水库大坝接缝开合度轻量化监测技术研究与应用
2023-08-26孙晨丁勇谢东辉李登华
孙晨 丁勇 谢东辉 李登华

摘要:
针对传统接缝开合度测量方法效率较低、难以实现长期监测和自动化测量成本较高等问题,提出了一种针对水库大坝接缝开合度测量的轻量化监测技术。依据所建立的接缝开合度测量等效物理模型,在接缝附近区域架设低成本球型摄像机并在接缝两侧绘制相应标识,通过预处理、图像配准、模板匹配等流程得到标识物的特征点相对坐标,经多次拍摄后计算相对坐标变化,进而得到接缝开合度。室内模拟与现场试验结果表明:在无光环境下测量结果比有光环境下更为精确,符合工程实际场景;现场接缝开合度测量误差均小于0.2 mm,符合规范中监测精度要求,与自动化仪器测量结果重合率较高,波动趋势基本一致。该技术具有高效性、实时性、准确性、低成本等特点,对水库大坝结构的安全监测具有一定的实用价值。
关 键 词:
接缝开合度; 图像处理; 绘制标识; 模板匹配
中图法分类号: TV698.1
文献标志码: A
DOI:10.16232/j.cnki.1001-4179.2023.08.034
0 引 言
在中国众多的水库大坝中[1],混凝土重力坝是主要坝型,在其建设过程中,接缝是关键施工项目,可以起到减少坝体纵向约束的作用以适应运行期地基的不均匀沉降[2],是大坝挡水和渗流控制的重要防线[3]。若后期对接缝监测不到位,开合较大,则会将其有利作用转为隐蔽的潜在危险,一定程度上削弱混凝土坝体承载力,破坏坝体防渗性能[4]。因此,在混凝土重力坝的日常安全监测中,及时有效地监测接缝开合度成为重要一环。
通过现场深入调研可知,接缝开合度监测主要通过人工与自动化仪器相结合的方式进行[5-8],但检测人员利用游标卡尺等设备进行测量,存在效率低、成本高等问题。随着机器视觉与计算机图像技术的飞速发展,依托计算机图像识别的结构病害诊断方法受到广大学者的重视,但由于接缝与裂缝病害的性质不同,接缝不因后期结构变形而产生,易人为忽略。现在对于接缝的研究主要集中在施工质量控制上[9-11],而针对如何利用图像处理方法进行接缝开合度监测的研究还较少。接缝与裂缝两者具有共通之处,也有一定区别,国内外学者对于裂缝图像测量的大量研究成果可为接缝测量提供有效思路。张伟光等[12]提出了一种基于机器学习与图像处理的裂缝提取算法。Rahmat[13]等提出了一种基于Viola-Jones算法的改进级联面检测技术,用于直接检测混凝土墙的裂缝。肖创柏等[14]提出了一种基于Faster R-CNN的裂缝检测与提取算法,可定位裂缝位置,分割裂缝目标,计算出裂缝长度。此类技术大部分专注于在单一方法下,通过裂缝形态与图像直接测得某一点或某一段宽度,存在分析速度慢、复杂条件下识别困难的缺陷。对于贯穿长度较长、内部设有止水设备的接缝而言,直接提取接缝轮廓的可行性不高。同时,接缝本身不具有危害性,不需定位识别。方志等[15]基于图像分析技术,在混凝土表面粘贴纯色标定块,通过图像处理确定最大裂缝宽度。Nishiyama等[16]在裂缝的兩侧建立靶点,对靶点的数字图像进行处理来确定靶点的位移,从而得到裂缝宽度的发展趋势。上述研究通过在裂缝两侧粘贴人工标志点,巧妙地将裂缝宽度测量转变为标志点测量,规避了直接提取形态分析的技术难点,大大减少了算法工作量,提高了检测效率。
基于此,为有效了解坝体运行状态并及时发现大坝安全隐患,本文通过借鉴相关学者研究经验,将计算机视觉应用于接缝开合度监测,拟开展以下研究:探析接缝开合度变化实质,构建出测量等效物理模型,并依据实际工程场景设计油漆绘制标识,实现无损检测;采用双重图像预处理技术针对性提高采集的接缝图片质量,便于后续处理分析;提出基于不动点原则的图像配准方法,有效解决现场摄像机轻微晃动造成图片姿态发生改变而影响测量结果的问题;提出运用模板匹配技术提取标识形心特征点,并通过像素解析度换算的方法完成距离精确测算,探究得出一种低成本、高效率、高精度的接缝开合度监测技术。
1 接缝开合度轻量化监测
1.1 接缝开合度测量等效物理模型
接缝在水库大坝结构中通常具有不均匀性,接缝的内壁有与背景颜色相近区域,界限区分不明显,接缝内部一般还设有止水设备等。若采取类似于裂缝的图像处理方式,即直接识别并分析宽度[17-18],则难以将接缝区域准确提取分析,极易造成测量误差。
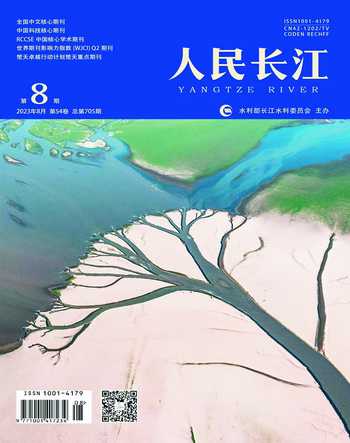
通过分析接缝产生的原因可以得知,接缝开合度监测的本质是测量接缝两侧墙体之间的距离,即水平位移量,张开为正,闭合为负。因此,对接缝开合度变化监测之前,提出建立如下物理等效模型:将接缝两侧视为两个刚体,当两侧刚体发生相对位移时,接缝就发生了开合,如图1所示。将发生相对位移的刚体其中一个视为静止的,当接缝两侧刚体发生横向位移时,可视为刚体B在远离刚体A,接缝就发生了横向展开,刚体上各点也随之发生横向位移。根据刚体平移定理[19-20]:刚体平移时,其上各点运动轨迹形状相同且彼此平行;任一瞬间各点具有相同的速度和加速度,刚体的平移可由其上任意一点运动来代替,刚体的位移可以归结为点的运动。
该模型将选择两个标识物置于接缝两侧,由于标识物形状和灰度更具有特点,可自由选择,相对于直接检测接缝,标识物检测更为容易和准确。标识物上所确定的特征点之间若发生相对位移,即为接缝开合度发生变化。通过与计算机视觉技术结合,既能保留原有的物理意义,又做到了无损检测。
1.2 绘制标识设计
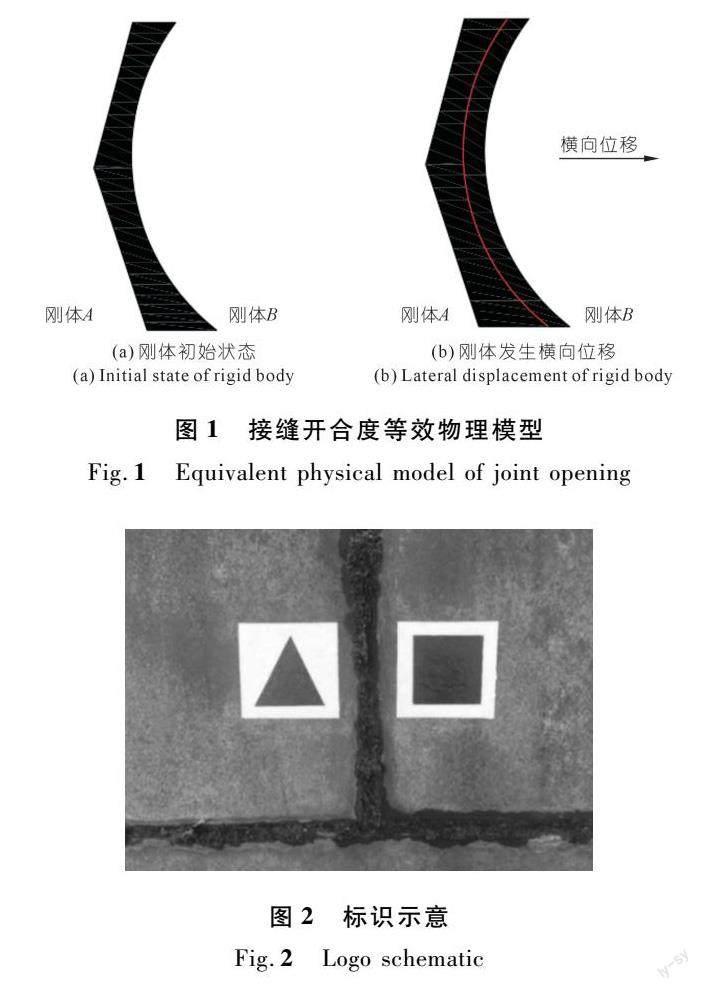
鉴于水库大坝的廊道内存在雾气与渗水,本文拟采用油漆绘制标识的方式实现接缝监测。油漆表面油性不易沾水,在雾气与渗水环境下,不易附着水滴形成污渍,实际应用价值较高;同时,相较批量金属标识,选用环保油漆不仅施工方便,还节约成本。为增强绘制标识在图像中的对比度,易于计算机识别处理,绘制标识采用黑白两色搭配设计,即白色背景,黑色图案。其中,白色边框尺寸为100 mm×100 mm,黑色区域的图形边长均为80 mm。形状遵循图形简单、特征明显的原则,考虑到图像处理中识别一般需要具有清晰明显的角点辅助[21-22],用来求解后续像素解析度,故选取等边三角形与正方形,并将形心作为标识物的特征点,最终标识设计结果如图2所示。
1.3 自动化监测算法
自动化监测算法对图像处理的流程主要为:① 图像数据读取;② 图像预处理(灰度、滤波、增强等);③ 图像配准;④ 图像匹配;⑤ 特征点提取与计算;⑥ 确定转换系数;⑦ 距离比对。具体流程如图3所示。
1.3.1 图像预处理
图像的采集与读取是该方法的第一步,即检测人员利用球型摄像机拍摄现场接缝与标识物,采集到的图像为彩色图像。受到拍摄环境与结构表面的影响,拍摄缺乏统一的背景光强度,图像会在此区域内产生大量噪点,受到信息破损的影响,因此需要对图像进行预处理。分析相关学者研究成果可以发现,针对桥梁、建筑、水坝等结构体缺陷的图像监测算法大多数均采用将彩色图像转为灰度图像的方式来进行预处理[23-24]。综上,本文预处理方法将从彩色图像的预处理出发,然后再对灰度图像进行处理,具体步骤如下:
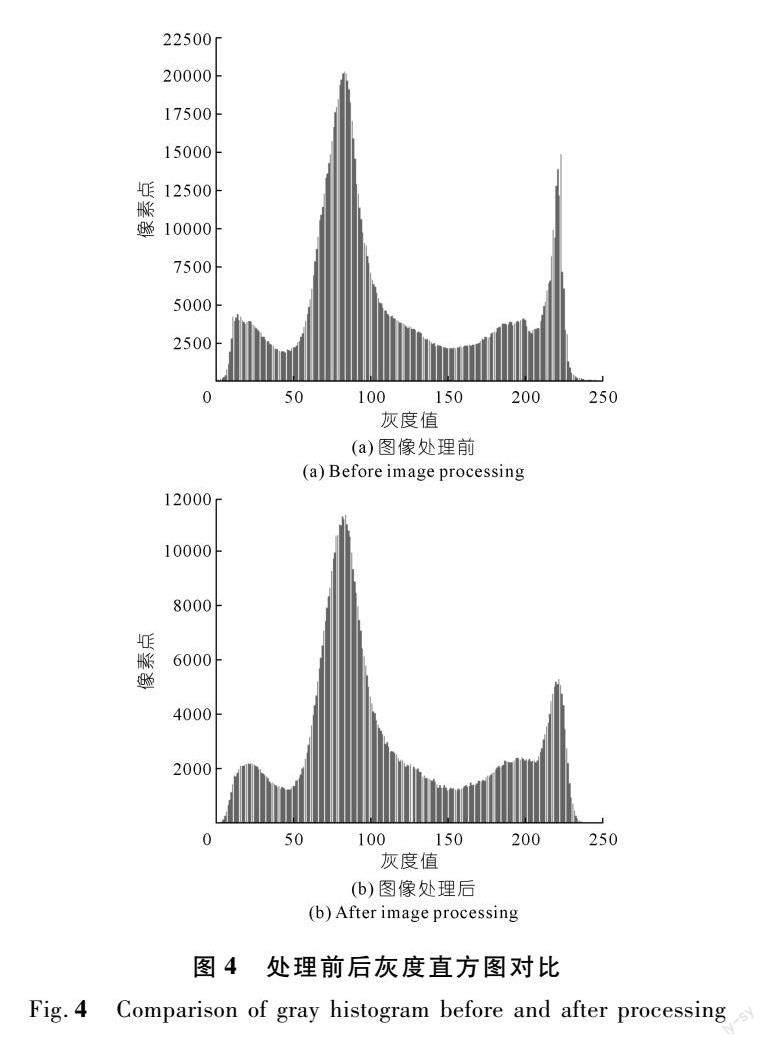
(1) 彩色图像预处理。彩色图像预处理包括平滑滤波与锐化滤波,该技术手段是图像处理领域最为常用的操作。结合去噪效果与处理速度,本文分别选用中值滤波与Prewitt算子对图像进行平滑与锐化滤波。中值滤波属于非线性滤波,中值滤波算法并不十分关注独立像素的属性,其中极大或极小的像素都不会被选作相应替换值,该处理原则可有效避免离散型噪点对图像的干扰,对椒盐噪声有较好的剔除能力[25-26]。Prewitt算子属于梯度锐化,抗干扰能力较强[21],对于本文标识物的直线构造有较好的适用性,可以有效提高边缘清晰度。处理结果前后对比如图4所示,处理效果如图5所示。
对比原图像和其对应滤波后的灰度直方图可以发现,滤波后的灰度图范围更为紧凑,图像信息集中程度更高,处理效果较好。
(2) 灰度图像预处理。灰度图像只有单通道,具有传输效率高、容量占比小等优点,可以去除大量不必要的色彩信息,大大减少后续处理中的计算量。本文采用主流的加权平均法将处理后的彩色图像转为灰度图像[27]。灰度图像预处理包括图像增强与平滑锐化滤波。图像增强的目的是为了进一步加强标识物在图中对比度,突出标识物局部信息[28]。灰度图像一般采用自适应对比度增强算法处理,相比于自适应直方图均衡法,它可以有效避免过度放大图像中均匀区域噪音问题,处理效果如图5(c)与(d)所示。图像增强后,再次利用平滑锐化滤波方法进一步去除残余噪点,达到图像预处理的效果。
1.3.2 图像配准
一个完整监测周期内,检测人员将第一次采集的图像作为基准图像,其拍摄角度与拍摄质量可控,在此图像坐标系中计算的测量值称为初始值,后续测量计算的结果将以初始值作为参考值,来衡量开合度。考虑到实际测量过程中相机可能因外界风力等因素发生轻微抖动,即相机姿态发生旋转或偏移变化,使得采集图像中标识倾斜,进而导致图像坐标系无法统一,测量结果产生较大误差,因此需要对后期采集的变化图像与基准图像进行配准,校正图像姿态。
为了符合接缝测量意义以及避免暴力匹配,本文利用图像中不动点作为配准特征点。图像中不动点为标识物所在区域以外的特征点,即墙面自身具有的特征点,不会随意发生改变,有着良好的稳定性。利用特征點之间距离大小的不同来设定阈值,从而剔除标识物内部的特征点,并结合AKAZE特征点检测将一段时间后采集到的图像与基准图中不动特征点一一对应,利用特征点参数精确求出变换矩阵H,完成图像间校正。以发生极端旋转的图像为例,基准图像A拍摄时间为3月9日,变化图像B拍摄时间为3月10日,校正效果如图6所示。
通过分析图像配准数据,可以看出正确匹配率在85%以上,均方根误差为1.237 5,已能满足图像配准要求,校正效果较好。同时,运行时间为3.17 s,单个特征点检测时间只需0.004 s,花费时间较少,运行效率较高。
1.3.3 模板匹配及形心提取
利用模板匹配及形心提取技术测量接缝开合度的原理如图7所示。
(1) 由球型摄像机获取基准图像A,以基准图像为基础建立直角坐标系,并截取基准图像中标识物所在区域的图像(一般为包含标识物的尽可能小的矩形区域图像)作为模板。
(2) 进行两次匹配:① 对基准图像A模板进行匹配,匹配完成后对标识物进行轮廓识别,获取形心像素坐标分别为x1,y1与x2,y2,计算得到基准图像中标识之间的形心距离作为基准距离,记为d1;② 对间隔t时刻后需要测量的图像B模板进行匹配,获得间隔t时刻后的形心像素坐标分别为x3,y3与x4,y4,计算得到间隔t时刻的图像中标识之间的形心距离作为变化距离,记为d2。由此进一步推出第t时刻形心距离的像素距离变化量d2-d1。
(3) 通过像素解析度求解得出像素大小与实际尺寸的比例系数k,将像素距离变化量与比例系数相乘计算得到接缝开合度。
1.3.4 像素解析度求解
利用角点检测算法将图像中标识的所有角点识别后,按从左至右顺序命名为P1、P2…P7,如图8所示。
2 接缝开合度监测试验验证
2.1 室内试验
2.1.1 试验材料及设备
本次试验的器材有:大华牌球型摄像机1台(性能参数见表2)、百分表和磁性支座各1个、滑台1个、喷漆刻板1个、防锈蚀油漆2桶。球型摄像机的配套电源、路由设备连接方式及试验装置见图9。
2.1.2 试验方案
本次试验方案设计A、B两组,其中A组试验在室内有光环境下进行,B组在室内无光环境下进行,两组变焦倍数均为4倍。每组试验基准图片中油漆图案之间形心距离记为d,移动后得到10组新形心距离:d+2 mm,d+4 mm,d+6 mm,…,d+20 mm,与基准图片形心的距离差即接缝开合度。
本次试验步骤为:① 将绘制的标识物放置在球型摄像机正下方的一定距离,使得球型摄像机能够垂直拍摄到绘制标识物的整个区域,保持绘制标识物位移平面与成像平面夹角不变。② 试验过程中图像采集频率设置为60s。在每个采集周期内,通过转动滑台转轴来绘制标识物的位置,将载有正方形油漆标识的滑台每次朝远离三角形油漆标识方向横向移动2 mm,移动范围0~20 mm。球型摄像机采集得到的图像数据通过网络传输至计算机处理,进行数据分析。③ 将数据分析得到的结果,与实际位移后通过百分表测得的结果进行对比,分析试验过程中此技术的测量精度。
2.1.3 试验结果与分析
根据试验方案设计,A组试验的像素解析度结果在0.661 1 mm/pixel上下浮动,B组的在0.643 2 mm/pixel上下浮动。不同试验组别测量数据如表3所列。
由表3可知,两次试验相对误差平均值分别为0.192%和0.356%,测量绝对误差均小于0.2 mm,其中最大误差为0.15 mm,测量精度较高。通过对误差相对较大的几组图像进行分析发现,影响测量精度的主要因素是设备采集到的图片质量。而图片质量易受光照、目标距离、分辨率等影响,由于本次试验在室内进行,受光照影响较小且目标距离恒定,因此球型摄像机的分辨率与光学变焦倍数是主要影响因素。试验发现在拍摄目标距离较近即光学变焦较大时,误差均较小;相反在光學变焦较小,拍摄目标距离较大时误差随之增大,这是由于拍摄距离缩短,导致图像的像素解析度减小,每一个像素点的精度得到提高,说明此技术在环境较好情况下的测量精度可以进一步提高。
从分组试验结果对比可以看出,无光环境下试验结果比有光环境下更好,这是由于在球型摄像机的红外补光条件下,黑白油漆色差对比更加显著,在图像处理中效果优异。有光环境下,计算机视觉颜色区分不大,在识别中容易出现较多噪点,引起一定误差。这一特性正好符合工程现场中大坝廊道内无光环境,应用可行性较高。
为了更好地说明实际测量值与算法测量值之间相关程度,选取两次试验数据并将实际测量值作为自变量x,算法测量值作为因变量y,拟合结果如图10所示。图中直线表示完美拟合趋势线y=x,计算趋势线拟合程度指标R2分别达到了0.999 95与0.999 97。
从室内试验的结果分析来看,使用轻量化监测技术测量接缝开合度的环境适应性较好,无论在有光还是无光环境下,测量精度都在规范容许误差范围以内[31],验证了此技术的理论可行性与有效性。
2.2 现场试验
现场试验背景依托于浙江宁波市皎口水库大坝14号廊道,该廊道净宽3.5 m,高4.5 m,拱半径1.25 m。本次试验从2022年2月14日起,至2022年6月28日结束,利用现场安装的设备对接缝图像进行间隔性采集工作,处理结果与自动化测量进行比较,分析接缝开合度测量误差。
2.2.1 设备布置及安装
现场试验中选取14号廊道内两处不同的接缝作为测点1和2。在首次巡检时,去除测点附近污渍,并在其两侧安装所需绘制标识。球型摄像机采用海康威视E系列400万7寸23倍红外网络球机,可有效保证无光环境下拍摄清晰度,安装在标识物所在区域正对面。在球型摄像机旁安装电源箱,球型摄像机的供电方式采用与廊道内照明设备共电进行,并通过无线网桥与光纤组合的方式在14号廊道出口汇合,将摄像头的信号传送至管理站监控室监控主机上,整体试验设备布置及安装如图11所示。
2.2.2 试验结果与分析
在规定的任务时间内,本文提出的技术与自动化仪器监测接缝开合度得到的数据结果如图12所示。分别比对测点1与测点2监测结果发现,两者误差均在规范[31]所要求的监测精度(0.2 mm)以内,测点1与测点2的平均误差分别为0.011 4 mm与0.011 1 mm,整体平均误差为0.011 25 mm。通过计算,两测点的误差标准差分别为0.042与0.044,可知测量误差的离散性较小。
如图12所示,算法测量值与自动化测量值重合率较高,且变化波动趋势一致。现场试验中廊道内均为无光环境,试验效果较为理想,这与室内试验测量反馈的结果呈现相同的情况,说明本文提出的监测技术是基本准确的。进一步分析误差发现,测点1和测点2出现较大误差的时间分别是2022年4月28日和2022年2月26日,值分别是0.08 mm和0.07 mm。通过排查当天所采集的照片发现,图像整体在x方向拍摄倾斜度较高,导致像素解析度求解时的比例值不够精确,无法用单个像素表达变化的具体量,对接缝开合度测量影响较大,最终引发误差。结合室内试验分析结果可以推定决定误差的重要参数是像素解析度,其影响因素有光学变焦倍数与拍摄倾斜程度,当采集照片较为稳定时,测量误差也趋于稳定。
现场试验结果表明,本文所述技术符合规范中监测精度要求,实际应用效果良好,可以实现对大坝接缝开合度的定期远程自动监测。
3 结论与展望
(1) 为实现对接缝开合度的长期有效监测,本文提出了利用计算机视觉对接缝开合度进行监测的技术。基于对接缝周边环境的考虑,提出了各类配套子算法,使得该技术对接缝图像的处理具有较高的鲁棒性,保证了测量结果的可靠性和稳定性,并通过室内试验验证了该技术的可行性与有效性。
(2) 现场试验表明,该技术的测量值与自动化仪器测量值波动趋势一致,重合率较高。测量平均误差仅为0.011 25 mm,小于0.2 mm,能够符合实际工程场景并满足现行混凝土坝安全监测技术规范中接缝开合度长期监测的精度要求,应用效果良好,可作为现有接缝开合度监测手段的有力补充。
(3) 在后续的研究中,可基于现场的极端少见工况,如拍摄角度过于倾斜、长远距离拍摄条件等,进行算法优化,提高运行效率,不断增强技术的适应能力;装置层面上可开发稳定球型摄像机拍摄角度的支架,使得每次拍摄的图像中标识物处于同一位置等。
参考文献:
[1] 沈海尧.水电站大坝安全监管创新回顾与展望[J].大坝与安全,2019(1):1-5.
[2] 吴学谦,常耀孔,罗畅.三河口水利枢纽接缝灌浆施工效果分析[J].水利规划与设计,2021(9):115-121.
[3] 谭瀛,马刚,徐建华,等.基于多变量时间序列和LSTM网络的面板缝变形预测[J].人民长江,2022,53(10):198-204.
[4] 蔡天德,谢东辉,房淑莹,等.一种水库大坝坝体接缝变形情况的监测装置[P].CN213120409U,2021-05-04.
[5] 云磊.“635”大坝安全监测自动化系统更新改造[J].人民长江,2017,48(增2):288-290.
[6] 郑云涛.水库大坝安全监测自动化技术研究[J].工程建设与设计,2018(9):149-151.
[7] 陈洁,包腾飞.混凝土拱坝裂缝光纤监测网络的优化[J].水电能源科学,2013,31(2):102-105.
[8] 郑贵林,靳斯佳.基于振弦式传感器的大坝变形检测系统及应用[J].水电能源科学,2013,31(5):67-69,58.
[9] 卓战伟,曹文波.梨园水电站大坝面板表面接缝止水及质量控制[J].人民长江,2016,47(11):55-57.
[10] 陈磊,唐力.三峡大坝接缝灌浆细缝灌区处理分析[J].人民长江,2015,46(10):1-3,37.
[11] 周秋实.三里坪双曲拱坝接触、接缝灌浆施工工艺[J].人民长江,2012,43(6):69-72.
[12] 张伟光,钟靖涛,于建新,等.基于机器学习和图像处理的路面裂缝检测技术研究[J].中南大学学报(自然科学版),2021,52(7):2402-2415.
[13] RAHMAT A,DHARSHAN L G,CHA Y J.Vision-based concrete crack detection technique using cascade features[C]∥Smart Structures and Materials+Nondestructive Evaluation and Health Monitoring,2018.
[14] 肖创柏,柏鳗晏,禹晶.基于Faster R-CNN的缝隙检测与提取算法[J].北京工业大学学报,2021,47(2):135-146.
[15] 方志,彭海涛.基于图像分析技术的混凝土桥梁结构表面裂缝宽度检测[J].湖南大学学报(自然科学版),2012,39(1):7-12.
[16] SATOSHI N,NAO M,TERUYUKI K,et al.Improved digital photogrammetry technique for crack monitorring[J].Advanced Engineering Informatics,2015,29(4):851.
[17] 刘娟紅,孟翔,段品佳,等.基于MATLAB的混凝土裂缝宽度计算方法研究[J].材料导报,2022,36(6):84-89.
[18] 魏海斌,武少威,张启帆,等.基于图像处理的沥青路面裂缝识别算法研究[J].中外公路,2020,40(4):73-78.
[19] 秦晨,张伟仁.刚体平动和刚体定轴转动中力学问题的对比研究[J].大同大学学报(自然科学版),2015,31(4):25-28.
[20] 赵近芳,王登龙.大学物理简明教程[M].2版.北京:北京邮电大学出版社,2013:47.
[21] 杨奇昊.基于图像处理的双标识物裂缝监测系统[D].南京:南京理工大学,2021.
[22] 周鑫.基于数字图像特征的边坡滑动监测系统设计与实现[D].重庆:重庆大学,2020.
[23] 倪彤元,周若虚,杨杨,等.基于智能手机APP的图像法检测混凝土表面裂缝研究[J].计量学报,2021,42(2):163-170.
[24] 房铭坤,付国.基于数字图像处理的混凝土裂缝宽度检测方法研究[J].建筑结构,2019,49(增2):630-634.
[25] TUKEY J.Exploratory data analysis[M].Hoboken:Addison-Wesley,1977.
[26] MARAGOS P,SCHAFER R.Morphological filters-Part Il:Their relations to median order-statistic,and stack filters[J].IEEE Transactions on Acoustics,Speech and Signal Proessing,1987,35(8):1170-1184.
[27] 张德丰.MATLAB 数字图像处理[M].北京:机械工业出版社,2012.
[28] 王浩,张叶,沈宏海,等.图像增强算法综述[J].中国光学,2017,10(4):438-448.
[29] 张宇.基于AKAZE特征的图像配准算法研究[D].南宁:广西大学,2020.
[30] 杨福嘉.基于特征点的图像配准技术研究[D].哈尔滨:哈尔滨工程大学,2019.
[31] 中华人民共和国水利部.混凝土坝安全监测技术规范:SL 601-2013[S].北京:中国水利水电出版社,2013.
(编辑:胡旭东)
Abstract:
Aiming at the problems of low efficiency of traditional joint opening measurement methods,difficulty in long-term monitoring and high cost of automatic measurement,a lightweight monitoring technology for dam joint opening was proposed.According to the established equivalent physical model for joint opening monitoring,a low-cost spherical camera was set up near the joint,and signs were drawn on both sides of the seam.The relative coordinates of the feature points of the markers were obtained through the process of preprocessing,image registration,template matching,etc.After several shots,the relative coordinate changes were calculated and the joint opening was obtained.The results of indoor simulation and field test showed that the measurement was more accurate by this method in the dark environment than in the light,which was in accord with the actual engineering scene.The measurement error of joint opening was less than 02 mm,which met the monitoring accuracy requirements in the specification,the coincidence rate with the measurement results of automatic instruments was high,and the fluctuation trend was basically consistent.This technology has the characteristics of high efficiency,real-time,accuracy and low cost,and has certain practical value for the safety monitoring of reservoir dam structure.
Key words:
joint opening;image processing;logo drawing;template matching