一种角度传感器的结构设计与性能验证
2023-08-18韩玉萌韩嘉骅
韩玉萌 韩嘉骅
摘要:操纵杆的工作状态和实时角度等信息是工程机械控制系统的关键参数,其中,角度传感器是获取此种参数的关键部件,为此,设计了一种适用于操纵杆的新型非接触角度传感器。首先,在结构上,使运动部件与电气组件空间分离,经测试达到IP68的防护等级;通过外壳和背板配合实现电路板的双重固定,无需连接件和连接工序,装配方便;通过扇形柱实现机械定位,且修改扇形柱圆心角度数可任意调节转动范围。此外,选择了合适的磁钢,通过仿真验证其合理性。通过向霍尔芯片写入传感器磁系统、温度漂移系数及磁场强度偏移量的方式补偿传感器,并利用线性化工具校正输出以减小对线性误差的影响。通过实验验证性能并与Elobau的424ZE120传感器作比较。结果表明,所设计的基于霍尔效应的GD-868ZE120传感器具有良好的性能,能满足工程机械及其他大部分工业场所的使用要求。
关键词:非接触式;霍尔效应;操纵杆;结构设计;角度传感器
中图分类号:TN98 文献标志码:A doi:10.3969/j.issn.1006-0316.2023.03.008
文章编号:1006-0316 (2023) 03-0047-08
Structural Design and Performance Verification of an Angle Sensor
HAN Yumeng,HAN Jiahua
( School of Mechanical Engineering, Sichuan University, Chengdu 610065, China )
Abstract:The working state and real-time angle of joystick are the key parameters of construction machinery control system. To obtain such parameters, a new non-contact angle sensor is designed. First of all, by separating the moving parts from the electrical components in space, it reaches the protection class of IP68. The double fixation of the circuit board is realized through the cooperation of the shell and the back plate without connecting parts and connecting processes, which simplifies the assembly and makes it become convenient. The mechanical positioning is realized through the sector column, and the adjustable rotation range is achieved by modifying the degree of the circle center angle of the sector column. In addition, an appropriate magnetic steel is selected and its rationality is verified by simulation. The sensor is compensated by writing the temperature drift coefficient and magnetic field strength offset of the sensor magnetic system to the Hall chip. Linearization tools are used to correct the output so as to reduce the influence on the linearity error. The performance is experimentally verified and compared to Elobau's 424ZE120 sensor. The results show that the GD-868ZE120 sensor based on Hall effect has good performance, which meets the application requirements of construction machinery and most other industrial places.
Key words:non-contact;hall effect;joystick;structural design;angle sensor
操纵杆是工程机械中的重要控制部件,其工作状态和实时角度等信息是工程机械控制系统中的重要参数[1],该参数主要由角度传感器采集。角度传感器决定该参数的准确性,进而影响工程机械的精准控制。磁电式角度传感器是当前角度传感器发展的重要方向[2],较普通电位计寿命长[3],在角度参数测量方面具有广大的应用前景[4]。工程机械上使用的传感器容易受到盐雾、水汽等的侵害。现有传感器虽提高了密封性,但或未将磁钢与电气组件分离[5];或以比较复杂的结构实现分离,但磁钢的旋转及精准定位都需借助齿轮啮合方可完成[6]。且部分传感器为使电路板固定可靠还采用了热铆工艺,加工生产较为不便[7]。此外,温度变化也会对传感器的输出特性产生影响[8-9]。
针对以上问题,本文提出一种新型结构的霍尔角度传感器,以比较简单的结构实现磁钢与电气组件的分离、转动端相对传感器主体的位置限定、良好的密封性以及电路板的固定。其次结合所设计的结构对磁钢进行选型,并对該磁钢作用下传感器的线性度进行仿真。此外,还将温度因素考虑在内,采集传感器在不同温度下的磁场分量,利用软件计算磁钢温度漂移系数补偿传感器,并用线性化工具优化输出。最后通过搭建实验台测试,采集本文所设计的GD-868ZE120传感器和424ZE120传感器的输出数据进行分析,比较各项性能。结果表明,本文所设计的传感器具有良好的性能。
1 传感器设计及工作原理
1.1 角度传感器结构设计
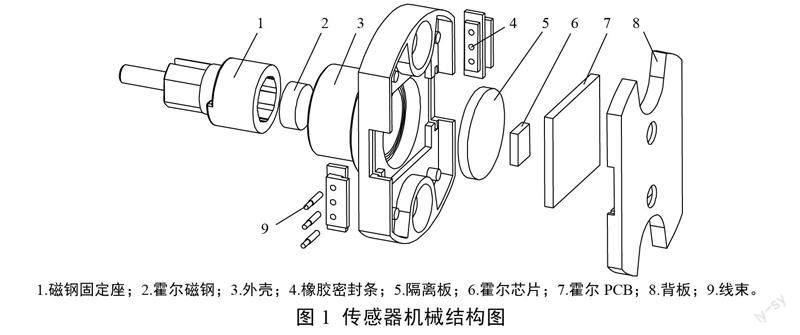
本文设计了一种基于霍尔效应的非接触式角度传感器,脱离了摩擦接触,有效改善了传统电位器寿命短的弊端,整体结构如图1所示。
1.磁钢固定座;2.霍尔磁钢;3.外壳;4.橡胶密封条;5.隔离板;6.霍尔芯片;7.霍尔PCB;8.背板;9.线束。
图1 传感器机械结构图
传感器主要由保护壳、转动组件及电控组件组成。保护壳包括外壳、背板及橡胶密封条。外壳和背板通过定位柱和定位槽进行装配,同时二者利用设置的凹槽相互配合完成橡胶密封圈的固定。此种装配方式连接简单、结构紧凑,减小了传感器整体尺寸,使传感器便于安装在空间狭小的场合。转动组件包括磁钢固定座和隔离板。磁钢固定座嵌入外壳小端圆柱孔,其内部放置霍尔磁钢,用胶水固定;隔离板则与外壳进行装配,靠近磁钢固定座敞口端。电控组件包括霍尔PCB(Printed Circuit Board,印刷电路板)及霍尔磁钢。霍尔磁钢与霍尔PCB上的霍尔芯片采用轴端装配,二者配合工作。磁钢与传感器表面平行旋转,进而产生磁场的角度变化,该磁场角度变化量通过霍尔元器件采集,并经过计算转换为数字量或者模拟量的角度输出信号输出。传感器转动角度与输出电压对应关系唯一确定,可通过线路板直接获取输出电压。
工程机械工作环境通常非常恶劣,粉尘入侵、油污、水汽及盐雾等会对霍尔PCB造成污染和腐蚀。通过隔离板,以一种简单的结构将霍尔PCB与磁钢安装空间分离,两个空间互不连通,同时实现运动部件(包括磁钢固定座和磁钢)与电气元件的隔离。一方面,避免将PCB暴露在空气中受外界环境的影响,进而影响输出电压的准确性,能够给传感器提供初步的保护。另一方面,将磁钢与电气元件隔离,便于生产组装。为了保证密闭性,通过背板上的两个圆孔灌胶,填充了传感器内部多余空间。同时,为了防止胶水渗入隔离板影响转动端旋转,在隔离板与外壳内腔台阶的配合面上采用迷宫密封。迷宫密封的方式为胶水的流动创造了一条复杂的路径,使得胶水很难穿过密封影响到传感器运动部件。这样电气元件和机械组件经密封处理且相互独立运行,对传感器形成二次保护,进一步增强电气元件的密封性,使传感器防尘、防水和耐腐蚀性更强。
磁钢固定座小端部分沿轴向有一侧平面,装配时起定位作用。磁钢固定座与外壳上还对应开设有一段扇形柱,通过改变扇形圆柱圆心角度数的大小可调节传感器转动范围,同时也可实现传感器转动端对传感器主体的机械限位。隔离板对转动端也起到轴向限位的作用,使转动端上安装的磁钢相对于PCB的位置恒定,定位更有保障,减小了实际安装时z方向上的公差对磁场强度的影响。
霍尔PCB置于外壳内部,嵌入对应凹槽中。通过过盈配合固定在外壳上,装配牢固。同时背板上开有一个长度略小于霍尔PCB的凹槽,其与外壳相配合可进一步加固霍尔PCB,实现对霍尔PCB的双重固定。
传感器实物如图2所示。
1.2 磁钢的选用
传感器在实际安装中,在x、y和z方向上总是存在机械公差。在z方向的公差会影响磁场强度,旋转中心的偏移,即x或y方向的变化会导致振幅不匹配、偏移等误差。为了更好地对抗偏心的鲁棒性,传感器上使用大直径的磁钢[10-11]。一个大直径的磁钢会导致一个更大的均匀面积,使在x或y方向上的偏移量相对于磁钢直径可忽略不计,因此可以允许存在更高的机械公差。另外,虽然传感器与磁钢之间的最大距离和磁场强度之间的相关性并不是一个简单的方程式,但仍可用以下方法进行粗略估计[12]:
ΔT=T-T0 (1)
Ddrift=Tc·ΔT (2)
B25℃×(100%-Ddrift)=BT×100% (3)
式中:T为高于常温的温度,℃;T0为常温,取25℃;ΔT为温度差值,℃;Ddrift为磁强度漂移;Tc为传感器所用磁钢的温度系数,取铁氧体标准温度系数,-0.2%/℃;B25℃为本文所设计的传感器常温下所需磁场强度,mT;BT为高温下磁场强度至少需达到的值,mT。
传感器的绝对磁场强度为20~150 mT,高温条件下至少需达到20 mT,即BT=20 mT。
计算得:B25℃=23 mT
磁场强度决定了传感器和磁钢的最大距离,磁钢距离霍尔芯片较远,磁场强度变弱,若周围有其他磁场干扰,传感器容易失效。相反,若磁钢距离霍尔芯片太近,导致芯片饱和,传感器也不能正常工作。据此,结合所设计的传感器结构,本文选用直径8 mm的磁钢,磁钢与霍尔芯片的距离为3.1 mm。
2 传感器性能仿真
采用TDK公司的Microna_Simulator[13]仿真,观察传感器在选定磁钢作用下的非线性输出误差。首先确定仿真所需参数。采集传感器所用磁钢作用下霍尔芯片通道1[14]的磁场强度分量ΦBCH1,如图3所示。
Ooffset=-(ΦBCH1max+ΦBCH1min)/2 (4)
式中:Ooffset为偏移量,mT。
计算得:Ooffset=-1834 mT
其次,選择线性比例范围。本文设计的传感器为模拟量输出,有用的钳位电平必须位于误差带边界内(满量程电压Vsup的7%~93%),故线性比例范围选择为10%~90%,输出范围为0.5~4.5 V(Vsup=5 V)。最后,磁钢温度系数为-0.2%/℃,仿真环境温度为25℃。
传感器的性能仿真结果如图4所示。可以看出,在选定磁钢的作用下,传感器转动角度与输出值呈现较好的线性关系,满足设计要求,且传感器绝对最大线性度误差为0.15 V。下面通过实验验证其真实性能。
3 传感器性能测试及对比
3.1 测试方案
通过联轴器连接传感器与57步进电机,由57步进电机带动传感器旋转,测试台如图5所示。对步进电机进行编码,使其步进角为5°。测试时通过步进电机带动传感器磁钢正转或反转,利用TDK的测量工具Measurementtool[13]读取传感器输出的DAC值,每转过5°读取一次,并将数据保存在excel表中。
测试传感器温漂特性时,加热传感器,使其表面温度稳定在85℃左右。电机每转动5°采集一次数据,并保存成excel表。
3.2 传感器输出优化
从仿真结果看,虽然传感器输出整体呈线性,但与理论输出值仍有较大偏差,因此进一步优化传感器。首先,计算磁系统温度偏移系数和补偿后的磁场强度偏移量[13]。将二者写入芯片内存中可减小线性运动范围末端误差、降低温度漂移对线性误差的影响、减小气隙变化对线性误差的影响以及可在性能相同的情况下允许小尺寸的磁钢。但由于整个温度范围内传感器的磁性系统温度行为未知或非线性,因此保持磁钢在固定位置,在不同温度下(至少三个,其中一个为室温)利用Measurementtool获取补偿后的温度值T和磁场强度数据Φ来创建“温度行为数据文件”,用来计算温度偏移系数,得到的数据如表1所示。
然后,计算磁场强度偏移量[13]。利用TDK的Calibration tool对所设计的传感器进行两点标定[13-14]。芯片可输出的DAC值有效范围为0~32767,本文所设计的传感器输出范围为满量程的10%~90%,可转动的角度范围为0°~120°。标定结束后,由步进电机带动角度传感器转动。利用Measurement tool每5°采集一次DAC值和CH1_COMP(Compensation,补偿)值[14],进行第一次0°~120°范围内的角度测量。其中,采集到的CH1_COMP值如图6所示。
将图6数据代入式(4),计算得偏移量为-0.305 mT。
其次,将“温度行为数据文件”和偏移量值写入信号路径中,系统将自动计算并更新偏移系数,结果如图7所示。将更新后的偏移系数写入芯片内存中。
最后,利用TDK公司的Linearization tool对所采集的DAC值进行线性化处理[13],对采集到的传感器的每一输出值进行校准修正。完成信号修正后,进行第二次角度测量。线性化前后的测量数据如图8(a)所示。结果表明,线性化处理后传感器输出更接近理论输出(由Linearization tool根据导入的excel文件数据自动拟合出的线性值),与理论值的最大偏差由0.07 V减小为0.06 V,如图8(b)所示。小于仿真时得到的非线性误差0.15 V(25℃),性能提高,达到修正目的。
3.3 GD-868ZE120与424ZE120性能对比
ELOBAU的424ZE120角度传感器广泛应用于工业机械角度测量。测量得到424ZE120、GD-868ZE120传感器的线性度、温漂等特性参数,进行对比分析,并验证密封性。此外还测量传感器的重复性和迟滞性能,做进一步对比,判断所设计的传感器性能优劣。
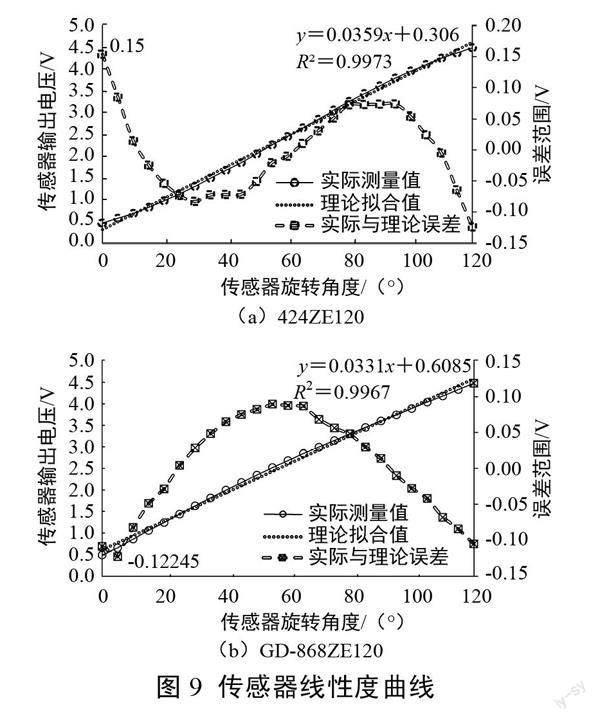
(1)线性度性能比较
将传感器按照测试方案中的方式连接,采集424ZE120、GD-868ZE120传感器输出数据如图9所示。可以看出,424ZE120传感器输出电压最大非线性绝对误差为0.15 V,根据线性度定义[15]计算得该传感器线性度为3.75%;GD-868ZE120传感器输出电压最大非线性绝对误差为0.12245 V,计算得线性度为3.06%,小于424ZE120的线性度。故GD-868ZE120传感器线性度优于424ZE120传感器。
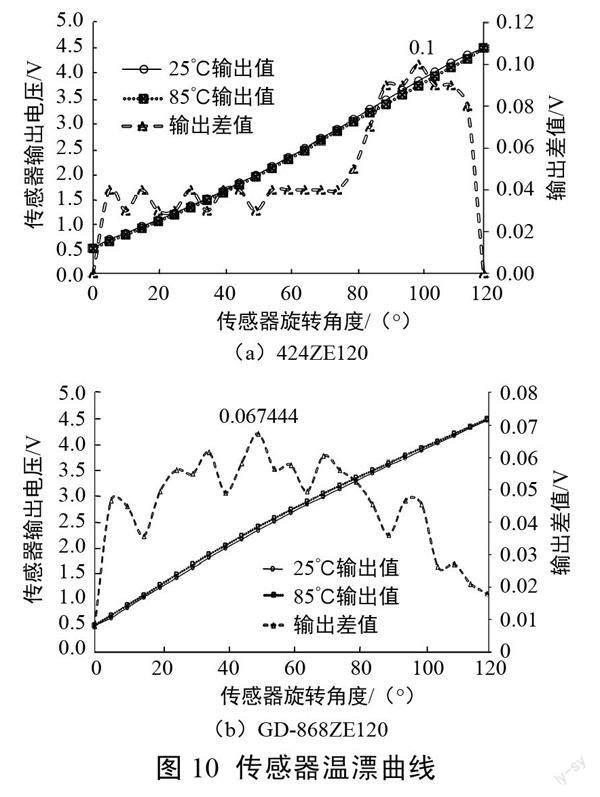
(2)温漂特性比较
在25℃和85℃时,分别记录424ZE120、GD-868ZE120传感器输出数据,得到图10。可以看出,424ZE120传感器输出最大输出差值为0.1 V,根据温漂定义[15]算得温漂为0.167 V/℃;GD-868ZE120传感器最大输出差值0.067444 V,温漂0.1124% V/℃,小于424ZE120传感器的温漂,可以判断出温度变化对GD-868ZE120传感器的影响更小。
(3)GD-868ZE120传感器IP68性能测试
首先通过传感器背板上的两个圆孔灌胶,然后将传感器置于水下1 m,保持72 h。其次,将传感器置于2 L壓力桶中,用空压机向压力桶加压,直至压力桶压力表读数为0.2 MPa,保持30 min。实验设备如图11所示。最后测量传感器输出,得到相应变化曲线,如图12所示。
由图12可知,GD-868ZE120传感器在测试后正、反行程最大非线性误差绝对值分别为0.126 V、0.117 V,小于424ZE120传感器最大非线性误差0.15 V。综上,GD-868ZE120传感器在经IP68测试后仍具有良好的工作性能,密封性良好,满足IP68性能指标,优于424ZE120。
(4)重复度性能比较
测得424ZE120、GD-868ZE120传感器的重复度曲线如图13所示。可以看出,424ZE120传感器正程输出最大不重复误差为0.06 V,反程输出最大不重复误差为0.07 V,根据重复度定义[15]计算得该传感器正、反行程的重复度分别为1.5%、1.75%;GD-868ZE120传感器正程最大不重复误差为0.014 V,小于424ZE120传感器正程最大不重复误差,反行程最大不重复误差0.0116 V,小于424ZE120传感器反程最大不重复误差。且GD-868ZE120传感器正程重复度0.35%、反程重复度0.29%,分别对应小于424ZE120传感器的重复度。经过对比,本文设计的GD-868ZE120传感器的重复度更佳。
(5)迟滞特性比较
测试得到424ZE120、GD-868ZE120传感器的迟滞特性曲线如图14所示。
可以看出,424ZE120传感器正、反行程间的最大输出差值为0.08 V,故根据迟滞定义[15]计算得该传感器迟滞为2%;GD-868ZE120传感器最大输出差值为0.015 V,计算得迟滞为0.375%,小于424ZE120传感器的迟滞。经过对比,本文所设计的GD-868ZE120传感器比424ZE120传感器迟滞小,符合预想设计要求。
4 结论
本文完成了GD-868ZE120角度传感器的结构创新设计,以简单的结构实现了传感器角度测量范围的灵活设置、转动端对传感器主体的位置限定、磁钢与霍尔PCB的空间隔离、良好的密封性以及霍尔PCB的双重固定。选择了合适的磁钢,通过仿真得到了很好的线性输出。并计算传感器实际的磁系统温度漂移系数和磁场强度偏移量对传感器进行补偿以及对传感器输出值进行线性化处理,进一步优化了传感器输出性能。经过测试,线性化处理后传感器输出值与理论值的偏差进一步减小,非线性误差小于仿真时得到的误差值,验证了上述方法的合理性。通过实验采集GD-868ZE120角度传感器与ELOBAU的424ZE120传感器输出值,对比各项性能指标。
结果表明,与ELOBAU的424ZE120传感器相比,GD-868ZE120传感器具有更好的线性度、温漂、防水防尘性能、重复度以及迟滞,满足设计要求。
参考文献:
[1]邹梅,王培元,张华. 基于3D霍尔传感的摇杆手柄系统设计[J]. 科学技术创新,2019(35):40-42.
[2]王新峰,许彬彬,戴立业,等. 一种基于径向充磁的霍尔式新型角度传感器[J]. 厦门大学学报(自然科学版),2016,55(1):126-130.
[3]印友军. 基于霍尔原理的非接触式位置传感器的研究与应用[D]. 上海:上海交通大学,2012:4-5.
[4]赵建飞. 基于霍尔效应的刹车踏板角度传感器设计与标定[D]. 苏州:苏州大学,2018:3-8.
[5]刘晟睿. 一种防水的霍尔电位器:CN211855371U[P]. 2020-11-03.
[6]王佳明,曹科伟,潘骥. 霍尔电位器:CN209495710U[P]. 2019-10-15.
[7]宋业建. 一种霍尔电位器:CN212458409U[P]. 2021-02-02.
[8]陈杰,刘国营,张西平,等. 温度对霍尔位移传感器静态特性的影响[J]. 大学物理,2012,31(6):34-36.
[9]刘耐特,赵伟. 车用线性霍尔传感器的温度补偿方法研究[J]. 科技与创新,2020(15):34-36.
[10]刘刚,肖烨然,宋欣达. 永磁同步电机用线性霍爾位置检测的误差补偿[J]. 电机与控制学报,2014,18(8):36-42,54.
[11]郑伟峰. 新型角度检测装置及其检测方法研究[J]. 传感器与微系统,2021,40(5):15-17.
[12]TDK. HAL 3625 Error Compensation Guide[M]. Tokyo:TDK,2010.
[13]TDK. HAL 37xy Training Presentation[M]. Tokyo:TDK,2015.
[14]刘闯,韩嘉骅,张宁宁,等. 操纵杆角位移测量装置的设计[J]. 机械,2021,48(1):67-74.
[15]胡向东,李锐,徐洋,等. 传感器与检测技术[M]. 北京:机械工业出版社,2018.
