农业无人机植保作业全覆盖航线科学规划方法研究*
2023-08-02覃剑波
覃剑波
(广西现代职业技术学院,广西 河池 547000)
农业无人机植保作业全覆盖航线科学规划,对提高作业效率、精确定位喷洒位置、降低环境风险、增强安全保障以及推动行业发展等多个方面都具有重要意义[1]。在无人机植保作业过程中,其作业安全受到诸多因素的影响,包括天气、地形、建筑物等。科学规划航线可以提前考虑到这些因素,降低无人机遇到危险和失控的可能性,从而增强作业时的安全保障。基于此,本文明确了全覆盖航线规划效果评价指标,并提出了航向旋转后的坐标位置计算方法、全覆盖航线规划方法,旨在为提升植保无人机作业效率提供借鉴与参考。
1 全覆盖航线规划效果评价指标
全覆盖航线规划效果评价指标包括覆盖率、重复覆盖率、其他约束条件。
1)覆盖率是评价全覆盖航线规划效果的重要指标[2],覆盖率越高,说明航线规划设计的植保作业实现完全覆盖的可能性越高,有效避免了漏洞和重复喷洒等问题。覆盖率公式为:
式中,Z1表示覆盖率;Sf表示覆盖面积;Sd表示地块面积。覆盖率的理想值为100%,但在实际作业中,受多重因素的影响,无法达到理想值。
2)重复覆盖率用于评估航线规划设计的植保作业是否存在重复覆盖。重复覆盖率越低,说明航线规划的植保作业实现精准喷洒的可能性越高,减少了农药和化肥的浪费,提高了作业效率。重复覆盖率公式为:
式中,F表示重复覆盖率;Sc表示重复覆盖面积;Sj表示作业地块实际面积。重复覆盖率的理想值为0%,但在真实作业中,无法达到理想值,需要探索重复覆盖率的最低值。
3)其他约束条件包括无人机植保作业的自然环境、设备本身等,需要根据作业实际需求和设备参数情况,对其性能进行评价。
2 航向旋转后坐标位置计算方法
在规划植保作业路径前,需要建立作业地块坐标系,为构建航线规划模型奠定基础。假设已知像素坐标系为uOv,其横坐标为u,表示栅格图像的行数;纵坐标为v,表示栅格图像的列数。旋转后的横坐标为x,纵坐标为y,考虑航向旋转后坐标点的位置问题,需要计算出子作业区域间隔线与多边形地块的交点,用一次函数两点表达式表示:
式中,x1、y1分别表示坐标点1 的横坐标与纵坐标数值;x2、y2分别表示坐标点2的横坐标与纵坐标数值。
得到旋转后的坐标点,可以提升航线规划的精准度,但会增加计算量与前期的工作难度,提升了航线规划工作成本。
3 全覆盖航线规划方法
3.1 作业区域划分
作业区域划分是全覆盖航线规划的一个关键步骤,作业区域划分的目的是将需要覆盖的大面积区域分割成若干个小区域,使得每个小区域都能够被全覆盖。作业区域划分的方法包括:1)均匀划分法,将整个作业区域均匀地分成若干个小区域,每个小区域的形状和大小相同,这种方法适用于作业区域比较规则的情况[3];2)栅格划分法,将整个作业区域划分成若干个大小相等的栅格,在栅格中心点处设立航点,这种方法适用于作业区域比较复杂的情况;3)聚类划分法,根据作业区域中各个点之间的距离或密度等特征,将其划分成若干个聚类区域,然后在每个聚类区域中设置航点[4];4)基于图论的划分法,将作业区域看作是一个图,通过图论算法将其分成若干个连通的区域。在每个连通区域中设置航点,这种方法适用于作业区域比较复杂、有障碍物等情况。
在作业区域划分的过程中,需要考虑无人机航向与作业区域边界的倾斜角问题。若倾斜角过大,则容易出现遗漏覆盖的问题,如图1所示。
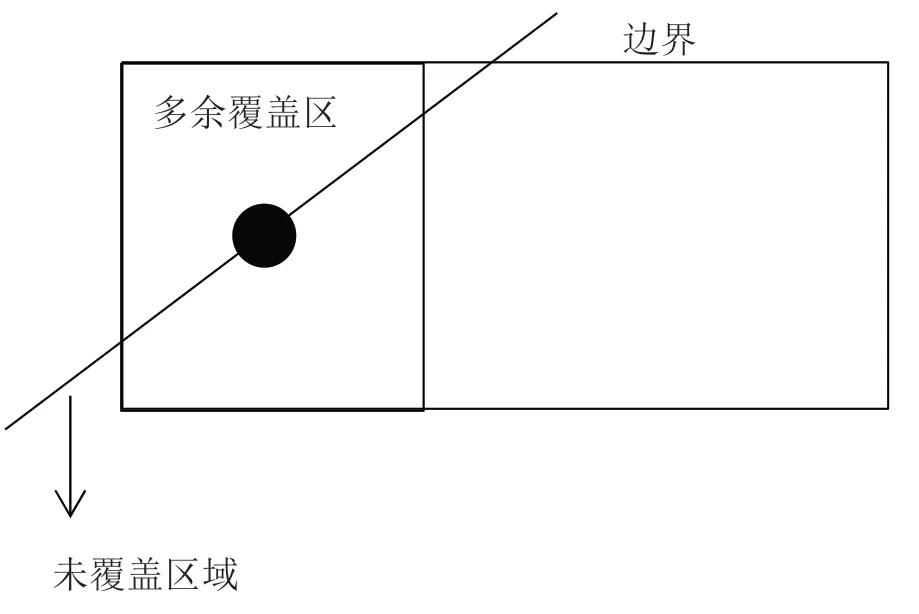
图1 倾斜角过大出现的遗漏覆盖问题
基于此,本文提出一种适用于不同作业边界类型的全覆盖处理方法。首先,针对倾斜角过大而出现遗漏覆盖的问题,外扩航路点,提升覆盖率[5]。然后,为保障无人机作业安全,内缩航路点避开边界,以此实现全覆盖。
3.2 子作业区域规划
在航线规划初期,需要对子作业区域进行划分,子作业区域规划示意图如图2 所示。在具体规划过程中,首先要对不规则的作业地块的顶点进行提取,获得顶点坐标的最大值与最小值[6]。然后,以坐标点的轴最小值为起点,以最大值为终点。
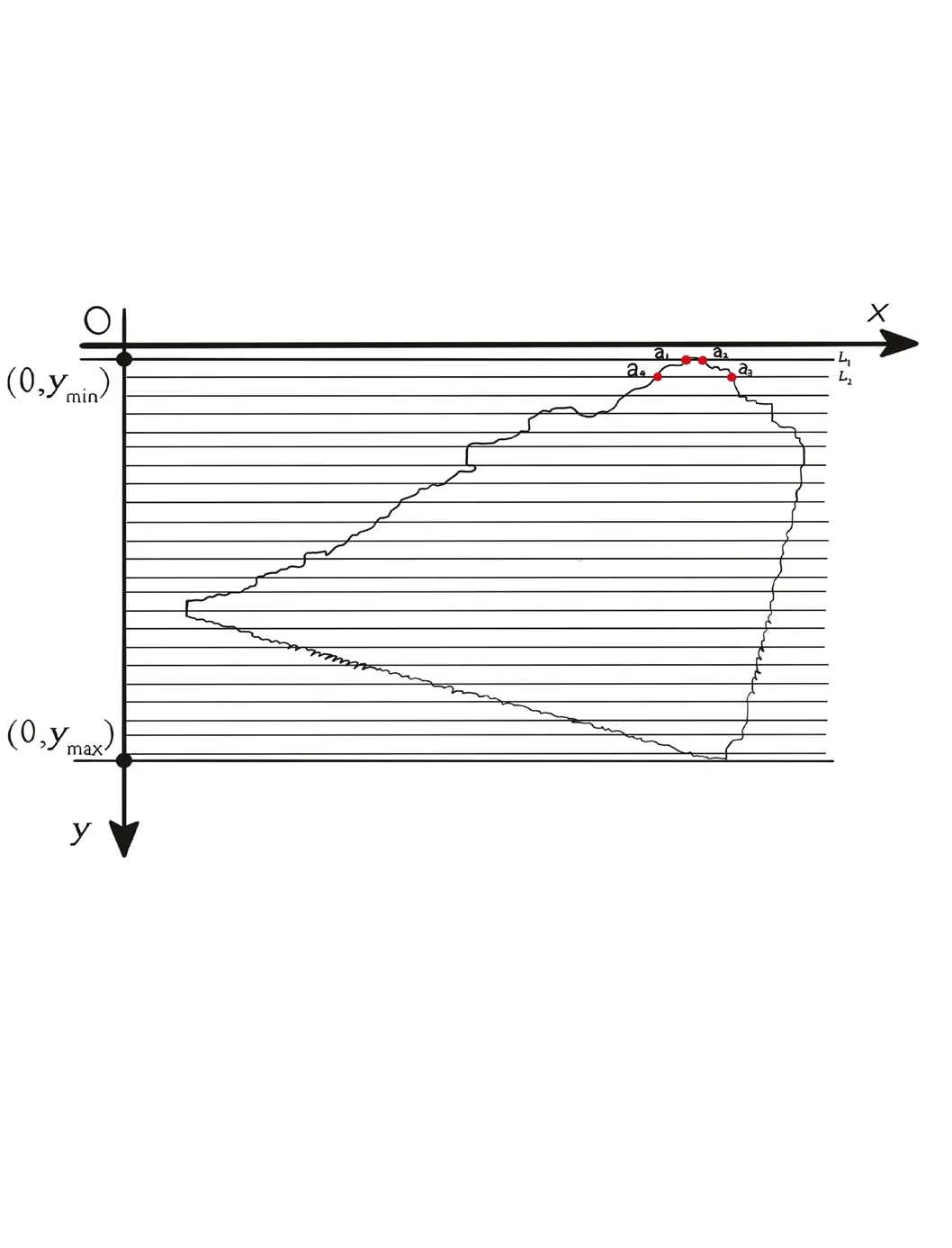
图2 子作业区域规划示意图
图2 中横线为子作业区域间隔线,红色圆点为间隔线与作业区域边界交点。为了在子作业区域规划中明确子作业区域范围,需要判断子作业区域边界与相邻两条间隔线的交点坐标,得到子作业区域范围。例如,设计四个坐标点:a1、a2、a3、a4,子作业区域n的边界与相邻两条间隔线Lny与Ln+1y交点,间隔线与边界交点坐标如图3 所示。
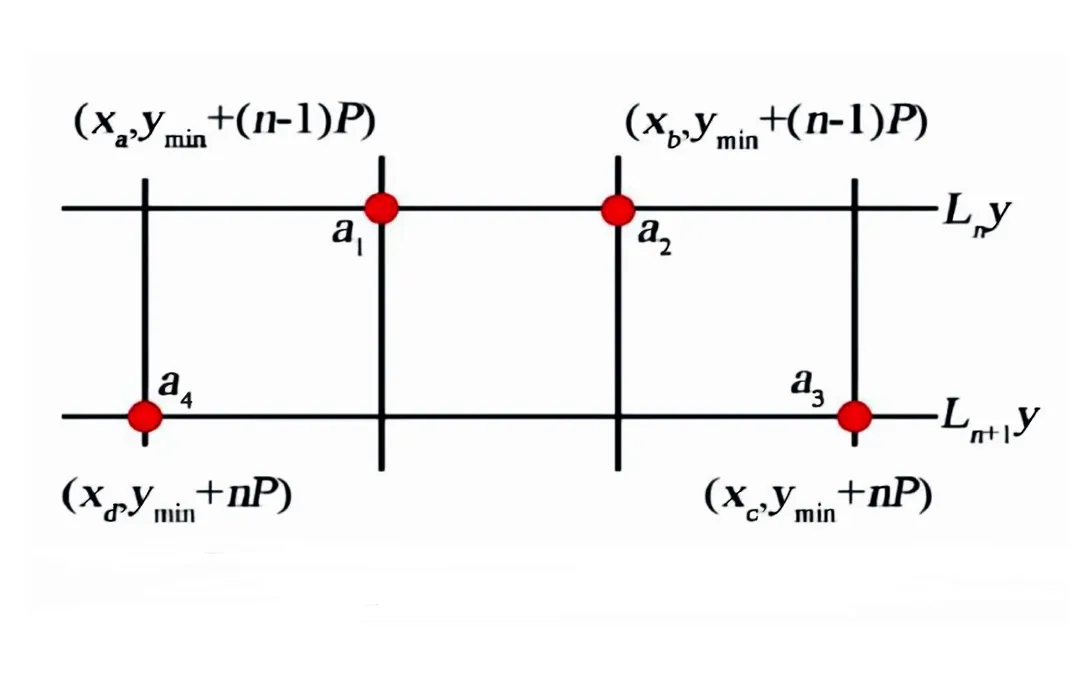
图3 间隔线与边界交点坐标
3.3 开放边界航线规划
开放边界航线规划需要根据作业区域的实际情况,将航线设置为开放状态,使无人机通过实际情况分析,实现自由飞行,进而提高植保作业的灵活性和效率[7]。在开放边界航线规划过程中,需要明确子作业区域数量、子作业区域范围、航路点坐标。
3.3.1 子作业区域数量计算
在计算子作业区域数量的过程中,需要先计算得出作业区域数量、间隔线数量、无人机转弯次数等信息,并获取作业地块纵坐标的最大值与最小值,从而计算得出子作业区域数量,计算公式为:
式中,[Q]表示子作业区域数量,Q的取值规则为向上取整数,若无法整除,则作业区域+1;ymax表示作业地块y坐标的最大值;ymin表示作业地块y坐标的最小值;P表示无人机作业喷幅宽度。
利用公式(4)可以计算得出间隔线的数量Z2和植保无人机作业时的转弯次数C,计算公式为:
需要注意的是,在子作业区域数量实际计算过程中,需要充分考虑天气、地形、风速等对无人机飞行的影响。
3.3.2 子作业区域范围计算
在计算子作业区域范围的过程中,需要在开放边界的地块内,提取出四个交点坐标,明确x轴的最大值和最小值,并将其带入相邻两条间隔线的y值[8]。由于y值最大值与最小值的差会增加一个子作业区域,导致两条相邻间隔线与地块边界之间存在两个交点,所以在子作业区域范围的计算过程中,需要提取两个交点的坐标中x轴的最大值和最小值,并将其带入y值,从而获得范围坐标。设定交点坐标中x的最大值和最小值分别为xc、xd,则得到子作业区域的四个顶点坐标分别为:(xc,ymin+nP)、(xd,ymin+nP)、(xc,ymin+(n-1)P)、(xd,ymin+(n-1)P)。
3.3.3 航路点坐标计算
在计算航路点坐标的过程中,可以计算得出子作业区域的航路点和开放边界子作业区域的航路点,确定开放边界的航路点区域,并对作业区域的其他航路点进行计算,得到开放边界航路点坐标。需要注意的是,无人机机身位于喷幅宽度P的半径位置上,所以在确定航路点值时,需要向内部缩进0.5P。另外,在实际航线规划中,对航路点进行往复式遍历,所以在得到航路点遍历顺序后,对航路点遍历顺序进行调换[9]。例如,调换前的航路点遍历顺序为a1、a2、a4、a3,调换后的遍历顺序为a1、a2、a3、a4,剩余子区域按照此顺序递推。若最后分组的航线坐标数量无法满足位置调换的条件,则可以不进行调换。
3.4 障碍边界航线规划
障碍边界航线规划是在无人机植保作业中,为了避免无人机撞墙、撞树等情况而设计的一种航线规划方式[10]。其主要思路是在规划航线时,考虑到作业区域内的障碍物位置和形状等因素,使得无人机能够在保证覆盖率的前提下,安全绕过障碍物进行喷洒。与开放边界航线规划相同,障碍边界航线规划需要明确子作业区域数量、子作业区域范围及航路点坐标。
3.4.1 子作业区域数量计算
障碍边界航线规划中,子作业区域数量计算同公式(4)。
3.4.2 子作业区域范围计算
在障碍边界航线规划中的子作业区域范围计算过程中,Q的取值规则为向下取整数,若最后一个子作业区域无法满足喷幅宽度P,则舍弃该子作业区域;若相邻两条间隔线与地块边界的交点数量为奇数,则舍弃该子作业区域。
3.4.3 航路点坐标计算
在障碍边界航线规划的航路点计算过程中,若已知的子作业区域的两个航路点的y值表示为ymin+(n-0.5)P,则障碍边界子作业区域的航路点为(xb-0.5P,ymin+(n-0.5)P)、(xb+0.5P,ymin+(n-0.5)P)。
由于实际航线规划需要对航线坐标进行往复式的遍历,所以需要对航路点进行分组和调换,在遍历所有航路点后,得到障碍边界覆盖下的航线坐标。
4 结语
综上所述,农业应用植保无人机具有提高工作效率、减少农药和化肥使用量、提高作业质量、降低安全风险以及推动农业现代化等多个方面的作用。农业无人机植保作业全覆盖航线科学规划,需要根据地形特征和障碍物分析结果进行航线设计优化。为提升农业无人机植保作业全覆盖航线科学规划方法的实效,本文对作业区域划分、子作业区域规划、开放边界航线规划、障碍边界航线规划进行充分分析,提出了适用于不同边界类型的无人机植保作业全覆盖航线科学规划方法。