遥感影像空间分辨率对河道水体识别影响
2023-08-28胡朝阳田冰茹何立滢付开雄
周 聂,陈 华,胡朝阳,褚 杰,刘 阳,田冰茹,何立滢,付开雄
(1. 武汉大学 水资源与水电工程科学国家重点实验室,湖北 武汉 430072; 2. 福建省水利水电勘测设计研究院有限公司,福建 福州350001; 3. 福建省水动力与水工程重点实验室,福建 福州 350001; 4. 襄阳市测绘研究院,湖北 襄阳 441003)
0 引 言
河流水系是社会、经济发展的重要自然资源[1]。近年来,在城市化和气候变化的双重作用下,我国水资源系统的脆弱性和不确定性增大,水资源问题日益凸显[2-4]。加强水资源系统监测,对全面详实掌握我国水资源变化,科学制定水资源保护策略,合理规划开发水资源具有重要意义[5-7]。
传统地基测绘方式可准确反映河流实际情况,是目前水资源监测管理的主要方式,但河流水系蜿蜒曲折,流域范围广,测量成本大,难以实现时空连续的河道形态演变观测[8]。卫星遥感具有观测范围广、时间分辨率高,不受地理位置和环境条件限制等优点,可实现一定程度的时空连续性观测,被广泛应用于地物资源监测中,逐渐成为水资源监测的重要手段[5,9-12]。如付宝晶[13]等基于GF-1影像数据,结合纹理、光谱及形状特征提取河道,有效减少灰度近似地物及河岸缺失;赵程铭[14]等基于GF-1 影像提取丰、枯水期山区河道,取得较好的识别效果,水体提取精度可达99%;Li[15]等结合UNet 网络与注意力机制,改进对洪水淹没范围的识别效果;Yao[16]等构建Swin-UNet 模型进行遥感图像分类,结果表明其模型在中分辨率遥感图像分割任务中表现良好;Carroll[17]等基于Landsat影像数据分析北美洲高纬度地区1991-2011年的地表水变化。
近30 年来,随着科技进步与遥感技术的成熟,大量遥感卫星成功发射,卫星组网技术得到广泛应用,卫星遥感数据的时空分辨率得到显著提升[18,19],陆地资源卫星遥感影像空间分辨率已发展到1~2 m[20],局部区域可达亚米级,这为更精细的水域河流态势监测提供可能。低空间分辨率遥感影像由于空间均化作用,图像亮度值更加平均,图像熵值相对较小,但过低的空间分辨率,将造成水域边界表征失效和地类错误识别。随遥感影像空间分辨率提升,影像清晰度显著提高,可更好表征水域复杂边界,但图像像元数量同样呈指数倍增加,进行解译识别时,图像熵增现象明显,图像解译结果椒盐化现象严重。因此,并非更高精度的遥感影像就可以取得更好的水体识别解译效果[21,22]。郝振纯[23]等研究表明空间分辨率的不同会对空间参数的特性产生相关影响,随着空间分辨率降低,流域河网密度以及河网长度等将逐渐减少;周蕾[22]等研究表明,对于地形平坦、边界规整、水体面积较大的区域,空间分辨率对水体识别效果影响较小。国外学者也开展了相关研究,Benson[24]等以威斯康辛州北部为研究区域研究遥感影像空间分辨率对湖区空间结构特征识别的影响,结果表明,随着遥感影像空间分辨率的降低,湖泊面积呈减少趋势。Enwright[25]等研究发现,空间分辨率为0.33、0.54、1 和2 m 的遥感影像对大面积水体识别效果相似,但当水体面积小于250 m²时,解译结果存在较大差异。Mishra[26]等基于LISS IV(5.8 m)和Landsat 8-OLI(30 m),通过最大似然法分析遥感影像分辨率对土地利用的分类的影响,且结果表明空间分辨率更高的LISS IV 影像对水体的识别效果更佳。然而,目前研究多集中于湖泊、水库和海域等连续性片状水体,对于遥感影像空间分辨率对蜿蜒连续的河道带状水体识别影响的研究仍十分有限。
河道是地表水资源最重要的输送渠道,河道的形态演变往往伴随着水资源的态势转变,在遥感数据得到不断丰富的条件下,探究遥感影像空间分辨率对河道水体信息提取的影响,对选取适宜空间分辨率的遥感影像数据,开展基于遥感影像的水资源时空变化连续监测,精准评估预测水资源情况及其变化态势具有重要研究意义。闽江下游流域河道类型丰富,包括山区型河道、城区型河道和入海型河道,可较为全面反映遥感影像空间分辨率对各类河道水体识别影响。为此,本研究以闽江下游为研究区域,基于当前广泛应用的Landsat-8、Sentinel-2和高分六号(GF-6)卫星影像数据,分析遥感影像空间分辨率对河道水体识别的影响,及其对河道形态的表征能力,以期为开展不同河道水体遥感监测任务时,选取适宜空间分辨率的遥感影像数据提供参考。
1 研究区域概况及基础数据信息
1.1 研究区域概况
闽江流域地处亚热带季风区,气候暖和,雨量充沛,多年平均年降水量约1 400~2 300 mm[27],降水量地域分布趋势为自西北向东南递减,上游向下游递减。闽江下游沿河两岸分布着众多取水口,是福州市主要的生活饮水和工业用水来源。近年来,受高强度人类活动影响,经济发展需水量和采砂量显著增加,且水口水库等涉河工程的建设,使来沙量锐减,下游河道冲刷不断加强,河床下切严重。河床形态与水动力条件的改变使径流与潮流平衡发生较大变化,南北港分流比呈不稳定状态,潮界、咸界不断向上游延伸[28]。全方位监测闽江下游流域河流形态对水资源合理调配、咸潮等水问题科学治理具有重要意义。
闽江流域水系示意图如图1 所示,水口水库至侯官约65 km,流经峡谷、丘陵和平原地形,河道单一连续,上游河道较窄,河宽约为200~500 m,下游河道较为宽阔,局部可达700 m,多洲滩、河汊,河床由中粗沙组成,岸滩多黏土和沙土。侯官以下经南台岛将河道分为两汊即南北港,北港穿越福州市中心区至马尾长约34 km,河道深窄,最窄处约130 m;南港经乌龙江大桥转至马尾长约36 km,南港河道较宽,平均河宽约为1 670 m,滩槽多变,为主要泄洪排沙河道。南北港汇合后,转向东北流至亭江,长约12 km,后分为两汊,南汊称梅花水道,至梅花镇入海长约18 km,北汊至长门入海长约13 km,局部河宽达5 000 m。流域内河道类型丰富,涵盖山区型河道、城区型河道及入海型河道,是研究遥感空间分辨率对不同类型河道水体识别影响的典型区域。

图1 闽江下游流域示意图Fig.1 Schematic diagram of the downstream watershed of the Minjiang River

图2 遥感影像解译流程图Fig.2 Flow diagram of remote sensing image interpretation
1.2 遥感数据基础信息
为探究不同空间分辨率遥感影像对水体解译的影响,本研究选取空间分辨率分别为30、10 和2 m 的Landsat-8、Sentinel-2和GF-6 卫星影像作为数据源,所获取影像均已经过几何校正、辐射校正和大气校正等预处理,其中Landsat-8搭载OLI陆地成像仪,具有9 个波段,空间分辨率为30 m,成像宽幅为185 km。Sentinel-2 搭载多光谱成像仪(MSI),采用推扫模式,共有13 个波段,光谱范围介于400~2 400 nm 之间,涵盖了可见光、近红外和短波红外,空间分辨率10 m,成像幅宽290 km,每轨最大成像时间为40 min。GF-6 卫星搭载2 米全色多光谱高分辨率相机,观测观测幅宽为90 km。
同时,考虑到枯水期时河流内水体分布较为均匀,在短时间内河道水体变化相对较小,可一定程度上避免由洪水、暴雨等原因造成的水体泛滥带来的影响,更有利于分析遥感影像空间分辨率对水体识别的影响。为此,本研究选取2021年闽江下游主河道枯水期的数据进行对比分析。其中Landsat-8 影像为2021 年3 月4 日,Sentinel-2 影像为2021 年4 月6 日,GF-6 影像为2021年4月3日。
1.3 模型训练数据
本研究中模型水体训练样本源于地理国情调查以及手工标注数据。地理国情调查数据通过ArcGIS软件,将地理国情调查数据覆盖至各分辨率遥感影像上,采用人工目视检查的方式,修改匹配的矢量数据,而后将矢量数据转换为像素值为0和255 的二值掩膜图,并裁剪为256×256 尺寸的训练数据。手工标注的影像利用ArcGIS 软件手工绘制水体,制作水体矢量数据,后利用与处理地理国情数据相同的方式将矢量数据转换为二值掩模图并裁减为256×256尺寸的训练数据。综合以上数据预处理步骤,共获取Landsat-8、Sentinel-2 和GF-6 水体样本数据分别达41 912组,按照9∶1比例划分为训练集与验证集,进行模型训练。
2 研究方法
2.1 遥感影像解译方法
目视解译法是目前针对高分辨率遥感影像数据识别地物的最有效方法,可最大程度的精确区分各类地物,但目视解译法所需人力成本较大,难以独立完成遥感影像解译工作。因此,本研究通过结合UNet[29]神经网络和目视解译法进行遥感影像解译,首先通过UNet神经网络进行全域水体自动识别,而后,基于高清遥感影像,采用目视解译的方法对自动识别效果较差的局部区域进行二次修正,提升水体识别效果,最后基于GIS工具计算表征河流形态信息。
UNet 是一种高度对称的编码器-解码器网络,被广泛应用于生物医学、无人驾驶、地物分类等图像识别领域[30-34]。模型编码器层设置两个3×3 大小的卷积层提取特征,而后衔接2×2大小的最大池化模块对提取特征进行下采样。解码器层中每个模块都包含一个上采样操作,上采样单元首先采用通过2×2大小的反卷积模块进行深度空间变换,并在同一层次构建残差卷积层连接,使特征图可以融合更多尺度的特征。最后衔接以全连接层,将解译编码映射为水体识别结果,本研究中,基于迁移学习思想,将ResNet34 网络作为特征提取主干网络,进行特征融合,引入自注意力机制提高对影像局部关注度,其结构图如图3所示。

图3 UNet网络结构示意图Fig.3 Schematic diagram of UNet network structure
在选取模型损失函数时,考虑到交叉熵损失函数(Bce Loss)可较好保证背景要素的正确分割,Dice 损失函数可有效平衡前景及背景信息,组合损失函数能有效关注像素级别的分类,使模型训练更加稳定的优势。因此,在本研究中,采用结合Bce Loss 和 Dice Loss 的组合损失函数作为模型损失函数,其计算公式如式(1)~(3)所示。
式中:yij表示真实标签;表示预测结果;对所有的样本集合N和所有的标签集合L进行计算;ζ是为防止分母为0,设置为0.000 01。
2.2 分类效果评价指标体系
本研究中,分类效果评价通过与基于GF-6 影像目视解译结果进行对比分析,需说明的是,本研究主要关心遥感影像空间分辨率对河道水域识别及其形态的影响,且目视解译难以精确覆盖所有的小型水域,因此,遥感影像解译效果的量化分析时仅考虑主河道范围内的水体,通过构建掩膜的方式忽略河岸两侧水田、池塘等较小范围水域信息。为综合评价遥感解译效果,基于混淆矩阵,采用准确率、精确度、召回率、F1 指数和Kappa 系数分析水体识别效果。准确率、精确度、召回率和F1指数可分别由式(4)~(7)表示。
式中:Accuracy为精确度;Precision为准确率;Recall为召回率;F1 为F1 指数;TP为正样本正确分类数量;TN为负样本正确分类数量;FP为正样本错误分类数量;FN为负样本错误分类数量。
Kappa 系数[35]是一种基于混淆矩阵的分类精度衡量指标,对于二分类问题可由式(8)表示。Kappa 系数计算结果常落在0~1间,当Kappa系数越接近于1,识别效果越好。
式中:K为Kappa系数;TP为正样本正确分类数量;TN为负样本正确分类数量;FP为正样本错误分类数量;FN为负样本错误分类数量。
2.3 河流形态分析指标
进行河流水系遥感监测时,对河道形态反映同样具有重要意义,本研究选取河面曲折系数和河道分形维数表征河道形态,其中河面曲折系数用以表征河流弯曲程度,曲折系数越大,河段弯曲程度越大,对于分汊型河道,本研究根据各汊道的加权结果进行表征,曲折系数由式(9)表示:
式中:Ka为河道曲折系数;Li为汊道i河段中心线长度;LRi为汊道i河段起止端点直线距离;n为总汊道数量;A为河道总面积;Ai为汊道i的水域面积。
河道分形维数用以描述河流形态的复杂程度和不规则程度参数,分形维数越大则河段越曲折,泄洪能力越差,河道分形维数常在1.01~1.19 之间,河网分形维数多介于1.50~1.69[36],可由式(10)表示:
式中:N(r)为对应年份覆盖河道的网格总数;r为覆盖河道的正方形网格大小;FD为河道分形维数,改变r的大小,lgN(r)与lg(r)呈线性关系,FD为lgN(r)与lg(r)经过线性回归后的直线斜率的绝对值。
3 研究结果及分析
3.1 目视解译特点分析
目视解译采用三波段融合数据,其局部示意图如图4所示。通过Landsat-8 影像,可清晰分辨河道分布情况,对于河道中较大的沙洲也可通过目视解译的方法判别,且图像相对平滑连续,但水域边界常以混合像元的形式呈现,难以通过Landsat-8影像准确划分边界。

图4 不同空间分辨率卫星影像图对比Fig.4 Comparison of satellite images with different spatial resolutions
Sentinel-2影像与Landsat-8影像相比,图片变化更加细致,对水体、沙洲、边滩的形态特征反映更加详细,通过目视解译,能基本识别出水体的边界轮廓,以及部分沙洲边滩区域。
GF-6 影像较Landsat-8 和Sentinel-2 影像在图像清晰度上获得显著的提升,通过目视解译的方法,可清晰的判断出水体的边界,图像对地物的反映更加细致,能表现出河道更多细节信息,可清楚分辨河岸两侧的港口、道路等。
3.2 模型训练效果分析
模型的训练过程损失函数变化过程如图5 所示,在三类影像条件下,模型损失函数均可趋于收敛,并保持在较小范围。其中,在Landsat-8影像数据集中,模型在迭代至100次后,在训练集及验证集上的损失函数逐渐收敛,并分别趋近于0.55 和0.56。模型在Sentinel-2 影像条件下,迭代40 次后损失函数逐渐稳定,训练集和验证集误差分别趋于0.35和0.39。GF-6影像中,模型在验证集及训练集中的损失函数分别趋于0.80 和0.85。因此,Sentinel2影像条件下,模型在训练集中的表现效果最好。尽管在训练数据中,在GF-6 影像条件下模型最终损失函数较高,但这并不能表明在实际的应用中,GF 影像的识别效果会更差。因为受遥感影像空间分辨的影响,在相同的256×256 的像元条件下,在Landsat-8 和Sentinel-2 影像中,验证数据大量以非水体的形式存在,模型可较为轻松的识别出这部分像元,因此其准确率可能存在整体偏高的情况。而在实际遥感监测任务应用中,其识别效果应根据具体应用情况进行判断。

图5 模型的训练过程损失函数变化趋势图Fig.5 Trend chart of the loss function during the training process of the model
为进一步检验模型对固定区域水体的识别性能,在武汉市严东湖局部水域进行了模型性能检验,该区域水域面积约为3.34 km²,除广阔的湖面外,沿湖周边还存在大量小型水塘。各遥感影像空间分辨率的解译结果如图6 所示,其对应的误差见表1。

表1 严东湖水体面积解译结果分析Tab.1 Analysis of water extraction for Yandong Lake

图6 遥感影像解译结果对比Fig.6 Comparison of remote sensing image extraction effect
结果显示,GF-6 影像数据条件下,河道水体识别效果最佳,其准确率达到0.952,同时召回率为0.982,F1 值和Kappa 系数分别为0.963 和0.893,可较好的识别出湖泊水体,并能在一定程度上识别出湖泊边上的水塘。由于湖泊边界条件复杂,同时,湖泊周围存在大量小型的水塘,随着遥感影像分辨率的降低,水体识别效果下降。在Sentinel-2 影像和Landsat-8 影像条件下,Kappa 系数分别为0.795 和0.838,模型整体上可较为准确的识别出大面积湖水,但湖泊水体边界位置处存在一定偏差,且难以有效识别出小型的水体。
3.2 全域河道识别效果分析
闽江下游全域河道水体识别结果显示,GF-6 较Landsat-8和Sentinel-2 卫星影像,可更加准确捕捉各类水体情况,对河道边界刻画更为细致,从图7 中可看出,GF-6 影像解译结果除准确识别出主河道水体外,也识别出部分支流、水田和水塘等水域;Sentinel-2 解译结果次之,除识别河道水体外,亦可在一定程度上的识别河道两侧的小型水体;Landsat-8 解译结果显示,其解译结果可基本准确覆盖主河道,河道边界处受混合像元的影响,其识别效果要略差于Sentinel-2 和GF-6 影像解译结果,此外,对于小型水域,其识别效果明显较差,仅能识别出部分较大水域,无法准确的表示出其边界情况。
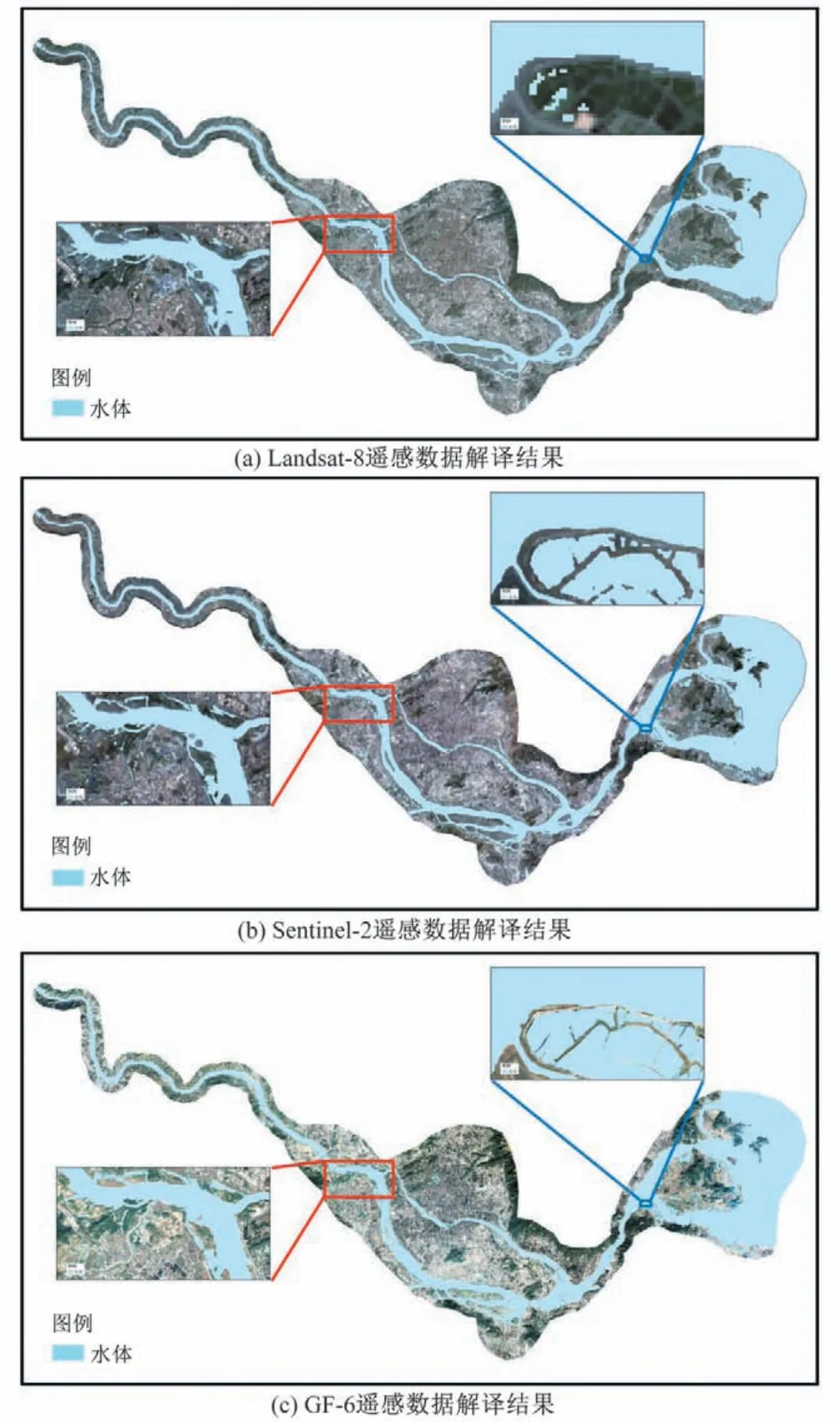
图7 闽江下游遥感影像解译结果对比Fig.7 Comparison of remote sensing image extraction effect for the downstream watershed of the Minjiang River
为量化遥感影像空间分辨率对河道水体识别效果影像,研究以GF-6 影像图为基础,随机生成1 200 个点位,其中目视解译为水体的正样本800 个,为非水体的负样本400 个,如图8所示。

图8 研究区随机点位示意图Fig.8 Schematic diagram of random sites in the study area
构建混淆矩阵,计算各空间分辨率遥感影像解译结果的准确率、精确度、召回率、F1 指数和Kappa 系数,结果如表2 所示。GF-6 影像解译结果最好,其准确率、召回率及F1 指数分别为0.967、0.983 和0.975,Sentinel-2 与GF-6 影像识别效果较为接近,F1 超过0.97,召回率达到0.95 以上。Landsat-8 影像解译结果稍差,其准确率、召回率及F1 指数分别为0.960、0.943 和0.969。同时,Kappa系数计算结果同样显示,GF-6与Sentinel影像分类效果几乎一致,其Kappa 系数均为0.924,Landsat 影像,Kappa 系数为0.912,表明尽管Landsat 影像解译效果相对较差,但其解译结果与目视解译结果间同样存在高度的一致性,三种空间分辨率的遥感影像在闽江下游主河道全域的水体识别中均可取得较好效果,空间分辨率对主河道水体的整体识别影像较小。但由于闽江下游入海口处存在较大面积的海域,水体以单一像元的形式存在,更有利于水体的识别,因此,全域的分析可能过高估计水体识别效果。
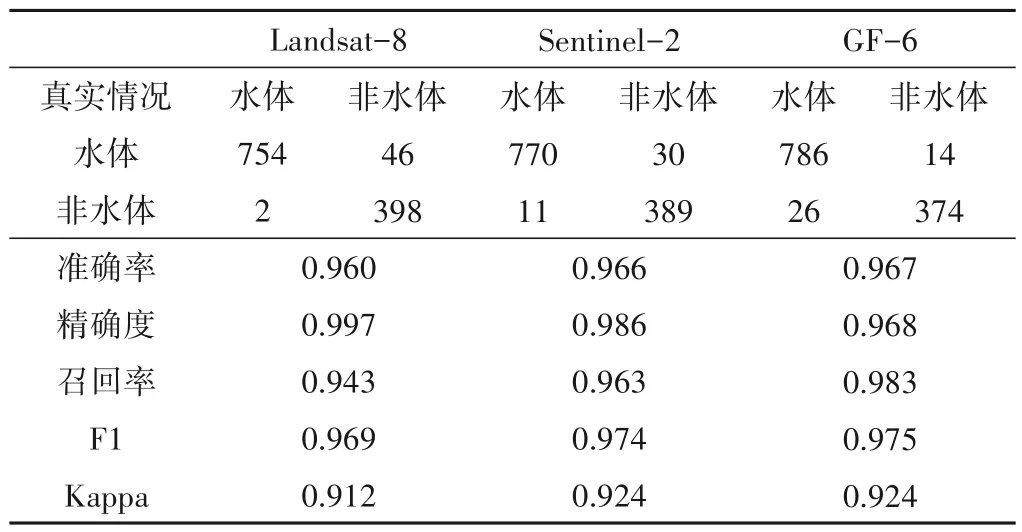
表2 闽江下游水体面积解译结果分析Tab.2 Analysis of water extraction for the downstream watershed of the Minjiang River
3.3 河道分段识别效果分析
3.3.1 山区型河道识别效果分析
闽清闽侯段,主要为峡谷、丘陵等山区地形,为山区型河道。河道蜿蜒连续,河道整体顺直,其理论河道曲率系数为1.444,平均河宽约600 m,河道边界较为规整,建筑设施较少。闽清闽侯段各遥感影像解译结果如图9所示。

图9 闽清闽侯段遥感影像解译结果对比Fig.9 Comparison of remote sensing image extraction effect for the section from Minqing to Minhou
闽清闽侯段不同空间分辨率遥感影像的水体面积解译结果精度分析如表3所示,Landsat-8、Sentinel-2和GF-6影像均取得较好的水体识别效果,其准确率分别为0.955、0.954 和0.966,表明在3 种不同空间分辨率的遥感影像条件下,均可有效的识别出河道水体。同时,GF-6 影像解译结果表现出更高的召回率(0.981),Landsat-8 影像解译结果表现出更高的精确度(0.965),F1 指数和Kappa 系数均说明GF-6 影像解译效果最佳。

表3 闽清闽侯段水体面积解译结果精度分析Tab.3 Analysis of water area extraction for the section from Minqing to Minhou
闽清闽侯段河道形态指标计算结果如表4 所示,GF-6 和Sentinel-2 影像解译结果的河道长度与理论河道长度较为接近,其与理论河道长度间的绝对误差分别为0.091 和0.084 km,其识别河道曲率均为1.393,Landsat-8 影像解译结果河道曲率为1.405,略大于理论河道曲率,但仍均有较高的可信度,并未出现严重的计算结果失真的情况。分形维数计算结果与河道曲率计算结果相似,Landsat-8、Sentinel-2 和GF-6 影像解译结果计算获得的河道分形维数分别为1.411、1.433 和1.450,Sentinel-2和GF-6影像解译结果更为接近理论值,但Landsat-8影像解译结果同样具有较高准确率,表明2~30 m的遥感影像空间分辨率差异,并不会对河道形态识别产生显著影响。

表4 闽清闽侯段河道形成参数分析Tab.4 Analysis of the morphological parameters of the river channel from Minqing to Minhou
闽清闽侯段河道边界较为规整,港口码头等人工建筑设施较少,平均河道宽度约为600 m,Landsat-8、Sentinel-2 和GF-6影像在河道断面上平均水体像元数分别为20、60 和300,三类空间分辨率的遥感数据水体识别结果与目视解译结果间的F1和Kappa 系数均达到0.9,表明均可有效识别出河道水域范围。同时,河道曲率与分形维数的计算结果同样显示,空间分辨率为2~30 m 的遥感影像对闽清闽侯段河道形态的识别效果影响不大,3种不同分辨率的遥感影像均可较为准确反映河道形态。对于边界较为规整,港口码头等人工建筑设施较少的山区型河道,断面平均水体像元大于20时,即可有效识别出河道形态,进一步提高影像分辨率,对河道形态识别效果提升较小。
3.3.2 城区型河道识别效果分析
南北港段临近福州市区,受人类活动影响显著,为城区型河道。其中北港段,河道形态规整,沿河建有多座跨江大桥,并沿岸建设有多个港口码头,平均河宽约490 m,最窄处约130 m,上游入口处曲率较大外,其余河段整体顺直平滑。南港段河道宽阔,下游段多沙洲,且存在大型的河中岛屿,河道形态较为复杂,北港段各遥感影像解译结果如图10所示。

图10 北港段遥感影像解译结果对比Fig.10 Comparison of remote sensing image extraction effect for the Beigang section
北港段各空间分辨率遥感影像水体面积解译结果精度分析如表5所示,河道水体理论面积为18.004 km²,Landsat-8、Sentinel-2 和GF-6 影像的实分面积分别为14.785、16.098 和18.295 km²。GF-6 影像所划分的水体面积与理论面积最为接近,其与目视解译结果间的重合面积为17.352 km²,召回率和精确度分别为0.964和0.948。Sentinel-2影像的分类结果次之,水体面积识别结果与目视解译结果间的重合面积为16.098 km²,召回率和精确度分别为0.855、0.956,整体识别效果良好。Landsat-8影像水体识别效果相对较差,其召回率仅为0.794,F1 指数和Kappa 系数同样显示,GF-6 影像的水体识别效果要显著优于Landsat-8,GF-6 影像的F1 指数和Kappa 系数分别为0.956 和0.934,而Landsat-8 影像为0.872 和0.818,表明在北港段,不同空间分辨率的影像在水体识别效果存在明显差异。

表5 北港段水体面积解译结果精度分析Tab.5 Analysis of water area extraction for the Beigang section
北港段河道形态参数分析结果如表6 所示,河道形态参数对比结果显示,Landsat-8、Sentinel-2 和GF-6 影像识别结果计算知河道曲率分别为1.250、1.238 和1.240,均接近于理论河道曲率。分形维数的计算结果表明,GF-6 影像分类效果要优于Landsat-8,其与理论分形维数间的误差分别为0.001和0.045。

表6 北港段河道形态参数分析Tab.6 Analysis of the morphological parameters of the river channel in the Beigang section
在南港段,河道最宽处达到4 600 m,平均河宽约为1 670 m,三类影像的解译结果较北港段均有所提升,各遥感影像解译结果如图11所示。

图11 南港段遥感影像解译结果对比Fig.11 Comparison of remote sensing image extraction effect for the Nangang section
南港段水体面积解译结果精度分析如表7所示,其中GF-6影像的水体识别效果仍然最佳,其河道水体识别结果与目视解译结果间重合面积为68.703 km²,召回率为0.974,准确率为0.965,同时精确度较北港段也有所提升,为0.959。Landsat-8水体识别效果同样得到有效提升,其召回率、准确率和精确度分别为0.860、0.919 和0.981。三类影像的F1 指数均大于0.9,Landsat-8 和Sentinel-2 的Kappa 系数较北港段有所提升,但GF-6 影像的Kappa 系数并未显著提升,且有所下降,这可能是由于南港段沙洲众多,虽然GF-6 影像可更好反映边界情况,但河道形态复杂,在局部也出现更多错分漏分情况,进而GF-6 影像的解译结果并未得到进一步的显著改善。

表7 南港段水体面积解译结果精度分析Tab.7 Analysis of water area extraction for the Nangang section
南港段河道形态参数计算结果如表8所示,Landsat-8、Sentinel-2 和GF-6 影像解译数据河道曲率分别为1.431、1.423 和1.426,均略大于理论河道曲率,河道分形维数分别为1.588、1.602和1.633,均接近于理论分形维数,空间分辨率的差异同样未对南港段河道形态参数的产生显著影响。
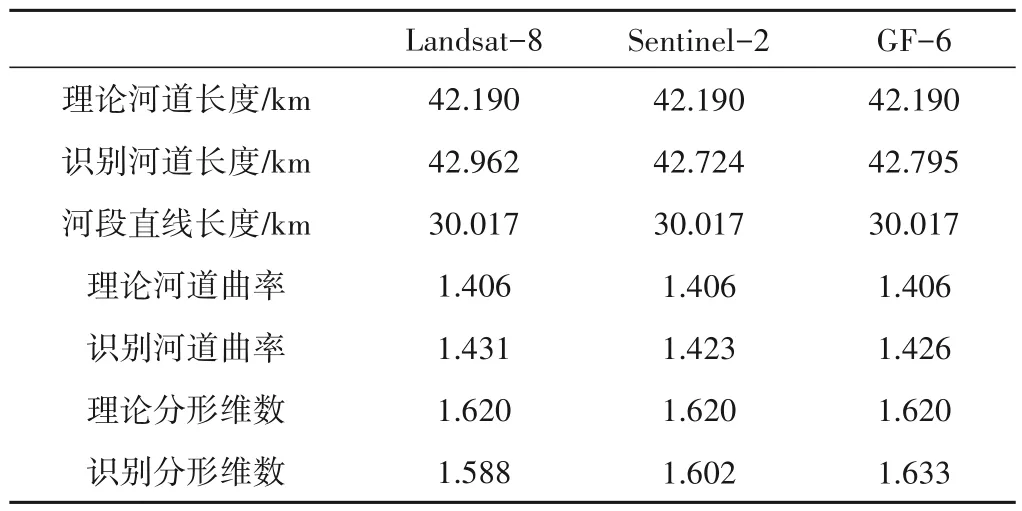
表8 南港段河道形态参数分析Tab.8 Analysis of the morphological parameters of the river channel in the Nangang section
综上所述,在北港段,GF-6 影像水体识别效果最佳,Sentinel-2 卫星影像水体识别效果次之,Landsat-8 识别效果相对较差。这可能是由于北港段整体河道宽度较窄,平均河道宽度为490 m,最窄处仅为130 m,受空间分辨率的限制,Landsat-8影像在河道断面平均水体像元数约为16,两岸边界处的水体常以混合像元的形式存在,难以准确区分水体边界,水体识别误差相对较大,当断面平均水体像元数提升至49时(Sentinel-2),F1和Kappa 可分别提升至0.903,0.858。在南港段Landsat-8 和Sentinel-2 影像分类效果较北港段明显提升,这是由于南港段地形主要以平原与丘陵为主,平均河宽1 670 m,Landsat-8影像在各河道断面平均水体像元数达55,Sentinel-2 为167,算法可有效识别出河道主体,河道边界处的漏分错分对整体的分类效果评估影响较小。但与闽清闽侯段的识别结果对比显示,尽管南港段河道整体更为宽阔,闽清闽侯段识别效果却更佳,这是由于南港段沙洲边滩众多,河道形态复杂,导致算法漏分面积较大(9.851 km²),因此在进行复杂河段局部区域识别时,可采用更高空间分辨率的遥感影像数据。
3.3.3 入海型河道识别效果分析
马尾至入海口段,河流汇集,流入大海,河道整体更为宽阔,河宽最宽处约5 000 m,下游存在大面积海域,其遥感影像解译结果如图12所示。

图12 马尾至入海口段遥感影像解译结果对比Fig.12 Comparison of remote sensing image extraction effect for the section from Mawei to the sea
马尾至入海口段河道水体面积解译结果精度分析如表9所示,三类不同空间分辨率的遥感影响数据在该河段中的表现效果较为接近,其中GF-6 卫星影像表现结果仍然最好,其水体识别结果与目视解译结果间的重合面积为214.404 km²,召回率达到0.994,同时精确度也较高,为0.976,几乎达到完美的分类效果。Sentinel-2卫星影像和Landsat-8卫星影像分类效果十分接近,其召回率分别为0.976和0.977,准确率均为0.973,精确度分别为0.989和0.987,且F1指数均达到0.98,Kappa系数也均超过0.92,三类空间分辨率条件下,均取得极为优异的水体识别效果。

表9 马尾至入海口段水体面积解译结果精度分析Tab.9 Analysis of water area extraction for the section from Mawei to the sea
河道形态分析结果如表10 所示,Landsat-8、Sentinel-2 和GF-6影像解译结果误差较为接近,Landsat-8和Sentinel-2影像解译结果计算河道曲率偏大,分别为2.128 和2.117,GF-6 影像解译结果略小于理论河道曲率,为1.995。分形维数计算结果同样较为接近,分别为1.764、1.767 和1.765,表明在马尾至入海口河段,2~30 m 遥感数据空间分辨率的改变同样不会显著影响河道形态识别效果。
上述结果表明,在马尾至入海口段,三种分辨率的遥感影像的水体解译结果相差不大,且都可准确反映水体面积及河道形态,这可能是由于马尾下游段河道面积宽阔,受建筑阴影、船只遮挡等因素的影响较小,且下游存在大范围的海域面积,大量水体以稳定的像元呈现,进而在该区域获得优异的水体识别效果。
3.4 局部区域解译结果分析
为清晰的展示河道识别的局部区域效果,选取位于北港段的中洲岛主题公园进行局部放大展示(图13)。此处河道宽度介于90~300 m,解译结果显示,通过GF-6影像仍可较为清晰的分辨出河道边界,但在中洲岛北侧,受建筑物阴影的影响,河道部分边界难以判断。其解译结果在河岸边界光滑区域表现良好,但在港口码头处出存在一定错分漏分现象,并也未能完全识别解放大桥。在Sentinel-2 影像条件下,建筑物轮廓及河岸边界已经趋于模糊。在Landsat影像条件下,河道边界大量以混合像元的方式呈现,难以准确区分其边界,但其主河道区域像元更为光滑,更有利水体识别。
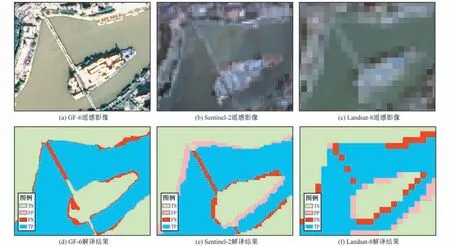
图13 遥感影像局部解译图(中洲岛主题公园)Fig.13 Remote sensing image local interpretation map (Zhongzhou Island Theme Park)
从图13(d)~图13(f)可看出,在河道边界处,GF-6 影像解译结果最为接近实际的河道边界,整体更为连续,并识别出解放大桥的局部区域其FN 区域较FP 区域更大,表明将非水体识别为水体更为显著,即在河道水体边界处存在一定过度解译水体现象。经统计,Sentinel 影像中,FP 区域为32 700 m²,FN 区域为14 000 m²,其漏分水体的现象更为明显。在Landsat-8 影像条件下,河道边界处大量以混合像元的形式存在,其FP和FN分别为25 200 和27 900 m²,说明在水体边界处,漏分现象与错分现象均存在。其识别效果与河岸边界条件有关,当河岸边界像元较明亮时,存在一定错分现象,当河岸边界像元较暗时,则更多的表现出漏分现象。
3.5 城区窄道河流分析
为分析遥感影像空间分辨率对城区狭窄河道的识别影像,研究选取福州市区部分狭窄河道进行分析,研究区域内河道宽度介于为10~100 m,如图14 所示。解译结果显示,在GF-6 影像条件下,当河道宽度大于20 m 时,仍可较为完整的解译出河道,但当河道宽度小于20 m,GF-6 影像也未能有效识别河道水体[图14(b)],出现局部河道未识别的现象。在Sentinel-2影像条件下,河道边界轮廓已逐渐模糊,通过遥感影像已较难判断河道边界情况,但对于河宽大于30 m 的区域,依然可以解析出部分河道。在Landsat-8 遥感影像条件下,河宽小于30 m 的河道大量以混合像元的形式存在,难以判别出河道,同时,在城区建筑物影像和部分道路的混合作用下,像元可能呈现出与河道类似的情况,导致出现局部错误划分的情况。Landsat-8影像对河道宽度大于50 m的河段具有一定的表征能力,解译结果可识别出部分河道,但其解译效果较GF-6 和Sentinel-2 影像明显偏差。

图14 城区狭窄河道解译结果对比图Fig.14 Comparative analysis of the interpretation results of narrow urban rivers
城区狭窄河道定量分析结果如表11所示,虽然在三类不同空间分辨率的遥感影像条件下,其准确率均可达到0.9,但Landsat-8 和Sentinel-2 影像的召回率分别仅为0.381 和0.639,其Kappa系数分别为0.484和0.668,表明Sentinel-2影像中存在部分水体误差准确识别,而Landsat-8 影像中则存在大量水体误差准确识别。GF-6 影像的F1 值和Kappa 系数分别为0.903和0.891,具有较高的可靠性,能识别出大部分的城区狭窄河道的水体,但从图11(b)中也可较清晰的看出,随遥感影像分辨率的降低,漏分现象显著增加,GF-6 影像也难以有效识别出河宽小于20 m 的河道。因此,在进行狭窄河道水体的遥感解译时,应选取空间分辨率更高的遥感影像。

表11 城区狭窄河道解译结果精度分析Tab.11 Analysis of water area extraction for the narrow urban waterways
4 结 论
为探究遥感数据空间分辨率对河道水体识别及河道形态表征的影响,本研究以闽江下游主河道为研究区域,以Landsat-8、Sentinel-2和GF-6影像为数据源,通过结合UNet算法和目视解译法进行水体识别解译,分析对比不同空间分辨率遥感影像在不同形态河道中的水体识别效果。主要结论如下:
(1)空间分辨率为2~30 m遥感数据的对河道形态识别差异不大,均可较为准确的反映河道形态。
(2)在边界规整的山区型河道和河面宽阔的入海型河道,空间分辨率的对河道的水体识别的影响较小,断面平均水体像元数大于20时,可获得优异的水体识别效果。
(3)对于河面较宽,但河流形态复杂的河道,需断面平均水体像元数接近50 才可获得较好的水体识别效果。遥感影像空间分辨率对河面较窄的城区型河道的水体识别的影响较大,高空间分辨率影像解译结果要明显优于低空间分辨率影像解译结果。
(4)随遥感影像空间分辨率的降低,遥感影像对河岸边界表征能力将逐渐下降,漏分水体的现象将明显增加。
在进行水体遥感监测时,对于边界规整的山区型河道和河面宽阔的入海型河道,可选择Landsat-8 影像数据,对于沙洲边滩较多、河道形态复杂的河道,可使用Sentinel-2 遥感影像数据,而对于河宽较窄的城区型河道,建议使用空间分辨率更高的GF-6遥感影像进行河道水体识别。
