人体静电电位信号数据对齐方法研究
2023-08-11张永强于洪昌周万珍满梦华
张永强 于洪昌 周万珍 满梦华
关键词:数据处理;人体静电;电位信号;数据对齐;起始点检测;特征提取
中图分类号:TP399 文献标识码:A DOI: 10.7535/hbgykj.2023yx01006
随着物联网技术的进步以及测量技术的不断发展,试验过程中往往需要同时测量多种物理量,例如温度、电压、定位和速度等。不同物理量数据对齐,往往要求数据中含有时间戳,将读取时间戳相同的传感数据进行匹配,完成对齐[1]。然而,不同物理量的采集系统往往是独立的,无法保证时间戳的精确同步。采用时间对齐方法处理数据将无法精确对齐,从而影响测试结果的准确性,不能满足相关试验所需的数据精度。
传感器设备采集数据的相关试验中,不同设备采集的数据之间起始点和终止点的对齐往往是试验中的重要部分之一。对此,相关学者在不同领域的试验研究中也提出了自己的解决方案。例如:羅思洋等[2]、黄镇坤等[3]、董胡等[4]均利用双门限算法实现了语音识别系统的端点检测,该方法依据语音信号的语音段和噪声段的特征差异,通过比较短时能量和短时过零率大小区分噪声段和清音段[5]。陈昊泽等[6]提出了将语音信号的能量与频带方差的乘积值作为参数进行双门限端点检测的方法。音符起始点检测常见的方法为峰值提取算法,通过提取峰值,阈值设定,判断突变点的变化趋势,得到音符起始点向量。其中,桂文明等[7-8]利用改进的峰值提取算法生成音符起始点向量,提升了音符起始点算法的性能。林静等[9]通过计算谱能量差分函数的峰值点与设置能量门限的大小确定音符信号的起始点。胡新荣等[10]利用标准差归一化的方法实现了人体三维骨骼数据信息的数据对齐。刘秀锋等[11]通过利用弹体在飞行时的数据相关性,求出差的平方和的最小值,实现了实时采集数据对齐。以上方法只在特定单个传感器系统数据的对齐中得到了部分应用,局限性较大。现有相关试验文章大多数缺乏对数据对齐的探讨,忽视了数据对齐的重要性。同时,少有学者对多传感器测量系统中不同类型物理量数据的数据对齐方法进行深入研究。因此,本文探索多传感器数据对齐方法,解决多设备数据采集时间同步问题,实现设备激活时间和数据的精确匹配。多传感器测量系统往往把接触式和非接触式两种测量方法组合在一起,要对齐的数据并不存在对应点,其密度和精度也均不同[12],这就使很多数据对齐方法无法应用到多种类型数据中。以本课题组进行的人体静电电位信号的无线采集试验为例[13],本文对四路非接触式静电电位传感器、UWB 定位传感器和两路加速度传感器3种不同类型传感器采集的数据进行处理和对齐研究,讨论不同类型物理量数据进行对齐操作方法上的异同点。通过波形分析和特征提取等工具提出了数据起始点和终止点对齐方法。根据数据变化特性,求出数据突变点,从而确定数据变化的起始点和终止点,实现数据对齐。
1 数据的采集和分析
人体静电电位信号的无线采集试验采用远距离非接触式探测方法。人在行走过程中是带电的,人体的脚和地板之间有2个高电阻层,分别是受试者的鞋底Cs和地板的表面Cf[14]。人体对大地的整体等效电容CB由双脚和地板之间的耦合电容Csf和人体相对于地板上附近物体的电容Cri 的电容组成。假设QB为人体电荷量,则流过测量电极的感应电流I 可表示为
试验在室内环境下,选取跳跃、行走、跑动3个典型日常动作,以识别不同待测人员在不同运动姿态下人体静电电位信号的差异。人体与静电传感器的距离会随着人体的移动发生变化,感应电极产生的感应电流强度也会受到影响。人体运动速度的变化也将时刻影响着人体静电电位的变化。为了得到更加准确的人体静电电位信号,数据采集完成后,需要根据人体到静电传感器的距离数据和加速度数据对静电传感器检测的信号进行补偿计算。试验场景如图1所示,采用四路非接触式静电电位传感器、UWB定位传感器和两路加速度传感器分别对人体静电电位信号、人体运动距离和人体运动加速度进行检测。
将采集到的人体静电电位信号以样本容量为横轴、电压值为纵轴,根据不同运动状态分别绘制波形图,如图2 a)—c)所示。试验过程中人体运动状态为静止—运动—静止,因此,图中开始段和结束段检测的静电电位信号值变化趋于平缓,而随着试验人体运动状态的改变,人体静电电位信号的波形也出现明显的差异和波形特性。
UWB定位传感器采用调制脉冲信号实现了厘米级的测距精度[15-16]。通过ToF(time of flight)飞行时间测距法[17]测得定位标签(A0)到定位基站(T0,T1,T2)间的距离(d0,d1,d2)。利用三边测量法[18-19]确定标签传感器的坐标,即被测人体坐标(x,y)。然后,通过计算人体坐标(x,y)和4路静电传感器(A,B,C,D)的坐标(Xi,Yi)的距离得到试验所需要的数据,把问题转化为求解交点和两点之间距离问题。以步行为例,如图3所示,利用MATLAB函数,以样本容量为横轴,采集并计算后的距离数据为纵轴进行绘图操作,得到人体运动过程中与四路静电传感器(A,B,C,D)之间距离数值的变化曲线。
当人体运动时,加速度模块主要实现三维平面上人体运动加速度数据的检测,通过人体加速度在人体坐标系中进行各轴向的分解来获取,即沿着X ,Y,Z 3个轴向的人体加速度数据进行采集[20]。以步行为例,如图4所示,利用MATLAB函数,以样本容量为横轴,采集的加速度数据为纵轴进行绘图操作,得到的人体运动过程中加速度在3个方向的数值变化曲线。
非接触式静电电位传感器模块、UWB 定位传感器模块和加速度传感器模块是3个分别独立的系统。由于3个系统均没有授时系统,不能对数据采样点进行统一的时间标记,时间标签无法做到毫秒量级的精确对时。因此,数据采集的同时,得到的不同物理量数据存在相位上的误差,即不同信号和数据的起始点和终止点存在差异。需要进一步把不同设备采集的数据对齐到同一个基准时刻,从而获得同一时刻的静电电位值、距离值和加速度值。此外,根据图2、图3和图4可以看出,不同类型传感器采集的数据随着人体运动产生的数据变化存在很大的差异。其在波形特性、变化趋势、起始点特征以及周期性等方面均有不同。为了准确计算出运动时不同数据的起始点和终止点,本文在进行数据对齐操作时,针对不同类型的数据采用了不同的计算过程和对齐方法。运动人体静电电位信号数据对齐业务示意图如图5所示。
2 试验数据的对齐
在试验过程中,数据对齐操作最主要是起始点和终止点的检测。为了准确提取人体运动数据的起始点和终止点,试验采集过程中被测人体从保持静止一段时间到开始运动,再到静止。在数据的开头和结尾会出现一段相对平稳的数据段,方便对运动状态的数据起始点和终止点进行检测。
2.1 人体静电电位信号模块的对齐
人体静电电位信号数据的对齐操作主要包括:数据清洗、起始点与终止点的提取操作。根据试验要求,利用了MATLAB函数工具针对人体静电电位信号数据进行数据对齐。
2.1.1 数据清洗操作
对采集到静电电位信号的数据清洗工作,主要是为了消除由于试验场地周围带电物体、采集设备自身系统限制、环境噪声和被测人体残留静电等噪声对提取人体运动信号起始点与终止点正确性的影响。数据清洗操作主要包括降噪滤波、降采样和去偏移3部分。
1)降噪滤波 试验中降噪滤波采用MATLAB数字滤波器[21]对原始静电数据进行降噪处理,可排除一些无用信号和噪声干扰。
2)降采样 降采样过程降低数据量大小,并将数据集重新采样为固定频率。
3)去偏移 该过程主要分为两步。首先由于静电传感器在设备启动和关闭过程中存在系统抖动和噪声因素的影响,需要在信号的起始位置和终止位置去掉振铃,即去掉n 个点,本试验中令n=10。其次,由于人体残留静电电位影响,静止时静电信号电压值不等于0,因此,需要通过取前m (m =100)个点的均值作为偏置量,即人体在运动前静止站立1 s内的人体静电电位均值。将重采样后的数据减去偏置量,从而使得静电信号在静止时电压值靠近0,同时保证静电信号电压值波动范围在电压值正值或负值的同一侧。
2.1.2 起始点与终止点的提取
试验中人体的运动过程是:静止—运动—静止。因此采集的人体静电定位信号数据由静止状态切换到运动状态的时刻为数据变化点,此点即为数据对齐的起始点。静电信号数据由运动状态切换到静止状态的时刻为数据不变点,此点即为数据对齐的终止点。静电信号数据的对齐操作,鉴于原始数据中静电信号数据是随着动作不断变化,试验首先采用静电信号相邻数据点之间的一阶差分形式来度量数据变化。通过计算连续10个数据点的方差确定第一个突变点和最后一个突变点,即为数据对齐的起始点和终止点。以步行为例:一阶差分如式(4)所示。
步行状态下,A 路静电信号经过一阶差分计算得到的相邻数据点差值的变化趋势如图6所示。可以看出,随着人体运动状态的改变,相邻数据点差值大小发生了明显的变化。
首先,对人体静电电位信号的一阶差分变化值分别进行连续10个数据点的方差计算。通过计算方差的变化进行查找,分别得到静电电位信号的第一个突变点和最后一个突变点。然后,将第一个突变点索引的最小值作为静电信号的起始点时刻,将最后一个突变点索引的最大值作为静电信号的終止点时刻,即为数据对齐的起始点和终止点。
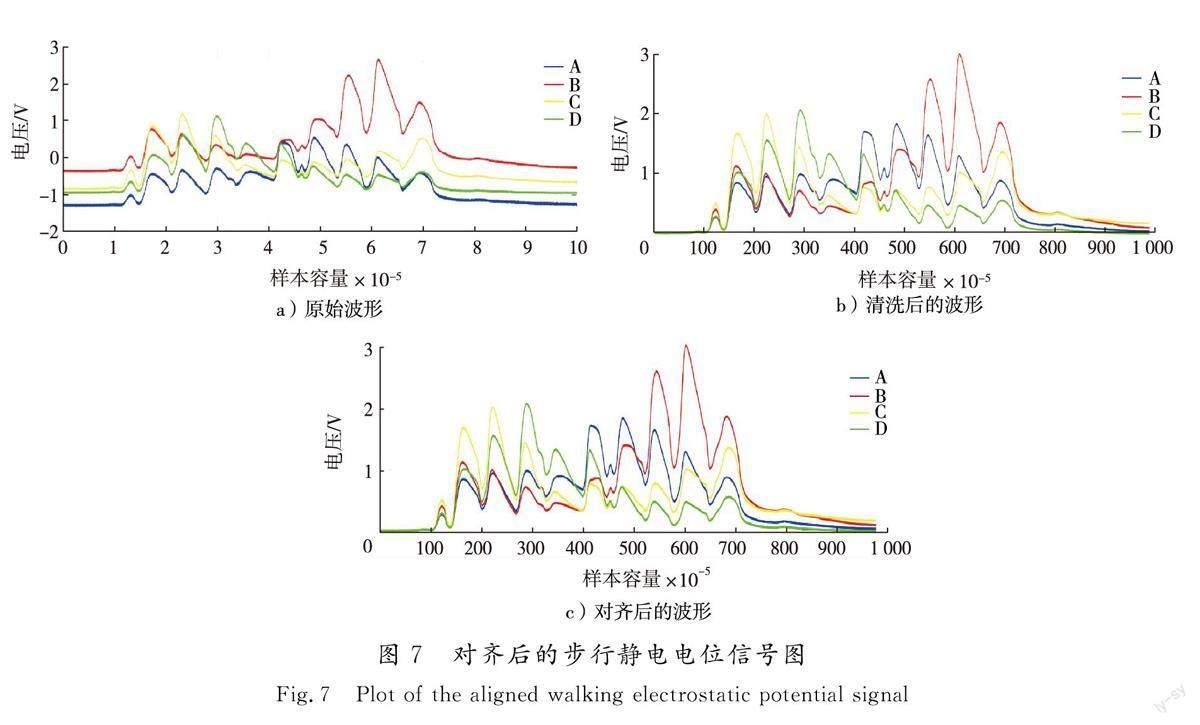
以步行为例,经过数据清洗以及起始点和终止点提取操作后,人体静电电位信号的波形如图7所示。
将图7 a)与图7 b)对比可知,数据清洗操作在保留有效波形信息的基础上有效去除了未处理前信号波形上的高频噪声。图7 c)在数据清洗基础上实现了起始点和终止点的提取,并从各自数据清洗后的波形中删除起始点时刻之前和终止点时刻之后的数据样本,完成静电信号数据的对齐工作。
2.2 UWB定位模块数据的对齐
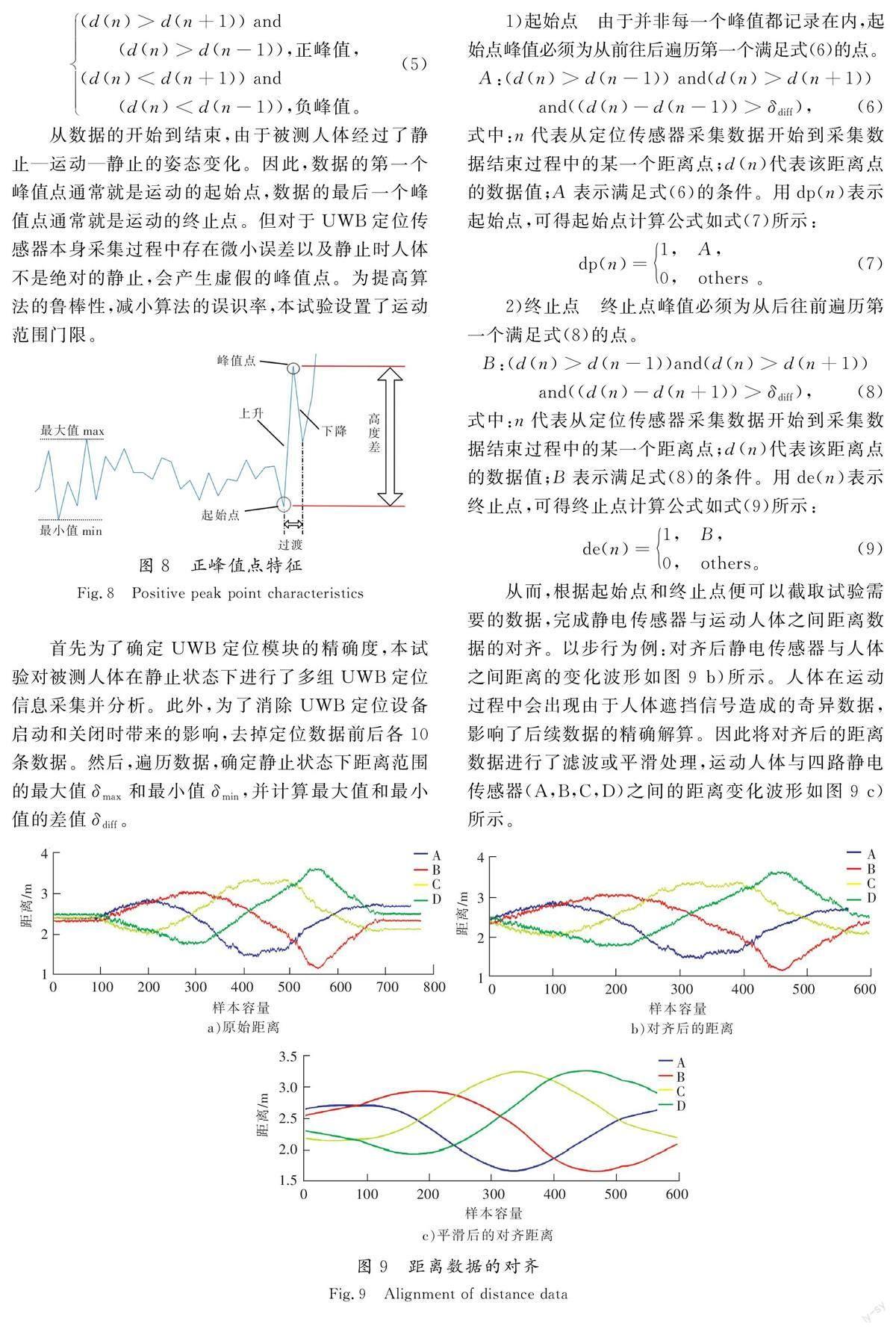
根据UWB 传感器数据起始点和终止点的特征,一般伴随峰值点d (n)与相邻点d (n -1)和d(n+1)幅值之差的绝对值突然增大的现象,如图8所示。如果第一个出现的峰值点满足与相邻数据点高度差超过静止时高度差范围,则该峰值点为起始点,如式(5)所示:
以A 路静电传感器信号变化、A 路静电传感器到人体距离、x 轴加速度为例:数据对齐后的结果对比如图12所示。
通过对图12所示的数据对齐结果进行分析,可以看出,上述方法得到的对齐后的数据相比于原始数据在多个方面进行了优化。
1)根据3组不同传感器特性对采集的原始数据进行了特征分析,针对对齐所采用的具体方法进行了调整。其中,运动门限范围选取是重要的,针对不同传感器采集的数据,运动范围门限选取有所不同。过大的门限会在杂波较多时放入过多突变点,过小的门限会使得正确的突变点被卡在门限外面。
2)通过计算人体运动数据的突变点,明确了有效数据的起始点和终止点,清除了数据端点不同带来的偏差。
3)对齐过程对不同传感器的采样频率也进行了调整,尽可能实现对齐操作得到的结果数据样本容量的统一。
4)对数据进行了清洗,有效地消除了环境噪声对静电信号和采集数据真实性的影响,为试验后续人体动作和人员的识别提供了更加真实可靠的数据支持。
3 结语
在数据对齐方法的基础上,本课题组在文献[13]中根据对齐处理后的人体静电电位信号和人体运动距离数据进行了静电电位补偿运算,从而获得了更加精确的人体静电电位信号值。本课题组还将继续优化静电电位补偿算法,通过数据拟合后的人体静电电位信号进行人体动作、人员的识别试验。
本研究以人体静电电位信号数据采集试验为例,针对运动人体的静电电位信号、定位数据和运动加速度数据,进行了数据分析、滤波清洗和特征点提取等操作,设计实现了多传感器数据的精确对齐。为基于人体静电信号获取人体姿态信息提供了有效的数据支撑,同时为多传感器相关试验系统中数据对齐的方法提供了范例。相比于根据数据采集时间进行对齐的方法,本文采用的方法可以有效提高多传感器集成系统的对齐精度。然而,本文设计的方法主要针对数据起始点和终止点的提取,实现不同类型数据的对齐还有一定差距,且数据对齐过程繁琐。未来,课题组将继续优化数据对齐并探索新的研究方法。
