可调旋转式流体阻尼器参数多目标优化设计
2023-08-25曹晓彦于敏周瑾王运志
曹晓彦,于敏,周瑾,王运志
(南京航空航天大学 机电学院,江苏 南京 210016)
直升机操纵系统的振动来自主旋翼、发动机及传动装置周期性交变力矩产生的振荡载荷.该振动会引起操纵杆抖动,从而导致驾驶员手臂不适.此外,振动会引起操纵系统各连接件的过度变形、摩擦和卡滞,严重时可以导致直升机失控,甚至发生严重的安全飞行事故.为了提高直升机操纵系统的操纵舒适性和降低振动响应,传统的方法通常采用附加被动阻尼器来吸收振动的能量.由于传统的被动阻尼器阻尼系数不可调,很难满足直升机操纵系统在复杂宽频带扰动工况下的需求[1-2].
作为速度相关型阻尼器,流体阻尼器在结构振动控制领域有着广阔的应用前景[3].可调旋转式流体阻尼器作为流体阻尼器家族的重要组成部分,具有阻尼连续可调、减振频带宽、响应速度快、能耗低、散热性能好、吸能效率高、防护性能好、布置方便等优点[4-5],已在履带式车辆悬挂系统[6]、假肢踝关节系统[7]、张力控制系统[8]等领域得到初步的应用.开发阻尼可调范围宽、出力大、成本低的可调旋转式流体阻尼器对于改善直升机操纵系统的减振性能,具有重要的理论意义和工程应用价值[5].
目前,国内外已有很多学者对流体阻尼器的优化设计方法进行了研究.大多学者均将多目标优化问题转化为加权单目标优化问题,得到适合的解[9].利用该优化设计方法得到的最优结构参数只能适用于特定的设计要求,不能为设计人员提供多种结构方案的最优解集.目前研究主要集中于直筒式阻尼器的优化设计,对于旋转式流体阻尼器的多目标优化设计鲜有人研究[10].
处理多目标优化问题常用的方法有NSGAII、多目标遗传算法、多目标粒子群算法、非支配邻域免疫算法等.其中NSGA-II是基于帕雷托(Pareto)最优解的多目标优化算法.由于该算法具有计算复杂度低、寻优速度快、计算精度高等优点,被广泛应用于多目标优化问题中.将NSGAII算法应用于可调旋转式流体阻尼器结构参数的多目标优化设计,其最优解集可为设计人员提供多种结构参数的选择[11].
目前,大多数阻尼器的优化目标主要是力学性能,极少考虑阻尼器因关键公差设计而出现的制造成本问题[12].为了以最小几何公差制造成本实现直升机操纵系统的阻尼减振,本文开发新型的可调旋转式流体阻尼器,对其关键的几何参数进行多目标优化.通过阻尼器样机的力学性能测试,验证了阻尼器参数多目标优化结果的正确性.
1 阻尼器结构及工作原理
开发具有重量轻、阻尼连续可调、吸能效率高等优点的新型可调旋转式流体阻尼器,并将该阻尼器安装在直升机操纵系统的纵向、横向及总距操纵线系中,起到吸收振动和限制操纵速度的作用.该阻尼器主要由壳体、转子叶片、隔板、转阀、支撑螺钉、端盖、连接臂、伺服电机等组成,如图1(a)所示.壳体、隔板和转子叶片将阻尼器内腔划分为4个腔室(A、B、C、D腔).在可调旋转式流体阻尼器的工作腔内填充黏温特性较好的液压油,作为阻尼介质.为了减少阻尼介质的泄露,端盖及转阀上开设有密封装置.阻尼器的径向工作原理如图1(b)所示,当转子叶片逆时针旋转时,左上腔(A腔)和右下腔(D腔)阻尼介质受到叶片挤压,成为高压腔.右上腔(B腔)和左下腔(C腔)被转子叶片拉伸,成为低压腔.油液自A、D腔通过阻尼孔流向转子轴心,在轴心处形成绕转阀的环流,然后分流流向B、C腔.反之,则A、D腔形成低压腔,B、C腔变为高压腔,油液自B、C腔流向A、D腔.阻尼器的轴向工作原理如图1(c)所示(图中的A、B、C、D与图1(b)对应),阻尼器通过伺服电机带动转子主轴中心孔处的转阀(转阀末端为锥形结构)旋转,从而改变阻尼间隙的大小,以便调节阻尼介质的流动速度及方向,获得理想的目标阻尼.主体结构的振动带动连接臂上下摆动和转子叶片正、逆时针转动,使得阻尼介质在4个腔室间交替流动,不断地产生阻尼力矩,达到衰减操纵系统主体结构振动的目的.
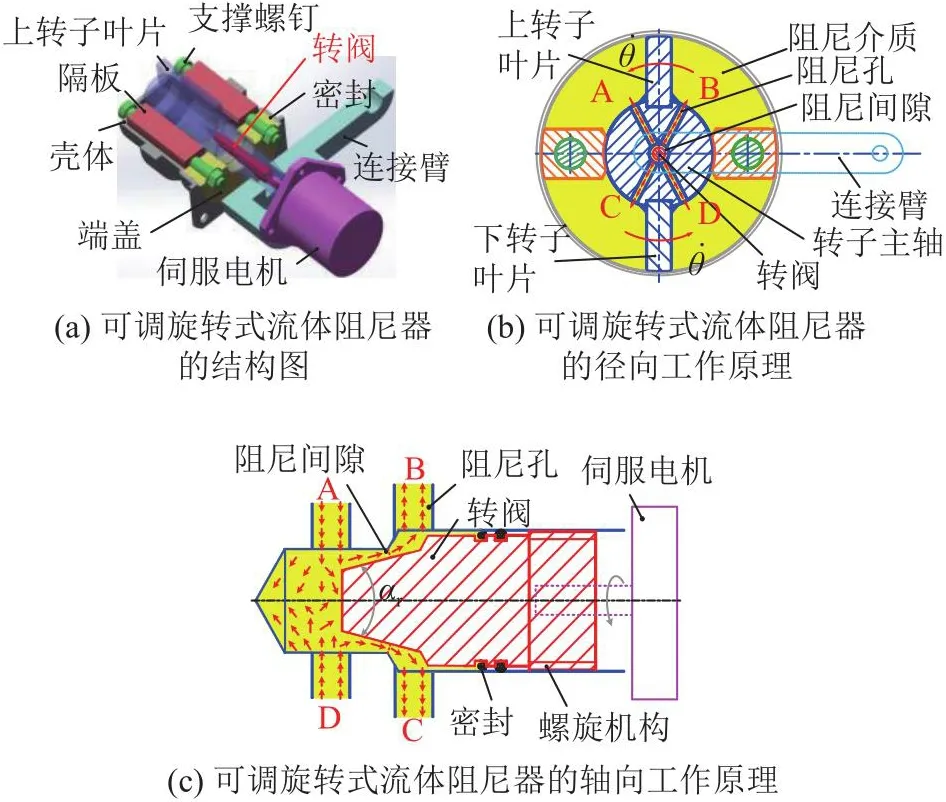
图1 可调旋转式流体阻尼器的设计方案Fig.1 Design scheme of adjustable rotary fluid damper
2 阻尼器的准静态模型
可调旋转式流体阻尼器的阻尼形式是力矩,该阻尼力矩主要来源于转子叶片上受到的液压油均布载荷以及转子主轴与密封件之间的摩擦力矩[13].阻尼器的结构参数如图2所示.图中,Ds为壳体内径,Dr为转子叶片轴颈直径,Ly为转子叶片长度,b1为转子叶片厚度,b2为隔板宽度,dh为阻尼孔直径,lh为阻尼孔长度,δ1为转子叶片与壳体径向配合缝隙,δ2为转子叶片与隔板径向缝隙,δ3为转子叶片端面与壳体轴向缝隙.输出力矩Td可以表示为

图2 可调旋转式流体阻尼器的结构参数图Fig.2 Structural parameter diagram of adjustable rotary fluid damper
式中:Δp为转子叶片两侧的压强差;Tf为转子主轴与密封件相对运动时的库仑摩擦力矩[14],
其中,fc为密封件压缩而产生的轴周单位长度的摩擦力,fc= 87.5 N/mm;Lo为密封件摩擦面的轴周长度;fh为流体压力作用在密封件单位投影面积上产生的摩擦力,fh≈ 0;Ar为密封投影面积.
当阻尼器的结构参数不变时,Td与Δp近似呈线性关系,而Δp可以通过阻尼器内流场的体积流量计算获得.工作腔内阻尼介质的总流量等于单位时间内转子叶片所扫过的体积.阻尼器内流场的总体积流量[15]如下:
式中:ω为阻尼器旋转的角速度.
1)转子叶片上常通阻尼孔的体积流量.当转阀可调间隙大于转子叶片上阻尼孔过流面积时,阻尼器具有最小的阻尼力矩.阻尼孔的直径与流通长度之比lh/dh> 4,因此可以采用细长小孔的节流方程计算,阻尼孔的体积流量[16]为
2)转子叶片与壳体径向之间的缝隙.转子叶片与壳体内径轴向之间缝隙的体积流量为
3)隔板与转子主轴之间缝隙的体积流量.基于平行平板缝隙流量公式可知,隔板与转子主轴之间缝隙的体积流量为
4)转子叶片轴向两端面与壳体之间缝隙的体积流量.基于平行平板缝隙流量公式可知,转子叶片端面与壳体之间缝隙的体积流量为
阻尼器内流场的总体积流量等于各个缝隙体积流量之和,由流体过流量守恒方程可得
式中:qVr为转阀间隙的体积流量.将式(3)~(7)代入式(8),可得不同状态下的Δp.
将Δp代入式(1),可得阻尼器不同状态下的输出阻尼力矩Td.
当转阀处于全闭合时,此时流过转阀处的体积流量为0,可得转阀全闭时的内流场压强Δpc为
此时阻尼器内流场压强最大,相应的阻尼输出力矩最大,将Δpc代入式(1),可得转阀全闭时的阻尼器输出力矩:
当转阀处于全开时,此时流过转阀处的体积流量为阻尼孔的总体积流量,基于式(2)~(8),可得转阀全开时的内流场压强Δpo为
将Δpo代入式(1),可得转阀全开时的阻尼器输出力矩:
此时,阻尼器的输出力矩最小.
3 响应面及灵敏度分析
可调旋转式流体阻尼器的力学特性主要包括最大阻尼力矩Tdc(转阀闭合状态下的出力)及阻尼力矩可调范围λ(即λ=Tdc/Tdo).基于建立的可调旋转式流体阻尼器的准静态模型,在Matlab中建立仿真模型,阻尼器转动角速度ω为0.229 rad/s,分别在结构参数初始值(见表1,其中lr为转阀末端长度,αr为转阀末端锥度)的附近改变Ds、Dr、Ly、b1、b2、dh、δ1、δ2、δ3,可得结构参数变化对阻尼器输出特性的影响规律.

表1 可调旋转式流体阻尼器的结构参数初值Tab.1 Initial value of structural parameters of semi-rotary fluid damper
3.1 最大阻尼力矩响应面及灵敏度分析
当可调旋转式流体阻尼器转阀处于闭合状态时,输出阻尼最大.对于可控流体阻尼器而言,一般要求最大阻尼力矩尽可能大.如图3(a)~(d)所示为转阀闭合状态下阻尼器力矩随各结构参数变化的响应图.随着Ds、Ly、b1、b2的增加,阻尼器的最大输出阻尼力矩逐渐增大.随着Dr、δ1、δ2、δ3的增加,阻尼器最大输出阻尼力矩逐渐减小.其中Ds、δ1、δ2、δ3的变化最明显,说明其尺寸变化对阻尼器最大力矩的影响较大.

图3 转阀全闭时结构参数对阻尼力矩的影响Fig.3 Influence of structural parameters on damping torque when rotary valve is fully closed
参数灵敏度分析可以定量表示输入参数对输出的影响,一般情况下,通过灵敏度分析可以找到对输出有较大影响的参数.参数灵敏度分析的主要方法有扰动分析法、伴随矩阵变量法、OAAT(one-at-a-time,每次改变一个参数)方法和直接微分法等[17].为了定量分析每个阻尼器结构参数对阻尼器输出力矩的贡献率,选用扰动分析法计算各参数对阻尼器输出力矩的灵敏度[18]:
式中:f(z)为灵敏度分析的目标函数,zi为结构参数z在i点的值,Szi为参数z在i点的灵敏度.为了表示区间[zimin,zimax]内的灵敏度,将Szi进行归一化处理,可得
式中:Sz表示设计变量z在区间[zimin,zimax]上的灵敏度,N为变化参数数据采样点的总个数.为了便于对比分析,各个模型参数灵敏度所占百分比SPzj[18]可以表示为
式中:Szj为第j个参数的灵敏度,n为参数的总个数.
各结构参数的灵敏度百分比分析结果如图4所示,Ds的灵敏度百分比为34.35%,占比最高,与图3所示的结果对应.增加Ds,阻尼器最大出力将显著提高.尽管Ds、Ly对阻尼器最大出力的影响较大,Ds、Ly的增加将导致阻尼器体积及质量的增加,这对于低质量、小体积零部件要求较高的直升机来说具有极大的局限性.阻尼器结构优化时,需要对Ds、Ly的最大值加以限定.δ1、δ2、δ3的灵敏度百分比分别为17.41%、14.70%、12.55%,其灵敏度百分比较高,表明调整δ1、δ2、δ3将快速改变阻尼器的最大阻尼力矩.改变各个间隙尺寸δ1、δ2、δ3,基本不增加阻尼器的质量.当优化可调旋转式流体阻尼器最大阻尼力矩时,需要重点考虑缝隙尺寸δ1、δ2、δ3.b1、b2的灵敏度百分比分别为3.83%、3.17%,说明增加b1、b2仅能够小幅提高最大阻尼输出力矩,但这将导致阻尼器的可动行程减小.可动行程对阻尼器非常重要,直接关系着系统的振动幅值.
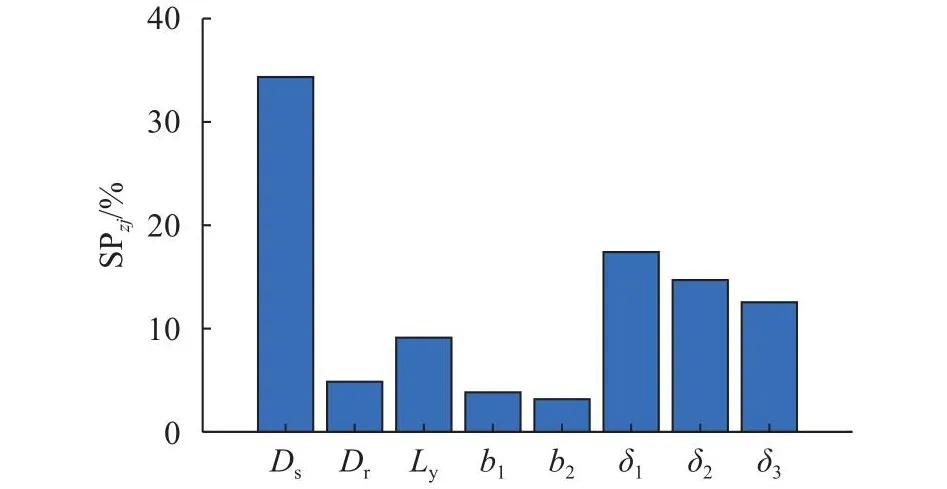
图4 转阀全闭时的结构参数灵敏度分析Fig.4 Sensitivity analysis of structural parameters when rotary valve is fully closed
3.2 阻尼力矩可调倍数响应面及灵敏度分析
可调旋转式流体阻尼器可调倍数为转阀闭合状态与全开状态下阻尼力矩的比值,一般要求可调倍数尽可能大.如图5(a)~(e)所示为阻尼器力矩可调倍数随各结构参数变化的响应面图.随着b1、b2、dh的增加,阻尼器最大输出阻尼力矩逐渐增加.随着Ds、Dr、Ly、δ1、δ2、δ3的增加,阻尼器力矩可调倍数逐渐减小.

图5 结构参数对阻尼力矩可调范围的影响Fig.5 Influence of structural parameters on adjustable range of damping moment
各参数对阻尼力矩可调范围的灵敏度百分比分析如图6所示,其中Ds灵敏度百分比为24.43%,占比最高,说明在优化阻尼力矩可调倍数时需要重点关注Ds.δ1、δ2、δ3的灵敏度百分比分别为22.10%、15.49%、12.75%,占比也较高,说明改变这些结构参数,能够快速改变阻尼器力矩的可调范围.dh、Dr、Ly、b1、b2的灵敏度百分比分别为5.50%、5.64%、6.89%、4.67%、2.53%,总体占比较低,对阻尼器力矩可调范围的影响不明显.
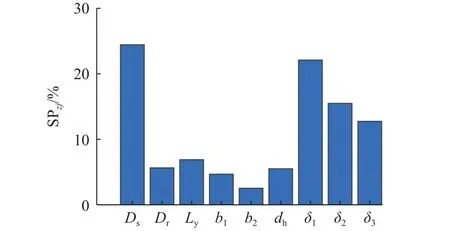
图6 结构参数对阻尼力矩可调范围影响的灵敏度分析Fig.6 Sensitivity analysis of influence of structural parameters on adjustable range of damping moment
4 阻尼器结构参数的多目标优化
4.1 设计需求
所设计的可调旋转式流体阻尼器主要用于直升机操纵系统的减振控制.在实际的应用环境中,直升操纵系统的1阶共振频率约为3 Hz.根据实际工程的要求可知,当激励幅值为1 mm、频率为3 Hz(相应的可调旋转式流体阻尼器角速度幅值为0.229 rad/s)的正弦信号时,需要至少3.5 N·m的阻尼力矩才能抑制共振区域的振动.在阻尼器转动角速度为0.229 rad/s的条件下,旋转式流体阻尼器的最大阻尼力矩需要大于3.5 N·m.当操纵系统处于非共振区时,阻尼力矩越小,系统的振动响应越小,因此阻尼力矩可调倍数越大,表明阻尼器对直升机操纵系统在不同振动工况下的适应能力越强,相应的控制性能越好,可调倍数至少满足6倍以上的设计要求.在满足最大阻尼力矩、可调倍数的前提下,阻尼器关键配合公差制造成本越小越好.
4.2 优化目标
阻尼器的主要优化目标包括3个:最大阻尼力矩、阻尼力矩可调倍数、公差制造成本.
1)最大阻尼力矩Tdc.Tdc尽可能取大值,即转阀闭合状态下的阻尼力矩取最大值,则目标函数f1可以表示为
2)阻尼力矩可调倍数λ.λ应尽可能大,则目标函数f2可以表示为
3)关键配合公差制造成本.阻尼器内流场的配合间隙对阻尼器性能的影响至关重要.若活动配合间隙依靠传统的橡胶类材料进行密封,一旦密封圈失效,则阻尼器无法提供应有的阻尼力,这将直接危害直升机的飞行安全.对于安全性要求较高的直升机操纵系统阻尼器来说,使用阻尼器金属零件间配合间隙进行内流场密封是最安全、可靠的,但给加工制造带来了极大的挑战.由于阻尼器内流场各个配合零件间不允许出现固体结构件间(固体-固体间)的摩擦,否则将极大影响阻尼器的最小阻尼出力,一般要求阻尼器内活动零件间的最小配合间隙为0.01 mm,而最大配合公差需要满足阻尼器的最大阻尼出力及阻尼可调范围的要求.由于航空零部件对于结构尺寸及质量具有较高的要求,该配合公差的精度要求较高,需要进行多次修配才能达到理想的阻尼出力效果.阻尼器内流场的配合公差范围设计得越小,则修配及测试的次数越多,这将极大地延长阻尼器的制造周期.阻尼器零部件的合格率下降,导致加工成本相应提高.在阻尼器设计阶段,对可调旋转式流体阻尼器内流场各配合零部件间的公差进行综合考虑.在满足阻尼器性能要求的前提下,尽可能地增大内流场各配合尺寸的公差(包括δ1、δ2、δ3),实现并行公差的优化设计,可以有效地解决配合公差带来的问题.采用公差评价系数ηt,评估各设计变量的公差水平[19-20]:
式中:k为设计公差变量的个数;Δxi、xiC分别为第i个设计变量的设计公差和基本尺寸;p理论上可以取任意正整数,在实际应用中p可取1或无穷大.当p= 1时,ηt为设计变量的平均公差;当p取无穷大时,ηt为各设计变量的最大公差.为了简化计算,取p= 1.从式(18)可以看出,ηt越大,说明阻尼器允许的变量设计公差越大,相应的制造成本越小.定义阻尼器的公差制造成本目标函数为
对于平板间的缝隙,可以将其量化为类似于圆柱面配合的形式.由于平板类的间隙配合比圆柱面的间隙配合容易,构建阻尼器加工成本函数为
式中:δ1U为转子叶片-壳体径向缝隙配合尺寸的上偏差,δ1L为转子叶片-壳体径向配合缝隙尺寸的下偏差,δ2U为转子叶片与隔板径向缝隙配合尺寸的上偏差,δ2L为转子叶片与隔板径向缝隙配合尺寸的下偏差,δ3U为转子叶片端面与壳体轴向缝隙尺寸的上偏差,δ3L为转子叶片端面与壳体轴向缝隙尺寸的下偏差.综合目标函数可以表示为
4.3 约束条件
b1、b2直接影响阻尼器的转动角度,且这2个参数对最大阻尼力矩、可调范围的灵敏度影响均较小,因此设置这2个参数为表1中的初值.鉴于直升机操纵系统的减振特性需求,µ不作为优化对象,取初始设计值.基于阻尼器的实际工况要求,当阻尼器角速度为0.229 rad/s时,阻尼器最大阻尼力矩须满足Tdc≥3.5N·m.将设计参数(Ds,Dr,Ly,dh, δ1U, δ2U, δ3U)作为优化设计变量,相应的约束条件为
4.4 基于NSGA-II算法的多目标优化设计
由于可调旋转式流体阻尼器待优化的目标函数最大阻尼力力矩f1、可调范围f2、阻尼器配合公差成本f3之间是相互矛盾的,其中某一个子目标函数值的进一步减少都可能会使另外一个或几个子目标函数值升高.在3个子目标函数之间进行折中处理,根据具体的限制条件选取综合性能较优的解.多目标优化问题求得的解不是唯一的,而是一组由众多Pareto解组成的非劣解集.
采用NSGA-II算法对上述多目标优化问题进行优化,与其他多目标优化算法相比,NSGA-II具有鲁棒性好、效率高、解集分布好等优点.NSGAII算法的流程图如图7所示.该算法的运算过程如下.随机产生种群数为N0的初始化种群,经过非支配排序后,通过算法的选择、交叉及变异,获得第一代种群.从第2代种群开始,将父代种群合并到子代种群中形成新的种群,进行快速非支配排序,同时计算非支配层中个体的拥挤度,选取适合的个体形成新的父代种群.判断当前迭代次数是否大于最大允许迭代次数.若没有,则继续遗传操作,直到满足结束条件并输出Pareto解集,获得目标函数及阻尼器结构参数的结果[21-22].
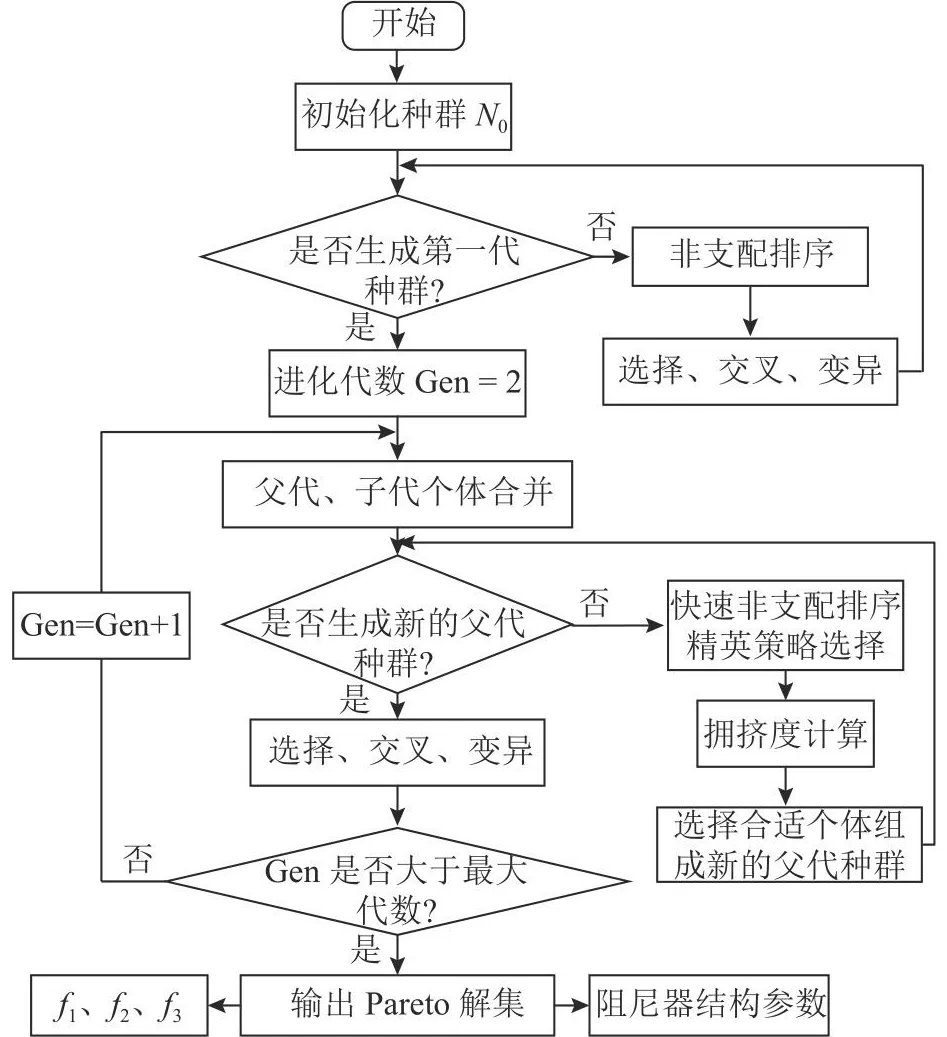
图7 NSGA-II的求解流程图Fig.7 Solution flow chart of NSGA-II
NSGA-II算法的主要参数如下:初始种群数为80,最大迭代次数为500,交叉概率为0.8,变异概率为0.01.通过编写NSGA-II算法的优化算法,可以得到如图8(a)所示的Pareto解,各非劣解均匀分布在Pareto前沿面上.结果表明,3个优化目标(f1,f2,f3)之间相互制约,无法同时满足3个优化目标达到最优解.NSGA-II算法具有较强的收敛性能和搜索能力,解集可以为设计人员提供多种备选方案[23-24].

图8 Pareto解集的分布及投影图Fig.8 Distribution and projection graph of Pareto solution set
结合直升机操纵系统减振控制的实际工况,要求可调旋转式流体阻尼器转阀闭合状态下的阻尼力矩不能小于3.5 N·m,需要从Pareto解集中筛除f1>-3.5的解,将剩余的Pareto解集分别投影到(f1,f3)平面和(f2,f3)平面内,可得非劣解子集的投影,如图8(b)、(c)所示.f1与f3之间近似为线性关系,随着f1的减小,f3总体上呈增大的趋势,说明优化后的阻尼器力矩与阻尼器公差成本存在一定的负相关性.随着f2的减小,f3总体上呈增大的趋势(除个别非劣解外),说明优化的阻尼器力矩与阻尼器公差成本之间存在一定的负相关性.
基于公差成本目标函数最小的原则,在重新排序后的Pareto解中选取同时满足f1< -3.5和f2<-6的3组非劣解(见图8(b)、(c)中的圆圈)进行分析,对应的3组目标函数值如表2所示,相应的优化后参数如表3所示.序号2的公差成本最小,因此将其作为多目标优化的最优解最合理.由于dh、Ds、Dr、Ly为非整数,对其进行修正处理.对dh进行四舍五入后直接取整数为2 mm;Ds取整后为49 mm,Dr取整后为20 mm,Ly取整后为39 mm,最终参数如表3所示.表2给出修正后各个目标函数的取值.
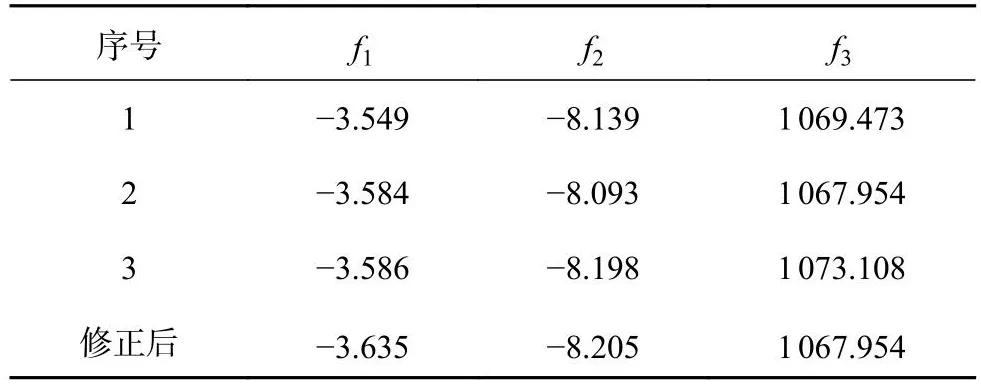
表2 选取的Pareto解Tab.2 Selected Pareto solution

表3 选取的Pareto解的结构参数值Tab.3 Structural parameter values of selected Pareto solution mm
经过多目标优化后,阻尼器的理论最大阻尼力矩为3.635 N·m (>3.5 N·m),阻尼器的理论可调倍数为8.205(>6)倍,满足阻尼器力学性能的设计要求.阻尼器的公差制造成本为1 067.954,在Pareto解集的可行域中属于比较小的值(见图8(b)、(c)),表明阻尼器的关键公差设计在满足力学性能要求的前提下达到最优解.
为了分析阻尼器参数多目标优化的效果,对优化后的阻尼器力学特性进行仿真分析.从图9可以看出,随着角速度的增大,最大阻尼力矩(转阀全闭)呈线性增加,最小阻尼力矩(转阀全开)增加不明显,基本维持在库仑摩擦力(0.443 N·m)附近.从图10可以看出,随着角速度的增大,阻尼器可调倍数逐渐增大,这与图9的分析结果相对应.

图9 阻尼力矩随角速度的变化Fig.9 Variation of damping torque with angular velocity
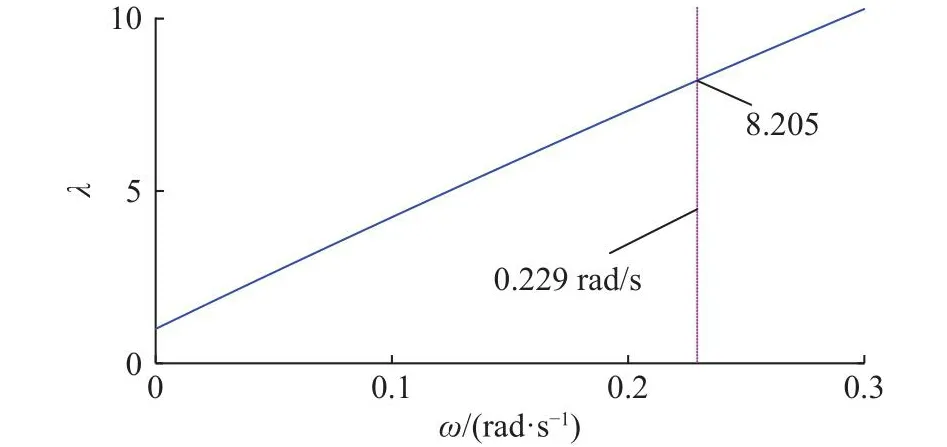
图10 可调倍数随角速度的变化Fig.10 Adjustable multiplier changes with angular velocity
5 力学性能试验研究
5.1 测试装置与测试方法
为了验证优化后半主动旋转式流体阻尼器的最大阻尼力矩、可调倍数是否满足要求,基于阻尼器优化后的结构参数制作阻尼器样机,如图11所示.该样机主要由阻尼器本体、连接臂、伺服电机、支座等组成.

图11 阻尼器样机图Fig.11 Diagram of damper prototype
利用MTS试验机及曲柄滑块机构,对阻尼器的力学性能进行测试,如图12(a)所示.MTS试验机配备了力传感器和位移传感器,以采集阻尼器的输出阻尼力和位移信号.阻尼器壳体通过螺钉与阻尼器支座固定,阻尼器支座通过单头螺柱与MTS试验机下夹具相连接,滑块与MTS机器上夹具连接.测试前,将阻尼器连接臂定位在水平位置(即阻尼器的中间位置),以避免超过其最大行程.实验装置的工作原理如图12(b)所示.图中,θ和γ分别为连杆臂、连杆相对于水平方向的夹角.连杆臂和连杆采用轻质铝合金材质制作,不考虑质量和惯性力.

图12 阻尼器测试装置图Fig.12 Diagram of damper test setup
当滑块的初始位置为水平位置时,θ = 0,滑块质心到A点的垂直距离H= 114.89 mm.当滑块位移为x时(x为位移传感器测得的位移),曲柄滑块机构的运动学公式可以表示为
式中:LAB为连接臂AB的长度,LAB= 80 mm;LBC为连杆BC的长度,LBC= 140 mm.
利用MATLAB可以解得不同时刻的θ、γ.激振力F在A点施加的外力矩为
式中:F为连杆LBC传给减振器拉臂的激振力.
5.2 试验结果及分析
采用振幅为1 mm、频率为3 Hz的正弦信号作为激励.伺服电机的角位移为0°、30°、60°、90°、120°、150°、180°,其中0°为转阀全开时的角度,180°为转阀全闭时的角度.不同电机角位移下的动态响应测试结果如图13所示.从图13(a)可以看出,阻尼器最大阻尼力矩随着电机角位移的增加而逐渐增大,这是因为转阀处节流间隙的减小导致阻尼器内流场压强增大,从而使阻尼力矩变大.通过对实验数据的分析可知,0°时的最大阻尼力矩为0.617 N·m,180°时的最大阻尼力矩为3.997 N·m,由此可以计算得到最大阻尼力矩可调倍数为6.478倍,满足设计要求.从图13(b)可知,阻尼器力矩-角速度曲线存在一定的非线性和滞回特性,这主要是因为阻尼介质的剪切稀化特性和液压油中气体的可压缩性造成的.当阻尼器的角速度为0.229 rad/s时,0°时的阻尼力矩为0.561 N·m,180°时的阻尼力矩为3.855 N·m,由此可以计算得到角速度为0.229 rad/s时的可调倍数为6.872倍.通过以上分析可知,阻尼器的力学性能均满足设计需求.

图13 阻尼器性能测试的结果Fig.13 Results of damper performance tests
本文所使用的优化方法突破了传统阻尼器优化设计仅关注阻尼器最大出力和可调范围的局限,为阻尼器在满足力学性能要求的前提下降低制造成本提供了设计方法.
6 结 论
(1)针对传统直升机操纵系统被动阻尼器减振效果差的缺点,本文提出新型的可调旋转式流体阻尼器.该阻尼器通过伺服电机带动转阀实时调节阻尼器出力,实现直升机操纵系统的阻尼减振控制.
(2)基于质量守恒定律建立阻尼器的准静态模型,分析阻尼器结构参数对最大阻尼力矩、可调倍数的影响规律.其中,壳体内径对最大阻尼力矩和可调倍数的影响均较大,灵敏度占比分别为34.35%、24.43%.
(3)为了协调阻尼器最大阻尼出力、动态可调范围及阻尼器公差制造成本之间的关系,建立阻尼器的优化目标和约束条件.运用NSGA-II算法对阻尼器进行多目标优化设计,确定阻尼器的最优设计参数.
(4)基于优化后的设计参数,制作阻尼器样机,开展力学性能的测试.当角速度为0.229 rad/s时,阻尼器最大力矩为3.855 N·m,可调倍数为6.872,验证了多目标优化结果满足设计要求.
