小型电动覆膜机设计与试验
2023-08-08符德龙王震吴雪君张富贵吴雪梅黄兰
符德龙 王震 吴雪君 张富贵 吴雪梅 黄兰


摘要:贵州烟区烟草种植多采用人工方式覆膜,作业成本高、劳动强度大、机械化水平低。为解决这一问题,根据贵州烟草种植农机农艺融合要求,研制了一款小型电动覆膜机,并简述了覆膜机的结构和工作原理。覆膜机采用主动培土方式实现覆土,分析了培土刀刀轴轴线与水平面夹角对覆膜质量的影响;通过EDEM软件对培土刀的入土过程进行仿真分析,确定了培土机构的结构和工作参数。田间试验结果表明,当覆膜机培土刀刀轴轴线与水平面夹角为5°时,覆膜后垄基宽、垄顶宽、垄高、覆土宽度、透光面宽度的稳定性系数均大于80%,断条率小于5%。
关键词:覆膜机;电动;主动覆土;田间试验
中图分类号:S223.5文献标志码:A地膜覆盖技术在提高土地利用率、水分利用效率和农作物产量方面具有广泛应用[1]。但人工覆膜存在效率低、作业成本高、劳动强度大等问题,已逐渐转向机械化作业。覆膜机类型众多,结构不同。可以从结构和功能上将其分为单一型和联合型[2]。单一型覆膜机主要由机架、动力传动系统、覆膜机构、压膜机构和覆土机构等组成。其中,石铁等[3]设计的1M-1型大小垄通用覆膜机适合山区、小田块地区使用。联合型覆膜机常见的有施肥覆膜机、起垄覆膜机和播种覆膜机等。安世才等[4]设计的1MLQS-40/70型全膜双垄沟铺膜机比4人力作业组效率提高30多倍。1QLFM-2型甘薯起垄覆膜机的起垄覆膜效果比人工高出15%,甘薯整体品质提升20%[5]。2BSKQM-2型双垄开沟全覆膜施肥精量播种机采用膜上扎孔播种,能够调节覆土量,机具能够连续平稳作业[6]。
贵州植烟区土壤板结严重、土块大,導致起垄后的垄体不饱满[7]。已有的覆膜机覆膜高度和厚度达不到烟草种植农艺要求,存在机具笨重、操作调试复杂等问题[8]。为了减轻烟农的劳动强度、降低用工成本、减少燃油废气排放,研制了一款小型电动覆膜机,可拆卸式的充电电池组减轻了整机重量。
1整机结构与工作原理
1.1整机结构及性能参数
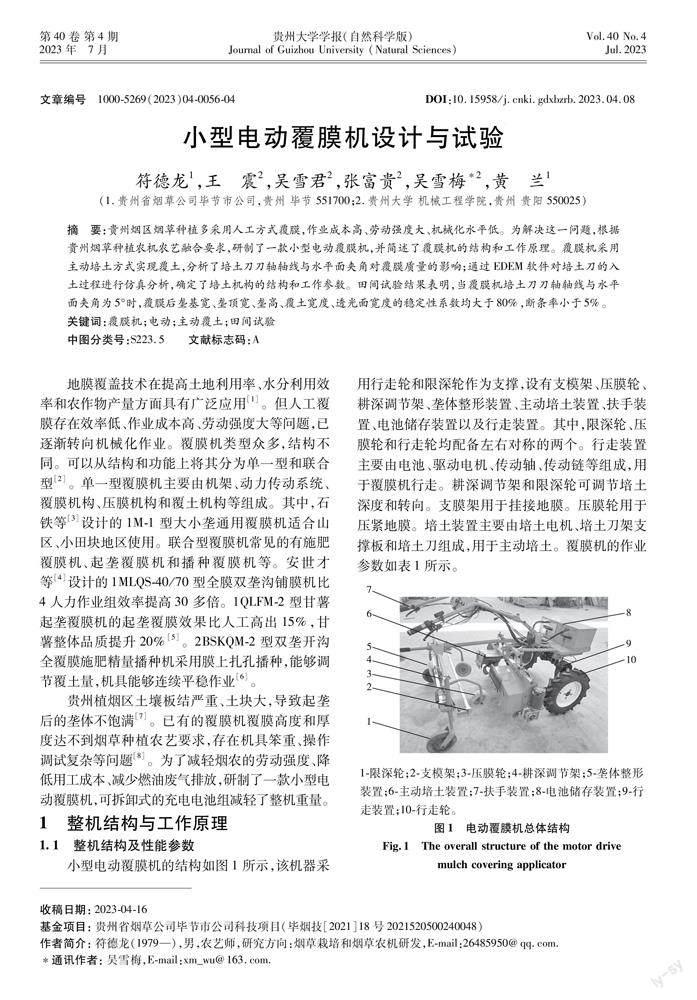
小型电动覆膜机的结构如图1所示,该机器采用行走轮和限深轮作为支撑,设有支模架、压膜轮、耕深调节架、垄体整形装置、主动培土装置、扶手装置、电池储存装置以及行走装置。其中,限深轮、压膜轮和行走轮均配备左右对称的两个。行走装置主要由电池、驱动电机、传动轴、传动链等组成,用于覆膜机行走。耕深调节架和限深轮可调节培土深度和转向。支膜架用于挂接地膜。压膜轮用于压紧地膜。培土装置主要由培土电机、培土刀架支撑板和培土刀组成,用于主动培土。覆膜机的作业参数如表1所示。
1.2工作原理
电动覆膜机作业时,驱动轴通过链传动带动驱动轮前进,同时两个培土刀电机带动培土刀旋转,将地垄两侧土壤进一步打碎并抛至地垄边缘,以完成培土作业功能。
作业开始时,拉出一段地膜,压入土中,随后启动机器,地膜卷开始转动并将地膜平铺于垄体上方,压膜轮在地垄两侧压着地膜边缘。同时,培土刀将垄沟内部土壤抛到地膜两侧边缘。完成一垄作业后,切膜刀切断膜,再进行下一垄作业。
2主动培土装置设计与仿真分析
2.1主动培土装置的设计
贵州山区土壤黏性大,土块团聚[9],采用覆土轮覆土,覆土高度和宽度达不到要求,本设计采用主动培土装置实现两侧地膜覆土,主动培土刀主要由碎土刀和勺刀组成,结构如图2所示。碎土刀与勺刀各两个,对称安装于刀盘上。其中,碎土刀的切削刃可切碎土块并防止杂草缠绕刀具;勺刀形如勺子,可将土壤向中间汇聚,从而减少土壤四处飞溅[10-11]。
2.2培土刀培土质量仿真分析
文献[12]研究表明,影响覆膜机覆土性能的主要因素有行走速度、培土刀转速、入土深度等因素。此外,培土刀刀轴轴线与水平面的夹角也会影响覆膜机的作业质量。为了探究这个因素对培土量的影响,设置培土刀刀轴轴线与水平面夹角为0°、5°、10°、15°、20°,并通过EDEM软件进行仿真,得到不同夹角下的培土质量。
2.2.1仿真参数设置
根据试验仿真要求,在EDEM中建立地垄简化模型。垄沟尺寸为2 000 mm×200 mm×80 mm(长×宽×高),其中,土壤覆盖整个垄沟模型。将土壤颗粒半径设置为4 mm,并在0.8~1.5倍半径范围内随机生成土壤颗粒。颗粒与颗粒、颗粒与培土刀之间的接触模型均采用Hertz-Mindlin with JKR模型,对应JKR表面能取值分别为7.91和5.5[13]。
前期试验表明,当行走速度为0.45 m/s、培土刀转速为400 r/min、培土深度为4.5 cm、刀垄距离为2.5 cm时,培土质量较好。通过离散元模拟主动培土装置在田间作业过程,以培土质量为评价指标,并在行走速度、培土刀转速、培土深度、刀垄距离一定的情况下对培土刀刀轴轴线与水平面夹角进行分析,确定最优夹角。
2.2.2仿真结果与分析
单因素仿真试验结果如表2所示。在整机仿真试验参数条件下,随着培土刀刀轴轴线与水平面夹角角度的增加,土壤质量呈先上升后下降的趋势,且在角度为5°时,达到峰值。表明培土刀刀轴轴线与水平面夹角为5°时,收集的土壤质量最高,即此参数下的覆膜质量最佳。
2.2.3主动培土过程仿真分析
以培土刀转速为400 r/min、培土深度为4.5 cm、刀垄距离为2.5 cm、行走速度为0.45 m/s以及培土刀刀轴轴线与水平面夹角为5°的整机作业参数为例,观察覆膜机培土刀主动培土过程仿真试验,培土过程如图3所示。
仿真时长为0 s时,地垄模型的垄沟中未生成土壤颗粒,培土刀静止放置于地垄模型右端,如图3(a)所示;2 s后,土壤颗粒已生成,培土刀刀片与土壤颗粒接触并开始旋转运动,如图3(b)所示;4 s 后,土壤颗粒在培土刀的作用下被抛起,由于刀罩的遮挡,大部分土壤颗粒被培土刀抛送至培土刀上方,地垄两侧的土壤颗粒被抛至地垄上,且不同大小的土壤颗粒被抛送的速度也不同,如图3(c)所示;第8 s,仿真结束,垄沟中的土壤颗粒受两侧培土刀作用向地垄中间运动,大部分土壤被抛送至地垄两侧,达到覆膜效果,只有少量土壤被抛送至地垄上侧,如图3(d)所示。符合覆膜机在田间作业时的实际作业状况。
3田間试验
3.1试验条件
为验证所研制的覆膜机的覆膜作业性能,在贵州省平坝区马场烟草种植试验田开展田间性能测试。
3.2试验方案
3.2.1试验指标
参考文献[14],覆膜质量检测指标主要有6个:垄高、垄基宽度、垄顶宽度、覆土宽度、透光面宽和断条率。要求指标均符合烟草种植农艺标准,并保持稳定系数大于等于80%,断条率不得超过5%。
3.2.2试验方法
小型电动覆膜机完成作业后,对测点处的垄进行切割,然后对覆膜后的各个参数进行测量并逐个记录,覆膜后地垄参数如图4所示,田间试验效果如图5、6所示。
4结论
以小型电动覆膜机为研究对象,通过EDEM仿真分析,确定了最优整机作业参数以及培土刀机构参数,并对田间试验结果进行了分析统计。研究结果表明,刀盘与刀片角度为5°时作业效果最佳。从田间试验中获得的相关指标表明,电动覆膜机符合山地覆膜作业农艺技术要求。尽管对自走式电动覆膜机进行了整机结构设计和关键部件仿真模拟,并对样机进行了田间试验,但仍存在一些不足,需要进一步研究,如培土刀的轻量化设计等。本文的研究成果可为类似的自走式电动覆膜机的研发提供参考。参考文献:
[1]普匡, 陈旭, 杨加珍. 垄沟覆膜对烤烟生长发育及产量品质性状的影响[J]. 西南农业学报, 2020, 33(9): 1905-1910.
[2] 尚晓明, 张娟利, 吴爱茹, 等. 贵州省烟草田间生产机械化发展现状及分析[J]. 兴义民族师范学院学报, 2021, 132(2): 115-120.
[3] 石铁, 许剑平, 孙文峰. 1M-1型大小垄通用覆膜机的研究设计[J]. 农机化研究, 2000(4): 74-76.
[4] 安世才, 张勇, 王赟, 等. 机械化全膜双垄沟铺膜机的应用与推广[J]. 农业机械, 2009(18): 89-90.
[5] 王淑红. 1QLFM-2型甘薯起垄覆膜机的生产试验与检测[J]. 农业机械, 2012(8): 68-71.
[6] 赵春祥, 张三强, 丁永清, 等. 2BSKQM-2型双垄开沟全覆膜播种机[J]. 农机科技推广, 2014(1): 45-46, 48.
[7] 吴长兵, 李再军, 张富贵, 等. 起垄机械研究现状及其在丘陵山区烟叶生产中的应用[J]. 现代农业科技, 2022, 819(13): 100-107.
[8] 王震, 吴长兵, 张富贵, 等. 山地丘陵烟草机械化研究现状及建议[J]. 农业工程, 2021, 11(12): 20-25.
[9] 周婧, 吴利. 湘中低山丘陵区土壤侵蚀时空变化及其对环境干扰的响应[J]. 水土保持研究, 2022, 29(5): 40-47.
[10]乐初枝. 2MZ-1型自走式铺膜机的设计[J]. 福建农机, 2010(4): 36-38.
[11]乐初枝. 2MZ-1型自走式铺膜机抛土压膜装置的设计[J]. 福建农机, 2011(2): 38-41.
[12]王震, 吴长兵, 李再军, 等. 不同作业参数对覆膜机培土量的影响研究[J]. 农机化研究, 2023, 45(10): 143-150.
[13]何彬涛, 戚江涛, 蒙贺伟, 等. 基于EDEM的开沟机导流装置性能分析及参数优化[J]. 中国农机化学报, 2019, 40(10): 25-29,41.
[14]戚源明, 张富贵. 现代山地烟叶生产机械化技术[M]. 北京:中国农业出版社, 2018.
(责任编辑:曾晶)
Design and Test of a Small Motor Drive Mulching Applicator
FU Delong WANG Zhen WU Xuejun ZHANG Fugui WU Xueme HUANG Lan
(1.Guizhou Tobacco Company Bijie City Company, Bijie 551700, China;
2.School of Mechanical Engineering, Guizhou University, Guiyang 550025, China)Abstract: Cultivation of tobacco in Guizhou tobacco growing area mostly uses manual mulch covering, which is characterized by high operating cost, high labor intensity and low mechanization level. In order to solve this problem, a small motor drive mulching applicator was developed according to the integration of agricultural machinery and agronomy for tobacco cultivation in Guizhou. The structure and working principle of the mulching applicator were briefly described. It adopts active soil covering mechanism to complete the soil cover operation. The paper analyzes the influence of the angle between the axis of the soil tillage knife and the horizontal plane on the mulch covering quality. Through the simulation analysis of the soil tilling process by the tillage knife with the EDEM software, the structure and working parameters of the soil covering mechanism are determined. The field test results showed that when the angle between the axis of the blade and the horizontal plane was 5°, the stability coefficients of the width of the ridge base, the width of the ridge top, the height of the ridge, the width of the soil covering, and the width of the transparent surface after mulching were all greater than 80%, and the broken strip rate was less than 5%.
Key words: mulch covering applicator; motor drive; active soil covering; field experiment
