茶鲜叶机械化采收装备与技术研究进展
2023-08-26黄海涛毛宇骁李红莉郑旭霞赵芸
黄海涛 毛宇骁 李红莉 郑旭霞 赵芸


摘要:實现高质量茶鲜叶机械化采收是今后茶叶产业转变生产方式、应对采茶人工老龄化、增强国内外市场竞争力的重要突破口,也是名优茶产业实现全程机械化、规模化和标准化的必由之路。文章总结了中国茶鲜叶采收装备研制现状,将当前茶鲜叶采收机械化装备根据机械采收运动方式划分为剪切式、折断式和提拉式,对其研究进展进行了综述;并在此基础上,结合茶叶机械化采收技术的应用场景,将我国茶鲜叶机械化采收技术归纳为无差别剪切统收技术、选择性采收技术和精准智能采收技术;并提出茶鲜叶机械化采收装备和技术发展建议,为促进名优茶产业发展的采收机械装备研发和机采新技术推广应用提供参考。
关键词:茶鲜叶;机械化采收;装备;智能采收
中图分类号:TS272.3 文献标识码:A 文章编号:1000-3150(2023)08-18-6
Research Progress on Mechanized Harvesting Equipment and Technology for Fresh Tea Leaves
HUANG Haitao, MAO Yuxiao, LI Hongli, ZHENG Xuxia, ZHAO Yun
Tea Research Institute, Hangzhou Academy of Agricultural Sciences, Hangzhou 310024, China
Abstract: The development and technology of mechanized harvesting equipment for fresh tea leaves is an important problem restricting the development of tea industry in China at present. Realizing mechanized harvesting of high-quality fresh tea leaves is an important breakthrough for tea industry to change its production mode in the future, cope with the aging of tea picking workers and enhance its competitiveness in domestic and foreign markets, and it is also the only way for famous tea industry to realize full mechanization, scale and standardization. This paper summarized the present situation of tea fresh leaf harvesting equipment in China, divided the current tea fresh leaf harvesting mechanized equipment into shearing, breaking and lifting according to the mechanical harvesting movement mode, and summarized their research progresses. On this basis, combined with the application scenarios of tea mechanized harvesting technology, the tea fresh leaf mechanized harvesting technology in China was summarized into undifferentiated shearing, unified harvesting technology, selective harvesting technology and precise intelligent harvesting technology. This paper also put forward some suggestions on the development of tea fresh leaf mechanized harvesting equipment and technology, which provided reference for the research and development of harvesting machinery equipment and the popularization and application of new mechanical harvesting technology to promote the development of famous tea industry.
Keywords: fresh tea leaves, mechanized harvesting, equipment, intelligent harvesting
机械化采茶技术发展历史悠久,日本在上世纪初已应用采茶剪刀进行采茶和修剪茶树等活动,前苏联沙多夫斯基于19世纪30年代研制了第一台往复式切割采茶机样机,1965年出现了折断式采茶机,至20世纪70年代切割式采茶机发展成熟并逐渐普及应用,且出现圆盘刀、螺旋滚刀、滚折式等形式多样的机械化采茶机型[1-4]。随着工业自动化程度的提高,自走式、乘坐式采茶机进一步提高了茶鲜叶机械化采收的科技水平和普及率。目前,大宗茶和优质茶鲜叶的采收装备和采收技术已经实现高集成度的自动化和机械化,甚至实现无人驾乘自动采收,以一芽一叶细嫩原料为主的名优茶的鲜叶采收装备和技术也在采收精度、智能化水平、采摘质量和效率等多方面实现突破。本文对我国当前茶鲜叶采收机械化装备和应用技术的研究进展进行综述,并结合茶叶机械化采收技术的应用场景,提出茶鲜叶机械化采收装备和技术发展建议。
1 茶鲜叶机械化采收装备
根据茶鲜叶采收运动方式的不同可以将茶鲜叶机械化采收装备分为3种类型,分别是剪切式、折断式和提拉式。
1.1 剪切式
剪切式采收装备以刀片剪切茶茎的方式进行茶鲜叶采收,根据刀片类型和运动方式主要可分为夹剪式、往复切割式、滚刀式、水平圆盘刀式等几种类型,其中夹剪式通过刀片对向运动剪切茶茎进行茶鲜叶采收,可以应用于小型夹切装备或智能采茶装备的精准定位剪切[5-6];往复切割式通过活动刀片往复运动切割茶茎进行茶鲜叶采收,主要用于大宗茶鲜叶的双人或单人采茶机;滚刀式通过刀片螺旋或者弧形运动方式进行茶鲜叶采收;而水平圆盘刀式通过刀片水平圆周运动方式进行茶鲜叶采收。剪切式采茶机中以往复切割式应用最为广泛,陈根生等[7]研究了其作业参数,工作效率可以达到100 kg/h,采净率高达90%,茶叶破损率一般为27.02%~36.27%。
1.2 折断式
折断式采收装备以一定角度对茶茎进行弯折,使嫩度较高的茶茎受力断开的方式进行茶鲜叶采收,根据弯折的方式不同主要有滚卷折式和挤压折式,其中滚卷折式的弯折角度较大,茶茎断面以折断和撕拉断开为主;而挤压折式的折断角度一般≤90°,茶茎断面以挤压断开为主。据殷鸿范[1]报道,前苏联折断式采茶机通过活动指水平击打呈一定夹角固定指的方式采茶,工作效率可以达到5.0~5.6 kg/h,采净率可以达到60%~75%,茶叶破损(损伤)率可以降至20%。贾江鸣等[8]设计了手持式名优茶嫩梢采摘机械手,模仿手工采茶的卷折拉断动作,其磁钢距离40.04 mm、主动手指转角153.0°、角速度3.38 r/s、平均采摘速度25.2 个/min、平均采摘成功率74.3%。
1.3 提拉式
提拉式采收装备主要通过对鲜叶茎段夹持固定并向上提拉的方式收获茶鲜叶,与手工采茶相仿,可用于智能采茶机器人的仿生机械手采摘。曹兴伟等[9]提出了采茶机械手的采茶技术参数参考目标,其中茶叶采摘效率5~10 kg/h、采净率>98%(茶叶漏采率和老梗率均≤2%)、茶叶破损率<10%(茶叶完整率≥90%)、采摘位置精度≤1 mm、采摘频次80~150 次/min、采摘后的收集率≥99%。
3种类型茶鲜叶采收装备各有优劣(表1),其中剪切式茶鲜叶采收装备的工作效率最高,单位时间收获茶鲜叶量是折断式和提拉式采茶装备的5倍以上;提拉式茶鲜叶采收装备的茶叶采净率最高,可达95%以上,破损率最低,能控制在10%以下,但工作效率较低;折断式茶鲜叶采收装备工作效率与提拉式相当,但采净率较低。
2 茶鲜叶机械化采收技术
根据茶鲜叶采收质量的不同可以将茶鲜叶机械化采收技术分为3种,分别是无差别剪切统收技术、选择性采收技术和精准智能采摘技术。
2.1 无差别剪切统收技术
茶鲜叶无差别剪切统收技术需要配置新梢萌发整齐度、密度、嫩度、节间和叶片夹角适宜的机采茶树品种,并培养良好的机采茶树冠面,以获得具有更高芽叶完整率的茶鲜叶原料。无差别剪切统收技术包括单人采茶機采收技术、双人采茶机采收技术和自走式采茶机采收技术[10]。
2.1.1 单人采茶机(微型采茶机)采收技术
单人采茶机或微型采茶机外形小巧轻便,适用于山坡地面积小的茶园,单人操作,其动力类型和采收作业方式也具有多样性,动力类型包括电动机、分体式汽油机和集成式汽油机等,采收作业方式类型包括往复切割式、剪切式、折断式、滚折式、圆盘刀式等[11]。单人采茶机(微型采茶机)的采收技术特别注重机艺融合,可以通过缩短刀片长度,安装扶叶、导叶辅助装置等提高采摘质量。李维等[12]研究了单人电动采茶机的采摘适期,结果表明单人电动采茶机在茶树冠面以上一芽一叶、一芽二叶标准芽叶比例接近70%时进行机采的效果较好,完整芽叶比例最高可达到37.49%。杜哲等[13]开展了微型电动采茶机的双动割刀往复式切割运动仿真与田间试验,一次切割率为70.55%~79.90%。
2.1.2 双人采茶机采收技术
双人采茶机较适用于茶园面积大的企业生产,需要4人操作,其中主机手和副机手各1人,协助人员2人,其以汽油机作为动力,采收作业方式一般为往复切割式,作业效率较单人采茶机高。石元值等[14]研究表明,双人采茶机的采摘适期一般以茶树冠面以上一芽二叶、一芽三叶标准芽叶比例接近80%时进行机采较好,完整芽叶比例在60.30%~64.91%,机采作业时采茶机刀片应与茶芽生长方向垂直,采摘高度1.5~2.0 cm,行进速度0.5 m/s较为适宜。郝国双等[15]研究了双人采茶机的采摘适宜高度,结果表明双人采茶机在上次茶蓬面修剪高度上提高3 cm采摘时,获得的优质茶鲜叶、完整芽叶率可达55.5%,同时母叶和杂质等占比较少。
2.1.3 自走式采茶机采收技术
自走式采茶机为采茶机械增加了一个移动平台,提高了机械采茶的平稳性,且为辅助功能集成提供了重要的结构支撑,包括适应不同坡度的液压装置、采茶机高度调节装置等,采摘效率、采摘净度和完整芽叶率均大幅提升。韩余等[16]报道了4CJ-1200型跨行自走式采茶机,最优作业参数为:机速0.41 m/s、刀机速比1.06、完整芽叶率为77.41%、漏采率为0.87%、割茬不平度为1.23 mm,各项指标均超过机采茶的标准要求。该自走式采茶机可适应纵向坡度小于18°,横向坡度小于20°,茶树高度在50~120 cm之间的茶园作业,具有较高的采摘质量,为优质茶机械采摘提供了有力支撑。
3种无差别剪切统收采茶装备的技术参数差异较大(表2),其中自走式采茶机的工作效率高达80~100 kg/h,茶叶采净率达95%以上,完整芽叶率高达70%~80%,整体采收效果最好;双人采茶机的工作效率最高,但采净率和完整芽叶率均低于自走式采茶机;单人采茶机的工作效率、采净率和完整芽叶率均为最低,但其单人操作、小巧方便,在山坡地小规模茶园具有较好的应用前景。
2.2 选择性采收技术
选择性采收技术主要根据芽叶生长高度、嫩度、长度等性状指标对芽叶进行差别化选择,以获取相对一致茶鲜叶的采收技术,可较无差别剪切统收技术提高茶芽叶采收质量。
2.2.1 茶芽叶冠层高度感应选择采收
对茶芽叶冠层的感应选择主要通过利用超声波、红外、计算机视觉检测等现代技术来识别茶蓬面芽叶冠层的高度,并据此控制切割刀片始终保持在茶蓬面上方的合理位置来提高茶芽叶的采摘质量,有效消除地形和树冠层高低不平带来的不利影响。农业部南京农业机械化研究所[17]设计了一种跨行手扶自走式智能采茶机,通过超声波传感器可以自动识别茶蓬面高度,并通过电动升降架实时调整往复切割器位置,实现自适应采摘。宋扬扬等[18]报道的履带式智能采茶机提供了一种自动感应切割深度的茶叶筛选感应板来调节采摘总成的高度,提高采摘质量。浙江工业大学发明了一种基于视觉检测的采茶机割刀控制方法,通过采茶机正前方的摄像头采集进叶口茶芽叶采摘情况的图像,在采茶机割刀上预先标定与茶树颜色显著不同的且各自颜色也不同的两个区域,通过检测采集图像中这两个区域的像素点个数,来判定割刀与茶树树冠之间的相对位置,并输出控制信号来自动调节割刀位置与角度[19-21]。吴敏等[22]报道了融合2D激光雷达和航向姿态参考系统的采茶机割刀仿形距离估计方法,提升了测距精度与实时性。田间试验表明,鲜叶采收效率达到180~210 kg/h、割刀覆盖蓬面上鲜叶的平均采收率为92.38%、平均芽叶完整率为85.34%、平均杂质率为4.93%、一芽三叶及以下嫩梢占90.72%,与传统超声波感知的采茶机相比,提升了大宗茶鲜叶采收效果。
2.2.2 茶芽叶嫩度选择采收
曹望成等[23]根据茶芽叶不同节间的弯曲力学特性,研究发现第二节间和第三节间表现出良好的脆性,折断率在90%以上,茶树新梢的这种力学特性为嫩度选择性采茶机的设计提供了依据。早期出现的弹性橡皮采摘指击打成一定角度固定指的方式获得茶鲜叶是嫩度选择采收的一种方式,此后出现了一种折断式采茶机[24],通过拨杆与刀轴配合将茶鲜叶夹持固定,刀轴继续转动,直至刀片与茶叶茎部相抵,形成支点,而拨杆缓冲释放后,即可将茶叶茎部折断。通过折断的方式采收新梢嫩度相对一致的茶鲜叶,并能获得较高的完整芽叶率。浙江新昌县澄潭茶厂[25]设计的一种软辊式仿手工无破损茶叶嫩芽采摘机,将采摘软辊靠近茶叶嫩芽,通过软辊的作用,可以把一定嫩度的茶芽摘下,并输送到收集袋中。
2.2.3 茶芽叶长度选择采收
倪律[2]报道了一种拉割式采茶机,通过梳导轮压板将茶芽叶压倒在梳导板间隔内,压至底刀板上部的钢芯六角橡皮轮时,使茶芽叶在底刀刀刃处被拉拔断裂。该采茶机可以通过六角橡皮轮与底刀刀刃的距离选择超过该间距长度的茶芽叶进行采收,起到“采大留小”的效果。绍兴春茗科技有限公司[26]研究的一种拉切式采茶方法,在采摘时先对符合长度要求的茶芽叶夹持,然后将茶芽叶拉至裁剪点进行裁剪,不符合长度要求的茶叶被挡叶机构阻挡,使其不被裁剪,实现选择茶芽叶长度的采收功能。杭州市农业科学研究院[27]设计了一种滚筒式采茶机,通过二次剪切的方式获得长度较一致的茶芽叶。
2.3 精准智能采摘技术
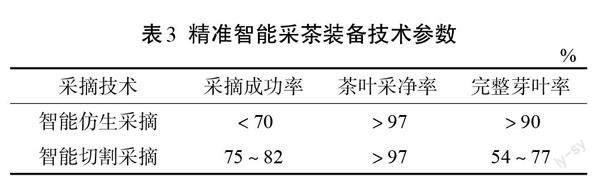
精准智能采摘技术通过计算机对图像进行处理、特征提取分析以识别茶芽叶,并对采收位点进行精准定位,然后驱动机械臂上的采摘器实现对茶芽叶的精准采摘[28-29]。精准智能采摘实现的关键步骤包括芽叶识别、定位、驱动、采摘和收集,其中采摘点的精准定位和采摘器的设计是影响智能采摘技术发展的关键。根据末端采摘器的结构不同大致可以分为智能仿生采摘和智能切割采摘[30]。
2.3.1 智能仿生采摘
智能仿生采摘主要是采用仿生学原理,模仿人手采茶动作,通过提拉、折断、扭断、旋转等方式进行茶叶嫩芽的采摘。刘俊锋等[31]提取新梢R-G-B分量,采用像素分布法和因子迭代法进行新梢和背景区分,利用连通域标记的面积滤波法过滤提取,设计了以STM32为主控芯片的气动控制系统实现采摘指的闭合和提拉动作。郝淼等[32]设计了一种仿生采摘指末端执行器,结构紧凑、小巧,采用气力驱动,通过定位、固定、提拉等动作将新梢嫩芽的茎拉断,室内试验采摘成功率接近70%。南京林业大学[33]设计了一种茶叶仿生手抓末端执行器,通过芯轴在上夹爪开合驱动机构的带动下相对于里层套轴向移动,实现夹爪的开合,夹持茶叶嫩茎并将其拉断,完成对茶叶嫩芽的采摘。许丽佳等[34]設计了基于茶树嫩梢物理学特性的夹持式末端执行器,通过阶梯式四杆机构控制夹持提拉力度可选择不同嫩度芽叶进行采摘,田间试验表明,一芽一叶平均漏采率小于2.8%,平均采摘完整率约91%;一芽二叶平均漏采率小于3%,平均采摘完整率约94%。
2.3.2 智能切割采摘
秦广明等[35]完成了4CZ-12型智能采茶机器人的设计,采用R-G-B算法进行图像处理,获取R-B灰度图像,进行阈值分割,最短处理时间仅为0.228 s,其末端执行器为采摘手爪,其中1个手爪安装刀片,通过四杆连杆机构实现采摘手爪的开合,通过手爪上的刀片剪切茶芽叶进行采摘,田间试验结果表明,平均误识别率为28.7%、单手采摘次数为1.29次/s、整机生产效率(鲜叶)为5.254 kg/h、漏采率2.66%、摘后收集率99.6%、老梗叶率0.8%、茶芽完整率76.6%。罗坤等[36]设计了茶鲜叶嫩梢捏切组合采摘器,单次作业最大时间小于0.6 s,采摘成功率可达100%。周宇杰等[37]报道的采茶机器人采用结构光深度相机获取茶垄的RGB-D图像,应用YOLOv3模型实现茶芽识别,通过3P-Delta机械臂和套筒结构采摘器进行茶芽采摘,田间试验评估机器人平均采摘速率为0.451次/s、采摘率75.53%、茶芽完整率为54.68%。中国农业科学院茶叶研究所[38]设计的一种名优茶智能双臂采茶机,采用高速运转的钢丝绳代替传统往复切割刀片,然后利用吸附的方式将茶叶嫩芽传送到集叶箱。
综上,精准智能采摘技术在芽叶识别、定位和机械驱动等方面有较多共性,智能仿生采摘和智能切割采摘的区别主要体现在茶芽叶的采摘成功率和完整芽叶率(表3)。采用仿生采摘方式的智能采摘技术,其茶芽叶采摘成功率低于70%,但完整芽叶率可以高达90%以上;采用切割方式的智能采摘技术,其采摘成功率较仿生式采摘略高,但完整芽叶率仅为54%~77%,远低于仿生采摘技术。
3 存在问题与发展建议
茶鲜叶机械化采收装备研发和采收技术是我国茶叶生产从劳动密集型生产方式向农业现代化生产方式转变的重要发展方向之一,是我国茶叶产业实现高质量发展的重要途径之一,也是我国茶叶产品增强市场竞争力的重要发展方向之一。目前我国的无差别剪切统收装备和采收技术已经具有较好的发展基础,并在部分颗粒形优质茶的生产上已有规模应用[39],但整体采收机械化程度仍然很低,主要是当前的机采茶鲜叶不能满足优质茶和名优茶生产对高质量茶鲜叶的要求。在选择性采收装备和智能精准采收装备方面的研究尚有不足,特别是在选择性采收装备和技术方面需要加大研发力度,在兼顾效率的同时进一步提高茶鲜叶采收质量,也为名优茶产业提供更多高质量的选择性鲜叶原料。茶鲜叶精准智能化采摘装备和技术也将随着基于深度学习的计算机图像识别方法、高精准度传感器的感知技术、高灵敏度的驱动技术,以及新型采收器的材料、结构及控制方法的改进而不断完善,最终推动我国茶鲜叶机械化采收装备和技术向智能化、现代化方向不断发展,为我国茶叶产业实现高质量发展提供重要支撑[40-46]。
茶鲜叶机械化采收的最终目标是实现高度的无人化、自动化和智能化,解放劳动力,降低生产成本,并提高茶叶质量和市场竞争力。加强茶鲜叶机械化采收装备和技术的基础理论研究,提高装备自主创新能力,强化机械化农艺技术是茶叶产业机械化现代化发展的保障[47]。加快推进茶鲜叶无差别剪切统收装备采收的品种、栽培、管理技术深度融合,实现大宗优质茶类的机械化生产[48-49];加强研发茶鲜叶选择性采收装备和配套生产技术,实现部分名优茶类的机械化生产;不断探索和丰富智能精准采茶各环节的關键理论和技术,形成适用于不同茶叶生产模式和产品需求的科学合理的茶鲜叶机械化采收装备和技术体系,对促进我国茶叶产业的现代化具有重要意义[50-52]。
参考文献
[1] 殷鸿范. 国内外采茶机研究概况及几个问题的探讨[J]. 茶叶科学, 1965, 2(2): 66-71.
[2] 倪律. 国内外采茶机的研究[J]. 粮油加工与食品机械, 1979(1): 17-22.
[3] 权启爱. 采茶机械的研制和我国采茶机械化事业的发展[J]. 中国茶叶, 2018, 40(8): 14-17.
[4] 权启爱. 采茶机械的研制和我国采茶机械化事业的发展(续)[J]. 中国茶叶, 2018, 40(9): 8-12.
[5] 牟顺海, 李少华. 茶叶采摘机器手采摘剪刀设计及仿真[J]. 西南师范大学学报(自然科学版), 2014, 39(6): 55-58.
[6] 江西师范大学. 一种往复切割式采茶机: 109673257A[P]. 2019-04-26.
[7] 陈根生, 尹军峰, 袁海波, 等. 往复切割式机采鲜叶品质特点及其名优绿茶适制品类[J]. 中国茶叶, 2018, 40(7): 1-5.
[8] 贾江鸣, 叶玉泽, 程培林, 等. 手持式名优茶嫩梢采摘机械手设计与试验优化[J]. 农业机械学报, 2022, 53(5): 86-92.
[9] 曹兴伟, 张琦, 秦广明, 等. 采茶机械手结构设计及运动控制研究[J]. 农业技术与装备, 2013(2): 13-15.
[10] 袁海波, 滑金杰, 邓余良, 等. 名优绿茶机械化采摘技术[J]. 中国茶叶, 2018, 40(6): 4-9.
[11] 易文裕, 程方平, 邱云桥, 等. 单人采茶机研究现状与发展趋势[J]. 中国农机化学报, 2020, 41(11): 33-38.
[12] 李维, 向芬, 刘红艳, 等. 单人电动采茶机春茶采摘效果研究[J]. 湖南农业科学, 2014(18): 54-55, 60.
[13] 杜哲, 胡永光, 王升. 便携式采茶机切割器运动仿真与试验[J]. 农业机械学报, 2018, 49(s1): 221-226.
[14] 石元值, 吕闰强, 阮建云, 等. 双人采茶机在名优绿茶机械化采摘中的应用效果[J]. 中国茶叶, 2010, 32(6): 19-20.
[15] 郝国双, 俞燎远, 张再清, 等. 扁形優质绿茶机采机制技术初探[J]. 浙江农业科学, 2019, 60(4): 591-592.
[16] 韩余, 肖宏儒, 宋志禹, 等. 4CJ-1200型跨行自走式采茶机设计与试验[J]. 农业工程技术, 2021, 14(6): 75-84.
[17] 农业部南京农业机械化研究所. 一种智能采茶机: 201418056U[P]. 2015-03-04.
[18] 宋扬扬, 李为宁, 李兵, 等. 履带式智能采茶机的设计与试验[J]. 农机化研究, 2020, 42(8): 123-127.
[19] 浙江工业大学. 一种基于视觉检测的采茶机割刀控制方法: 104063862A[P]. 2014-09-24.
[20] 汤一平, 王伟羊, 朱威, 等. 基于机器视觉的茶陇识别与采茶机导航方法[J]. 农业机械学报, 2016, 47(1): 45-50.
[21] 汤一平, 韩旺明, 胡安国, 等. 基于机器视觉的乘用式智能采茶机设计与试验[J]. 农业机械学报, 2016, 47(7): 15-20.
[22] 吴敏, 郇晓龙, 陈建能, 等. 融合2D激光雷达与航向姿态参考系统的采茶机仿形方法研究与试验[J]. 茶叶科学, 2023, 43(1): 135-145.
[23] 曹望成, 薛运凤, 周巨根. 茶树新梢剪切力学特性的研究[J]. 浙江农业大学学报, 1995(1): 11-16.
[24] 绍兴春茗科技有限公司. 一种折断式采茶器: 214592955U[P]. 2021-11-05.
[25] 浙江新昌县澄潭茶厂. 一种软辊式仿手工无破损茶叶嫩芽采摘机: 203912588U[P]. 2014-11-05.
[26] 绍兴春茗科技有限公司. 一种拉切式采茶方法: 114503829A[P]. 2022-05-17.
[27] 杭州市农业科学研究院. 一种滚筒式采茶机: 212306173U[P]. 2021-01-08.
[28] 孙艳霞, 陈燕飞, 金小俊, 等. 名优绿茶智能化采摘关键技术研究进展[J]. 包装与食品机械, 2022, 40(3): 100-106.
[29] 李杨, 董春旺, 陈建能, 等. 茶叶智能采摘技术研究进展与展望[J]. 中国茶叶, 2022, 44(7): 1-9.
[30] 张智浩, 朱立学, 林桂潮, 等. 名优茶采摘末端执行器关键技术研究进展[J]. 现代农业装备, 2022, 43(3): 7-12.
[31] 刘俊锋, 潘志刚, 陈勇, 等. 高档名优绿茶仿生采摘指气动控制系统研制[J]. 中国农机化学报, 2021, 42(3): 166-170, 188.
[32] 郝淼, 陈勇, 潘志刚, 等. 名优绿茶仿生采摘指研制[J]. 食品与机械, 2018, 34(10): 86-90.
[33] 南京林业大学. 茶叶仿生采摘指: 107006218B[P]. 2019-05-21.
[34] 许丽佳, 刘琦, 代建武, 等. 茶叶嫩梢采摘末端执行器的设计研究[J]. 茶叶科学, 2021, 41(5): 705-716.
[35] 秦广明, 赵映, 肖宏儒, 等. 4CZ-12型智能采茶机器人设计及田间试验[J]. 中国农机化学报, 2014, 35(1): 152-156, 169.
[36] 罗坤, 吴正敏, 曹成茂, 等. 茶鲜叶嫩梢捏切组合式采摘器设计与试验[J]. 农业工程学报, 2022, 38(13): 1-9.
[37] 周宇杰, 吴强, 贺磊盈, 等. 名优茶采摘机器人的系统设计与试验[J]. 机械工程学报, 2022, 58(19): 12-23.
[38] 中国农业科学院茶叶研究所. 一种名优茶智能双臂采茶机: 209268045U[P]. 2019-08-20.
[39] 谷兆骐, 曹婷婷, 陈国荣, 等. 机采与手采鲜叶加工平水日铸茶工艺、品质及成本比较研究[J]. 茶叶, 2014, 40(4): 207-211.
[40] 徐凤如, 张昆明, 张武, 等. 一种基于改进YOLOv4算法的茶树芽叶采摘点识别及定位方法[J]. 复旦学报(自然科学版), 2022, 61(4): 460-471.
[41] 姚波, 汪洋, 李小瑞, 等. 自然环境下嫩芽与茶梗自动分割方法的研究[J]. 黑龙江八一农垦大学学报, 2017, 29(2): 114-117, 128.
[42] 钟岩. 基于机器视觉的并联式自动采茶机控制系统研究和开发[M]. 青岛: 青岛科技大学, 2022.
[43] 孙肖肖, 牟少敏, 许永玉, 等. 基于深度学习的复杂背景下茶叶嫩芽检测算法[J]. 河北大学学报(自然科学版), 2019, 39(2): 211-216.
[44] QIAN C H, LI M Y, REN Y. Tea sprouts segmentation via improved deep convolutional encoder-decoder network[J]. IEICE Transactions on Information and Systems, 2020, 103(2): 476-479.
[45] 汪琳. 基于SCARA机械手的采茶机器人研究[D]. 合肥: 中国科学技术大学, 2020.
[46] 高凤, 陈勇, 车军, 等. 名优茶并联采摘机器人逆向运动学分析[J]. 机床与液压, 2015, 43(15): 7-10.
[47] 王文明, 肖宏儒, 宋志禹, 等. 茶叶生产全程机械化技术研究现状与展望[J]. 中国农机化学报, 2020, 41(5): 226-236.
[48] 陆德彪, 尹军峰. 我国名优绿茶机械化采摘的意义与实现路径[J]. 中国茶叶, 2018, 40(1): 1-4.
[49] 黄藩, 王云, 熊元元, 等. 我国茶叶机械化采摘技术研究现状与发展趋势[J]. 江苏农业科学, 2019, 47(12): 48-51.
[50] 许高建, 张蕴, 赖小燚. 基于Faster R-CNN深度网络的茶叶嫩芽图像识别方法[J]. 光电子·激光, 2020, 31(11): 1131-1139.
[51] 王振武. 面向复杂工况的智能采茶机器人设计[M]. 济南: 山东大学, 2021.
[52] 尹俊方, 孙虎, 冉秋艺. 基于“人-机-环境”系统的智能名优采茶机设计研究[J]. 包装工程, 2021, 42(12): 183-190.
基金项目:国家茶叶产业技术体系(CARS-19)、浙江省农业重大技术协同推广项目(2022XTTGCY03-06)、杭州市农业与社会发展重点项目(202203A06)、杭州市农科院创新项目(2022HNCT-04)
作者简介:黄海涛,男,高级农艺师,主要从事茶树育种与栽培技术研究,E-mail:hthuang309@hotmaill.com
