无人机远程控制在油气田行业的研究与应用
2023-08-10刘欣欣汪洋黄丽黄俊豪何乐
刘欣欣?汪洋?黄丽?黄俊豪?何乐
摘要:本论文主要研究无人机在管道巡检中的应用,特别是自主飞行技术和无线通信模式下的远程控制技术。该研究旨在探索一种新的無人机自主巡检管道的管理模式,以降低部分区域管道人工巡检频率,提高巡检的安全性及高效性,从而提高油气田智能化管理水平,并降低含硫气尤其是高含硫气管道巡检风险。
关键词:管道巡检;无人机自主飞行;远程控制;汽油田智能化管理
一、现状分析
气矿前期已经对于“无人机+”应用模式开展了方式探索与经验积累,目前采用的方式是飞手在现场执行飞行任务,同时视频存储,对部分管道进行应用实践。针对生产现场提出的新要求需要利用无人机巡检来实现实时视频监测等功能,解决原应用模式存在操控不够灵活、无法实时通信的问题。
二、解决方案
研究一套无人机远程控制架构,利用远程灵活控制和实时视频回传等功能,将其组成无人机远控系统,实现“远控无人机+”应用模式。该模式在无线通信覆盖区域内,减少人工巡检频次,保障天然气管道安全平稳运行。
三、主要研究内容
(一)确定研究方案
1.无人机远程控制及通信组网模式研究
开展调控中心、片区两级随时触发或介入无人机自主飞行模式,实时调看飞行任务过程中拍摄高清视频等远程控制功能的研究;比较选则5G、4G、微波等多种移动通信方式,制定适用于移动信号薄弱甚至盲区的生产现场的通信组网方案。
2.无人机自主开展片区巡检应用研究
根据输气管道巡线的业务需求,包括管道周边环境变化、第三方施工隐患识别、场站环境、甲烷泄漏监测等,开展对飞行参数设置、搭载设备选型及数据分析平台功能开发的研究。在片区范围内,实现管道无人机一体化自主巡检。
(二)确立通信组网模式
采用两种组网模式,可实现无缝切换:
4G/5G链路建设:无人机搭载4G/5G通信模块,利用运营商网络接入云服务器来实现通信。
微波链路模式:无人机搭载微波通讯模块,利用微波基站与停机坪进行通讯,停机坪充当通讯中继,实现通信链接。
这两种模式可以相互切换,使得无人机的通信更加稳定可靠,提高无人机巡检的效率及精度。
(三)确立无人机自主飞行软硬件配置方案
1.硬件选型和适配
(1)无人机
①选用多旋翼无人机:以实现低空、精细化巡检作业。
②配备2种通信模块:4G和微波通讯模块。
③挂载配置:可配置挂载重量3kg,目前配置高倍变焦摄像头。
(2)机库
①作为供电源:为无人机充电,为气象站供电。
②作为通信枢纽:微波链路中转站,为气象站提供网络。
③作为保护屏障:具备RTK+视觉引导技术,确保无人机精准降落;装配烟感、温度传感器、水淹传感器和断路器,一旦检测到异常情况,将采用断电处理。温湿度超标,会自动启动空调降温。
(3)气象站
飞行条件判断:通过地方气象台的数据与内设环境监测传感器数据联合监测风速、风向、雨淋、温度、湿度和光照。
(4)工作环境检查标准:
①工作风速:0m/s-12m/s(0-6级)。
②工作温度:-20℃-60℃。
③工作湿度:10%-90%(无凝结)。
④电磁干扰:0-100A/m(工频磁场)。
超出标准的范围,无人机将无法起飞或需要临时迫降。
2.软件功能设计
机组精细管理、预设飞行轨迹和制定飞行任务是实现无人机自主飞行的三个模块。
(四)确立无人机远程控制模式
采用两种控制模式,可实现无缝切换。
常规巡检模式:可远程控制无人机的飞行,下达巡检任务、一键起降、实时视频回传等功能。
应急接管模式:遇到紧急情况需要飞手直接介入,可通过手动摇杆对无人机进行实时接管。
四、现场应用成果
(一)在黄龙X井试验成功
1.关键硬件选址
(1)无人机机库及气象站选址关键要素
①开阔地带,周围不能有大的信号干扰源影响GPS定位。②地面相对平整,位置相对高,水泥地基面积大于20平方米,气象站距离停机坪5米。③具备220V电力接入条件。④具备网络接入条件,上行带宽50M,下行带宽500M。
(2)微波中继站选址
①以机库位置为圆心,方圆5公里区域内制高点;如非区域最高点,能与机库通视两者海拔高差不超过30米。②无电磁干扰,避免影响通信信号。③附近具备220V电力接入条件。
2.部署方案
硬件部署方案:机库及中继站部署在黄龙X井,中继站部署于场站周围制高点,海拔约712米,供电源取自村委会,租赁运营商500M链路1条。
软件部署方案:软件平台搭建于黄龙X井中心站及调控中心。
3.试验效果
通过建设无人机机库、气象站、微波中继站、远控平台等软硬件,实现预设飞行、精准降落、自动充电等功能的上线,能够自主实施半径5公里范围内的飞行任务。在中心井站和一百多公里外的调控中心,都能对巡航在井站、管道的无人机实时发布启停指令并操控飞行。
(二)常规管道巡检参数设置
飞行场景:地势平缓区域管道、山地上坡区域管道、山地下坡区域。
巡检关键要素:管道桩、管道标志牌、堡坎。
飞行参数:
①飞行速度。无人机飞行速度范围为0-20米/秒,电池容量可供飞行时长为20分钟。为应对天气突变等应急情况,在无人机返程时需要保留50%电量,实际巡检飞行时长为10分钟。无人机的飞行速度越慢,呈现的视频效果越佳。以黄金X段为例,巡检管线长度为4.43km,无人机从起飞点至巡检起始点直线距离约1.3公里,总的飞行里程为5.73公里。飞行航线的航点数为31个,平均每个航点处从刹车到转弯后再次启动的耗时为4秒,飞机总的航行耗时约为2分钟。实际巡检为8分钟,故黄金X段的飞行速度为5730米/480秒,约为11.94米/秒。
②飞行高度。无人机的相对飞行高度范围为0-300米,其中300米以上属于民航使用空域,且在山区,气流紊乱增大,不可控。机库所在地黄龙X井的海拔高度约682米,以黄龙X井支线为例,巡检范围内的制高点海拔约767米,因此飞行高度至少要高于两者高差85米。由于无人机在飞行时会因卫星颗数减少以及风速对飞机气压计的影响,导致飞行高度出现上下浮动的偏差。为确保飞行高度的绝对安全,飞机与制高点之间的相对高度应高于15米以上,以防在飞机定位误差增大时,高度低于制高点的高度发生碰撞。综合以上两种因素,以及无人机自动调节飞行高度等技术原因,最低安全高度被设定为100米。同时,无人机飞行的高度越低,呈现的视频效果越佳,画质损失越小,地面物体看得越清晰。因此,飞行高度控制在100米时视频效果最佳。
③变焦倍数与管道两侧可视距离。以五黄线X区域管道为例:飞行高度100米的情况下,变焦倍数为1倍,管道两侧的可视距离为左右各60米;飞行高度100米的情况下,变焦倍数为2倍,管道两侧的可视距离为左右各40米;飞行高度100米的情况下,变焦倍数为4倍,管道两侧的可视距离为左右各20米;飞行高度100米的情况下,变焦倍数为6倍,管道两侧的可视距离为左右各10米。为及时发现管道两侧的地质灾害、施工、爆破等行为,避免管道出现不完整性,管道两侧的可视距离应保证在左右各50米。在飞行速度和高度不变的情况下,变焦倍数越大,物体离相机的距离就会看起来更近,画面的相对运动越明显,运动模糊程度越大,画面的辨识度越低。因此,在选择拍摄变焦倍数时,应优先选择小的倍数,这样更容易辨识拍摄画面中的物体。 综上,在巡检五黄线时,非应急情况下,在飞行相对高度100米的情况下,变焦倍数保持在1倍时效果最佳。
④拍摄角度。应用场景分为地势平缓区域管道、山地上坡区域管道、山地下坡区域管道,拍摄镜头角度为30度、45度、60度、90度,并逐一进行试验,得出以下结论。
a.针对地势平缓区域管道(以黄金X段X村区域管道为例)
在地势平缓区域,拍摄角度90度的二维平面效果明显,管道左右两侧等距,左右视野清晰,不存在视觉盲区,但不容易分辨出标志牌及管桩的位置。60度、45度、30度的拍摄角度三维立体感明显,更容易分辨出标志牌及管桩的位置,但管道视野呈倒置梯形结构(视野呈上宽下窄),近处管道清晰,远处较模糊,对比无人机飞行位置,巡检画面整体前置,角度越小画面前置位置越大,距离拍摄物越远,画面越广,拍摄要素越模糊;若在管道正上方巡检,由于画面前置问题,在管道拐弯时容易出现视角盲区(即管道不在巡检画面中)。综上,在管道日常巡检时,地势平缓区域,优先采用90度巡检。
b.针对山地上坡区域管道(以黄龙X井集气支线X区域管道为例)
在山地上坡区域,拍摄角度90度的二维平面效果明显,管道左右两侧等距,左右视野清晰,不存在视觉盲区。60度、45度、30度的拍攝角度三维立体感明显,对比无人机飞行位置,巡检画面整体前置,角度越小画面前置位置越大,距离拍摄物越远,画面越广,拍摄要素越模糊;如需拍摄到管道,无人机位置需向后调整(无人机位置不能在管道正上方);若在管道正上方巡检,由于画面前置问题,易出现视角盲区(即管道不在巡检画面中)。综上,日常的管道巡检时,山地上坡区域,优先采用90度巡检。
c.针对山地下坡区域管道
山地下坡区域只能实现90度的管道影像摄取,30度、45度、60度均无法实现管道影像的有效摄取(存在视觉盲区,即管道无法呈现在巡检画面中)。综上,日常的管道巡检时,山地下坡区域,优先采用90度巡检。
综合以上不同环境的测试结果,发现在90度角度下拍摄,盲区最少,适用的场景最多。同时,在后期将三色管叠加到视频上时,若飞行角度为90度,相机画面中心点的坐标就是飞机坐标点,可以将画面中心点的坐标与管线路径坐标做比对,从而将管线走向叠加到相应画面上。但如果采用其他角度拍摄,由于画面中心点位置相对飞机位置有前后的位移,且画面视角范围上下不均等(视野呈倒置梯形结构,视野上宽下窄),导致无法得出画面中心点的坐标,进而无法与管线路径坐标做对比,最终无法实现管线的三色标注。综上,在日常管线巡检中,优先采用90度巡检视频效果最佳。
(三)应急情况下勘查参数设置
①飞行速度。由于应急勘察一般是对单独的要素情况进行拍摄,不用按照固定航线飞行,因此可以根据实际应急情况的需要,飞行速度控制在0-20米/秒。
②飞行高度。满足安全要求,在飞行途中,高度控制在100米以上(含100米)。到达目的位置后可根据实际环境降低飞行高度,但至少要大于飞机与机库之间制高点15米的高度。
③变焦倍数。以黄金X段的标志物为例,设置变焦倍率为5倍、10倍、20倍、40倍,并逐一进行试验,得出以下结论:综合对比40倍时的图片最清晰。根据实际应急情况的需求,变焦控制在1-40倍之间,变焦倍率越高,拍摄越清晰。
④角度。以黄金X段的标志物为例,设置拍摄镜头角度为30度、45度、60度、90度,并逐一进行试验,得出以下结论:90度缺乏立体感,画面较为平面。30度、45度、60度画面有立体感,能更好地判断出拍摄要素外貌,45度的画面立体感最强,距离拍摄要素的距离也相对较近。综上,应急巡检时,优先采用45度巡检。
综上,应急勘察过程中,应该根据实际情况控制巡检速度控制在0-20米/秒之间;飞行途中,必须将巡检相对高度控制在100米以上(含100米),并根据现场实际环境情况适当降低飞行高度;至少要高于飞机与机库之间制高点15米。变焦范围应为1-40倍;选择拍摄角度时,应优先选择45度。这些措施的实施,将有助于获得更清晰、可靠和具有实际应用价值的勘察数据,提高勘察的工作效率和准确性。
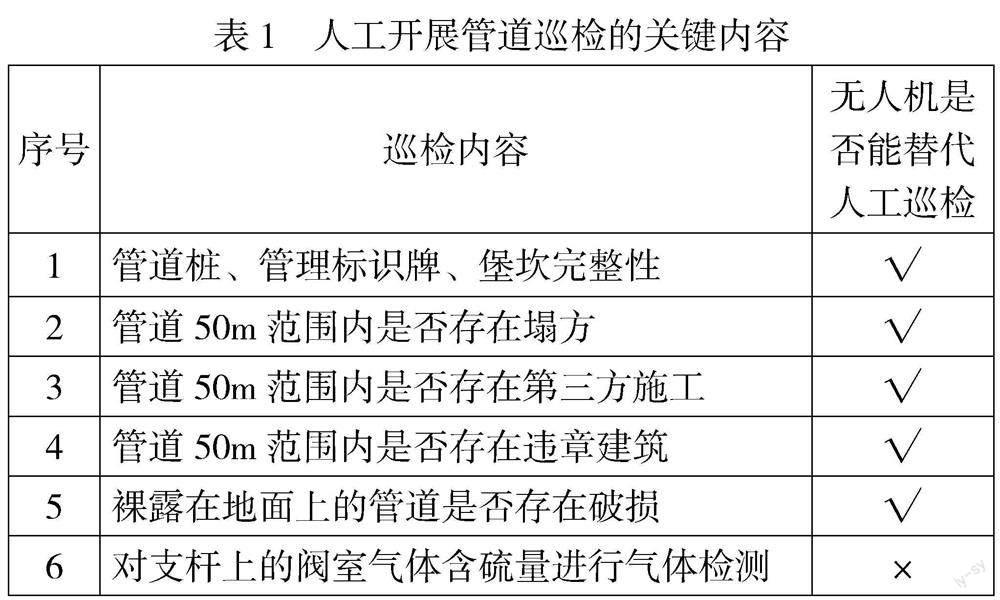
(四)与人工巡检相比的替代率
经测算,无人机巡检与人工巡检相比,可替代率为83.33%。
五、结束语
无人机远程控制在油气田行业的研究与应用,主要实现以下成果:①突破实时通信瓶颈。通过移动通信和无线微波通信模块适配测试18次,选用4G/5G链路与无线微波连接无缝切换的方式,解决山区信号较差的问题,确保无线信号覆盖半径可达10-30公里。②攻破远控技术壁垒。进行无人机、通信基站、气象探测器等硬件设施选型和适配,并开发和调测与实时视频回传、预设飞行轨迹、机组精细管理等软件功能,融合形成一套完整的无人机远程控制架构,实现片区和调控中心的两级控制。③打破多元应用边界。通过红外高倍变焦摄像头等无人机挂载调测,适配日常巡检、应急处置等应用场景,使任务执行范围可覆盖片区内管道,实现多元应用。这些成果的实现,将为油气田行业提供高效、精准、智能的巡检和应急处理服务,提高生产效率和安全性。
作者单位:刘欣欣 汪洋 黄丽 黄俊豪 何乐
西南油气田公司川东北气矿
参 考 文 献
[1]于同阳,尹丽菊,胡浩东,等.基于移动网络的多轴无人机远程控制系统[J].自动化与仪表.2019(08).
[2]熊勇良,王庭喜,熊四华,等.5G无人机与远程控制系统应用分析[J].工程技术研究.2020(23).
[3]高宏,于萍.无人机在应急通信中的应用前景[J].劳动保护.2022(04)
[4]付振江,罗俊松,宁进,等.无人机集群通信的应用现状及展望[J].无线电工程.
[5]李培铭,周睿. 无人机通信专网在频谱共享下的接入与干扰管理[J].现代信息科技.2021(18).
