输电线路纵联电流差动保护仿真设计
2023-08-21张静静张克辉杜明轩李若舟刘思雨李霜霜
王 磊 张静静* 张克辉 杜明轩 李若舟 刘思雨 李霜霜
(1.河北建筑工程学院,河北 张家口 075000;2.河北华电石家庄鹿华热电有限公司,石家庄 050200)
0 前 言
继电保护技术和继电保护装置组成的系统一起构成了电力系统继电保护.电力系统继电保护在保障电力系统安全稳定和经济运行等方面有着及其重要的作用,因此,它是电力系统的重要组成部分[1].目前,大规模联合电力系统越来越普遍,现代大电网的结构和运行方式也趋于多样化,正因如此,继电保护的要求必须越来越高才能保证系统运行的安全性和可靠性[2].因此,灵敏度高、可靠性好的电流差动保护得到了广泛的研究[3].
本文在研究输电线路纵联电流差动保护基本原理的基础上,在Matlab的Simulink仿真平台建立一次系统模型和保护模型,利用Matlab的图形用户界面GUI设计了仿真界面,通过界面输入参数,仿真波形可以很直观地显示在界面上,使验证保护的动作特性更方便、快捷.
1 纵联电流差动保护概述
1.1 纵联电流差动保护的原理
输电线路纵联保护装置,能够将线路一侧的电气量传输到另一侧去,使得线路两侧之间建立纵向的联系[4].
电流纵联差动保护示意图如图1所示,流过差动继电器的电流时电流互感器二次侧电流的和,由于两个电流互感器总有励磁电流的存在,并且励磁特性不会完全的一样,所以正常运行或是区外故障时,流过差动继电器的电流并不会为零,我们称这一电流为不平衡电流.若考虑励磁电流的影响,二次侧电流的数值为:

图1 电流纵联差动保护示意图
(1)

(2)
继电器正确动作时,差动电流Ir应躲过正常运行或是区外故障时的不平衡电流,也就是:
(3)
在工程应用中,不平衡电流的稳态值要采用互感器的10%的误差按式(4)计算:
Iunb=0.1KstKnpIk
(4)
式中:Kst──电流互感器的同型系数,若两侧的互感器型号和容量都相同时取0.5,不同则取1;Knp──非周期分量系数;Ik──区外故障时两个电流互感器的电流.

1.2 输电线路纵联电流差动保护的特性分析
输电线路纵联电流差动保护有不带制动作用和带有制动作用的两种动作判据,如果纵差保护满足灵敏度要求,一般采用不带制动作用的纵差保护,如果纵差保护不满足灵敏度要求或者对灵敏度有更高的要求时,通常要采用的纵差保护要带有制动特性.两种动作判据的简要分析如下:
(1)不带制动特性的差动继电器特性
这种差动继电器的动作方程为:
(5)
式中:Ir──差动继电器中流过的电流;
Iset──差动保护的动作电流整定值,其值通常按躲过外部短路时的最大不平衡电流和躲过最大负荷电流两个条件来选取.取按这两个条件选取的整定值中较大的一个作为差动继电器的整定值.
(2)带制动作用的差动继电器动作特性

(6)
式中:K──制动系数,可在0-1之间选择;
Iop0──克服继电器动作时出现的机械摩擦或保证电路状态发生翻转需要的一个很小的门限值,远小于无制动作用时的Iset.
这种动作电流随制动电流变化的特性被称为制动特性.它既提高了内部故障时的灵敏度,又提高了外部故障时不动作的可靠性,因而在电流差动保护中得到了非常大的应用.
2 纵联电流差动保护仿真
2.1 建立双电源输电线路系统模型
利用Matlab/Simulink搭建的双电源单回线仿真模型如图2所示.

图2 输电线路纵联电流差动保护的主系统
2.2 输电线路纵联电流差动保护仿真系统的构成
提取线路仿真部分的结果,对其进行一定的整理、分析、运算便可以实现动作行为的仿真.根据M侧电流(图2左侧电源电流)在发生各类故障都会产生变化的特性,可以设计出故障启动元件和选相元件;根据M侧和N侧电流(图2右侧电源电流)在不同故障时电流向量和不同的特性,可以设计出差动保护元件.这些元件按照一定的工作顺序进行工作便可以构成最终的差动保护动作行为的仿真.如图3所示,给出了输电线路纵联电流差动保护仿真系统的逻辑框图.需要指出的是,此处运用启动元件与差动继电器的共同作用来实现差动保护,可以使保护更加的安全可靠,防止了保护的误动作.
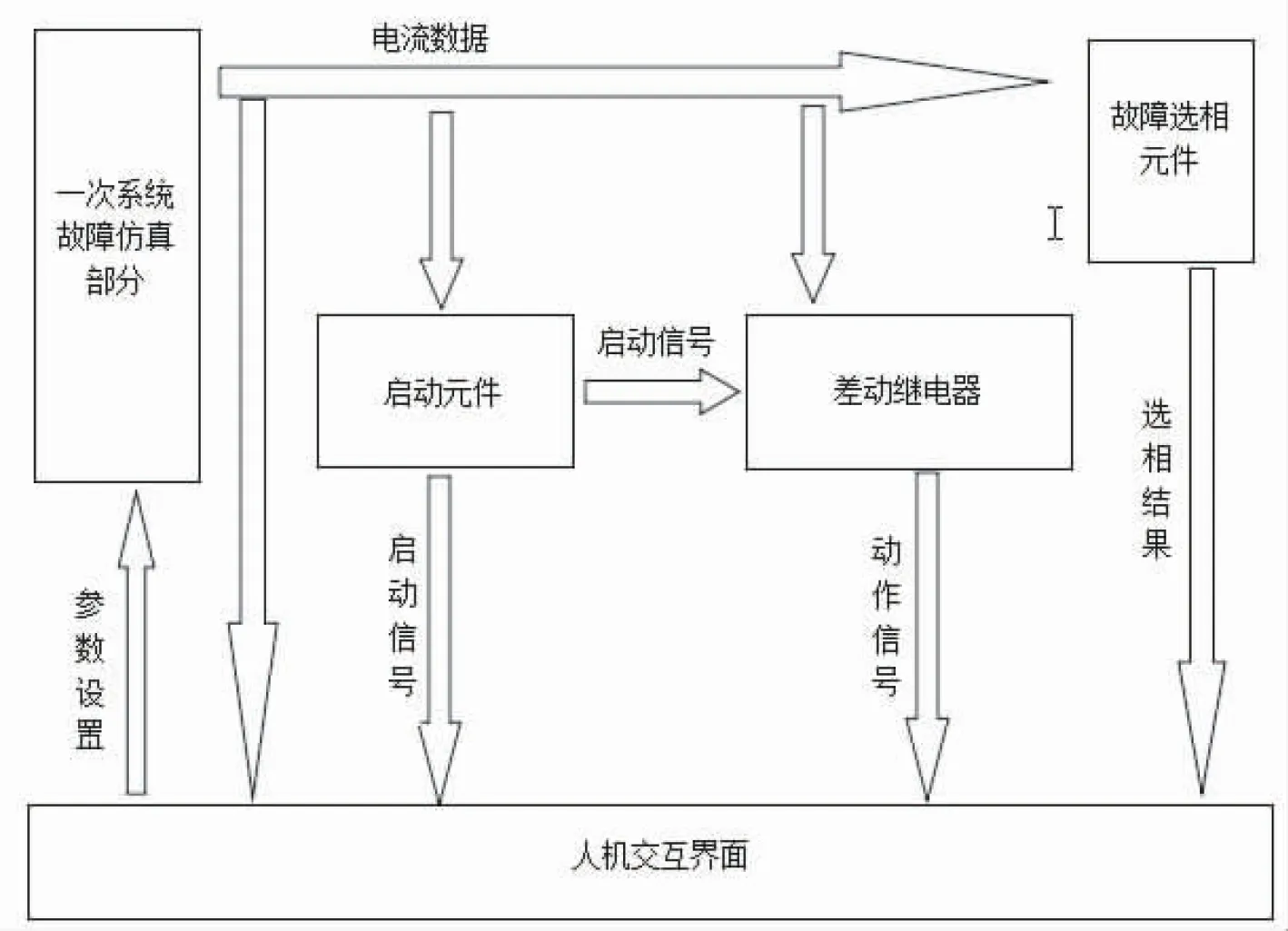
图3 输电线路纵联电流差动保护仿真系统的逻辑框图
这些元件的工作顺序为:由双电源输电线路一次系统模型模拟故障,提取故障后的双端三相电流;线路M侧的三相电流送至启动元件内,启动元件会对其进行计算,如果计算结果满足启动条件,则为发生故障,启动元件会输出启动信号,允许差动继电器动作;线路M侧的三相电流送至选相元件内,选相元件对其进行计算和判断,选相元件会判断出满足什么相故障,并作出相应的选相结果;M侧和N侧的电流同时送至差动继电器,差动继电器对其进行计算和判断,若符合差动继电器的动作的条件,结合启动元件的启动信号,差动继电器输出动作信号,若不符合差动继电器的动作条件,即使有启动信号,差动继电器也不会输出动作信号.
2.3 启动元件
启动元件有很多种,例如:电流元件、阻抗元件、负序和零序电流元件、相电流差突变量元件等.相电流差突变量元件在保护中更加可靠,所以在此采用相电流差突变量元件作为启动元件.
相电流差突变量元件的判据为:
(7)
式(7)所列出的启动判据在实际中会由于频率的波动而产生误动现象,所以在实际运用中需要对式(7)进行一定的完善,即:
(8)




2.4 故障选相元件
目前,稳态量选相与突变量选相两者相结合的选相方式已经证明了具有很大的优势,所以高压线路的故障选相大多选择这种方法[5].如图4给出了故障选相元件原理流程图.
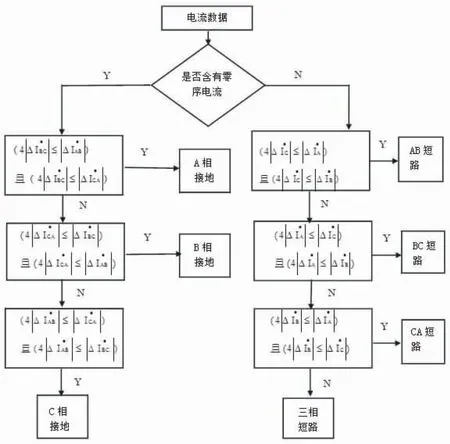
图4 故障选相元件原理流程图
2.5 差动继电器
电流差动保护的分析方法很多,可归并为两类:一类通常被称为制动特性分析法,它需要测量出差动电流ID和制动电流IR,并对差动电流和制动电流进行适当的比较和分析;另一类是以动作条件下两端电流IM和IN的相互关系表示,在这一类中广泛应用的有幅值特性分析法和相位特性分析法.制动特性分析法有一定的优点,就是能够直接看出差动保护动作值的变化规律以及灵敏度裕度,但它也有很大的缺点,就是被保护元件两端电流的关系不能在差动保护动作条件下直接给出.但是,后一类则弥补了这一缺陷[19].所以我们采用式(6)作为搭建差动继电器的判断方程,根据仿真的需要,K取值为0.7,Iop0取值为1.5,以A相为例搭建的继电器模型如图5所示.差动继电器的最终模块如图5所示,其中加入一个与门,通过它与启动元件部分相连.差动继电器与启动元件共同作用可以保障差动继电器的可靠工作,有效的防止了差动继电器的误动作.

(a)A相继电器模型

(b)差动继电器最终模型图5 差动继电器部分模型图
2.6 人机交互界面
利用Matlab软件可以建立人机交互界面,如图6所示.通过人机交互界面可以进行主系统参数的设置和修改以及故障的设定等,方便了仿真系统的参数设定和结果演示.

图6 人机交互界面
3 仿真结果与分析
以区内A相接地短路故障为例进行仿真.在故障类型出选择区内A相接地短路,并输入适当的参数,单击开始仿真进行仿真,会弹出仿真结果.
图7所示为动作情况,从上至下依次是M侧电流、N侧电流、启动信号、差动继电器信号.可以看到发生区内单相接地故障时,M、N两侧故障相电流增大,非故障相电流不变;启动信号和差动继电器均跳变,输出保护的动作信号.

图7 人机交互界面动作情况运行结果
如图8所示是故障选相结果,由上至下分别为A相接地、B相接地、C相接地、AB短路、BC短路、CA短路,可以看出A相接地故障器发生跳变,其余故障器均不动作,则类型选相结果为A相接地故障.
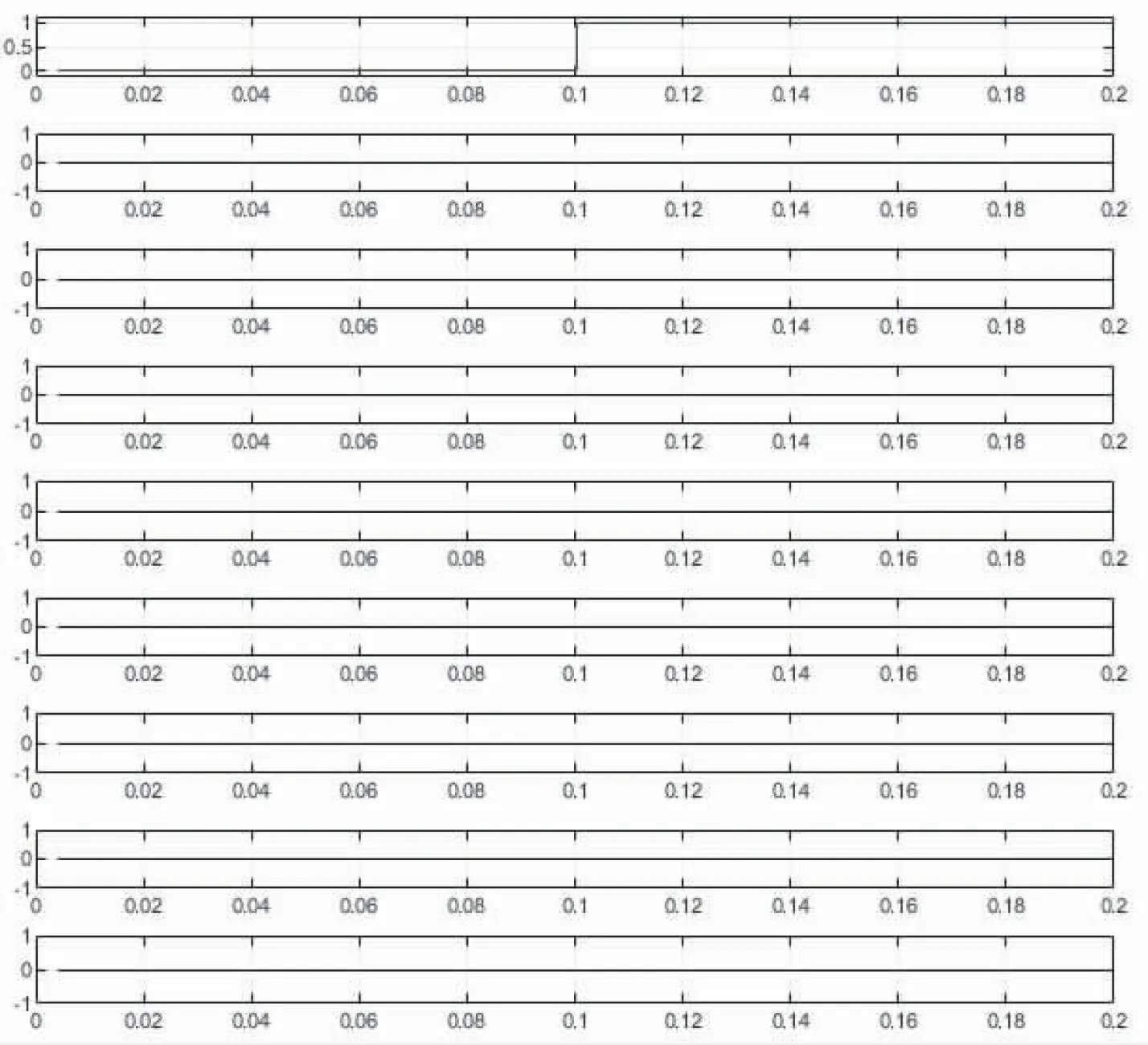
图8 人机交互界面选相结果
从结果来看,人机交互界面可以正常运行并仿真得到结果.通过人机交互界面还可以改变相应的参数并进行不同故障的仿真.
4 总 结
本文在Matlab的Simulink仿真平台上建立纵联电流差动保护仿真模型,利用Matab的GUI设计了人机交互界面,通过人机交互界面设置参数进行仿真,仿真结果表明区内故障保护可以正确动作,验证了纵联电流差动保护的动作特性,并且有利于课堂教学演示和后续的科研研发.