低空无人机三维倾斜摄影技术测绘大比例尺地形图应用研究
2023-08-03张治国
张治国
(甘肃省自然资源规划研究院,甘肃 兰州 730000)
1 引言
在测绘技术设备和技术方法迅速发展的时代,借助“实景三维中国”的提出并实施,低空无人机倾斜摄影测量技术也突飞猛进,被广泛应用。倾斜摄影测量技术自动化程度较高,通过软件匹配,人为干预较少,大大提高了三维建模效率。倾斜摄影测量技术利用多台高分辨率相机从垂直、左倾、右倾、前倾、后倾5个方向对地表实体进行高重叠率拍摄,能快速获取地表实体丰富的数据信息,真实准确地反映地表实体情况[1]。
文章主要结合实际工作案例,通过同一地点多次航拍采集实验,采用外业实测数据、内业解算、采集数据进行对比计算差值,统计成果精度。论述采用此项技术进行大比例尺地形图测绘的一般程序及误差来源。
2 总体技术路线
采用低空无人机倾斜摄影测量技术开展测绘任务,首先应充分收集测区资料、开展现场踏勘,然后设计航线、进行航飞,利用专业软件完成数字表面模型、数字高程模型、数字正射影像图和实景三维模型生产,再结合实景三维成果采集任务区的地形地貌以及地物要素信息,生产制作数字线划图,最后整理形成大比例尺地形图[2]。具体在大比例尺地形图测绘工作中,使用该技术鼓励采用更加先进技术获取更高标准的产品。
1)分析收集资料,利用可用基础资料和空中三角测量结算方案,制定事前外业像片控制点点位图,并进行测量。施测按照图根点方法进行。
2)调试无人机及三维数据采集设备,规划航线,选择合适天气进行三维数据采集。
3)利用内业解算软件,解算垂直及倾斜相片的外方位元素及其他内业解算必须数据。
4)利用内业倾斜数据处理软件,自动匹配制作模型,自动映射纹理,生成实景真三维模型。
5)软件输出三维模型及OSGB数据。
6)导入原始数据、结算数据、模型等数据全数比对检查。
7)对导入初始数据,软件结算,数据生产等进行过程检查,必须达到质量要求,才能进入下一工序,避免误差积累。
8)全部检查合格后,将模型成果数据提交数据采集部门进行下一步工序,地形图数据采集。
3 倾斜摄影基本要求
3.1 地面分辨率
平均地面分辨率主要应根据测图成果比例尺确定,其次还要考虑项目区地形条件,航拍无人机及航拍设备的具体性能等。
3.2 影像质量要求
拍摄相片影像要清晰,色彩要饱和,色调要一致,能辨别与地面分辨率相适应的细小地物影像。符合全数字外业调绘和内业判读规定。避免进入云层等大面积遮挡的缺陷。
3.3 飞行平台要求
航拍载体采用低空具有自动驾驶功能的无人机,飞行姿态能满足作业要求。具有GNSS导航功能,后查分功能,作业时间大于30 min。
3.4 航摄仪性能要求
垂直及倾斜相片的外方位元素可准确解算,每部相机像素不得低于2 500万像素。
3.5 航摄基准面及重叠度
1)基准面:根据成果要求、航摄区的地形起伏、飞行安全条件,尽可能选择分区内低点平均高程为航摄基准面。
2)重叠度要求:在高差较大及建筑物密集地区,垂直影像航向重叠度应大于65%,一般应设置为70%~80%;旁向重叠度应大于40%,一般应设置为50%~70%;倾斜影像重叠度应设置为大于60%即可。
3.6 航摄分区
1)分区界线与图廓线相一致。
2)分区内地表相对高差小于1/4设计航拍高度。
3)分区内相对高差符合要求,并满足航拍轨迹是直线时,分区覆盖范围应尽量涵盖拍摄区。
4)分区内相对高差较大,地表突变或者航拍有特殊要求时,容许打破图廓线规定,重新设定分区航拍。
5)倾斜摄影时应根据公式进行航向与旁向外扩。具体公式如下:
N=tanθ/(2tanθ(β/2)×(1-P))
式中:N为理论超出值,单位为条;θ为倾斜相机角度,单位为度(°);β为倾斜相机视场角,单位为度(°);P为航向或旁向重叠度。
3.7 航线敷设
航线敷设应遵从以下原则:
1)航线飞行方向按照项目区内多数建筑走向设计,与建筑方向平行或垂直方向飞行,并考虑当地风向,尽量逆风飞行,避免侧风作业。
2)如无人机有仿地飞行功能,相机曝光点最好按照高差起伏设定,如无人机没有仿地飞行功能,相机曝光点最好按照航拍距离设定。
3)如项目区有大面积水域覆盖时,航线设计应注意像主点不要落水。
4)如项目区内地表建筑物高度、密度较低时,可适当减小航拍重叠度;如地表建筑物高度、密度较高时,可适当增大航拍重叠度。
3.8 天气选择
航拍作业时应参考当地实时天气预报,最好在阴天或者晴天作业,晴天应在中午太阳阴影最小的时候;雨雪天或者大雾、沙尘等能见度较低的时候禁止作业,保证航拍质量。
4 航摄实施
4.1 航摄准备
整理分析项目区基础资料,编写项目技术设计书,并报甲方审批。筹备适合该项目的无人机和三维倾斜数据获取设备,按空域申请流程办理空域使用批文,禁止黑飞作业。
4.2 像控点布设、测量
按照项目技术设计规定,相控布设一般采用事前布控。依据方案设计布设像控点位,像控点图形应采用“L”形,大小要适当。能长时间保留的如水泥地表可用油漆喷涂,不能长时间保留的地表可用防水布打印后铺设,要做到在空三加密刺点中点位清晰可见。像控点测量一般采用RTK方法测量较为方便,精度控制在图根点精度即可。RTK方法测量应注意大地高与正常高之间的转换。
4.3 航摄飞行
选择合适的天气,空旷的起降场地准备航拍作业。首先,安装调试设备,做飞前检查、机务检查,安装并检查航摄仪工作是否正常,导入设计好的航线,准备起飞作业。其次,飞机起飞后,检查飞机飞行是否正常。如飞行异常,尽快降落,查找原因。如飞行正常,切入飞机自驾模式,追踪作业点。最后,监视地面站,查看飞机作业姿态,是否按设计航线航拍,飞机俯仰角、横滚角是否符合航拍要求。
4.4 现场数据检查及下载
航拍结束飞机安全降落后熄火,立即检查机载POS与照片数量是否一致,记录是否完整,GNSS定位数据是否失锁;检查照片质量,清晰度是否满足航拍要求,是否进云或有遮挡显现,曝光度是否符合要求等问题出现。
检查合格后,现场下载机载POS数据、照片数据、查分定位数据,以免造成转场数据遗失,并做好数据备份。将数据安全送至数据处理部门。
4.5 数据预处理与检查
数据处理部门收到数据后,要将机载POS数据、照片数据、查分定位数据一一对应做预处理工作,检查全部合格后,提交下一步工序。
4.6 全数字空中三角测量
利用检验合格的像片数据、查分POS数据及像控测量成果,采用实景三维建模软件Context Capture Center进行空中三角测量。导入已知的相机参数建立空三工程,采用POS数据成果进行航带内及航带间影像同名点匹配,生成海量匹配点。
影像匹配完成后,进行自由网平差计算,删除或调整超限点。精度满足要求后,加入人工量测外业控制点,进行绝对定向光束法平差。
4.7 三维模型生产
在空三加密后,利用Context Capture Center三维建模软件全自动生产三维模型。三维模型成果完全根据航摄获取的影像数据制作,可以真实还原地物的空间位置、形态、颜色和纹理。模型生成后可直观查看测区范围内所有地物特征及建筑物细节[3]。
4.8 内业成图
将最终三维模型成果导入EPS测图软件,采集地表附着物界址点、拐角点及中心点等信息,绘制地形图,根据外业调绘资料完善属性,形成最终成果。
4.9 成果检查
内业数据采集完成后,要对测图成果进行精度检查。精度检查采用坐标比对方式进行,即外业挑选一定数量的明显点位进行仪器实测坐标与内业采集坐标做比对。计算X、Y、Z三个方向的偏移值,最终计算平面和高程中误差。下表为本单位一个项目误差统计表,从表1中可以看出,此项目平面和高程中误差分别是0.038 m和0.043 m,符合1∶500地形图测图精度。
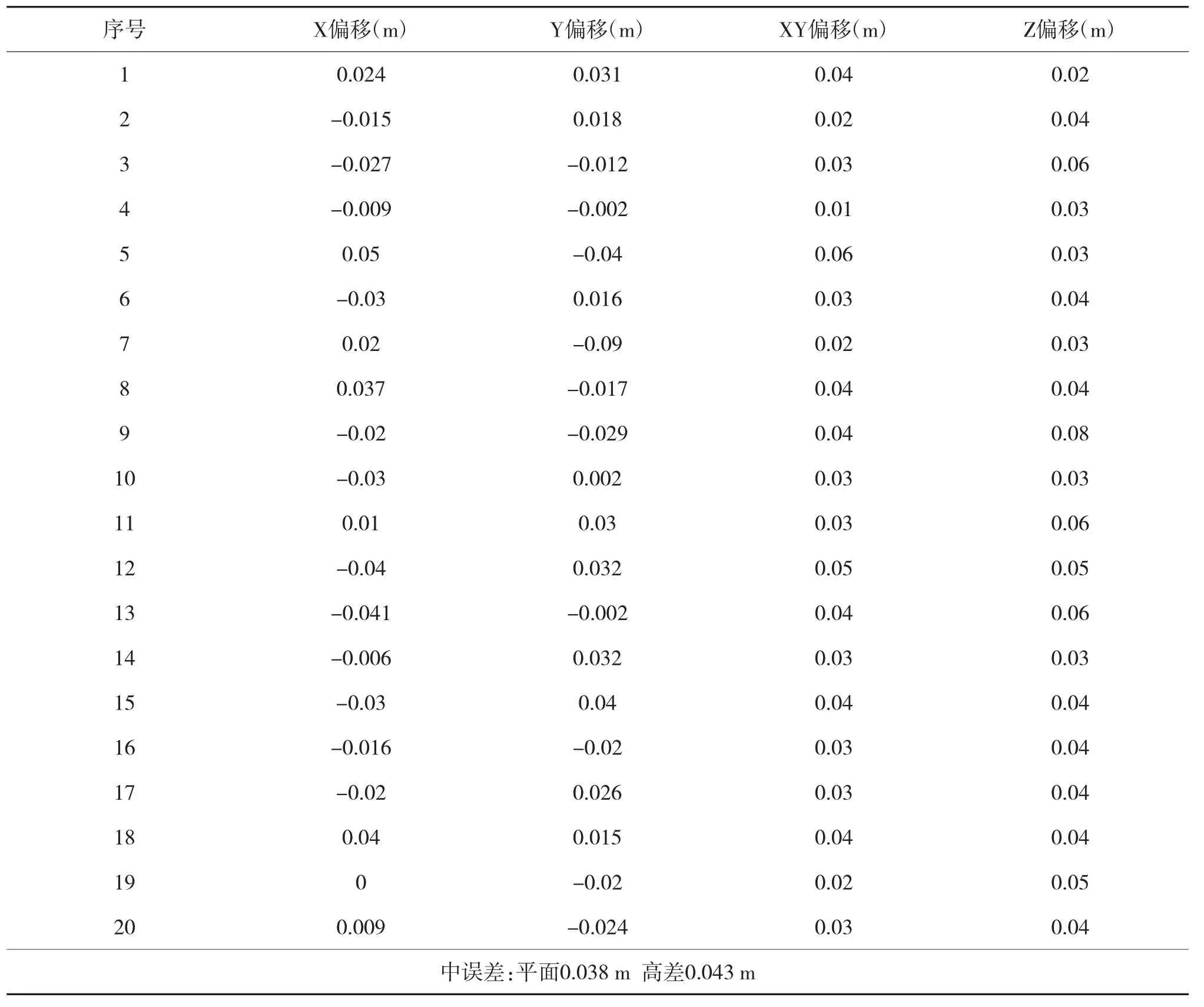
表1 成果误差统计表
5 误差来源分析
5.1 地形高差产生的误差
项目组采用两个高差不同的村级试点进行数据采集。试点1村庄高差在40 m左右,为原始村庄,村庄建设依托地形较为混乱。试点2村庄高差在10 m左右,为移民搬迁村,村庄建设整齐。从后期处理精度统计得出,在高差较大、地形复杂、房屋密集的村庄(高差在40 m左右),点位差值在10~25 cm,边长差值也在10~20 cm。三维立体测图精度勉强能达到1∶2 000测图精度;在高差不大地形相对平坦的村落(高差在10 m左右),点位差值在5~10 cm,边长差值在5~10 cm。三维立体测图精度可以达到1∶1 000测图精度;由此可见,实际地形高差越小,点位误差越小:地形高差越大,点位误差越大。在实际工作中如果项目区高差较大,为保证精度要求,可考虑分层分区拍摄,项目区高差最好控制在1/4航高。
5.2 像控测量产生的误差
像控点布设及测量严格按照要求规范进行。首次作业相控点采用1 m见方的半圆型图标(图1),施测为手扶对中方式;再次作业更改为A4纸张大小“L”型图标进行布点(图2),作业更改为对中杆施测,尽可能减少相控点测量误差。经后期计算,像控点精度得到较大提高,精度控制在1 cm以内。

图1 半圆型图标

图2 L型图标
5.3 解算及采集产生的误差
如图3所示,由于地形高差较大,前面房顶与后面道路或者后排房屋地面相平,或者房屋太密集,造成互相遮挡,植被遮挡,倾斜相机不能拍摄到房屋立墙面,立体模型不能有效搭建,不能准确测出房屋的边线,采集边线与实测边线偏差较大。这是此次试验主要误差来源。

图3 地形遮挡示意图
5.4 人员采集产生的误差
内业采集使用EPS软件,内业采集人员的熟练程度,也很大程度影响最终成果的精度。经验不足的采集人员,采集选位不能选取最佳的点位测绘。出现偏离现象,偏离的差值与采集人员熟练程度有很大关系。所以得出,采集人员的熟练程度也是成果误差来源之一。建议对内业数据采集人员进行专业软件使用培训,并加强内业采集联系,有必要跟随外业采集人员熟悉外业工作流程,掌握房屋等采集规律。
5.5 航拍质量产生的误差
好相机能拍出好的影像,决定影像精度的因素包括了多方面,焦距、像素、感应器尺寸等。作业采用合适的航拍设备,采用适合无人机飞行速度的相机快门值,采用适合航拍高度和天气的光圈值、ISO值也很重要。除此之外,航拍时间的选择也不可忽视,尽量选在多云的天气作业,或者晴天时选择午间太阳阴影面积最小的时候作业为最佳[4]。
POS精度影响空三运算的结果,进而影响重建模型的细节和几何形态。在相机、飞行高度等因素不变的基础上,高质量的POS能够辅助还原完整的几何细节,对飞行姿态的容忍度更高并提高空三效率。建议最好搭载后查分系统,获取高质量的POS数据[5]。
6 结语
利用低空无人机三维倾斜摄影技术测绘大比例尺地形图应用已非常广泛,将逐步替代传统大比例尺测绘手段。提高作业效率,提高测绘精度,是此技术发展的方向。测绘误差来源途径很多,文章也介绍了常见的几种误差来源,地形高差产生误差、像控测量产生的误差、解算及采集产生的误差、人员采集产生的误差、航拍质量产生的误差,提出了解决建议,希望为低空无人机三维倾斜摄影技术的发展和应用提供经验。
