反向 Sauvé-Kapandji 技术的标本模型建立及生物力学测试
2023-08-03杨辰刘路陈山林
杨辰 刘路 陈山林
先天性上尺桡融合 (congenital radioulnar synostosis,CRUS) 是一种前臂的先天畸形,该病往往表现为患肢固定旋前畸形。患者由于无法旋转前臂而使得其日常生活、工作受到极大影响。近年来,我院对该病患者采用改良反向 Sauvé-Kapandji 技术进行治疗,临床随访结果显示该手术方式结果令人满意,但该术式对于前臂旋转功能的改善尚缺乏相应的生物力学研究支持。因此,本研究通过制作尸体前臂标本制作上尺桡融合模型,并对模型施行反向 Sauvé-Kapandji 技术,从而验证该类手术改善上尺桡融合患者前臂旋转的能力。
材料与方法
一、研究对象
6例冰冻前臂标本纳入研究,所有标本均包括腕关节及肘关节,前臂完整无明显创伤,近端至肱骨远端。左侧 2例,右侧 4例。所有标本于 -30 ℃医用冰箱中保存,于室温下解冻 24 h 后,即刻进行试验,并完成观察、测量及记录工作。
二、研究方法
将 6例前臂标本使用随机数表法进行完全随机化分组,分为对照组和实验组。对照组标本直接测量前臂旋转活动,实验组标本建立上尺桡关节融合模型并进行反向 Sauvé-Kapandji 手术后再测量前臂旋转活动。
1.建立上尺桡关节融合模型:维持标本前臂肘关节屈曲 90° 位置,于肘后方进针,使用 1 枚克氏针固定肱尺关节,并使该克氏针平行于肱骨轴线。于标本的桡骨茎突处钻入 1 枚克氏针,该克氏针平行于肱骨轴线且垂直于前臂轴线 (对照组也按照同样方法置入定位克氏针)。将标本摆放至前臂旋转中立位。维持该体位,于肘关节外侧触及桡骨头,使用 1 枚克氏针横行固定上尺桡关节 (图1)。
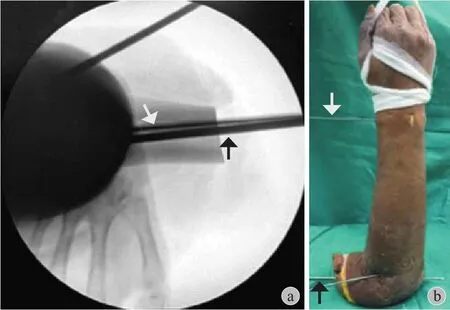
图1 桡骨茎突处克氏针与上臂轴线相平行,且同样平行于穿过肱骨并固定肱尺关节的克氏针 a:透视下可见 2 枚克氏针互相平行,白箭头为桡骨茎突处克氏针,黑箭头为肱尺关节处克氏针;b:大体照片,可见桡骨茎突处克氏针 (白箭头) 与肱尺关节处克氏针 (黑箭头) 互相平行,另有 1 枚克氏针水平固定上尺桡关节Fig.1 The K-wire at radial styloid was vertical to the axis of the forearm, parallel to the axis of the arm, and was also parallel to the K-wire which passed through the humerus and fixed the humeroulnar joint a: The 2 K-wires marked by black and white arrow were parallel to each other under fluoroscopy.The white arrow indicated the K-wire at radial styloid, and the black arrow indicated the K-wire at humeroulnar joint; b: The gross appearance of the specimen.The K-wire at radial styloid (white arrow) was parallel to the K-wire at humeroulnar joint (black arrow), and was vertical to the axis of forearm.Another K-wire was used to fix the proximal radioulnar synostosis
2.反向 Sauvé-Kapandji 手术:通过前臂 Henry入路切开皮肤,分离皮下组织,自肱桡肌及桡侧腕屈肌间分离组织,显露肱二头肌及旋后肌。有限切开旋后肌并显露桡骨近端 (图2),截除长约 1 cm 骨块,并完整切除周围骨膜 (图3)。

图2 自 Henry 入路切开皮肤,显露桡骨近端及相应旋后相关肌肉a:旋后肌腹 (五角星),肱二头肌腱 (三角);b:于箭头处有限切开旋后肌,并于肱二头肌腱 (三角) 远端显露桡骨近端 (箭头)Fig.2 The incision was made via Henry approach, and the supination-related muscles and proximal radius were exposed a:Muscle belly of supinator (pentagon), biceps brachii tendon(triangle); b: The supinator was incised and the radius (arrow) was exposed at the distal end of biceps brachii tendon

图3 于桡骨近端截除长约 1 cm 骨块,完成反向 Sauvé-Kapandji 手术 a、b:箭头所指为截骨处,量尺处可见截骨长度约 1 cm图4 测量前臂旋转角度 a:大体旋后位;b:大体旋前位;c:透视下旋后位;d:透视下旋前位 (五角星为桡骨茎突处克氏针,箭头处为肱尺关节处克氏针,三角处为固定上尺桡关节的克氏针)Fig.3 A 1 cm bone fragment was removed at proximal part of the radius to complete the reverse Sauvé-Kapandji operation a - b: The osteotomy site was marked with arrow, and the removed bone fragment was about 1 cmFig.4 Measure the rotation angle of forearm a: The gross appearance of supination position; b: The gross appearance of pronation position; c:The supination position under fluoroscopy; d: The pronation position under fluoroscopy (Pentagon: K-wire at radial styloid.Arrow: K-wire at humeroulnar joint.Triangle: K-wire that fixed the proximal radioulnar synostosis)
3.测量前臂旋转活动度:将标本前臂远端向上悬挂。(图1b) 被动旋转腕关节直至旋前、旋后最大位,使用 C 型臂垂直于肱骨进行透视,在此体位下桡骨茎突处克氏针及肱尺关节处克氏针之间夹角即为前臂旋转角 (图4)。分别测量对照组及实验组的前臂旋前、旋后最大角度并记录。
三、统计学处理
分别统计两组标本的平均最大旋前、旋后角度,检验两组数据是否符合正态分布。若为正态分布,使用两样本t检验分析两组标本的最大旋前、旋后角之间有 / 无统计学意义 (P< 0.05),若为非正态分布,则使用独立样本秩和检验进行统计分析。
结 果
共 6例新鲜冰冻前臂标本纳入研究,其中 2例左侧、4例右侧。两组标本的最大旋前、旋后角度皆符合正态分布。对照组中,正常平均最大旋前角度为 76° (60°~84°),平均最大旋后角度为 91.7°(85°~100°),最大平均旋转角度为 167.7° (145°~174°)。实验组中,固定上尺桡关节后,前臂旋转角度为 0°,施行反向 Sauvé-Kapandji 术后,平均最大旋前角度为 67° (60°~78°),平均最大旋后角度为 84.5° (70°~90°),最大平均旋转角度为 151.5°(135°~168°)。两组标本的旋转范围、旋前、旋后差异无统计学意义 (P< 0.05) (表1)。
表1 两组术后平均旋转最大角度比较 (n = 6,±s)Tab.1 Comparison of the average maximum rotation angle after surgery between the two groups (n = 6, x- ± s)
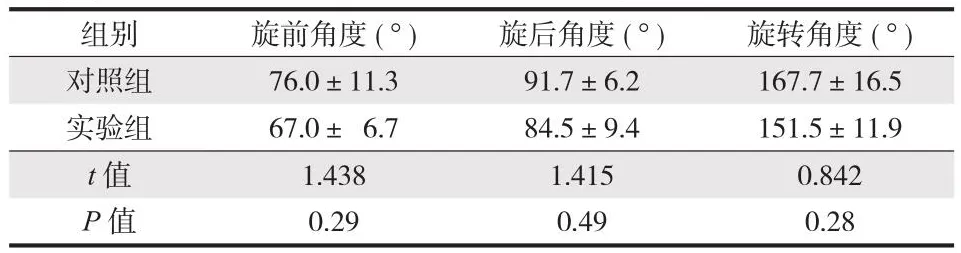
表1 两组术后平均旋转最大角度比较 (n = 6,±s)Tab.1 Comparison of the average maximum rotation angle after surgery between the two groups (n = 6, x- ± s)
组别旋前角度 (°) 旋后角度 (°) 旋转角度 (°)对照组76.0±11.391.7±6.2167.7±16.5实验组67.0± 6.784.5±9.4151.5±11.9 t 值1.4381.4150.842 P 值0.290.490.28
讨 论
前臂旋转功能对于上肢实现精细活动十分重要,该功能主要由前臂尺、桡骨经由上尺桡关节、下尺桡关节相协调配合,使得桡骨围绕固定的尺骨进行旋转活动,若上、下尺桡关节任意一关节出现僵硬、融合等问题,都将极大地影响前臂主、被动旋转活动。目前,若患者下尺桡关节存在僵硬、融合,选择单纯松解、关节置换、Darrach 术式、Sauvé-Kapandji 术式等来改善前臂旋转功能。
与下尺桡关节疾患相对应的,上尺桡关节也可因为创伤或先天畸形等原因导致关节僵硬或融合,而相应的治疗手段包括肘关节松解、关节置换、桡骨头切除及反向 Sauvé-Kapandji 技术等。其中,虽然在既往的文献研究中,反向 Sauvé-Kapandji 技术已经出现至少 60 余年[1],并在期间被不同的医师反复提及、使用或予以改良[2-6],且治疗效果令人满意,但该手术方式仍未被深入研究,也尚未见该术式对旋转功能改善结果的标本研究。
在腕关节,Sauvé-Kapandji 技术已经被诸多研究及临床治疗效果所验证,对于特定人群具有较好的改善前臂旋转的手术效果。该术式将下尺桡关节融合,并在融合稍近端处的尺骨干上切除一段骨质,创建一个“新的下尺桡关节”,从而重建前臂旋转功能。而与之相对应的反向 Sauvé-Kapandji 技术于上尺桡关节融合的稍远端处的桡骨干上切除一段骨质,创建一个“新的上尺桡关节”。而在这个“新的上尺桡关节”远端,桡骨仍有旋前圆肌、旋前方肌、旋后肌附着 (图2)。理论上,该术式能极大地改善上尺桡关节骨性融合患者前臂的主被动旋转功能。
本研究通过建立使用反向 Sauvé-Kapandji 技术治疗的上尺桡融合的前臂模型,测量术后前臂最大旋前、旋后角度,结果显示上尺桡融合前臂在术前无被动旋转功能,术后前臂旋前、旋后角度均得到极大改善,且与正常状态下对照组相比,前臂旋转范围、旋前角度及旋后角度无明显差异。
本研究仍存有一些不足。虽然已经将反向Sauvé-Kapandji 技术应用于 CRUS 患者的治疗中,并取得了较好的效果,但 CRUS 患者的骨性畸形不仅仅存在上尺桡关节融合,同时也包括桡骨旋前弓过大、旋后弓消失,尺骨自身旋转畸形等伴随畸形。此外,CRUS 患者还伴有旋后肌发育差、旋前圆肌和前臂骨间膜挛缩等软组织异常。本研究中仅模拟了上尺桡关节融合这一最主要的畸形,没有模拟其它伴随畸形,这将影响该研究对支持反向 Sauvé-Kapandji 技术应用于 CRUS 治疗的证据力度,须进一步研究。
此外,既往的文献提示,反向 Sauvé-Kapandji 术后患者的前臂骨间膜无法承担较大的前臂纵向复合,这也是阻碍该术式推广的一个重要原因[4],希望后续能够找到相应的解决办法,改善该术式术后的潜在纵向不稳定的问题,并进行相应的生物力学研究。
综上所述,该研究验证了反向 Sauvé-Kapandji技术能较好地改善上尺桡融合患者前臂旋转受限的问题,为后续临床试验提供了依据。研究结果表明反向 Sauvé-Kapandji 技术是治疗包括 CRUS 在内的上尺桡关节融合疾患的一种有效的手术方式。
