天玑机器人改良导航系统在脊柱内镜髓核摘除术中的应用
2023-07-31李军杰唐兰兰杨镇源邓强张彦军刘宴东
李军杰 唐兰兰 杨镇源 邓强 张彦军 刘宴东
1甘肃省中医院(兰州 730050);2甘肃中医药大学研究生院(兰州 730000)
经皮脊柱内镜髓核摘除术(percutaneous transforaminal endoscopic discectomy,PTED)作为脊柱内镜微创经典技术之一,早在1997 年由YENNG 等研发出第三代经皮内窥镜系统并广泛临床应用,从YESS 技术到TESSYS 技术的革新发展,脊柱内镜技术趋向成熟[1-2]。TESSYS 技术能够适用绝大多数颈、胸腰椎间盘突出的摘除,因创伤小、恢复快,同时采用局部麻醉方式等特点,受到广大患者及脊柱外科医生的青睐。然而,在PTED 技术开展初期具有较为陡峭的学习曲线,往往在术中增加辐射量、特别是穿刺角度和位置偏差、误伤重要脏器、神经或血管,从而出现严重并发症甚至带来灾难性后果,既往文献报道[3],同时延长了患者的俯卧和手术时间,增加了术中风险[4-7]。传统方式术中通常借助C 臂反复透视进行导引穿刺角度调整,经过2D 透视平面图,由脊柱外科医生大脑中绘构3D 结构空间解剖关系转换,到达穿刺靶点后再进行椎间孔区域成型,再连接光源、内镜系统后,实施椎间盘切除和神经根的镜下减压操作。PTED 技术中定位穿刺、椎间孔关节突精准成型及工作道通的快速安全置入是实施该项技术的关键核心步骤,但也是阻碍技术开展的难点[8-9]。近年来,随着各类外科导航技术的研发,导航技术在脊柱外科领域中应用,导航辅助可减少辐射量,缩短手术时间,提高手术安全性,降低初学医师的学习曲线,同时符合脊柱外科精准和安全的理念[10-12]。本脊柱外科手术机器人团队在2020 年6 月至2022 年8 月,完成天玑机器人改良二维导航辅助下PTED 手术操作32 例(改良导航组),与同期在C 臂引导下完成35 例PTED术,进行回顾性研究比较,现报告如下。
1 资料与方法
1.1 一般资料选取了甘肃省中医院腰椎间盘突出症患者,2020 年6 月至2022 年8 月入院接受经皮椎间孔内镜手术的67 例患者,根据是否接受机器人导航辅助分为改良导航组(n= 32)和C 臂透视组(n= 35),年龄21~77 岁,平均(47.4 ± 12.5)岁。病程3~49 个月,平均(20.4 ± 3.7)个月;纳入研究患者中男42 例,女25 例;腰椎间盘突出类型、病变腰椎节段等两组的一般资料均具有可比性(P>0.05),见表1。

表1 两组患者一般资料比较Tab.1 Comparison of general data of two groups of patients例
C 臂透视组为C 臂引导下PTED 术,改良导航组为天玑骨科机器人二维导航下PTED 术。术前对患者影像资料进行分析,按经典椎间孔脊柱内窥镜系统TESSYS 技术确定穿刺点,穿刺达到靶点位置为穿刺成功,并行椎间孔关节突成型。本研究方案通过医院伦理委员会审查,研究方案均告知患者及其家属,取得患者的知情同意。
病例纳入标准:(1)确诊为单节段腰椎间盘突出症,单侧下肢放射性疼痛、麻木伴或不伴腰痛,脊神经支配区域的皮肤感觉、肌力减退;(2)经CT及MRI 检查证实单节段的椎间盘退变突出,或髓核游离,神经根受压,并症状体征与影像学符合;(3)经过严格的3 个月以上的保守症状不缓解或症状加重者;(4)年龄>16 岁;(5)患者资料完整,同意纳入研究。
排除标准:(1)腰椎动力位X 线片,存在明显腰椎失稳或椎体滑移患者;(2)间歇性跛行或CT/MRI 影像学提示有严重腰椎管狭窄患者;(3)既往有腰椎手术需要再次接受手术患者;(4)合并脊柱感染或肿瘤患者;(5)伴有严重精神心理疾病、内科疾病,如糖尿病控制不佳,合并冠心病、慢性阻塞性肺炎等严重器质性病变不能耐受麻醉及手术者。
1.2 方法67 例患者均为同一治疗组手术医师主刀,所有患者均由专科护士配合完成手术。
1.2.1 器械及设备椎间孔镜系统使用德国原装进口SPINENDOS 椎间孔镜系统操作,德国西门子C 型臂透视,天玑®骨科手术机器人,一次性双极射频手术刀头(沪械注准20172250120)。
1.2.2 手术方法术前准备:所有患者完善腰椎X线、CT、MRI 检查或神经跟阻滞明确责任间隙;术前12 h 口服依托考昔120 mg 超前镇痛。
两组患者均采用基础麻醉(右美托咪定+舒芬太尼)+局部浸润麻醉(0.75% 利多卡因注射液)下行经皮椎间孔镜髓核摘除术(TESSYS 技术),患者取俯卧位,腹部悬空,保持髋关节和膝关节屈曲。手术操作区域内做好防水贴膜,沿患者脊突标记后正中线及髂棘线,透视确认责任椎间盘,C 臂透视组在C 型臂引导下设计手术穿刺路径并做标记,常规消毒铺巾;用0.75%利多卡因15~20 mL依次从穿刺点浸润麻醉,18G 穿刺针按TESSYS 技术要求徒手穿刺,穿刺针到达Kambin 安全三角区后,拔出针芯,置入导丝,沿穿刺点切开皮肤及筋膜约0.7 cm,依次置入导杆、逐级软组织扩张管,环锯保护套管,置入环锯,透视位置满意后椎间孔区域关节突成型,成型满意后,再置入铅笔芯和内镜工作外套管,再次透视定位,确认责任节段及位置无误开始髓核摘除及神经根减压手术步骤。
改良导航组:消毒铺巾及防水贴膜工作准备完成后,将示踪器在体表无菌条装贴膜交叉固定,启动C 臂采集带有“酒杯”标尺的腰椎A/P 位,完成天玑机器人连接及启动,机械臂、示踪器、卡尺的数据匹配,启动“天玑”自带创伤模块定位系统(即二维定位系统),并将采集数据上传天玑机器人主机,按照TESSYS 技术穿刺要求规划穿刺路径,即从腰椎侧位穿刺路径通过椎体关节突尖,到达下节后上角,通过上节突尖的正位到达下节终板正中点的椎间隙。运行机械臂向规划进针点运动,安装工作套筒,沿穿刺点0.75%利多卡因依次浸润麻醉,沿套筒经皮刺入导针,触及关节突骨皮质后快速旋转电置入导丝,术中C 臂透视验证位置及节段无误后,经穿刺点切开皮肤、筋膜约0.7 cm,沿导丝置入逐级扩张器、环锯保护套管、椎间孔成型,完成工作套筒的置入,再次透视验证通道位置无误后,开始髓核摘除手术步骤。镜下术野如有关节突成型不够满意时,镜下环锯进行2 次关节突成型。
1.3 术后处理患者术后平卧24~48 h 内,可在床上踝泵训练活动,直腿抬高下肢肌肉训练,监测生命体征。术后24~72 h 内常规予脱水,B 族维生素营养神经。术后48~72 h 后佩戴腰围下床活动,术后2 周后开始适当腰背肌康复训练,术后3、6 个月、1 年复查。术后随访,末次随访时间范围6~18 个月。
1.4 观察指标(1)VAS 评分及腰椎ODI 评分:应用视觉疼痛模拟评分法(visual analogue scale,VAS)评估患者疼痛程度(0~10 分)。术前、术后均对所有患者进行VAS 评分。腰椎ODI(Japanese orthopaedic association scores)评分:用于评价人体功能性障碍,数值介于0~29 分,分数越低表明功能障碍越明显,所有患者术前、术后3 d、1、3 个月、末次随访均进行ODI 评分。(2)手术情况:记录两组患者X 线透视次数,工作通道置入时间(包括完成椎间孔成型)、手术总时间。(3)两组患者采用改良MacNab 评分评估疗效,末次随访时间大于6 个月,末次随访时间范围9~18 个月。(4)两组患者手术并发症情况:术中脑脊液漏、感染、穿刺损伤重要脏器、神经根损伤等,记录两组患者术后住院时间;(5)两组技术学习曲线:分别将两组患者以横坐标为手术台次,纵坐标为透视次数、工作通道置入时间、手术总时间,描绘两组患者PTED 穿刺定位学习曲线。
1.5 统计学方法采用SPSS 22.0 软件进行统计学分析。计量资料(符合正态分布)采用均数±标准差表示,采用t检验;改良MacNab 评分等计数资料均应用 例(%)表示,计数资料采用χ2检验。以P<0.05 为差异有统计学意义。
2 结果
2.1 术中指标改良导航组透视次数、辐射量和工作通道置入时间、手术总时间均少于C 臂透视组(P<0.05),见表2。
表2 两组患者手术指标情况比较Tab.2 Comparison of surgical indicators between the two groups ±s

表2 两组患者手术指标情况比较Tab.2 Comparison of surgical indicators between the two groups ±s
指标透视次数(次)辐射剂量(mGy)工作通道置入时间(min)手术总时长(min)椎间孔成型情况(1 次/2 次成型,例)术后住院时间(d)改良导航组(n = 32)6.38 ± 0.55 84.11 ± 6.28 8.33 ± 3.41 62.13 ± 17.32 31/1 4.11 ± 0.40 C 臂透视组(n = 35)15.13 ± 2.32 183.42 ± 17.81 19.14 ± 6.75 97.61 ± 17.64 29/6 4.50 ± 1.60 χ2/t 值13.981-1.18 8.228 5.123 2.341-7.461 P 值0.021 0.017 0.001 0.031 0.671 0.341
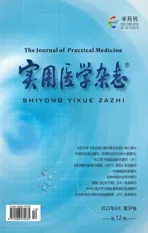
2.2 疼痛及腰椎功能改善指标两组患者VAS 评分较术前均降低,术前和术后差异均无统计学意义(P>0.05)。两组患者腰椎ODI 评分较术前改善(P<0.05),见表3。
表3 两组患者VAS 评分和ODI 评分情况比较Tab.3 Comparison of VAS score and ODI score between the two groups ±s,分
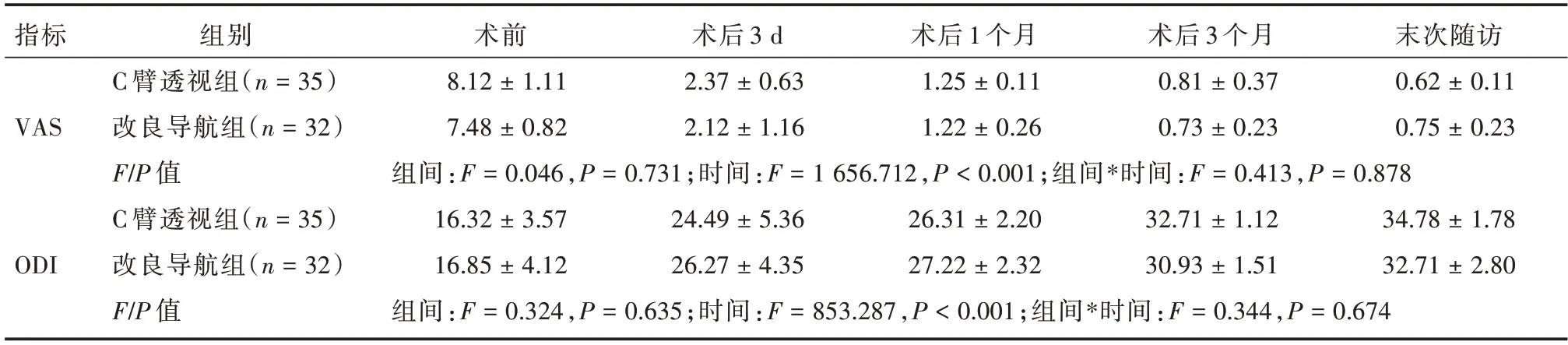
表3 两组患者VAS 评分和ODI 评分情况比较Tab.3 Comparison of VAS score and ODI score between the two groups ±s,分
指标VAS术前8.12 ± 1.11 7.48 ± 0.82组间:F = 0.046,P = 0.731;时间:F = 1 656.712,P<0.001;组间*时间:F = 0.413,P = 0.878 16.32 ± 3.57 16.85 ± 4.12组间:F = 0.324,P = 0.635;时间:F = 853.287,P<0.001;组间*时间:F = 0.344,P = 0.674组别C 臂透视组(n = 35)改良导航组(n = 32)F/P 值C 臂透视组(n = 35)改良导航组(n = 32)F/P 值术后3 d 2.37 ± 0.63 2.12 ± 1.16术后1 个月1.25 ± 0.11 1.22 ± 0.26术后3 个月0.81 ± 0.37 0.73 ± 0.23末次随访0.62 ± 0.11 0.75 ± 0.23 ODI 24.49 ± 5.36 26.27 ± 4.35 26.31 ± 2.20 27.22 ± 2.32 32.71 ± 1.12 30.93 ± 1.51 34.78 ± 1.78 32.71 ± 2.80
2.3 两组患者疗效两组术后末次随访时改良MacNab 评分比较,两组患者在术后末次随访时优良率,改良导航组为96.87%与C臂透视组的94.28%比较差异无统计学意义(χ2= 0.452,P= 0.889)。见表4。

表4 两组患者术后末次随访改良MacNab 评分比较Tab.4 Comparison of modified MacNab scores between the two groups at the last follow-up 例(%)
2.4 两组手术操作学习曲线天玑骨科机器人导航定位方法的学习曲线较传统方法低平,随患者例数的增加,工作通道置入时间、手术总时间及透视次数呈递减趋势,而C 臂透视组的总穿刺定位时间虽有随穿刺次数减少而下降的趋势,但存在明显波动(图1)。
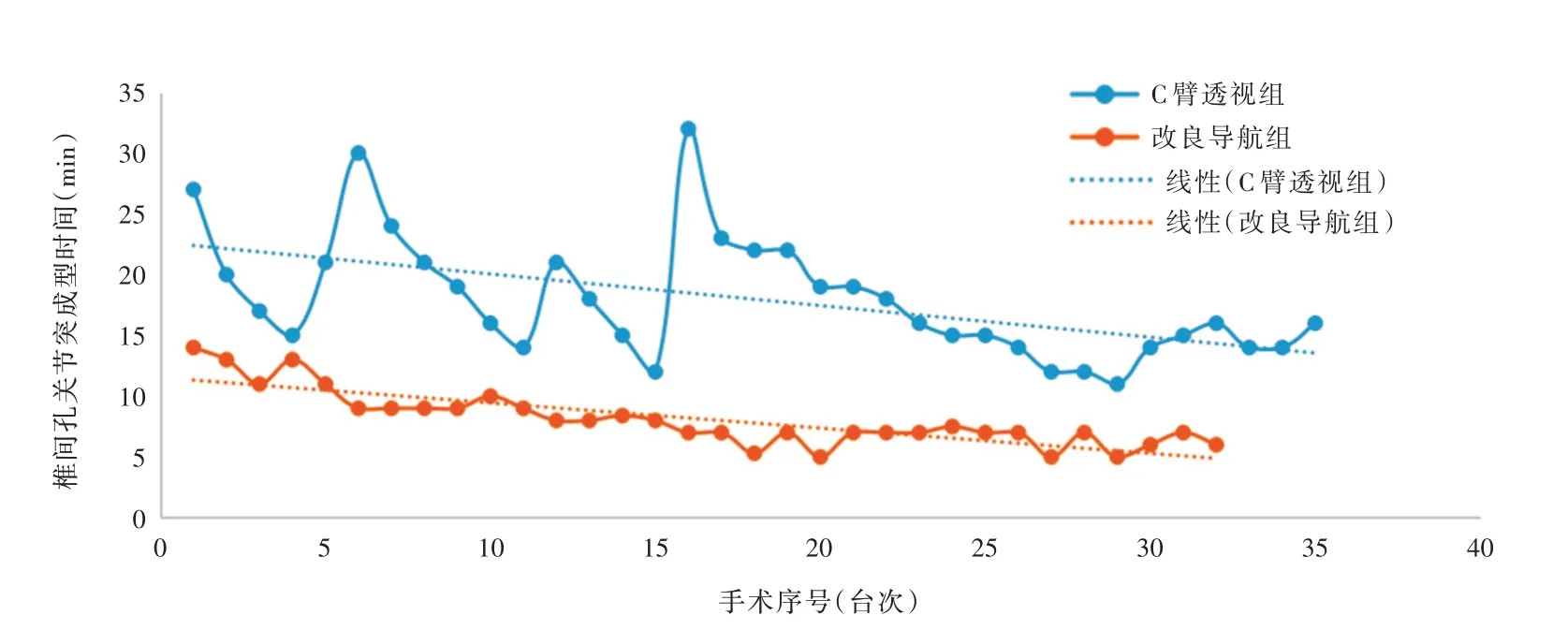
图1 两组患者不同椎间孔成型方法的学习曲线Fig.1 Learning curve of two groups of patients with different foraminal molding methods
2.5 不良并发症及随访两组患者术中及术后均无感染、穿刺损伤重要脏器、神经根损伤、脑脊液漏等严重并发症发生,发生率差异均无统计学意义(P>0.05);C 臂透视组1 例患者神经根水肿加重,术后疼痛加重,予脱水消肿、非甾体口服药物对症处理后48 h 疼痛消失;C 臂透视组1 例患者术中出现类脊髓高压综合征,表现症状颈项部疼痛,予调整手术至头高脚低体位,降低水压后症状缓解,术后严密观察无特殊不适。以上患者3 个月随访均无不适症状及体征。典型病 例(图2)。
图2 典型手术病 例(改良导航组)Fig.2 Typical surgical cases(Tianji robot navigation group)
3 讨论
PTED 经大量的临床实践证明,该术式不仅保留人体脊柱稳定性骨性及肌肉结构,更有利于术后神经恢复,有切口小、出血少、安全性高等特点,有效促进患者的快速康复[13],然而,在TESSYS 具有陡峭的学习曲线,椎间孔区穿刺及成型是核心技术步骤,但常依赖于外科医生的临床经验[2,14],在传统PTED 术中,通过反复X 线透视以对椎间孔局部解剖空间结构的熟练掌握及转换能力。尤其在缺少脊柱内镜技术经验的医生,不得不多次辐射曝光引导穿刺及关节突成型,尽管一定程度上降低了手术风险,但辐射损伤的风险仍不可忽视,初学医生或因术中判断不足,在关节突成型时去除骨质不足直接导致内镜下视野受限,从而影响神经根减压,或过多破坏关节突骨质,继发医源性腰椎失稳,甚至手术操作直接导致神经损伤、重要脏器损伤等严重并发症[15-17]。如何在术中减少辐射,提高手术安全及效率,降低学习曲线是开展该技术需要探索及克服的难题。
随着人工智能导航技术在临床的应用日益广泛,目前已有研究,机器人导航技术在人工膝关节置换、寰枢椎手术、骨盆创伤等骨科手术开展应用[18-21]。SOLIMAN 等[20]研究报道的机器人机械手操作代替术者徒手操作,提高了操作的稳定性和准确性,降低了成本和提高手术效率,有利于患者和脊柱外科医师。但针对脊柱手术导航三维导航,常应用在脊柱椎弓根螺钉、骶髂螺钉置入等术式场景中应用,天玑骨科机器人三维导航技术需要术中C 臂采集256 次曝光,尽管收集了三维数据图象,但这并未有效减少患者及医护人员的术中辐射量。故笔者在本研究中将天玑机器人改良二位导航系统创新性应用在脊柱微创内镜术中,借鉴TESSYS 技术常规C 臂平面X 线片位点,通过二维规划导航路径,从而实现了穿刺、成型的精准和安全。与传统“三维脊柱导航”机器人辅助技术比较,改良导航技术将术中数据实时采集的256 次辐射曝光降低为2 次,显著减少了术中辐射量。同时,简化了手术操作步骤,在数据采集并上传成功后,在计算机主机上规划简单,精准安全完成椎间孔区域成型及通道的置入。改良导航系统可实现在导航穿刺标尺所在位置的X 线正侧位图像,通过规划后运行机械臂直至穿刺到标准的穿刺靶点,减少了初学脊柱内镜医生临床经验及空间想象力对PTED 穿刺定位的限制,降低了传统穿刺凭靠手感及经验影响。此外,使用示踪器体表固定法,改良既往切开皮肤后夹持棘突固定,有效避免了皮肤切口显露创伤[22]。既往报道,电磁导航技术应用于脊柱内镜术中,但若患者体内有铁金属材质,导航精度受到影响,而改良二维导航技术不会受到此类因素的影响[23]。
本研究表明,与传统C 臂透视方法相比,导航的运用显著降低PTED 的学习曲线、缩短手术时间,提高手术安全性,且手术稳定性良好,恒定的穿刺定位时间和较小的波动,而传统定位方法虽有下降趋势,但波动明显;改良导航组的透视次数与时间,穿刺次数与时间,穿刺定位总时间均少于C 臂透视组(P<0.05),实现了安全、精确的减压,这与已报道的文献大致相符[24-26]。本研究纳入研究患者,通过6~30 个月,平均21 个月的随访,未发现复发及翻修的病例,总体改良MacNab 评分优良率达到95.5%,与文献报道大致相当[27],末次随访评分显著降低,早中期疗效满意。
天玑骨科手术机器人辅助下PTED 降低内镜手术初学者的学习曲线,解决了术者反复穿刺的弊端。但机器人导航的术前准备仍较为繁琐,包括机器人调试、摆放和机器人无菌区的建立和保护[28]。改良天玑机器人导航技术,本身作为一项新型技术,仍有一定学习曲线,需要做到“人机”完美配合。术中患者示踪器的绝对位置不能发生位移,否则各种对应参数发生变化,导致定位角度和穿刺点出现偏差,这是造成机器人定位偏差的主要原因[29]。需警惕手术机器人安全漏洞,术中关键节点需要医生亲自把关,尤其在技术开展的早期,术中关键的步骤进行X 线透视验证安全性,如果不能及时发现并纠正,将导致发生严重的医疗事故和纠纷[30-31]。以笔者的经验,在骨科机器人导航辅助腰椎间孔镜穿刺定位时,需要患者保持在相对固定的位置,尤其患者为局麻清醒状态下手术,在术前及术中需与患者做好沟通交流,保证体位的稳定,此外,在导针的置入时,不能受到皮肤牵拉等因素影响,否则引起导针飘移发生误差,导针在触及关节突骨面时,或导针突破较为坚韧且有阻力椎间孔区黄韧带后再到骨皮质,应注重“手感”,如导针在术前MRI 测量深度后,仍无骨性结构阻挡,应立刻停止穿刺透视,不可过度依赖导航,谨防穿刺偏差后发生严重并发症。
但本研究存在局限性:本研究为回顾性研究,纳入的病例数较少,临床随访时间较短,研究结果可能存在偏倚,今后需多中心、前瞻性对照研究,进一步评估改良天玑二维导航技术的优势和不足。
综上所述,应用天玑骨科机器人改良二维导航系统椎间孔镜下腰椎间盘髓核摘除术,可进一步减少创伤,规划等,全程可控性操作,简化手术步骤,减少了人为失误,有效减少TESSYS 的穿刺和透视次数,缩短手术时间,减少长时间俯卧产生的不适及穿刺过程的痛苦,减少医患人员辐射暴露剂量,并降低脊柱内镜的学习曲线,平均21 个月随访结果满意,是值得在临床应用和推广一项技术,可能将会进一步发挥脊柱微创外科手术数字化、智能化优势,造福患者。