基于包络约束的幅相联合净空测量方法
2023-07-29邓佳欣马丁峰徐云山
邓佳欣,马丁峰,徐云山
(1. 中国飞行试验研究院,陕西 西安 710089;2. 中国人民解放军95966部队,黑龙江 哈尔滨 150060)
1 引言
由于国家十四五期间大力倡导低碳能源政策,因此大量用户会进一步加大新能源(风能和光伏发电)的投入力度,并结合微电网综合管理系统在用电的高峰和低谷期尽可能与传统能源行业协同工作,为低碳环保做出贡献。其中风力发电机由于其峰值发电功率的不断提升,其风机的规模会越来越大,塔筒和叶片均达到了近百米量级,因此相应的也存在了运行过程当中的潜在风险。根据用户对大型风力发电机机组运行过程中的安全监控需求,需要高精度监测叶片在高速旋转过程中与风机塔筒之间的水平距离,评估叶片扫塔概率,在发生紧急状况之前给后台提供预警信息,以防安全事故的发生。
为了得到叶片在风机坐标系下的实时三维坐标,需要采用雷达监控设备获取目标的三坐标信息,从而精确测量目标的径向距离、方位角、俯仰角信息。文献[1]介绍了三坐标雷达系统的发展历程,其相对于两坐标雷达,具有更强的目标观测能力。文献[2,3]分别介绍了俄罗斯和荷兰比较成熟的三坐标雷达系统,并对其雷达性能进行了全面的分析。文献[4-10]分别从三坐标雷达系统设计、扫描体制、多维跟踪以及目标连续观测的高度闪烁等层面提供了不同的解决方案,为三坐标雷达的检测、跟踪及测高等提供了技术途径,为后续的雷达系统提供了大量借鉴思路。
对于风力发电机的叶片净空测量系统,由于叶片下半段与塔筒之间的净空测量受方位维测量的影响较小,其测量误差对于70-100米叶片的精度损失在0.2米量级,因此可以借助分时和波束技术实现方位维测量的粗估计[11,12]。然而俯仰方向的角度测量精度对叶片净空的估计精度影响非常大,对于70-100米叶片的净空估计精度,1度对应的估计偏差达到了1米量级,因此必须对俯仰向进行高精度测角。文献[13-16]从多个角度提供了干涉测角的测量方法。文献[13]从雷达干涉仪的测量误差、基线影响、测角模糊以及测量精度等多个角度对干涉仪雷达系统进行了比较全面的分析。文献[14]提出了一种可以应用于可全方位同时探测的米波雷达天线及相应的测角算法,天线尺寸小、结构简单。文献[15]提出了一种新的干涉测角数据处理算法,该算法对相位干涉仪测角中因相位解模糊出错产生的错误角度值进行野值剔除,并引入2阶修正卡尔曼滤波器对剔除野值之后的角度信息进行平滑修正,保证了稳定跟踪的连续性。文献[16]提出了一种利用空间谱估计对干涉测角系统进行解算的方法,该方法在多重信号分类(MUSIC)算法的基础上,对协方差矩阵的估计、特征值分解、谱峰搜索等计算量较大的步骤进行了改进,提高了运算速度以及解模糊的正确率,但上述方法对系统的通道自由度和一致性要求较高。文献[17]针对多基线相位干涉仪的相位模糊问题,提出了一种基于参差基线解模糊算法原理的改进解模糊算法,该算法具有计算量小、实时计算以及正确概率高的优点。
本文在充分借鉴上述文献思想的基础上,从风机叶片净空估计的实际应用背景出发,充分考虑工程可实现性、空间约束、稳定性以及运算复杂度几个方面,在双接收通道雷达观测的条件下提出了基于边缘约束的幅相联合约束叶片净空测量方法。本文的结构如下:第二节简单介绍了连续波雷达的信息体制以及风机叶片观测的物理模型;第三节则主要介绍了所提方法的主要思想;第四节描述了算法实现的具体步骤;第五节通过连续波雷达实际采集的叶片观测数据验证所提方法在有多径扰动和震动引起的杂波环境扰动下的叶片识别及净空估计效果;最后一节总结了本文所提方法的优势及其工程价值。
2 信号模型
由于观测场景覆盖范围较小,且对于雷达系统的成本控制严格,因此叶片净空测量系统采用了线性调频连续波雷达。利用线性调频连续波的解线频调技术能够大幅降低接收系统的带宽,以较低的采样率录取回波数据,同时由于采用了连续波体制,雷达峰值功率可以大幅降低。雷达的发射信号波形如下所示
s(t,tm)=a(t)e(j2πfct+jπγt2)
(1)
其中t和tm分别代表雷达系统的全时间和慢时间,a(t)为发射信号的包络,一般在发射信号带宽内,该包络引起的幅度变化不会超过3dB,可以忽略不计。fc为雷达系统的中心频率,γ为线性调频信号的调频率。
对于风机的叶片净空测量,采用如图1所示的地面雷达测量方式。其中以叶片机舱平面与塔筒轴线分别为Y0轴和Z0轴,并根据右手原则确定初始坐标系的X0轴。而地面雷达的坐标系对应的坐标系分别为X1轴、Y1轴和Z1轴,两个坐标系之间的关系由现场的实际安装环境决定。
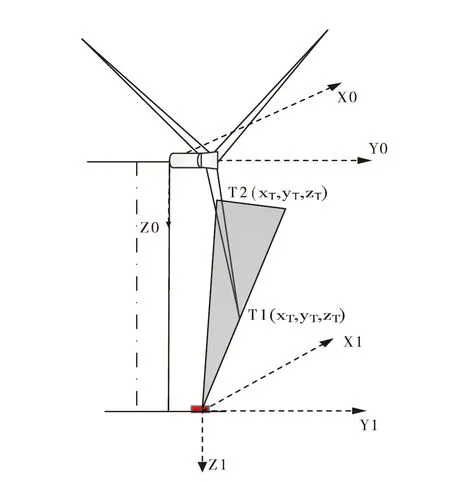
图1 风机叶片净空测量场景示意图
T1和T2分别为雷达波束范围内照射到的叶片最近端和最远端,其相对于雷达的距离分别为R1和R2。假定雷达发射的信号带宽为B,考虑到距离向加窗的影响,其距离向分辨率ρr为
(2)
其中c为电磁波的传播速度,α为加窗扩展系数。则叶片沿着雷达径向方向按照距离分辨率可以划分成如下离散的散射点集
Ri=Ri+(i-1)ρr,i∈[1,2,…,L]
(3)
其中
(4)
ceil()为向上取整函数。对叶片的回波进行解线频调处理之后,其回波形式如下所示

(5)
其中
(6)
(7)
τi=2Ri/c为叶片散射点的回波延时,vri为叶片散射点相对于雷达的径向速度。
由于场景中除了叶片自身的回波,还包括从天线旁瓣进入的地杂波、塔筒回波以及叶片和塔筒多径等回波。其中塔筒和地杂波回波由于位于零多普勒通道,因此对检测影响较小,但是其距离多普勒两维积分旁瓣分量和多径回波对目标的检测造成了比较强的干扰,因此需要对其进行检测剔除。雷达的总回波形式如下
stotal(t,tm)=sscene(t,tm)+sclu(t,tm)+snoise(t,tm)
(8)
3 所提方法的实现方法
根据大量实测数据的分析以及系统脉内/脉冲间的相位起伏,杂波和噪声的分布具有随机分布特征,由于噪声是高斯独立分布的,无法通过滤波器进行滤除,因此对于目标检测而言,系统必须保证信噪比。其次,旁瓣积分杂波和多径效应在距离、方位以及多通道间的相位也会具有比较大的随机性。
另外,叶片的回波能量是由叶片散射点集的回波组成,其整体结构呈现近似线性的变化趋势,在一个相干积累时间之内,每一个距离分辨单位内的散射点多普勒扩展随着与雷达之间的距离呈现逐渐变大的趋势,同时,结合目标叶片散射点集与两个通道之间的固定相位差,可以利用目标在距离、速度和通道干涉相位图的包络约束特性对叶片进行检测,同时剔除噪声和杂波虚警点。
假设连续波雷达系统采用双通道干涉相位体制,在相干积累时间内共发射了M组脉冲信号,感兴趣距离门总数为L。对解线频调之后的接收信号进行两维FFT处理得到距离和多普勒两维积累之后的回波。第l个距离单元、第m个脉冲、第n个通道信号两维积累的处理如下
xn,m,l=FFTazi(FFTrange(stotal·ωrange)·ωazi)
(9)
其中FFTrange和FFTazi分别是对目标沿着距离和方位分别进行FFT处理,ωrange和ωazi是距离和方位的窗函数,再得到上述距离和方位积累回波之后,可以计算两个通道之间的干涉相位,其处理方式如下

(10)
结合目标在距离、速度平面以及干涉相位平面的包络约束特征,通过图像计算函数分别对距离多普勒图和干涉相位图进行包络检测,并计算其交集部分,处理过程如下
clu1=cluster(x1.m,1)
clu2=cluster(φm,l)
(11)
clu=clu1∩clu2
(12)
得到目标的置信区间clu之后,对每一个距离门内检测到的多个数据进行单元平均,进一步通过非相干积累提升信杂噪比,其距离门和干涉相位信息如下

(13)
(14)
由于叶片的近似线性分布,并结合其与雷达之间的几何分布模型,可以对多个连续距离的干涉相位信息进行二阶拟合处理,其操作如下
α=polyfit(φl)
(15)
φpoly=polyval(Ri,α),i=1,2,…,L
(16)
在得到拟合干涉相位之后,可以根据两个通道之间与叶片仰角之间的相位关系反算得到目标叶片不同散射点集相对于雷达的仰角,其换算公式如下
(17)
其中d为两个通道之间的阵元中心间距,λ为发射信号的波长,asin()为反余弦函数。结合仰角、距离以及雷达与塔筒之间的几何关系,可以进一步得到叶片与塔筒间的净空值,算法的整个流程图如图2所示。
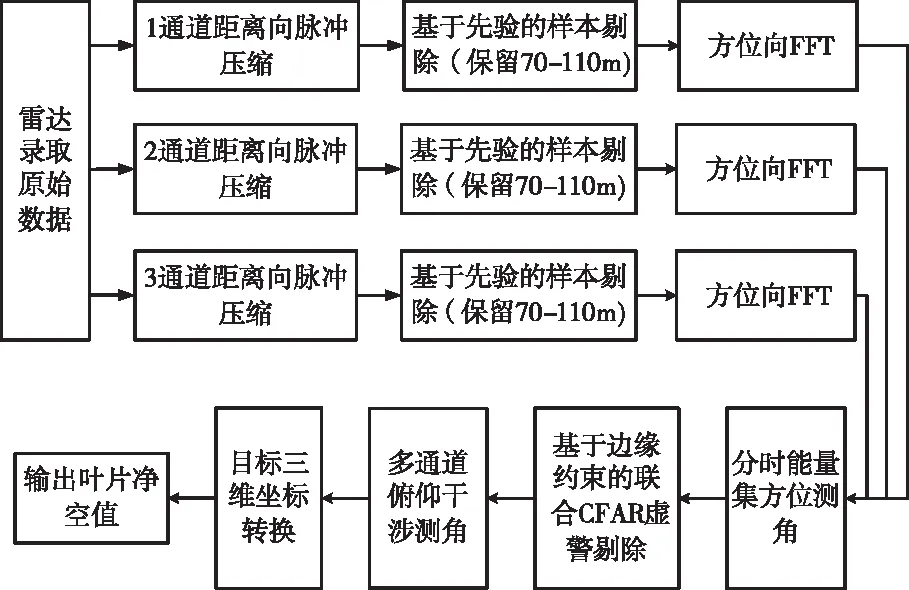
图2 基于边缘约束的幅相联合叶片净空测量流程图
4 仿真研究
为了充分验证所提方法的实际应用效果,利用某研究所开发的毫米波净空监测雷达在风力发电厂的地面端进行了实际测量实验,录取不同风况、不同朝向的数据,其现场测试环境如图3、图4所示。

图3 风电现场实际测量环境
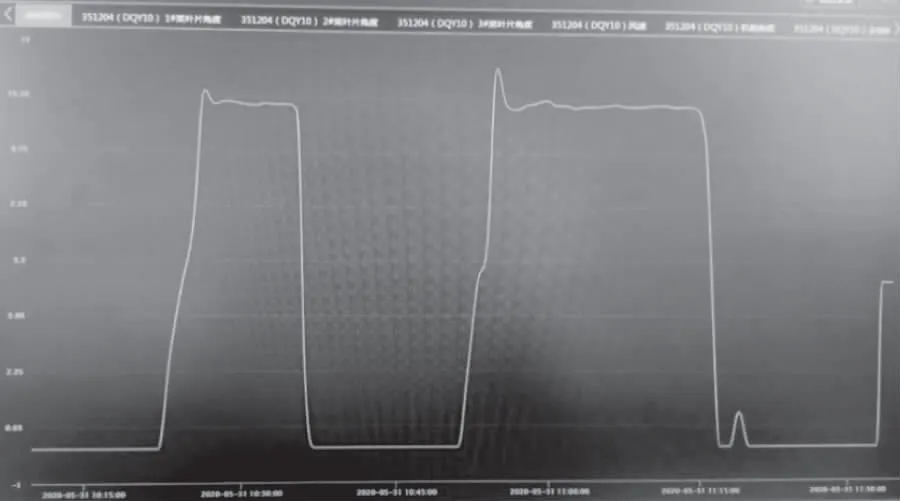
图4 测量过程中风机的实时转速
录取的实际测量数据涵盖了从2r/min到12r/min的数据样本,并且因风速的实时变化,风机在测量过程中出现了不同的朝向,其场景会出现一定程度的变化,刚好为验证本文所提方法的稳定性提供了数据多样性。因此,这组实测数据可以较好的验证所提方法的性能。
图5给出了风机处于10r/min情况下录取的实测数据距离多普勒两维分布情况。其中图5(a)是回波的能量分布图,图5(b)是回波的两通道干涉相位图。如果对上图的结果直接进行检测处理,除了能检测到叶片的目标,还能够检测到很多扩展的杂波以及强噪声点。如果将上述所有检测点共同应用于叶片与塔筒之间的距离评估,会导致系统的测量误差增加,其目标序列对应的净空估计结果如表1中所示,出现了净空的跳变现象,不符合叶片净空的连续性现象。
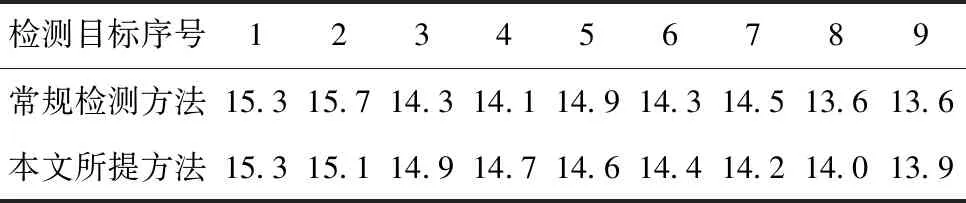
表1 不同目标点相对于塔筒的距离测量值
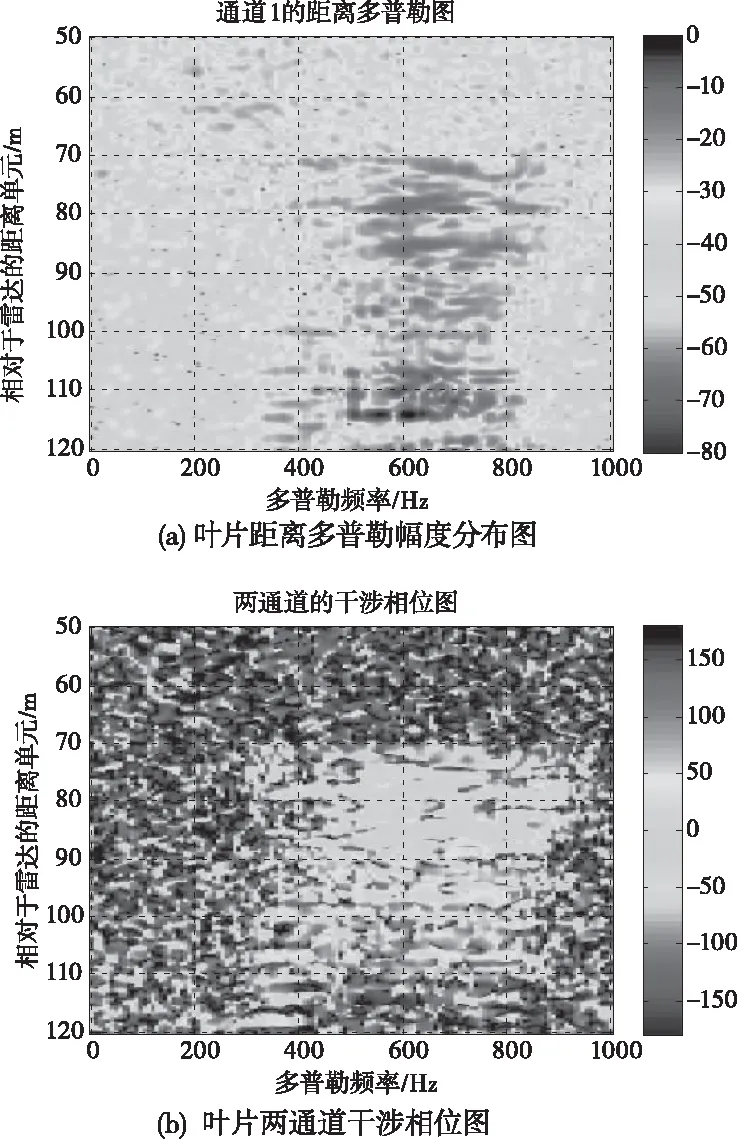
图5 叶片距离多普勒幅度分布图
然而,从上图中可以看出叶片回波的幅度和干涉相位均存在比较明显的集中现象,因此可以基于上述先验信息,利用基于图像能量阈值的边缘约束方法提取叶片的边缘轮廓。另外,由于塔筒与叶片之间存在镜面/非镜面的多径效应,因此在目标的能量和干涉分布集中区域出现了干涉相位跳变的现象,这是由于多径目标的空间观测仰角发生了变化,使得干涉相位发生了变化,因此可以在边缘约束的基础上,利用幅相二维联合检测的方法,对边缘轮廓内的目标进行二次剔除,从而提升叶片目标的识别精度,为提取叶片的净空信息提供保障。
图6给出了利用能量阈值控制和边缘检测的结果,从图6(b)的干涉相位图掩膜可以明显发现,能够有效提取叶片观测仰角一直的区域,且随着距离的变化呈现连续性变化趋势。图7在上述检测结果的基础上应用最小二乘拟合和检测点单元非相干叠加技术,在提升叶片目标干涉相位估计精度的同时,得到了叶片相对于塔筒边缘的净空值。由图7(a)可以发现,由于在边缘约束范围内,无法剔除所有的非叶片目标杂波点,因此需要利用最小二程拟合技术对上述结果进行平滑处理,从而保证系统的稳定度。图7(b)给出了考虑塔筒模型和雷达间几何关系的转换后净空测量值,与激光测量仪的实际结果相差≤0.5m,测量结果完全符合工业应用要求。详细的净空点测量信息如表1所示,通过对比发现,采用本文所提的方法能够显著改善因杂波和强噪声环境引起的净空估计跳变问题,并且提升净空的估计精度。因此,本文所提算法相比常规的检测和干涉相位测角技术,具有更有的稳定性和测量精度,提升系统针对风机复杂工作场景下的干扰点剔除能力。另外,本文所提方法的计算复杂度较低,运算量增加可以忽略不计,因此其带来的系统增效在大多数应用场景下具备实际的工程价值。
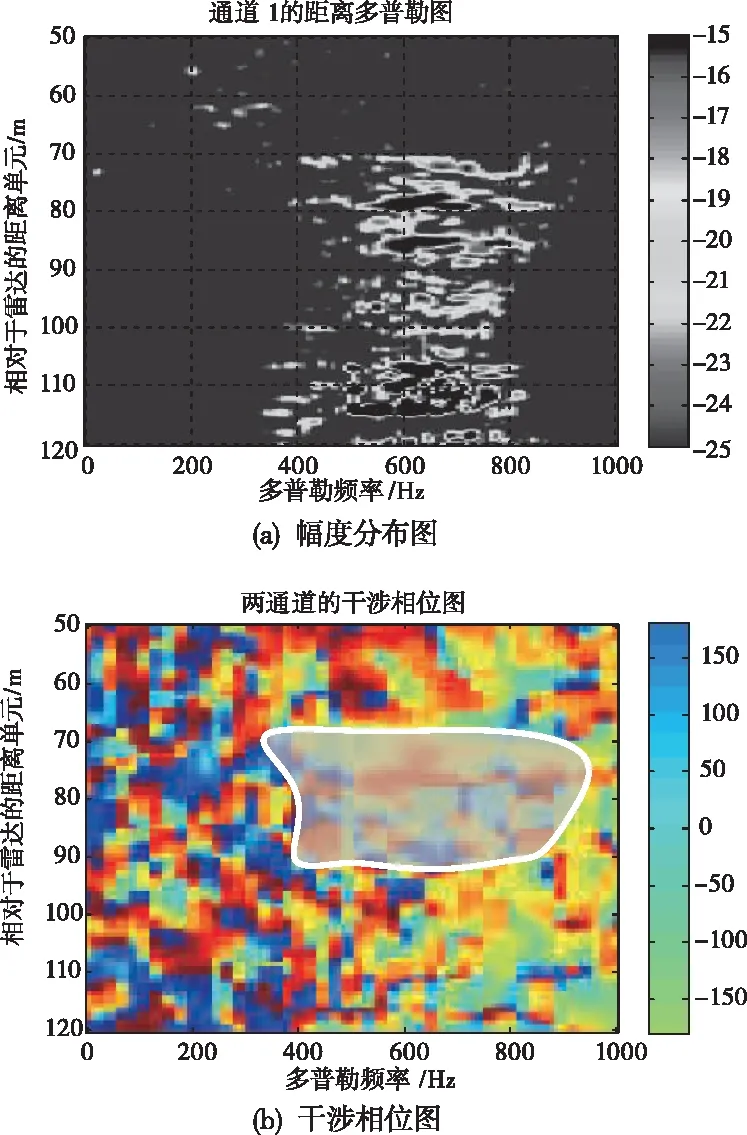
图6 基于边缘约束的距离多普勒幅度分布与两通道干涉相位图
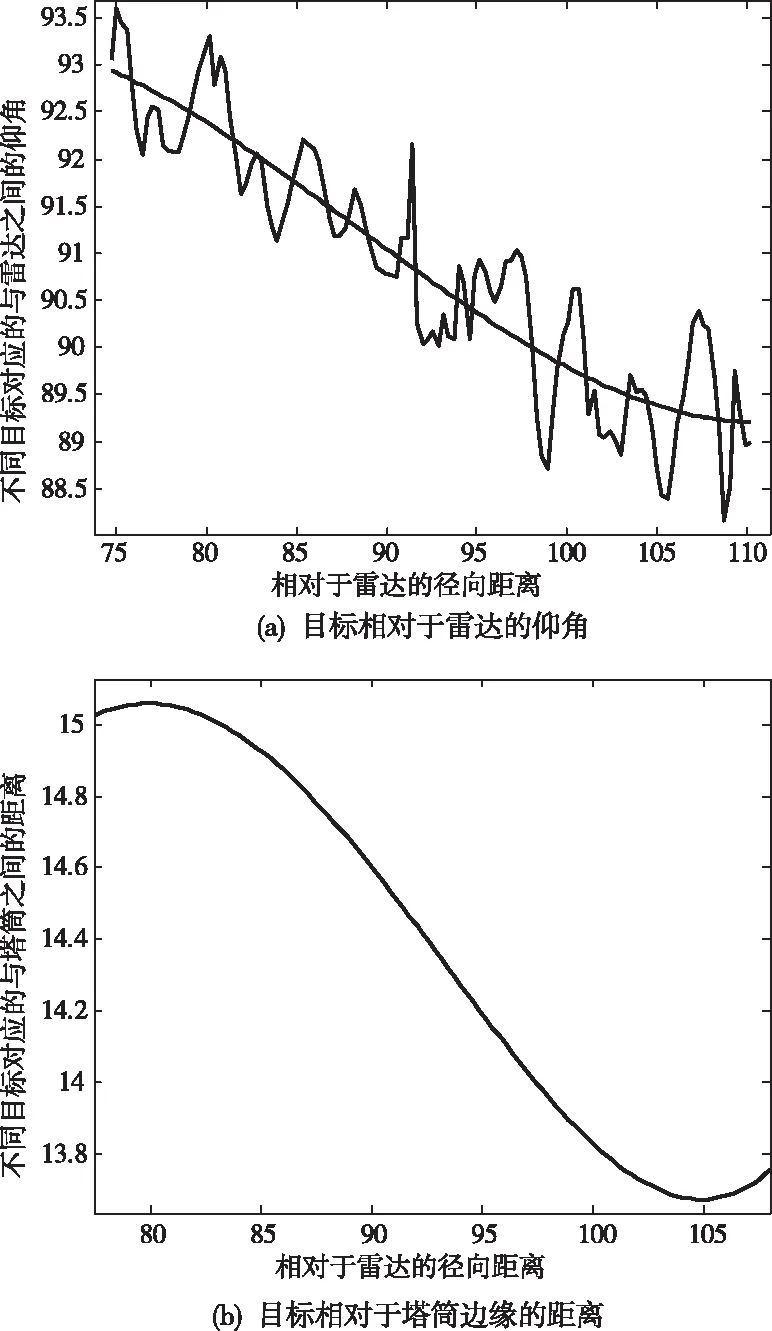
图7 基于边缘约束的叶片净空测量值
5 结论
本文所提方法提供了一种应用于地面安装雷达测量风机叶片相对于塔筒净空的测量方法,能够有效克服叶片与塔筒多次弹射和塔筒晃动引起的杂波扩散及虚警检测问题。该方法基于叶片的整体先验信息以及图像能量阈值边界约束方法,联合目标的距离多普勒幅相二维分布图,应用掩膜检测的方法能够尽可能剔除非叶片的杂波信息,同时利用叶片的近似线性的变化特性,能够进一步剔除虚警点,最终利用最小二乘拟合和单元平均提升目标的相位估计精度,从而保证了叶片的净空估计连续性和准确性。所提算法能够在叶片高速旋转过程中塔筒震动导致的杂波扩散分布图中有效的识别出叶片分量,同时借助幅相二维检测图,能够改善在强杂波和噪声环境中的检测性能,适用于自适应叶片目标的选择与参数估计;另外所提方法应用的图像阈值约束和二维掩膜测量运算量极低,能够显著降低系统的运算复杂度,对于叶片实时监测系统的低成本化具有非常大的工程意义。
