玫瑰扫描亚成像系统仿真研究
2023-07-31王成,孟晨,李青
王 成,孟 晨,李 青
(陆军工程大学石家庄校区导弹工程系,石家庄 050003)
0 引言
玫瑰扫描红外寻的技术是一种常见的便携式防空导弹红外自寻的技术,采用单元探测器用较小的瞬时视场获得较大的扫描视场,由于探测器尺寸较小,可以提高导引头系统灵敏度和空间分辨率,使得目标、干扰脉冲易于分离,提高了脉冲鉴别的能力。经典的目标探测与识别方式利用了玫瑰扫描产生的复杂脉冲波形的时序关系来实现,这种基于时间序列的分析对扫描系统的稳定性提出了很高的要求[1-2],因此,为了解决稳定性要求过高的问题,采用玫瑰扫描体制的导引头(例如美国的“毒刺”导弹),大多数都采用了亚成像技术,本文将在对玫瑰扫描数学原理分析基础上,完成玫瑰扫描亚成像的仿真验证[3-4]。
1 玫瑰扫描工作原理
1.1 玫瑰扫描光学系统
玫瑰扫描光学系统的工作机理是:利用两个向相反方向旋转的主次反射镜和偏心透过镜,对目标进行光学扫描,使其在红外焦平面上形成玫瑰扫描形状光斑,该光斑经过红外探测器时形成电脉冲信号,通过对电脉冲信号进行解算、跟踪和滤波处理,形成正比于视线角速度的导引信号,用于对导弹的制导控制。
为了便于理解,通常将玫瑰光斑经过探测器,经光电转换形成电脉冲这一过程进行反向描述。可以理解为探测器在进行玫瑰花扫描,每扫描到一次目标时会形成红外信息脉冲[5-6]。
玫瑰光学系统采用双反射镜式的卡塞格林系统,其结构如图1 所示,由主、次反射镜和偏心镜构成,安装在陀螺转子上的主、次反射镜通过陀螺控制电路以f1频率旋转;安装在无刷稳速直流电机上的偏心镜,由稳速电机驱动电路驱动,相对主、次反射镜以f2的频率反向旋转,形成玫瑰线扫描。同时将探测器整件引入了光学设计,在偏轴透镜后加入探测器整件,组成一套完整的光学结构。玫瑰扫描实现了小瞬时视场对物方较大视场范围内的扫描,保证了扫描视场半锥角为大于等于60'的要求,轴上物点由于满足等光程条件,可以理想成像,而对于轴外物点,由于视场较小,轴外点成像的像差可以控制在允许的工作范围内。
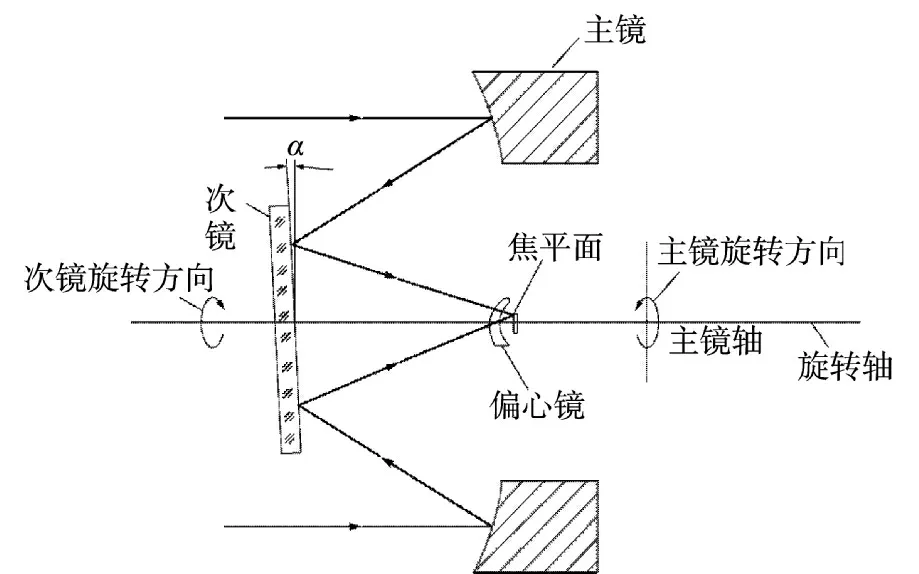
图1 光学系统结构图Fig.1 Optical system structure diagram
1.2 玫瑰扫描工作原理
目标成像光斑在探测器焦平面上呈现玫瑰扫描运动,当光斑经过探测器时,经过探测器的光电转换,形成脉冲信息。玫瑰线扫描图案为探测器瞬时视场中心在物理空间的扫描轨迹,玫瑰线的平面方程为:
其中,x、y 为目标位置的坐标,ρ 为玫瑰扫描的扫描半径,f1为主镜旋转频率,f2为偏心镜旋转频率。f1和f2决定了玫瑰扫描完成的速度和形状,包括花瓣的数量,花瓣交点的位置等。
设f 是f1和f2的最大公约数,则
当N1和N2都是正整数时,扫描形成一个闭合的玫瑰花图像。玫瑰花瓣数为:
为了仿真玫瑰扫描图案的动态生成过程,利用LabWindows/CVI 对其进行仿真,具体步骤如下:
Step 1:设置f1、f2、ρ 和采样参数;
Step 2:通过定时器参数设置,控制玫瑰扫描动态轨迹生成。
玫瑰扫描运动轨迹仿真结果如图2 所示。其中,图2(a)为玫瑰花瓣扫描未完成时的图形,图2(b)为玫瑰花瓣扫描完成后的图形。
为了进一步说明玫瑰扫描图案的区别,通过设置f1和f2仿真,可以看出花瓣的宽度随着ΔN=N1-N2的增大而增大,当ΔN<3 时花瓣间无重叠,得到玫瑰扫描花瓣无重叠的仿真结果如图3 所示。
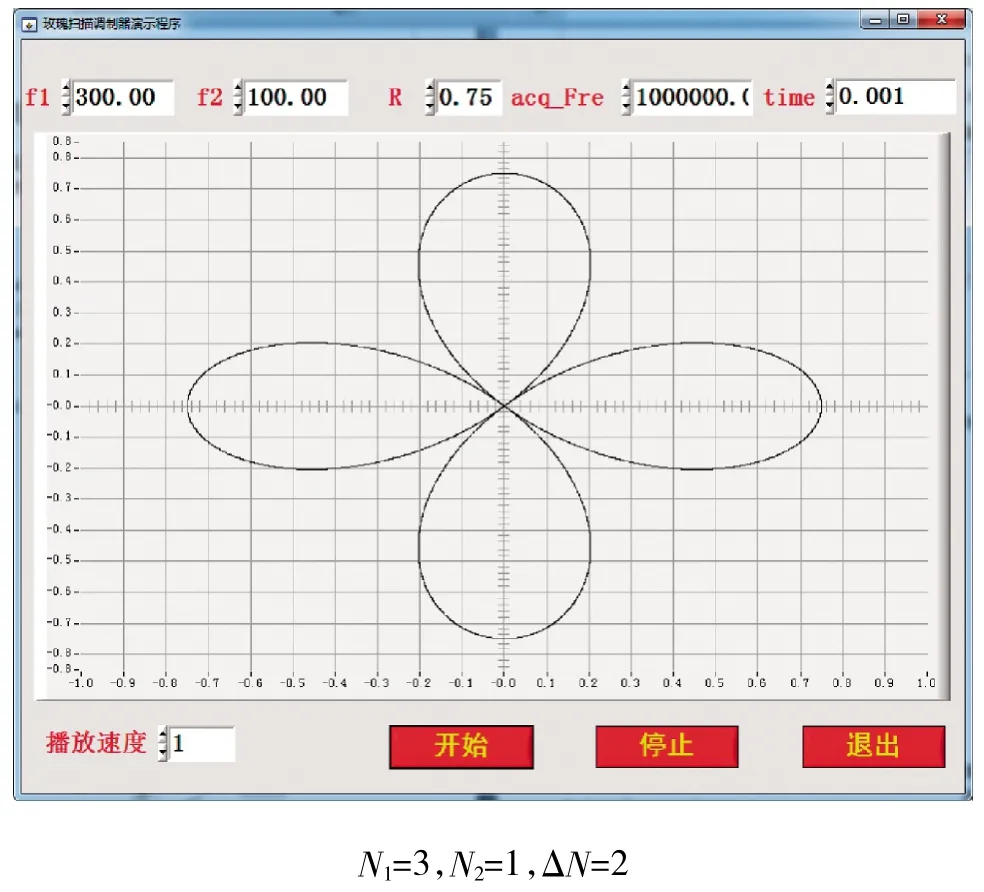
图3 玫瑰扫描花瓣无重叠的仿真结果Fig.3 Simulation results of the rose scanning petals without overlapping
1.3 玫瑰扫描目标探测工作原理
玫瑰扫描目标探测工作原理如图4 所示,其中,图4(a)为目标不在光轴上的情况,图4(b)为目标在光轴上的情况。当光学系统旋转时,光斑每次扫过探测器,探测器就从其前置放大器输出一个脉冲。为了便于叙述及理解,假设目标不动,探测器运动,当目标在光轴上,一帧时间内,光斑扫过探测器产生N(玫瑰花瓣数)个脉冲;当目标不在光轴,红外光斑扫过探测器后产生的脉冲少于N 个。
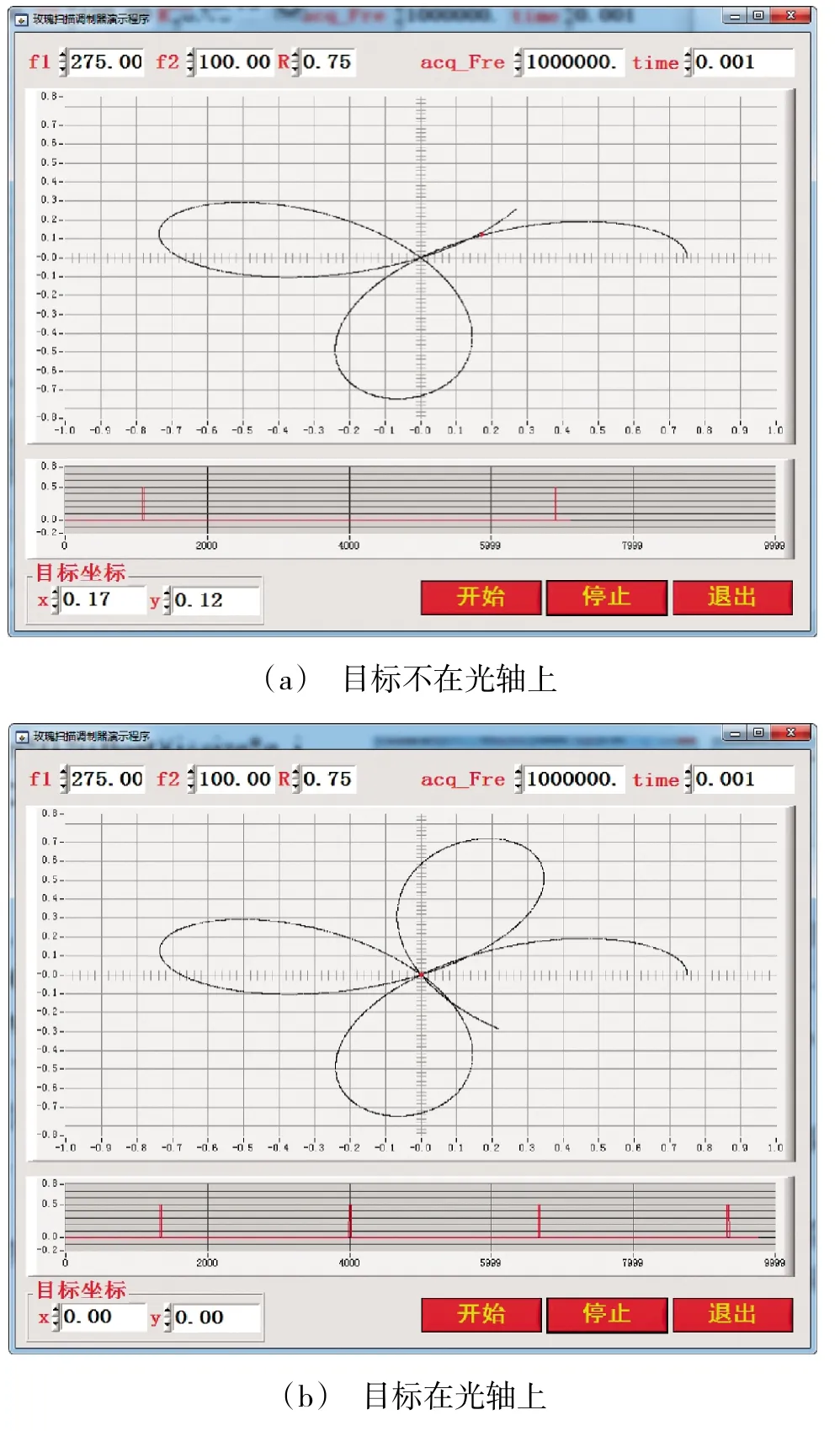
图4 光斑扫描与探测器脉冲输出Fig.4 Spot scanning and detector pulse output
通过仿真可以看出,玫瑰扫描具有以下几个特征:
1)玫瑰扫描产生的脉冲具有非周期性的特征,视场中的目标,其信号在时间轴上是不连续的,即非周期性,这是由于玫瑰扫描是一种跨象限扫描体制。
2)在玫瑰扫描视场中心区域,当一个目标位于某一位置时一帧中可以有多个脉冲出现。
3)在一个完整周期内,玫瑰扫描视场中心脉冲个数多,边缘视场脉冲个数少。
4)虽然有多个脉冲出现,但这些信号是可区分的。当目标位于扫描视场中心时,虽然目标位置在空间上重叠,但在时间坐标轴上是分离的,一帧中目标信号是依次出现的;当扫描视场中有多个目标出现时,只要空间位置不同,目标信号就不会重叠。
5)玫瑰扫描利用中心视场脉冲个数多,边缘视场脉冲个数少的特征,可以抑制边缘目标,提升目标跟踪的稳定性。但玫瑰扫描产生脉冲依赖于探测器与扫描轨迹线的相交数量,而其方程中扫描圆的频率会影响扫描脉冲个数,系统设计时需要考虑频率的匹配关系。
从理论上分析,通过解算目标脉冲与基准脉冲之间的时间差即可实现点源目标的探测。但是这种方法对于时间差的测量精度要求较高,而且误差较大,因此,实际上便携防空导弹通常采用玫瑰扫描亚成像技术进行目标探测与跟踪。
2 玫瑰扫描亚成像
玫瑰扫描亚成像技术的工作原理是:当玫瑰扫描轨迹积累一定的时间段后,可以绘制其红外能量分布图,即形成一幅玫瑰扫描亚成像图像[7],亚成像图像形成后,通过图像处理技术进行轮廓识别,取出多个能量块,再通过目标与干扰在图像上的位置形状分布、能量分布及有效脉冲分布等特性的差异提取出目标,得到真实目标的位置[8-9]。
为了对玫瑰扫描亚成像进行系统仿真,本文首先更换视角,将玫瑰扫描轨迹映射到目标空间,即认为探测器在空中做玫瑰花形状的扫描,然后将每一时刻扫描瞬时视场在整个视场中对应的坐标计算出来,并完成扫描,把扫描结果填到图像对应的坐标位置,当扫描完一帧后就形成一幅亚图像。
2.1 玫瑰扫描坐标映射关系
玫瑰扫描按时间获得的采样点实际上是一个灰度序列,可以理解为探测器在空间按照玫瑰花轨迹扫描,当扫描到目标时,探测器有脉冲输出,否则探测器无脉冲输出,为了简化,仿真时将探测器有脉冲输出定义为1,无脉冲输出定义为0。文献[10]给出了玫瑰扫描一维序列到二维空间的坐标映射方法,但是经分析该方法只适合玫瑰花瓣无重叠的情况,本文在此基础上对坐标映射关系算法进行改进。
假设玫瑰扫描花瓣总数为N,由于玫瑰扫描同一个花瓣扫描时间不连续,因此,需要将一个花瓣分为两部分进行处理,设在每半个花瓣上采样点个数为S,则可以将一维扫描序列转化为的矩阵,其中矩阵行代表的是花瓣的序号,列代表的是采样点在花瓣中的位置,本文提出“行扫描+列扫描”的方法确定玫瑰扫描坐标映射关系。
2.1.1 行扫描
通过前面的仿真知道,玫瑰花瓣的扫描顺序不是顺序形成的,第1 个花瓣的两个半花瓣是一头一尾扫描形成的,其余花瓣本身是按照时间顺序先后扫描形成的,但是花瓣间不是按照时间序列排序的,因此,花瓣的顺序难以用时间进行描述,本文在文献[10]的基础上进行改进,通过选择特定点计算极角的方法确定玫瑰花瓣的序号。
根据前面的玫瑰扫描直角坐标方程可以得到其极坐标方程如下:
对于花瓣间无重叠这种情况,定义逆时针方向为正,则行的序号R(i)为:
设f1=275,f2=225,则N1=11,N2=9,花瓣间无重叠,通过式(3)计算得到所有半个花瓣对应的行号结果如图5(a)所示。

图5 行扫描结果Fig.5 Line scanning results
设f1=275,f2=100,则N1=11,N2=4,花瓣间有重叠如图2(b)所示,直接利用上面公式计算可以发现半个花瓣中不同采样点计算得到的行号不一致,为此,可以看出如果选择花瓣与旁边花瓣交点远离中心的采样点则上面公式仍然适用,具体行扫描结果如图5(b)所示。行号标在具体计算极角的采样点位置上。
2.1.2 列扫描
定义玫瑰扫描花瓣中心为每个花瓣对应的第0 列,则根据玫瑰扫描的平面方程得到列的序号C(j)为:
对按照时间顺序的两行进行列扫描,仿真运行结果如下页图6 所示。
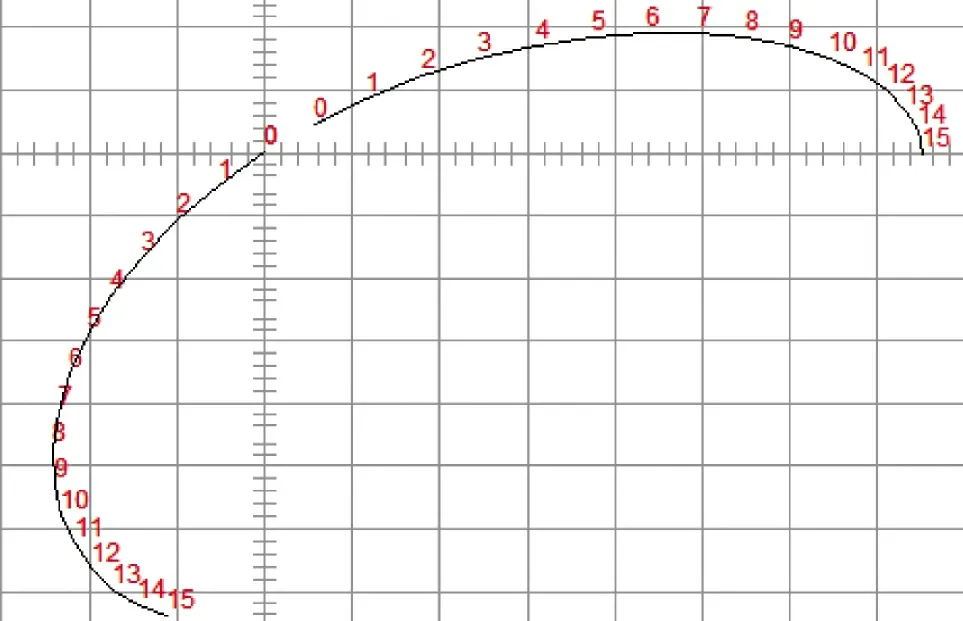
图6 列扫描结果Fig.6 Column scanning results
完成了行扫描和列扫描后,即建立了玫瑰扫描坐标映射关系矩阵。
2.2 玫瑰扫描生成二维数据
根据前面行扫描和列扫描的结果,一个扫描周期中的采样点可以依次映射到二维空间,形成二维矩阵数据。本文在LabWindows/CVI 下,利用CANVAS 控件进行绘制,得到的玫瑰扫描结果如图7 所示,图中黑色区域为视场中的真实目标,对其采用红色虚线所示的玫瑰扫描仿真运行后得到30×32矩阵(N=15,S=32)。
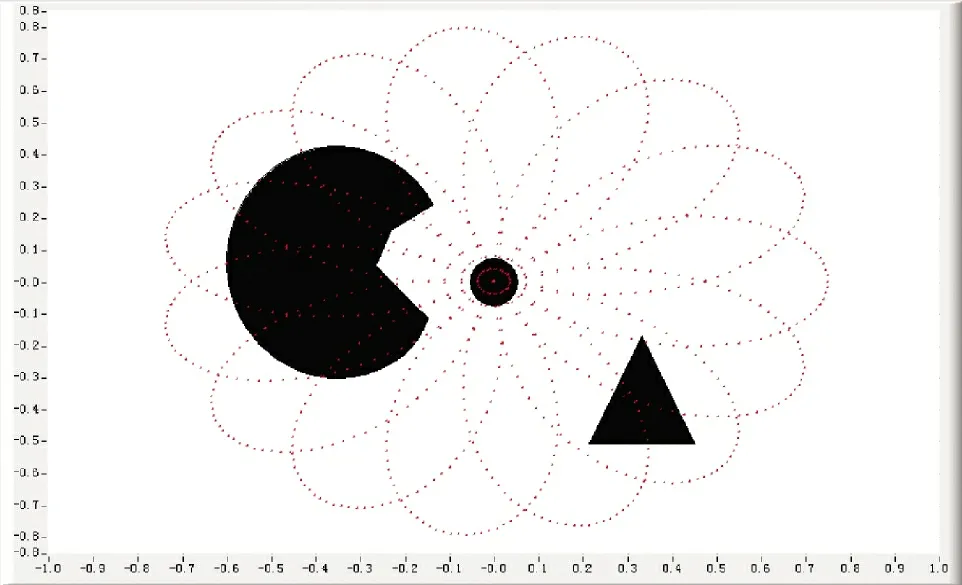
图7 视场中目标真实形状与玫瑰扫描仿真Fig.7 Real shape of the target in the field of view and rosette scanning simulation
为了更好地显示二维数据,本文开发了二维数据图形化显示工具,在CANVAS 控件上,将数据“1”绘制成黑色矩形,将数据“0”绘制成白色矩形,其显示图7 经过玫瑰扫描后得到的二维矩阵结果如图8所示。

图8 玫瑰扫描得到二维数据图形化显示结果Fig.8 Graphical display the results of 2D data obtained from the rosette scanning
图8 中黑色部分为图7 目标的二维显示,从图8 可以看出,视场中目标连通的图像区域经过玫瑰扫描后大部分仍能保持连通,而且原图像的边缘和内部关系保持不变,边界点的相对位置关系也是保持不变的。
2.3 玫瑰扫描亚成像仿真
在得到玫瑰扫描二维数据后,即可通过玫瑰扫描坐标映射关系矩阵进行目标亚图像的生成。本文对图8 生成的二维数据,利用玫瑰扫描坐标映射关系矩阵生成亚成像结果如图9 所示。

图9 玫瑰扫描亚成像仿真结果Fig.9 Rosette scanning sub-imaging simulation results
从亚成像仿真结果来看,如果视场空间中有多个目标,在亚成像后会对应不同的区域,可以采用图像处理算法进行图像分割来实现目标的分类。文献[10]中采用“K-means 聚类算法”实现图像的分割。本文为了简化,提出了基于图像连通区域的聚类算法。具体步骤如下:
Step 1:搜索二维矩阵中每行大于指定长度的连续的1 数据块,将其添加到区域块链表结构中;
Step 2:遍历所有的区域块链表元素,如果两个区域块的行相邻,且有相同列,则将这两个区域块合并;
Step 3:将合并的区域块,根据起点和终点所出位置进行排序,然后绘制轮廓线,实现图像聚类。
对图9 得到的亚成像结果进行聚类后仿真结果如下页图10 所示。
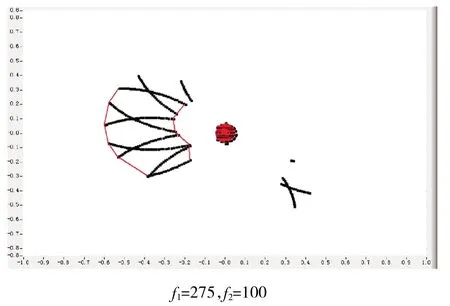
图10 玫瑰扫描亚成像结果分类整形仿真结果Fig.10 Rose scan subimaging results,classification,shaping,and simulation results
从图10 可以看出对于左边区域目标能够很好地实现聚类,对于右边区域目标,由于目标刚好落在玫瑰花瓣交点处,且这两个花瓣所处行不相邻,因此,不能实现聚类。
如果设玫瑰扫描参数为:f1=275,f2=225,则N1=11,N2=9,玫瑰花瓣间无重叠,仿真得到的玫瑰扫描亚成像,与原始图像对比效果如图11 所示,与图10 对比可以明显看出当玫瑰花瓣不重叠时,亚成像效果将得到极大改善。
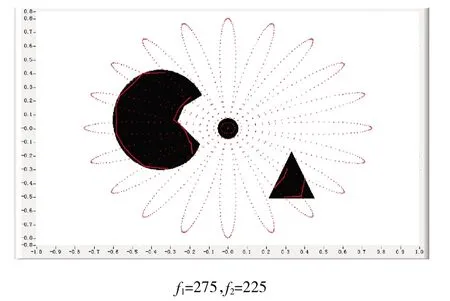
图11 玫瑰扫描亚成像结果与视场原图像仿真对比结果Fig.11 Rosette scanning sub-imaging results compared with the original image simulation results for the field of view
3 结论
本文介绍了玫瑰扫描的工作原理,在此基础上介绍了玫瑰扫描亚成像机制,建立了玫瑰扫描坐标映射关系,完成了玫瑰扫描二维数据的生成和显示,最后完成了玫瑰扫描亚成像系统仿真,并提出了基于图像连通区域的聚类算法,实现亚成像图像分类与整形。
