车体360°动态图像智能检测系统研究
2023-08-29邓春林李文宝刘备陈晓亮陈元
邓春林,李文宝,刘备,陈晓亮,陈元
(1.南昌轨道交通集团有限公司运营分公司,江西 南昌 330038;2.成都唐源电气股份有限公司,四川 成都 610046)
南昌轨道交通自2009 年开工建设以来,目前已开通运营2 条地铁线路,运营里程60.35kM,其中1 号线和延长线39 列车,2 号线和南延线34 列车,3 号线32列车,4 号线46 列车,总计151 列车。目前地铁电客车都是在每日运营结束后入库检修,检修模式为传统的地沟人工检修,主要的手段是通过简单测量工具及手电等工器具按照车辆检修规程规定的内容对列车进行检测,此种检修方法效率极为低下,同时检修效果完全依靠工人的经验,浪费了大量的人力和物力,工作效率低、劳动力耗费巨大,漏检率高。智能化、信息化的车体360°在线智能检测系统的运用,可将安全方面的工作提升到全新的水准。
1 系统整体架构设计
车体360°动态图像智能检测系统主要包括轨旁设备和DCC 设备。其中,DCC 设备包括数据服务和客户端,数据服务用于接收轨旁设备采集、处理完毕后的检测数据,同时写入数据库,并为客户端提供Web 服务,客户端用于接入数据服务器,完成实时数据查看、实时报警、数据查阅和缺陷管理等功能;轨旁设备主要包括车侧检测模块、车体及车号检测模块、车顶检测模块、车底检测模块和轨旁控制机柜,如图1 所示。
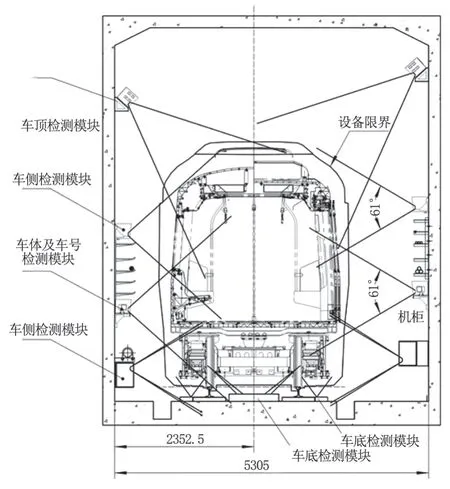
图1 系统整体架构
检测模块设计如下。
车底检测模块包括线阵相机、3D 相机、面阵相机和红外相机四种成像设备组成的车底成像模块,如图2 所示,其中线阵相机与3D 相机一体化封装、面阵相机与红外相机一体化封装,以实现线阵相机与3D 相机共用线激光并同步触发;面阵相机与红外相机视野重合,同步触发且帧率一致,使得面阵成像与热成像对应。面阵红外一体化封装模块包括面阵相机、频闪光源、红外相机、同步触发电路板,如图3 所示。
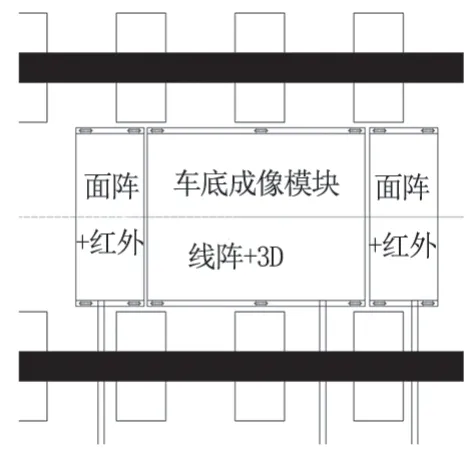
图2 车底成像模块
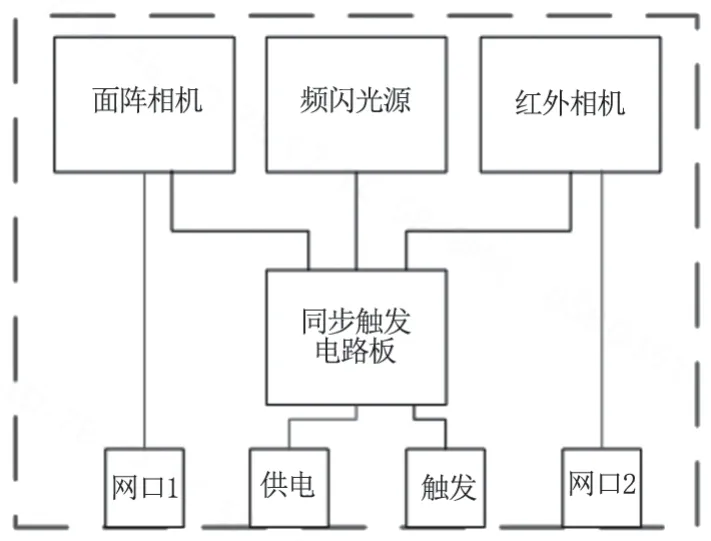
图3 面阵红外一体化封装模块
车侧检测模块采用,为线阵相机、3D 相机和线激光一体化封装的TY-IMG-2D3D 模块,以实现线阵相机与3D 相机共用线激光并同步触发,如图4 所示。当雷达探测到列车来车,控制电路获取来车信号,触发TY-IMG-2D3D 开始采集数据。
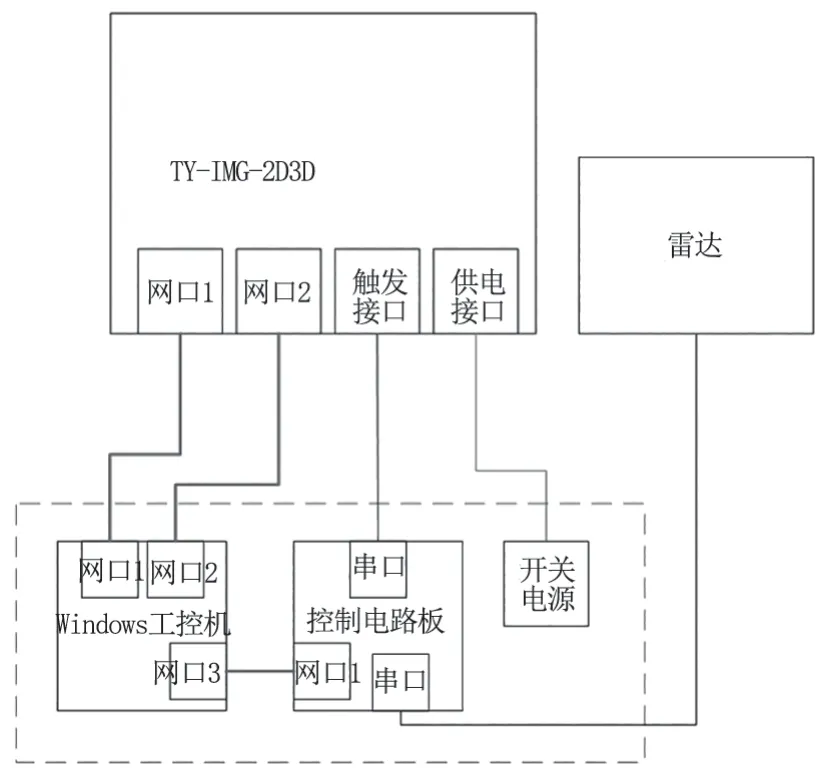
图4 TY-IMG-2D3D 组件
车体检测模块和车顶检测模块采用特殊设计的TYIMG-2D 组件,TY-IMG-2D 组件包括线阵光源一体化模块用于接入TY--CAL-TX2 采集。
通过TY-IMG-2D 组件、TY-IMG-2D3D 组件和面阵红外一体化模块的一体化封装设计,实现三者同步触发采集列车车体动态图像,从而自动识别列车车顶、车体、车侧、车底转向架、车钩、轮对、闸瓦、牵引装置、电机、基础制动装置、齿轮箱、风缸等关键部件的缺失、松动、脱落、异物、划痕故障报警。
通过以上检测模块设计使得车体360°动态图像智能检测系统,可实现列车不停车自动检测,覆盖了不低于80%的人工车下无电日检作业和95%轮对尺寸测量作业,同时可获取大量的检测数据,通过大数据分析和智能挖掘,对异常情况发出警报,方便及时检修车辆。该智能系统具备可扩展性,可接入地铁车辆中大部分的检修设备,并建立地铁车辆的大数据库,深度分析各个设备,为车辆的高级修程提供数据基础,为后续的均衡修、状态修提供依据,同时对保障车辆安全也起着重要的作用,从而实现车辆从传统的日检到双日检、四日检、八日检,实现车辆检修向检修智能化、自动化发展,延长修程时间,降低人力物力成本。
2 软件设计
系统软件设计应当包括设备控制单元、现场数据采集及处理单元、状态中心服务单元、系统维护单位及远程数据中心。
设备控制单元主要完成对雷达、激光传感器、相机、光源的触发拍照。上述检测模块通过各自板卡将数据发送到控制服务,控制服务根据触发模块发送的触发信号判断开始检测,并触发光源、相机等模块,从而实现现场数据采集。现场数据采集及处理单位,根据设备控制单元发送的指令,驱动线阵相机、3D 相机、面阵相机、红外相机同步采集并归档存储数据,调用车号识别算法,对采集和存储的数据进行车号自动识别。通过检测数据上传单元将现场采集处理后的数据传到远程控制中心和状态中心服务单位进行实时数据和状态展示。
3 系统设计
3.1 来车触发子系统
来车触发子系统主要用于设备来车启动功能及车离开关闭功能,主要由短波雷达、线阵成像模块及信号处理控制模块组成,如图5 所示。来车启动功能指当雷达探测到车辆到来的速度信号,由信号处理模块发送启动信号,启动车辆360°检测系统的前端相机、光源,开始采集数据;车离开关闭功能指当雷达探测到车速为零,信号处理模块发送关闭信号,关闭车辆360°检测系统的前端相机、光源,关闭出光口防尘罩。
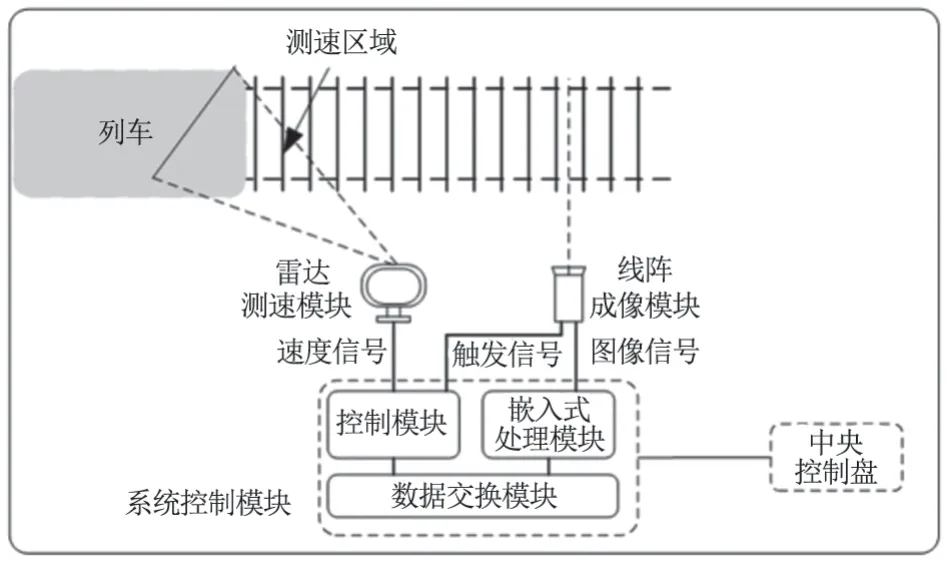
图5 来车触发子系统
3.2 车号识别子系统
车号识别子系统采用智能图像处理系统,在车辆不停车的情况下,识别每辆车的车号信息,并及时将车号数据,图像,视频信息上传到服务器,对进出的车辆进行自动统计,并保存数据。
车号识别子系统主要由图像采集盒、光电传感器、车号识别主机构成,其中图像采集盒安装在轨边,采集盒内安装有高清工业相机、高亮LED 补光灯、控制主机,车号主机为一台安装有图像处理、识别软件的工控机。如图6 所示。
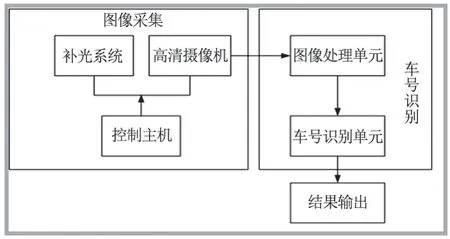
图6 图像识别车号子系统架构
通过轨边车号抓拍摄像机采集到的车号图像,在图像处理与分析主机里自动分析出车号信息,如图7 所示。

图7 车号识别工作流程示意图
具体车号算法识别技术采用目标检测网络和图像分类网络设计车号识别算法模型,对线阵成像模块采集到的车号图像进行智能识别,实现提取车号区域、智能识别车号的功能。识别效果和准确地受图像质量和现场环境影响较小,且识别准确度更高,解决了由于车号采集设备安装在复杂室外环境导致的图像识别问题;车号识别可兼容字符形态多样,解决了列车进出站时列车变速运动造成的车号字符拉伸或压缩的图像识别问题;识别结果不受列车车型的影响与限制,无须训练多个识别模型,在各种车型间可以做到兼容,解决了多车型、多字形、多车号命名规则的识别问题。如图8 所示。

图8 车号识别算法流程图
4 结语
通过采用研究设计的车体360°动态图像智能检测系统研究,解决和改善车辆部门的检修规程和业务模式,实现智能化、自动化的检测手段,减少车辆日常回库后人工巡检的工作量,实现车辆关键部件状态提前预警。实现列车不停车自动检测,获取大量的检测数据,通过大数据分析和智能挖掘,对异常情况发出警报,方便及时检修车辆,提高检修效率。
