便携式潜水助推器推进系统设计方法
2023-07-29赵燕来李翰林乔冠彰
白 杰,赵燕来,李翰林,乔冠彰
(长安大学道路施工技术与装备教育部重点实验室,陕西 西安 710064)
1 引言
潜水助推器(Diver Propulsion Vehicle,DPV)是人员在潜行过程中采用的动力装备,因其可以提供一定推力,节省潜水者体力消耗,增加航程,所以备受研究人员关注。
Farallon 公司为美军提供了多种型号的助推器,如MK-8,最大航速2.8kn,航程5km,下潜深度达40m。而STIDD公司生产的大型蛙人输运装置(Diver Propulsion Device,DPD),因其推力更大,航程更远,可携带两个以上蛙人,成为目前应用最广泛的水下移动平台。
针对蛙人推进装置的研制,学者们开展了大量的研究工作。曾钕钋[1]分析了水下推进器的主要关键技术,开发出一种蛙人用水下推进器。王帅[2]对蛙人运载装备进行了分析,介绍了水下助推器的技术发展。钟宏伟[3]分析了水面水下两栖蛙人输送艇的发展现状。M. R. Sadeghizadeh[4]采用数值仿真方法对蛙人运载器外形进行了优化设计,提高了航速。刘宁[5]对蛙人装备研究现状及发展进行了阐述,给出了国外典型运载器的技术指标。张建军[6]对蛙人推进装置进行了建模,并通过仿真分析对推进器位置进行了优化。李晗生[7]对潜水员驾驶DPV的水下航行过程进行了数值模拟,并开展了水池直航试验进行了验证。
近年来,随着潜水作业、水下娱乐等活动的增多,便携式潜水助推器需求增加,民用领域水下助推器飞速发展,但各类产品设计方法、设计参数和体验度差异较大。若采用军转民的技术路线,则存在性能过剩、能耗过大的问题。由于其外形轻巧、携带能源受限,需要设计小型、大推力、高效率的推进器,具有一定的设计难度,目前尚无统一方法。
目前,潜水助推器均采用电机带动螺旋桨推进的方案,因而设计与助推器匹配且高效率的螺旋桨推进系统成为了设计的关键。
目前研究人员多采用小型无人潜航器(Autonomous Underwater Vehicle,AUV)和小型水下机器人螺旋桨的设计方法进行选型设计。对于螺旋桨的设计与分析,国内外学者通过图谱法、实验法、仿真法做了大量的研究工作。Benedetto Allotta[8]等人采用图谱法设计了AUV螺旋桨推进系统。陈原[9]等对水下机器人导管螺旋桨敞水性能进行了研究。胡健[10]等对加速导管和减速导管的性能进行了比较。张若初[11]等对AUV用螺旋桨进行了数值设计并开展湖试验证。李龙[12]等采用升力线理论进行了AUV二叶螺旋桨设计,Jin Gu Kang[13]等研究了螺旋桨叶稍斜度对推进性能的影响。
虽然有关螺旋桨设计的成果较为丰富,但是针对潜水助推器动力系统设计的研究尚无报道。尽管采用计算流体力学方法对螺旋桨进行设计具有时效性、经济性等优势,但流体仿真计算适合对确定尺寸的螺旋桨进行优化设计,不适合推进器大范围选型设计。
本文从推进系统机桨匹配规律出发,提出一种适合便携式潜水助推器推进器选型设计的方法,对潜水装备发展有着重要意义。
2 推进系统建模
2.1 阻力计算模型
对于设计工况,潜水者匀速运动,螺旋桨推力与潜水者及助推器的总阻力相等,而总阻力及螺旋桨推力均与航速密切相关。因此,需首先获得总阻力与航速的关系。
目前,为获得潜水员的阻力,刘宁等[14]通过计算人体沾湿面积后采用公式法预测,李晗生等[15]采用数值仿真的方法进行预报。由于采用公式法存在误差,采用数值仿真法对建模、计算要求较高,不适合大范围选型设计,因此采用中山大学水池试验的结果,获得单人在水中阻力与航速的关系[16],如表1。
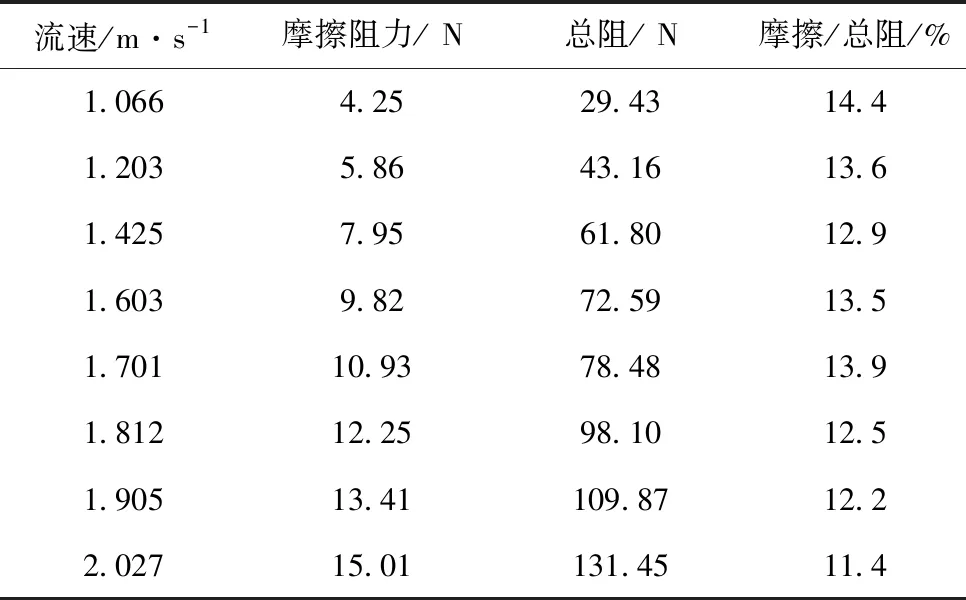
表1 中山大学水池实验所得数据
通过数据分析,在一定范围内,单人在水中阻力Fpep与航速v的关系可以表示为
Fpep=57.15v2-77.07v+50.13
(1)
人员携带潜水助推器后总阻力Ftotal为
Ftotal=(1+k)Fpep
(2)
式中:k为推进器阻力因数。
2.2 螺旋桨模型
对于采用螺旋桨推进的系统,螺旋桨的进速系数J为
(3)
式中:vp为螺旋桨在敞水中轴线速度,n为螺旋桨转速,D为螺旋桨直径。
vp=v(1-w)
(4)
v为航速,w为伴流因数,反应了航行速度与螺旋桨在敞水中的速度差。
螺旋桨推力F
F=KFρn2D4
(5)
式中:KF为推力系数;
螺旋桨转矩M
M=KMρn2D5
(6)
式中:KM为转矩系数;
计算推力系数和力矩系数回归多项式为
KF=∑∑AijaiJj
(7)
KM=∑∑BijaiJj
(8)
式中:Aij、Bij可以根据不同的螺旋桨桨型,通过查螺旋桨系列试验图谱获得。螺距比a为
a=L/D
(9)
式中:L为螺旋桨螺距。
螺旋桨的推进效率
(10)
3 推进系统设计
3.1 设计方法
由式(3)、(7)可知螺旋桨的推力F是a,v,n,D的函数,满足
F=f1(a,v,n,D)
(11)
同理,由式(3)、(8)可知螺旋桨的转矩M是a,v,n,D的函数,满足
M=f2(a,v,n,D)
(12)
当a、v一定时,F、M为n,D的二元函数。
对于潜水助推器的推进功率P为
P=Fv
(13)
航程s为
s=vt
(14)
式中:t为航时。
在潜水助推器设计时,潜行航速对系统影响最大。根据式(1)、(13),航速越大,需要功率越大,增加航速,会造成总航程减小。
根据式(2)、(11),可以改变螺旋桨转速、直径、航行器航速,计算螺旋桨推力和航行器阻力,比较推进效率,确定设计工况和结构参数。
综上所述,可通过仿真技术进行推力和阻力匹配计算,以确定设计参数,提高设计效率。
3.2 设计条件
以民用领域便携式潜水助推器为设计背景开展研究,应当以结构轻便,兼具良好的推进性能为设计目标。电池可采用比能量较高的锂电池,但由于结构尺寸限制,电池总容量受限,不宜追求过大推力以获得更高的航速,否则将减少使用时间。目前,人体百米游泳最大速度约2m/s,为平衡航速与使用时间的关系,以v=1.5m/s作为设计工况较佳。
导管螺旋桨因结构简单、安装方便,推进效率高等特点,在现代船舶和航海领域有广泛的应用。本文采用JD7704导管与Ka4-55螺旋桨组合进行设计,利用图谱法对导管桨水动力性能进行计算。当潜水深度较小时,水压较低,需控制螺旋桨转速以避免产生空泡,造成螺旋桨推力性能减弱。因此取螺旋桨转速30 r/s ≤≤65 r/s。
螺旋桨直径制约整机设计尺寸,为方便携带与使用,选取0.06m ≤≤0.12m。
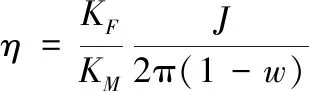
取螺距比a=1.4,由式(3)~(7)绘制导管螺旋桨正车敞水特性曲线,如图1所示。由图可知,随着进速系数的增加,螺旋桨推力系数和转矩系数逐渐减小,推进效率先增大后减小。
图1 JD7704+Ka4-55导管螺旋桨正车敞水特性曲线
3.3 方法对比
为验证设计方法及其优势,对JD7704导管与Ka4-55螺旋桨进行建模,利用CFD软件开展水动力性能数值仿真。采用结构化网格,外静止域设置速度入口、压力出口,边界条件为固定壁面,无滑移,螺旋桨旋转域采用MRF方法。取v=1.5m/s,D=0.08 m;改变转速,计算均匀轴向来流时五种工况下的推力系数和转矩系数,与图谱法进行对比,如图2 所示。

图2 图谱法与数值仿真法计算结果对比
从计算结果可见,两种方法计算的误差在12%以内,均可作为螺旋桨设计的方法。但是采用数值计算方法建模和仿真时间长,改变结构参数后,需要重新修改模型,不适合在大范围选型设计阶段使用。因此,采用本文设计方法,能够快捷、准确地给出适合的设计方案,显示出该方法的优势。
3.4 性能计算与分析
基于图谱设计理论,采用本文提出的方法进行选型设计。改变导管螺旋桨的直径和转速,其推力和转矩变化规律如图3所示。当转速一定,推力和转矩随螺旋桨直径的增大而增大。当螺旋桨直径不变,推力和转矩亦随转速的增加而增大。且当转速大于50 r/s,直径大于0.08m时,推力和转矩的梯度增大,变化剧烈。
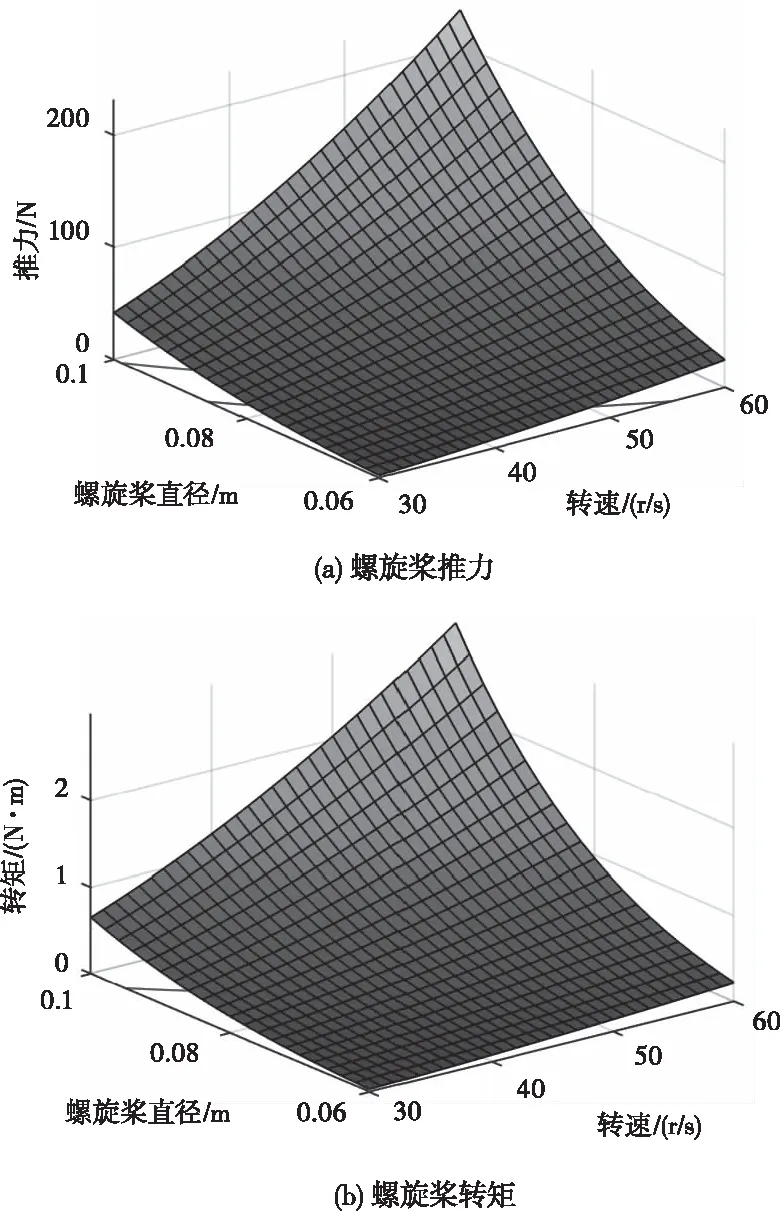
图3 螺旋桨推力和转矩变化规律
改变导管螺旋桨的直径和转速,其轴功率和推进效率变化规律如图4所示。推进器的轴功率随螺旋桨直径和转速的增大而增大,且梯度逐渐增大,呈现出与推力和转矩相似的变化规律。而螺旋桨的推进效率则出现先增大后减小的规律,当转速大于50 r/s,直径大于0.08m时,推进效率变化显著。
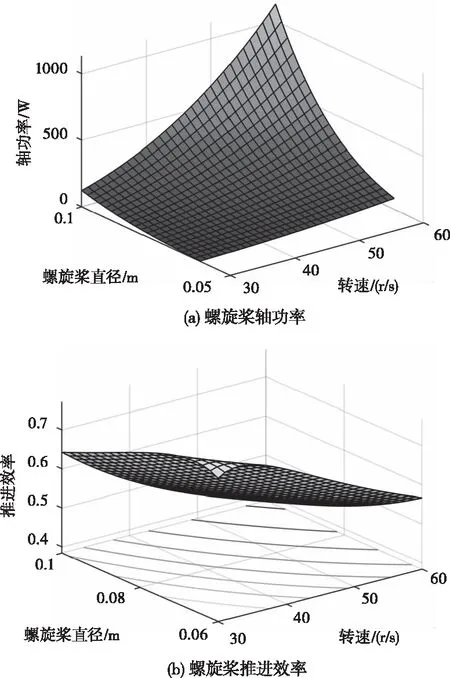
图4 螺旋桨轴功率和推进效率变化规律
由设计航速v=1.5m/s,根据式(1)计算单人潜水需要推进器提供的推力为76 N。
根据各性能参数随螺旋桨直径和转速的变化规律,为采用较高推进效率的设计方案,由图4 (b)可知,在所选参数变化区间内,应避免采用转速和直径同时较大的设计方案,而在保证所需推力的前提下,尽量向效率较高点选取,同时应当校核螺旋桨是否出现空化。
基于上述设计思想,潜水助推器的设计方案如表2。为满足设计航速下推力,可采用单螺旋桨或双螺旋桨方案,但采用单螺旋桨推进器,螺旋桨直径较大,且推进效率不高。对于民用场景,将影响整体产品的尺寸,不便于携带。而采用双螺旋桨设计,单个推进器直径的直径可以减小,效率可以增大,电池总能一定情况下使用时间较长。
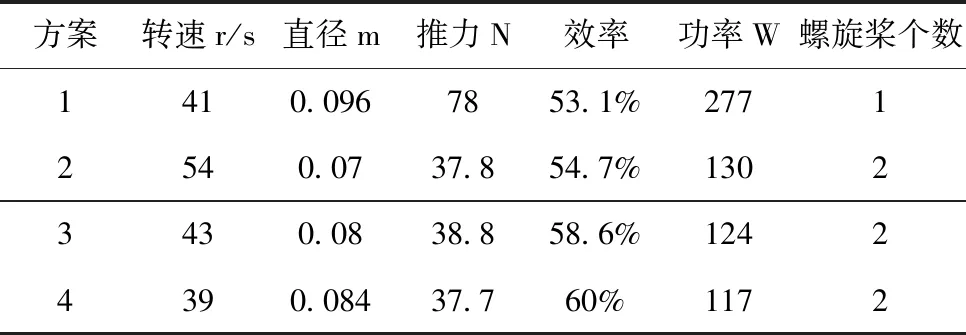
表2 部分设计方案
通过改变螺旋桨个数、直径和转速,匹配所需推力,可以获得多种设计方案,最终选定方案4较好。其采用双螺旋桨设计,兼顾了外形尺寸的限制,推进效率高,经校核后表明螺旋桨不会发生空化,能够保证有效的推进性能。
在选定螺旋桨的设计参数后,根据设计工况选配电机和电池,进而完成助推器的电控和结构设计,在此不再赘述。
4 结论及展望
潜水助推器由最初的军事应用扩展到各种商业用途,近年来发展迅速,本文针对助推器推进性能的关键问题进行分析,为其选型设计提供参考。
1)提出了一种便携式潜水助推器推进系统设计方法。该方法采用螺旋桨图谱设计为基础,可获得推力性能变化规律,用于不同工况下系统的选型设计。
2)给出了便携式潜水助推器推进系统的设计方案。该方案采用双螺旋桨设计,总推力76 N,预估推进效率60%,能够兼顾高效、轻便的设计需求。
尽管图谱法为助推器设计提供了一条简洁、快速的技术路线,但在初步选定几种方案后,可采用仿真技术进行验证,最后进行螺旋桨性能试验。将图谱法-仿真法-试验法进行有机结合,将是未来潜水助推器动力系统的有效设计手段。
此外,研究潜水时携带助推器的水动力学特性,获得不同工况、姿态下的阻力性能,对完善助推器的设计有重要价值。
