缆组成结构、电场工作原理以及磁场产生原理3个部分,得出高压海底电缆及其磁场等效模型的构建结果[9]。并得出高压海底电缆在不同运行状态下磁场的分布与变化特征,以此作为判断电缆位置与状态的对比标准。
2.2 采集高压海底电缆实时运行状态数据
在对海底电缆进行检测时,通过测量到海缆产生磁场在三轴方向上的磁场分量大小与方向,根据一定的算法即可反演推算出海缆的方向角度,结合GPS数据可推导出设备与海缆的距离值[10]。因此有必要对高压海底电缆实时运行数据进行采集,其中高压海底电缆的单相电缆回路电感数据的采集结果为:
(6)
式中,I和ψe分布表示海底电缆的实时电流和磁链总量。若高压海底电流的回路组成数量为3时,三相工作电缆数据的采集结果可以表示为:
(7)
式中,变量IA、IB和IC分别为高压海底电缆的三相电流,Qii为第i相自感,Bij为第i和j相之间的互感。同理可以得出高压海底电缆任意时刻的运行状态数据采集结果。为避免信号在后续的处理和运算中出现溢出现象,必须对信号进行去平均和归一化,从而使信号幅度达到相同的程度,从而有利于特征提取和目标识别[11]。去平均和标准化处理的公式如下:
(8)
式中,xavg为初始采集电缆运行数据的平均值,x(n)为运行状态数据的初始采集结果。经过上述流程完成系统的电缆实时运行状态数据采集与处理工作。
2.3 利用弱磁探测技术获取海底电缆周围弱磁信号
在地磁环境下,根据弱磁信号与海底电缆运行状态之间的关系,利用弱磁探测技术采集弱磁信号。图4为弱磁探测技术的工作原理。
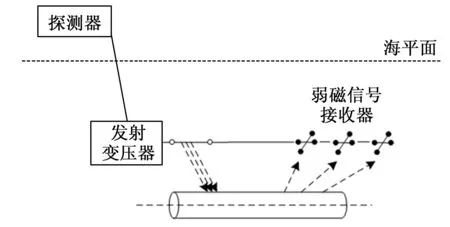
图4 弱磁探测技术原理图
经过传感信号的处理得出传感器的输出电压为:
Uout=Upartial+Umagnetic
(9)
式中,Upartial和Umagnetic分别为偏置电压和磁场引起的输出电压。假设磁通门传感器中探头感应线圈的有效面积为:
(10)
式中,Ssection为感应线圈截面积,hcoil和dCable,x分别为线圈高度以及线圈与待测电缆之间的水平距离。由此可以得出磁通门传感器的线圈磁通量为:
χ=BS
(11)
将式(4)和式(10)的计算结果的代入到式(11)中,得出线圈磁通量的计算结果[12]。在法拉第电磁感应定律的支持下,得到传感器在电缆周围的感应电动势输出结果为:
(12)
式中,ηc为磁导率,I0和f0对应的是注入电流和频率,nline为感应线圈的匝数。最终传感器的输出结果即为海底弱磁信号的探测结果。如果高压海底电缆与探测点之间的距离超过其物理尺寸的三倍,则可以将高压海底电缆等效为磁偶极子,其量化表达式如下:
(13)
式中,dprobe为探测器与高压海底电缆之间的距离,Lprobe为单位体积的磁偶极矩,最终的求解结果即为磁偶极子在测量点位置上的磁感应强度[13]。假设球体的掩埋深度为hBurial,其磁化强度为Wc,则磁异常空间域的正演方法得出海底弱磁探测器的磁信号采集结果为:
(14)
式中,ζ和θ分别为磁化倾角以及剖面与磁化强度水平投影的夹角,dc为磁矩,变量r的求解公式如下:
(15)
式中,xdetector和ydetector分别对应的是探测器安装的位置坐标。在实际的磁信号探测处理过程中,系统在上电源后,系统必须进行一次重置,以保证AD7705能正常工作[14]。接着,AD7705的信道1被选定为输入模数信号。然后,将时钟寄存器配置成在50 Hz刷新率下工作。继续把数据写入通信寄存器,把信道1用作一个有效信道,然后重新配置一个设定寄存器,以便它启动自校正运算。在这个过程中,通过单片机对AD7705的状态寄存器进行查询,以确定它是否准备好了数据的输出[15]。当发现数据寄存器已准备好时,由AD7705的数据寄存器进行数据的读出;如果没有,那么就返回,并在数据被读入之前继续进行查询[16]。为了减少干扰对磁场信号的影响,在优化设计中引入了一种新型的数字滤波器。在收集到的大量数据中,经过程序判定剔除出最大和最小的不可靠数据,并对该时段的数据进行求和,最后用该平均值作为该时段的有效数据,从而消除了干扰,提高了采样信号的可信性。
2.4 实现高压海底电缆精确定位功能
在已知高压海底电缆弱磁探测器位置的情况下,根据采集的电缆运行状态数据和弱磁信号,确定高压海底电缆的位置。高压海底电缆与探测器之间方向角的测定结果如下:
(16)
式中,κ为磁信号在海底环境中的传播系数,dz表示的是阵元间距,Δφx为阵元间的相位差[17]。根据磁信号的传输特征,可以得出海底电缆与探测器之间的距离为:
Ltesting=κ·Δt
(17)
式中,变量Δt表示的是磁信号的传输时间。那么高压海底电缆的精确定位结果可以表示为:
(18)
其中:(xdetector,ydetector,zdetector)为弱磁探测器的安装位置,θx、θy和θz分别表示的是海底电缆与探测器夹角在x、y和z三个方向上的分量。考虑高压海底电缆的布设长度,确定高压海底电缆中任意一点的定位结果[18]。除此之外,根据弱磁信号的采集结果,判断高压海底电缆是否存在故障,并确定高压海底电缆中故障点的精确位置定位结果。
3 系统测试
为了测试基于弱磁探测技术的高压海底电缆精确定位系统的定位功能,以白盒测试作为系统测试原理,采用对比测试的方式得出优化设计系统在定位功能方面的优势。系统测试使用的白盒测试是在已知测试结果的情况下运行系统,并对比系统实际输出结果与已知结果之间的差距,从而验证优化设计系统的运行性能[19]。根据高压海底电缆的运行状态,将系统测试分为静态测试和动态测试两个部分,其中静态测试就是在高压海底电缆不执行输电任务的状态下,测试系统的定位精度,而动态测试则是控制电缆对象执行输电任务,并在任务执行过程中启动系统定位程序,得出海底电缆的定位输出结果。通过静态测试与动态测试,保证优化设计的高压海底电缆精确定位系统能够适应高压海底电缆的多种运行状态。另外,为了检验优化设计系统在定位功能方面的优势,设置传统的基于反射系数谱的定位系统以及基于时间反演相位法的定位系统作为实验的对比系统,在相同的实验环境下实现多系统的开发。
3.1 选择高压海底电缆研究对象
此次系统测试实验选取一段典型的35 kV单芯电缆作为实验对象。整段电缆被弯曲成一个圆环形成电流回路,整个电路被塑料底座垫高,距离地面0.2 m。系统测试实验选择电缆对象的结构及工作原理如图5所示。
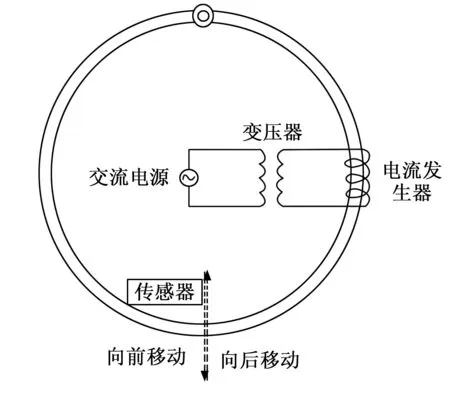
图5 电缆研究对象结构与工作原理图
电缆中通过大电流发生器产生有效值为500 A,电缆相当于只有一匝的二次绕组,可以通过提高大电流发生器一次侧绕组的匝数,在电缆内部产生低压大电流。从结构方面来看,选择的电缆对象由外护套、包带、铜金属层、外半导体层、绝缘以及铜导体等元件组成,其中外护套、包带和绝缘的相对介电常数设置为2.7,其余组成部件的相对介电常数均为1.0,铜金属层和铜导体电导率为58*106S/m,外半导体层电导率为1 000 S/m,其余部件的电导率均为0 S/m[20]。在保证准备电缆无放电故障的情况下,将其放置到海底环境中,并记录高压电缆的放置位置。部分高压电缆研究对象的位置设置情况,如表1所示。
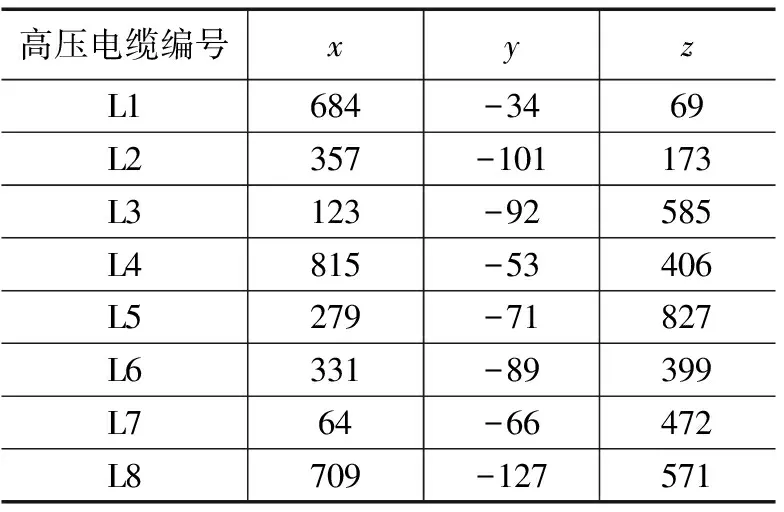
表1 高压电缆位置设置表
由于电缆的设置位置始终处于海平面以下,所以电缆位置信息中y值始终为负,y的绝对值即为电缆的下放深度。表1中任意两个相邻坐标之间的单位长度为1 m。按照表1方式对实验中的所有高压电缆研究对象的位置进行记录,以此作为系统定位精度的比对标准。
3.2 调试系统硬件设备
将硬件系统中的磁通门传感器、定位器等设备与程序控制器相连,定位器上共设置4个馈电端口,其中同侧的两个端口分别接信号发生器和示波器,其他两个端口全部接 50 Ω 的匹配负载,以减少信号的反射。设置系统磁通门传感器的坐标轴数为3,量程区间为[0.8 μΤ,250 μΤ],电信号与磁信号转换比设置为1/25 V/μΤ。按照上述方式对系统中其他硬件设备的运行参数进行设置。
3.3 安装磁场屏蔽装置
为了降低实验环境中其他设备产生的磁信号对实验结果产生的影响,需要安装磁场屏蔽装置。实验环境中空间均匀分布的磁力线,在遭遇高磁导率的环状物质时,会在材料的表面产生扭曲,然后再向内渗透,就像“光的路径最短”一样,磁力线的阻力也是最小的,因为磁力线的阻力要大于物质的阻力,磁力线会从物质的表面通过,而不是通过内部的空气,因此圆环中的磁力线很少,这样就能起到磁屏蔽的作用。实验中安装磁场屏蔽装置的直径和高度均为65 cm,层数为5。在磁场屏蔽装置的作用下,产生一个低于5 nT的弱磁环境,磁感应强度比较均匀。
3.4 设置高压海底电缆定位精度测试指标
此次系统测试实验设置电缆定位误差作为实验的量化测试指标,其数值结果如下:
ε=|xCable-xset|+|yCable-yset|+|zCable-zset|
(19)
式中,xCable、yCable和zCable为系统的输出结果,该变量的具体取值可由公式(18)计算得出,(xset,yset,zset)表示高压海底电缆的实际位置坐标,可通过表1的位置设置情况确定(xset,yset,zset)的具体取值。最终计算得出定位误差ε的值越大,证明对应系统的定位功能越差。
3.5 系统测试过程与结果分析
3.5.1 静态定位
高压海底电缆布设完成后,利用电网控制设备停止输电任务的运行,将高压海底电缆的运行状态调整至静止状态。启动系统定位程序,利用弱磁探测技术得出海底环境中的磁场分布情况,如图6所示。
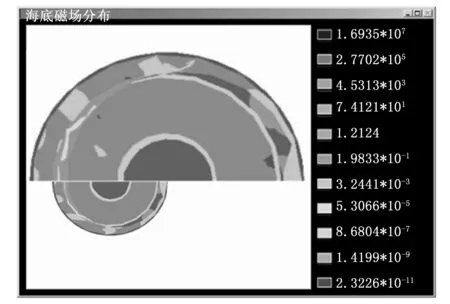
图6 海底磁场分布探测结果
根据图6表示的弱磁探测结果,通过信号匹配以及坐标计算等步骤,得出高压海底电缆的定位结果,并以可视化的形式输出。其中L1号电缆的定位输出结果如图7所示。
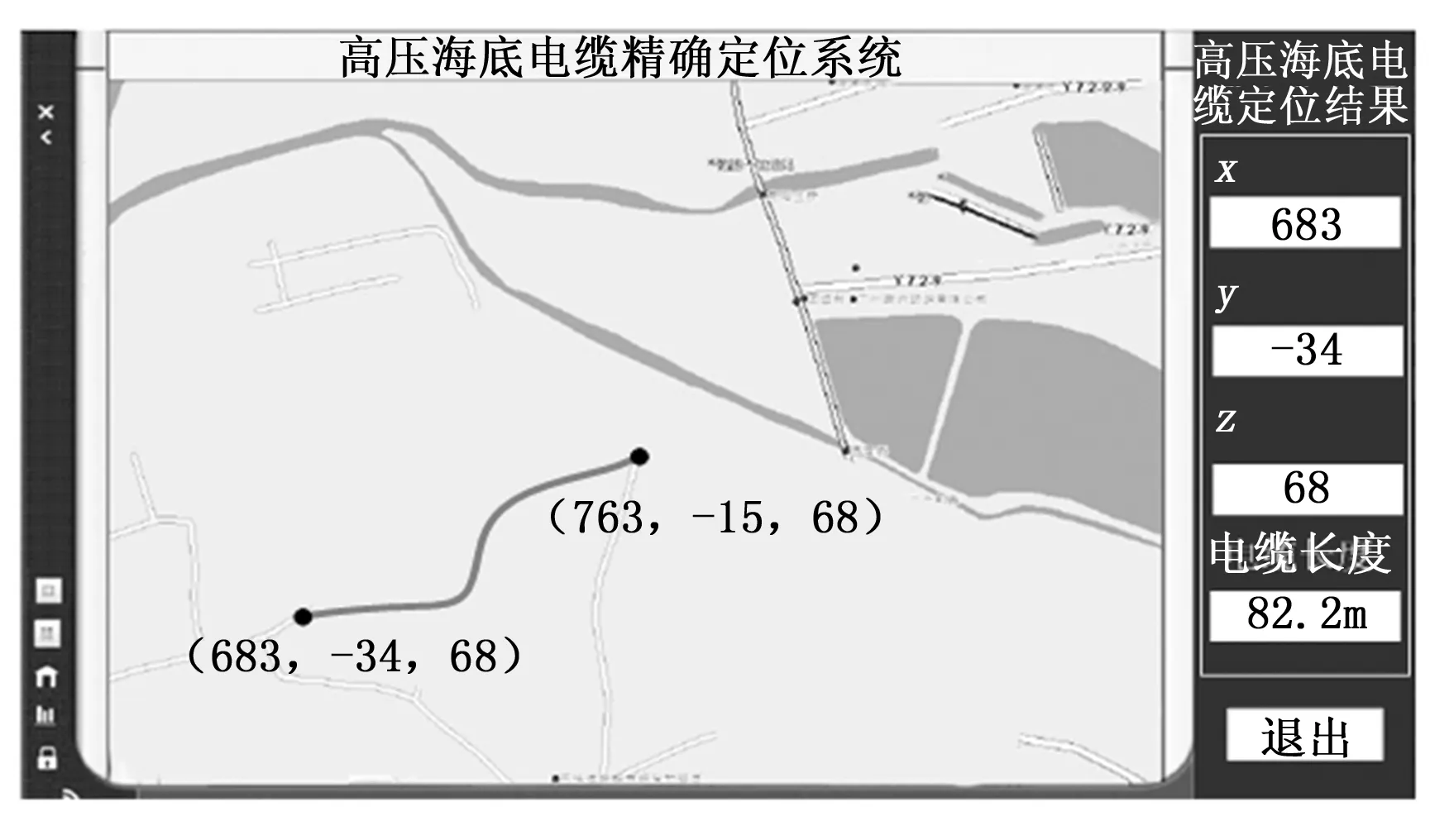
图7 优化系统高压海底电缆精确定位结果
同理可以得出其他高压海底电缆的定位结果。按照上述流程对开发并运行对比定位系统,得出相应的定位结果。通过相关数据的统计,得出静止状态下高压海底电缆的定位结果,如表2所示。
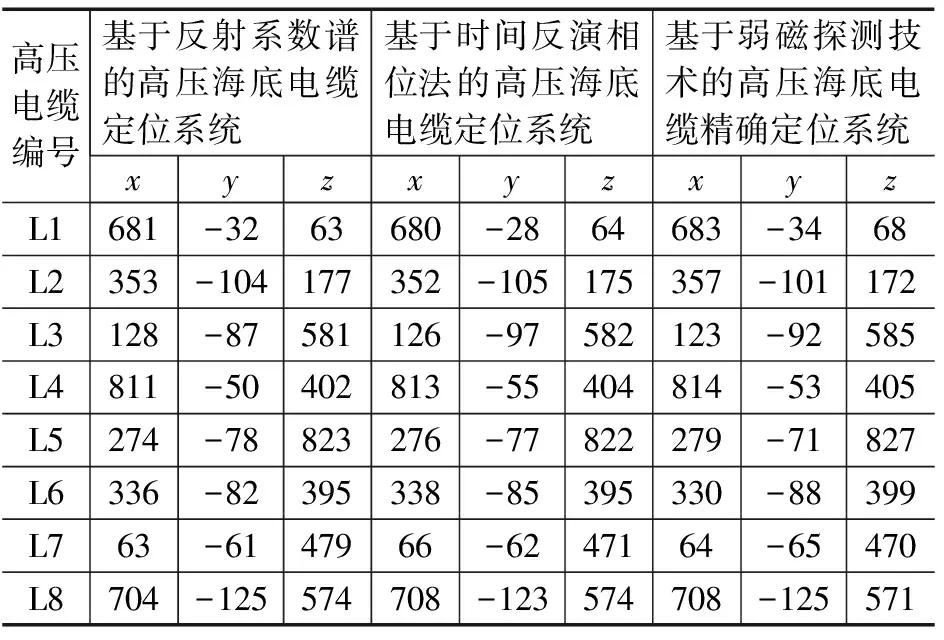
表2 高压海底电缆静态定位数据表
将表1与表2中的数据代入到式(19)中,得出对比系统的平均定位误差分别为12.75 m和10.88 m,而优化设计的基于弱磁探测技术的高压海底电缆精确定位系统的平均定位误差为1.00 m。
3.5.2 动态定位
在不改变高压海底电缆位置的前提下,利用控制器设备将电缆调整至输电状态,单位时间内电缆的输电总量为15 kWh。按照相同的方式运行定位系统,得出相应的定位数据结果。经过式(19)的计算,得出反映系统定位功能的测试对比结果,如图8所示。
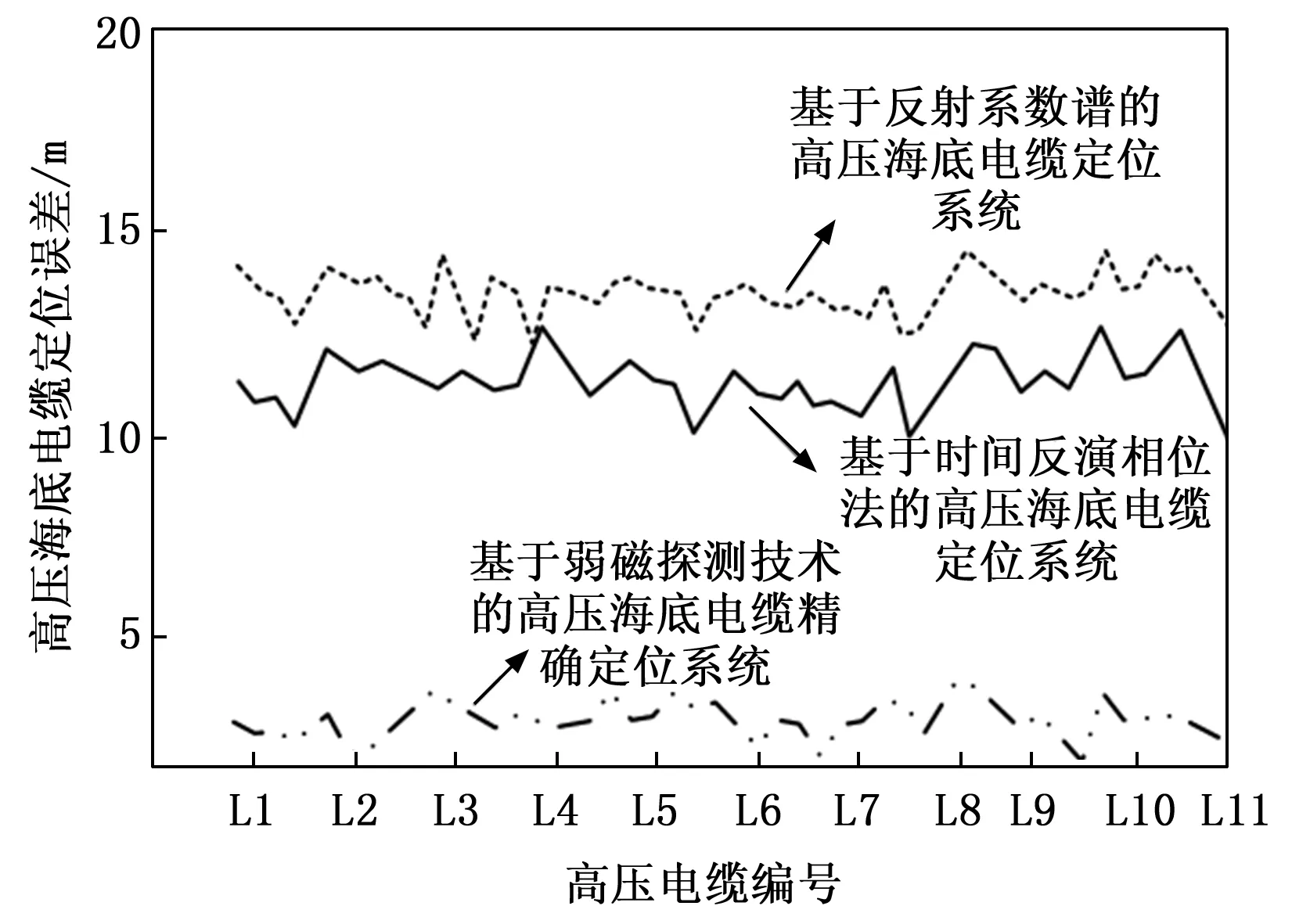
图8 动态高压海底电缆定位误差测试对比曲线
从图8中可以直观地看出,优化设计系统的定位误差始终低于对比系统,通过平均值计算,得出传统系统定位动态电缆的平均误差分别为13.68 m和11.46 m,而优化设计系统的平均定位误差为1.20 m。
4 结束语
高压海底电缆精确位置监测对保障海洋环境安全和电网稳定运行具有重要意义,在电力装备的制造过程中应考虑各种海底电缆精确位置监测技术的应用,实现高质量、高可靠地对海底电缆位置进行准确监测。通过弱磁探测技术的应用,获取高压海底电缆周围的磁场信息,并根据电磁关系,确定高压海底电缆的精确定位结果。通过系统测试实验与结果分析,证明了优化设计系统在定位精度方面的优势,即优化设计系统具有更高的实际应用价值。在高压海底复杂环境中构建一个完善且有效的海下电磁波环境测量及检测系统,能够提高高压海底电力电缆环境信息质量,对电力线路安全运行具有重要意义。
