四驱动电动汽车坡道行驶ASR控制仿真研究
2023-07-29唐阳山刘晶晶
唐阳山,刘晶晶,刘 畅,王 琪
(辽宁工业大学,辽宁 锦州 121001)
1 引言
近年来,电动汽车在快速发展的同时还存在着续驶里程短、行驶安全性差的问题。在电动车辆诸多驱动结构中,以轮毂或轮边驱动为核心的驱动方式在增强车辆安全性、操纵稳定性和提升整车能效等方面具备独特的优势[1]。轮毂电机驱动的电动汽车可以通过轮毂电机输入的电压或电流来控制驱动扭矩,大大缩短了控制时间且控制精度提高,降低了危险工况发生的可能[2]。驱动防滑系统(简称ASR)能够在车轮发生滑转时,实时调整电机的输出扭矩,使汽车的加速过程快速而稳定[3]。四轮轮毂电机电动汽车驱动防滑控制主要包括三方面:1)车速估计。驱动防滑控制主要原理是控制驱动轮滑转率,计算滑转率时汽车纵向速度为主要值,纵向车速估计的准确性十分必要。2)路面识别。车轮在不同附着条件路面产生的滑转率也不同,两者的精确识别对驱动防滑控制效果影响很大。3)驱动防滑控制策略。根据获得的实际滑转率,实时控制轮毂电机的输出转矩来达到控制车轮不打滑的目的。
本文针对平路和坡路行驶的四轮轮毂电机电动汽车ASR控制,首先基于CarSim和MATLAB/Simulink搭建整车模型,然后分别进行纵向车速估计、路面识别和驱动防滑控制。其中,在估计纵向车速时,考虑到路面坡度的影响,采用纵向动力学和运动学融合估计的方法将车速与坡度进行联合估计;建立模糊路面识别器进行路面峰值附着系数和最优滑转率识别;采用积分分离型PID控制算法进行驱动防滑控制。
2 四轮驱动轮毂电机电动汽车建模
2.1 CarSim和MATLAB/Simulink整车模型搭建
采用CarSim和MATLAB/Simulink搭建整车模型,采用一个PID控制器来模拟驾驶员对车辆的加减速操作[4]。轮毂电机电动汽车整车模型如图1。
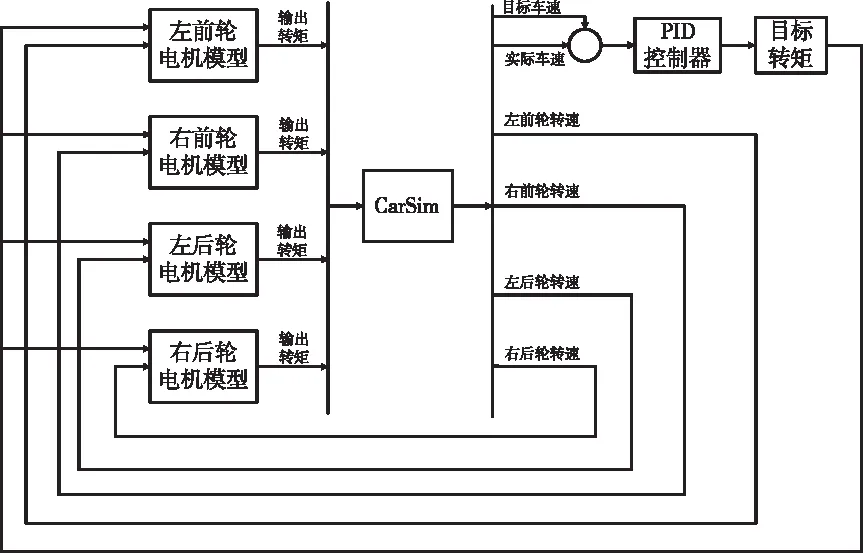
图1 轮毂电机电动汽车整车模型
轮毂电机电动汽车所需动力是将CarSim传统燃油汽车的动力传动系统全部改为外部输入,输入由Simulink搭建的轮毂电机模型产生的驱动力矩。模型所需参数见表1。

表1 轮毂电机电动汽车模型参数
在Simulink中搭建轮毂电机模型,考虑电机结构、功率、可控性等特点选择无刷直流电机。理想的电机模型需要简化:不计电枢反应、涡流损耗和磁滞损耗;气隙磁场分布为梯形波;忽略电机铁芯饱和;驱动系统逆变电路的功率管和续流二级管均具有理想的开关特性[3]。轮毂电机相电压方程为

(1)
Pe=eAiA+eBiB+eCiC=TeΩ
(2)
(3)
(4)
式中,uA、uB、uC—A相、B相、C相绕组电压;eA、eB、eC—A相、B相、C相反电势;Te、Tl—电磁转矩、负载转矩;J—转子转动惯量;Ω—电机机械角速度;Bv—黏滞摩擦系数;L—相绕组自感;M—相绕组互感。
2.2 整车模型验证
在CarSim中设置路面附着系数为0.8的双移线工况,将搭建的轮毂电机电动汽车整车模型和CarSim传统车进行侧向位移和横摆角加速度仿真对比分析,如图2和图3。

图2 侧向位移对比
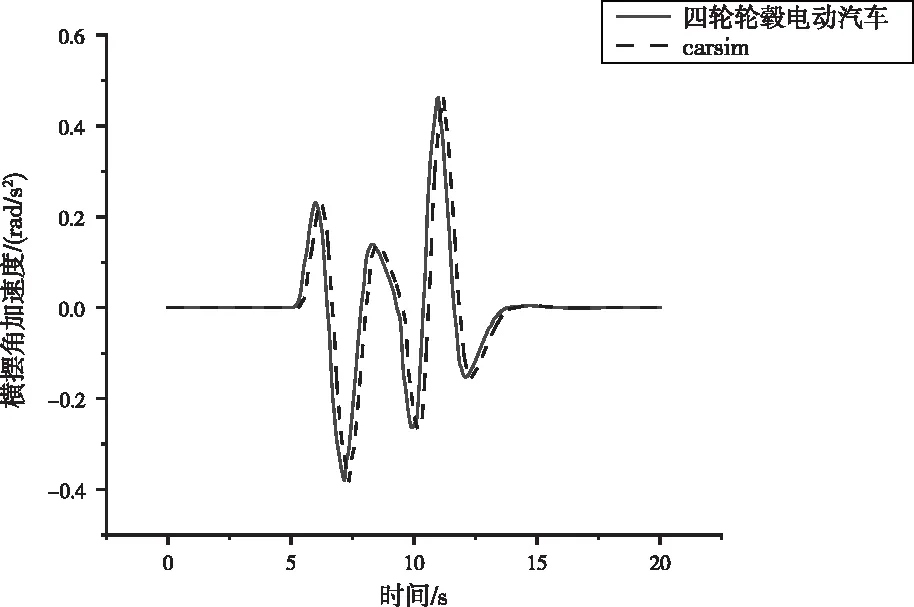
图3 横摆角加速度对比
由仿真结果可以看出搭建的四轮轮毂电动汽车与CarSim标准车差别很小,证明搭建的整车模型可用于后面控制算法的仿真验证。
3 车速与坡度联合估计
汽车车速和道路坡度信息是电动汽车动力性控制的关键参数。本文考虑在汽车不打滑不失稳的情况下,依据非线性纵向动力学方程和运动学方程,采用UKF估计方法对四轮独立驱动电动汽车行驶时的纵向车速和纵向坡度进行联合估计,由CarSim和MATLAB/Simulink联合仿真验证算法。
3.1 纵向动力学模型和运动学模型
四轮轮毂电机电动汽车行驶时纵向动力学模型为
(5)
由于各轮驱动力矩可通过安装在每个驱动轮上的轮毂电机直接获得,本文选择利用车轮转动方程来计算驱动力[6],整车驱动力可由四个驱动轮驱动力之和得到。考虑到汽车在有坡度路面行驶载荷转移的情况,单个驱动轮驱动力计算公式为

(6)
各驱动轮的垂向力的计算公式为

(7)
纵向加速度传感器通常安装于车身,由模拟的电压信号幅值表征测量值[7]。汽车加速时纵向加速度传感器值受车辆本身纵向加速度和当前道路坡度影响。关系式为

(8)
式中,asenx—纵向加速度传感器测量值。
3.2 基于UKF的车速与坡度联合估计

(9)
量测方程为
(10)
根据运动学模型的状态方程和量测方程分别为

(11)
和
(12)
车辆在行驶过程中,基于动力学模型的路面坡度估计精度通常受高频噪声影响较大,而基于运动学模型估计的坡度受加速度传感器静态偏差影响较大,属于低频噪声[9],因此可采用式(13)来实现最终坡度估计
(13)
式中,τ—时间常数;θ1—根据动力学模型估计的坡度值;θ2—根据运动学方程估计的坡度值。
3.3 仿真验证
在CarSim设置仿真工况:设置两条道路,分别为从平直道路行驶到上坡道路和坡度连续变化道路。车辆均从0开始起步,路面附着系数为0.8,方向盘始终保持不动,仿真结果见图4、图5、图6和图7。
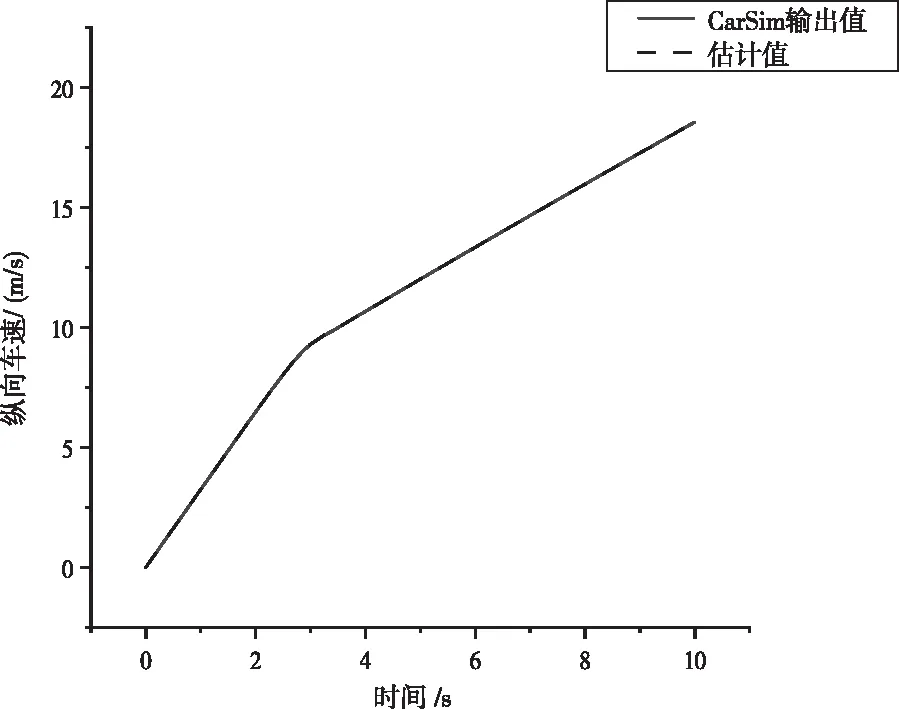
图4 上坡路面纵向车速

图5 上坡路面纵向坡度
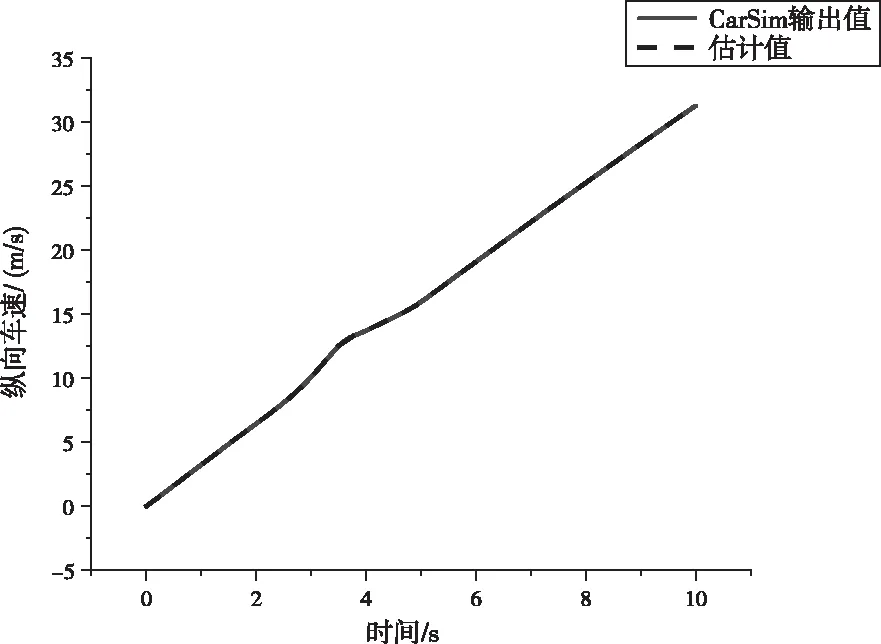
图6 连续坡度路面纵向车速

图7 连续坡度路面纵向坡度
由仿真结果可以看出联合估计效果很好,纵向车速和纵向坡度都能很好的跟踪,坡度估计的误差稳定在一个较小的范围内。
4 路面识别
4.1 标准曲线
Burckhardt轮胎模型[10]拟合公式为
μ(s)=C1(1-e-C2s)-C3s
(14)
式中,C1、C2、C3—拟合系数。
令式(14)的导数等于0,可求得路面的最优滑转率及峰值附着系数为

(15)
选取了冰、雪、湿鹅卵石、高、中、低湿沥青等8条路面,各路面参数见表2。
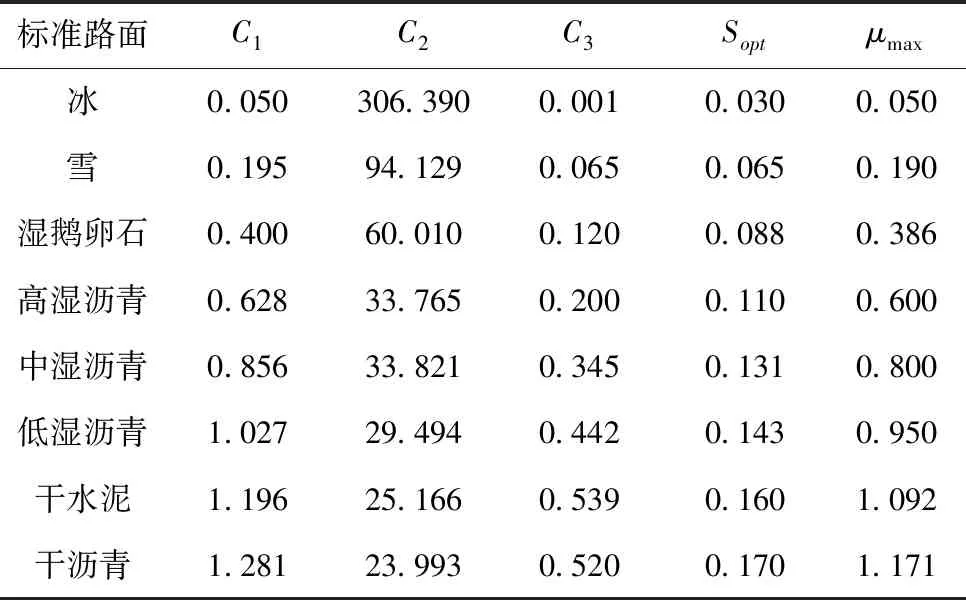
表2 标准路面参数表
8条标准路面滑转率-附着系数曲线如图8。
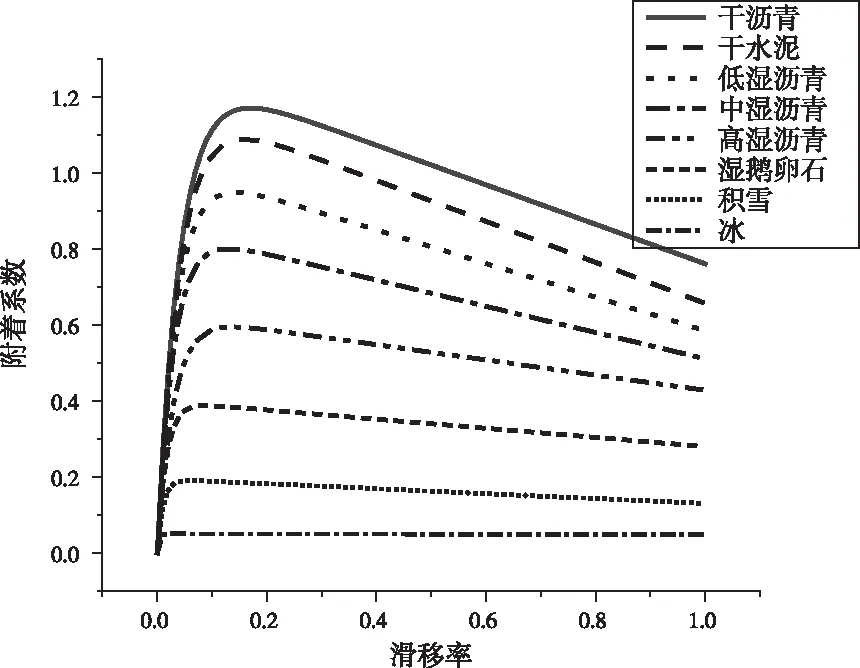
图8 标准路面曲线图
4.2 模糊路面识别器设计
模糊路面识别器输入分别为驱动轮滑转率和路面附着系数,输出量为8个相似度系数。在MATLAB中设置模糊路面识别器,对实际滑转率和路面附着系数进行模糊化,分为三个模糊子集,分别为小滑转率[0,0.05],中滑转率[0.05,0.15]和大滑转率[0.15,1];路面附着系数分为8个模糊子集。两输入模糊隶属度函数如图9、图10。
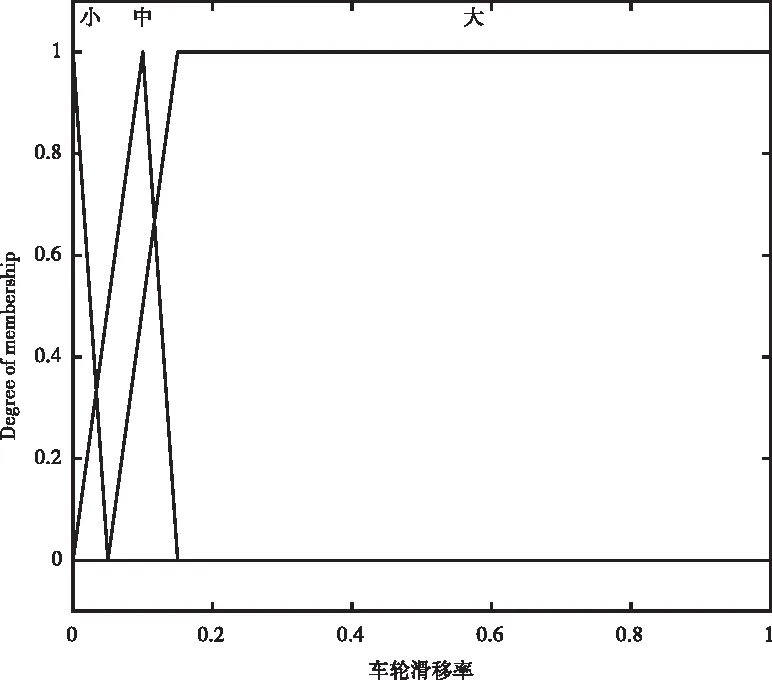
图9 车轮滑转率隶属度函数
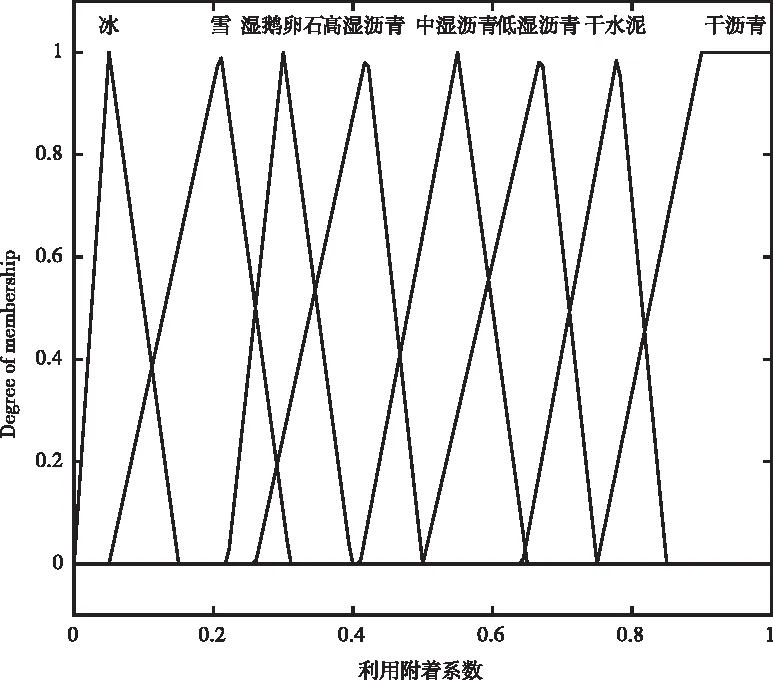
图10 附着系数隶属度函数
模糊推理规则的设定依据专家经验法,分别用十分不相似(TD)、不相似(D)、一般相似(RS)、相似(S)、很相似(ES)五个模糊状态语言表述,模糊规则表见图11。
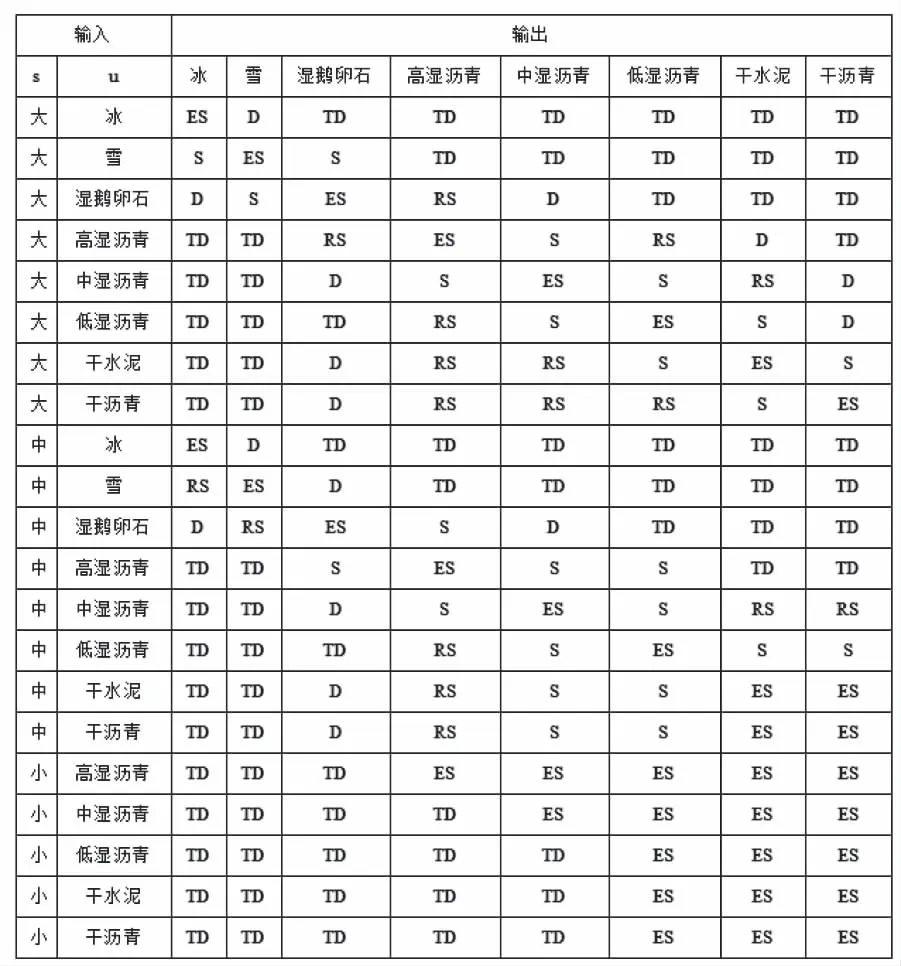
图11 模糊规则表
解模糊规则如图12。

图12 相似度隶属度函数
由模糊路面识别器得到的相似度系数通过式(16)和式(17)计算后得到当前路面的sopt(最优滑转率)和μmax(峰值附着系数)。
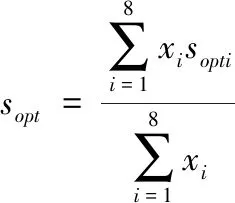
(16)
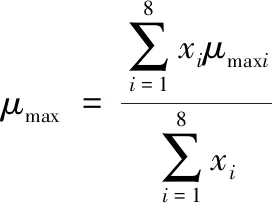
(17)
4.3 路面识别仿真验证
1)单一低附上坡路面
在CarSim中设置一条路面附着系数为0.2的道路,车辆从平直道路开始起步加速,3s后爬坡,方向盘始终保持不动,仿真结果见图13、图14。
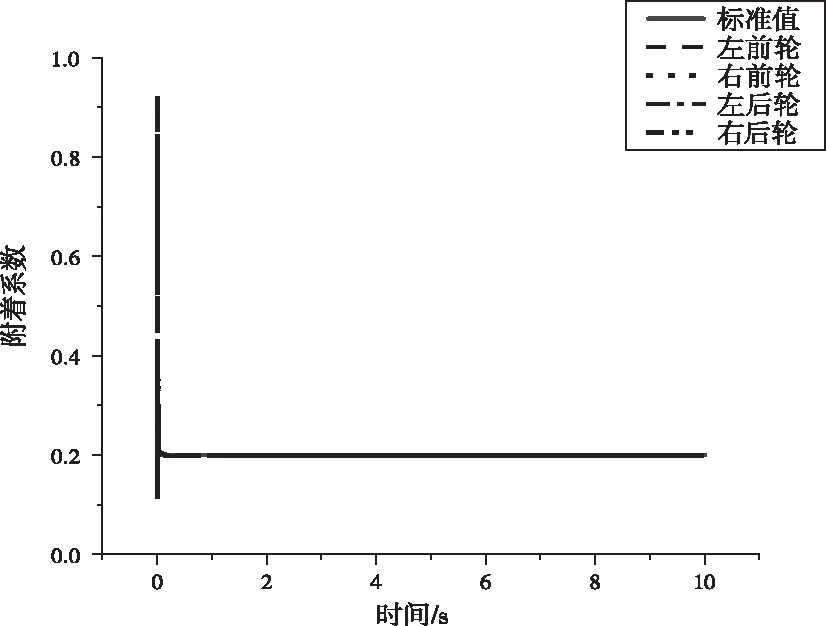
图13 u=0.2上坡路面峰值附着系数
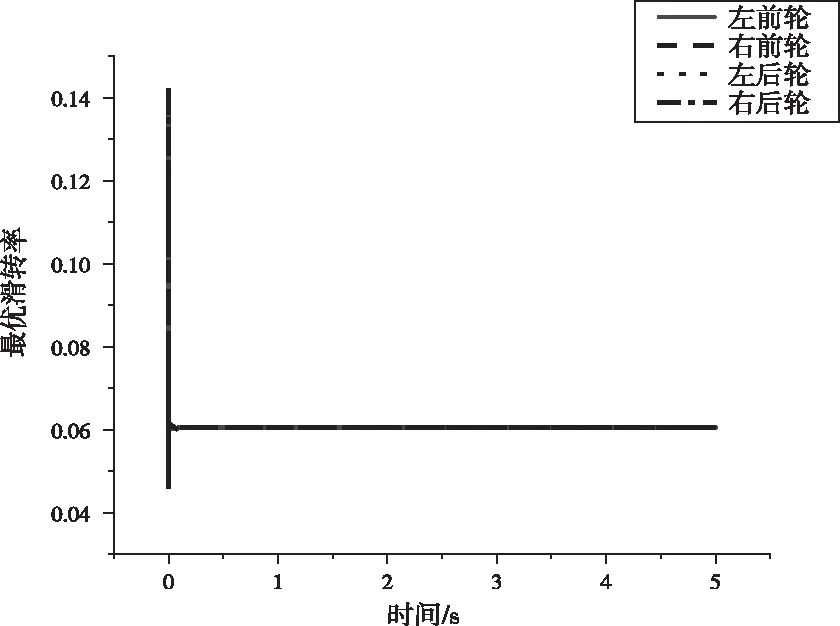
图14 u=0.2上坡路面最优滑转率
2)对接路面
对接路面设置:-100m到30m附着系数为0.8,30m之后为0.25,车辆从0m位置处起步加速驶入低附着路面,方向盘始终保持不动,仿真结果见图15、图16。
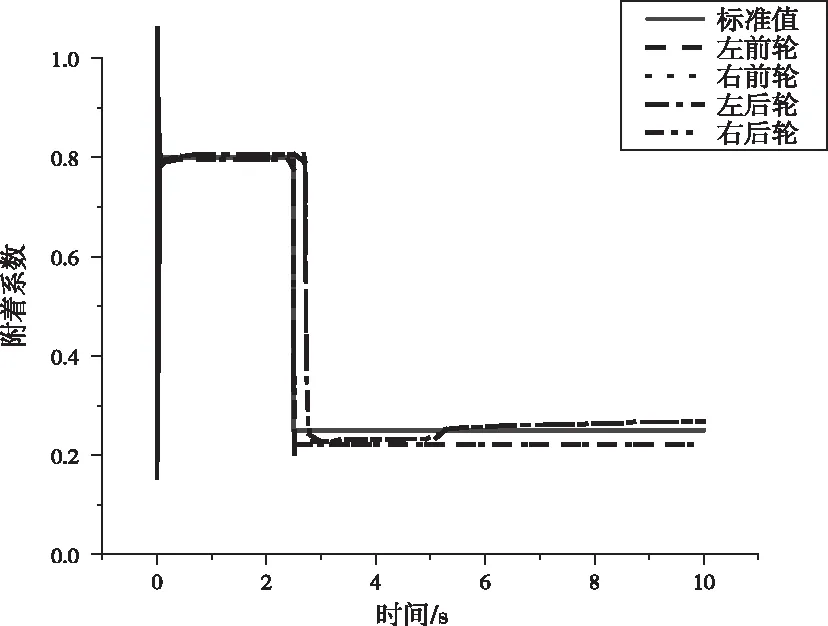
图15 对接路面峰值附着系数
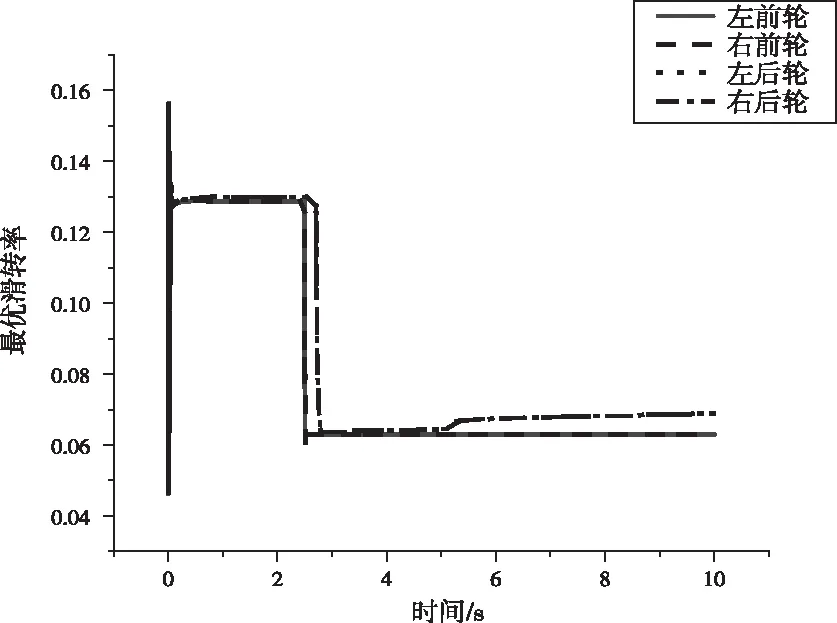
图16 对接路面最优滑转率
仿真结果表明所设计的模糊路面识别器能够得到较准确的结果,对于均一低附着上坡路面偏差几乎为0,对于对接路面,偏差在0.03以内,在可接受范围。
5 驱动防滑控制
5.1 驱动防滑控制算法分析
以滑转率为控制目标的驱动防滑控制整体架构如图17。
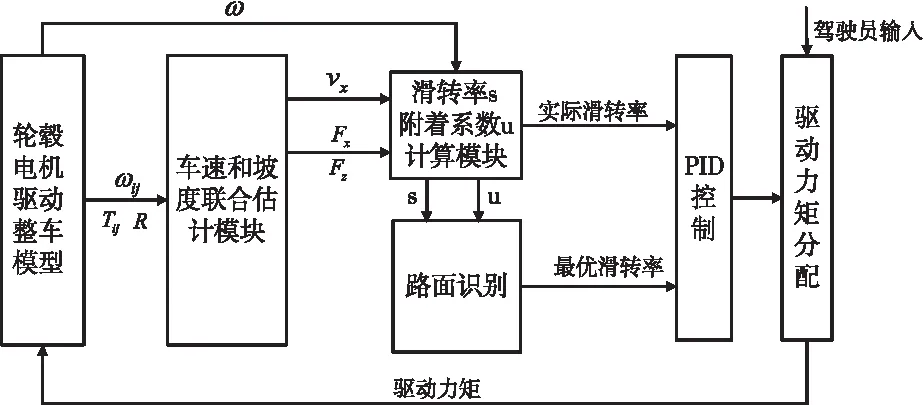
图17 驱动防滑整体架构图
PID控制主要是通过调节P、I、D的值来实现滑转率控制。当实际滑转率与最优滑转率相差很大时,会引起过大的系统超调,甚至引起系统的振荡。积分分离型PID控制算法既能保持积分作用,又能减少超调量[10]。其控制方法为:选定一个阈值μ,当输入偏差e超过μ时采用PD控制,否则采用PID控制。在Simulink中搭建PID控制模块如图18。
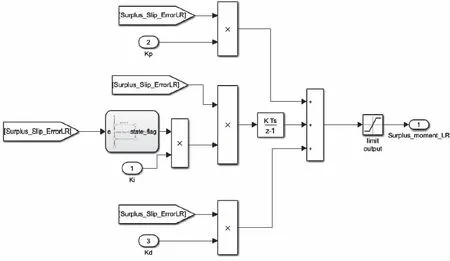
图18 PID控制模块图
经过PID控制后输出ASR力矩,将此力矩与驾驶员输入的目标力矩进行驱动力矩分配。车辆在驶入对开路面时,对两侧车轮单独进行控制会发生侧滑现象,由于本文只研究车辆纵向直行工况,因此在驱动力分配模块选择低选控制原则。
5.2 驱动防滑控制仿真分析
1)在CarSim中设置一条均一低附直行道路,路面附着系数为0.25,车辆以0m/s起步加速行驶,仿真结果如图19、图20、图21、图22。
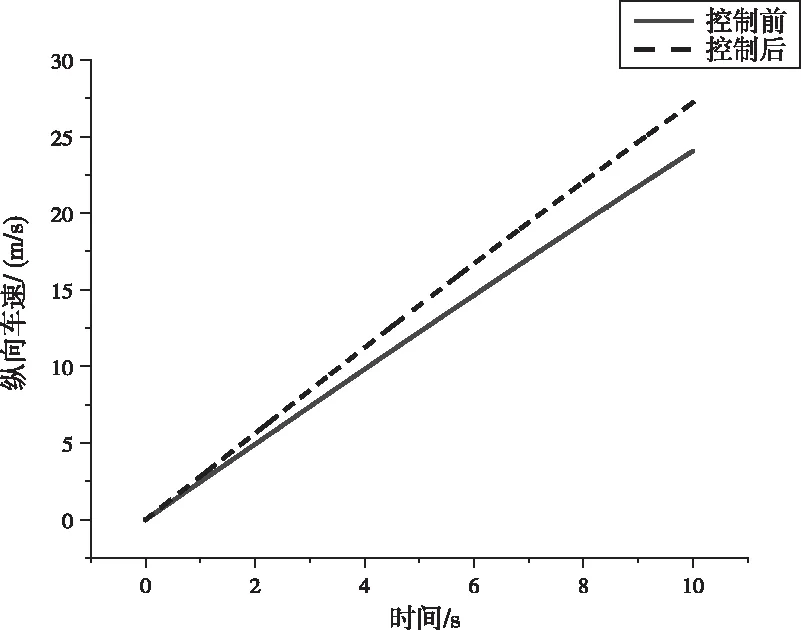
图19 均一低附直行纵向车速
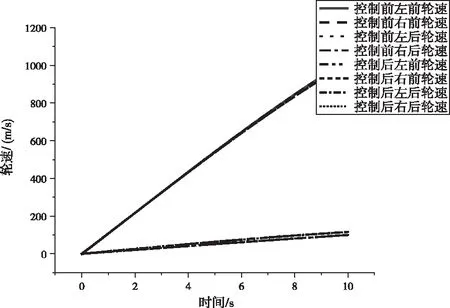
图20 均一低附直行轮速
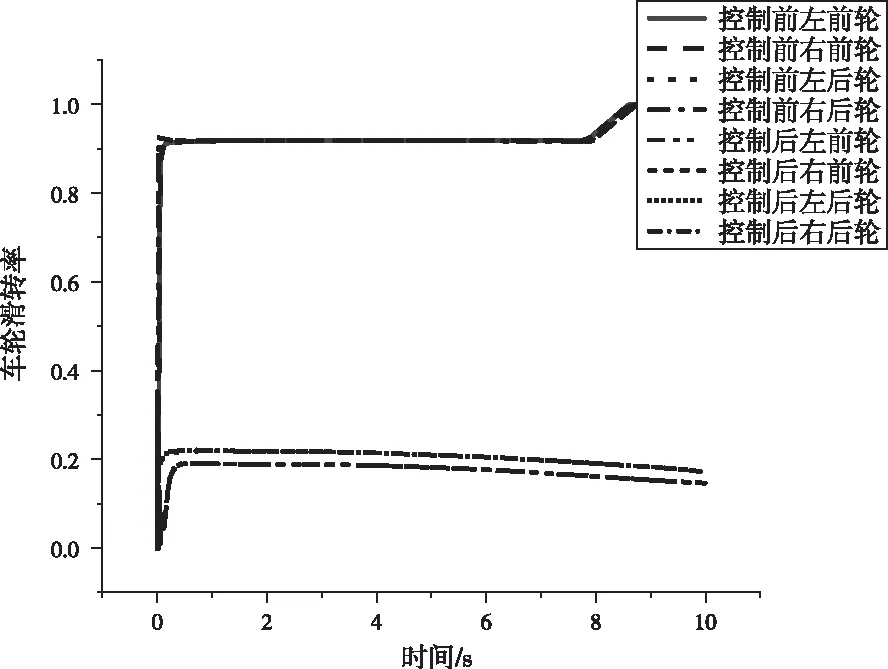
图21 均一低附直行车轮滑转率

图22 均一低附直行驱动力矩
从图中可以看到,没有控制时,由于路面为低附路面,车辆在刚开始起步时便出现了打滑现象,轮速迅速增加。采取控制后,驱动轮轮速和滑转率有所下降,纵向车速有所提升,驱动防滑控制策略起到了作用。
2)设置一条均一低附上坡道路,路面附着系数为0.25,车辆从3s开始爬坡,仿真结果如图23、图24、图25、图26。

图23 均一低附上坡车速
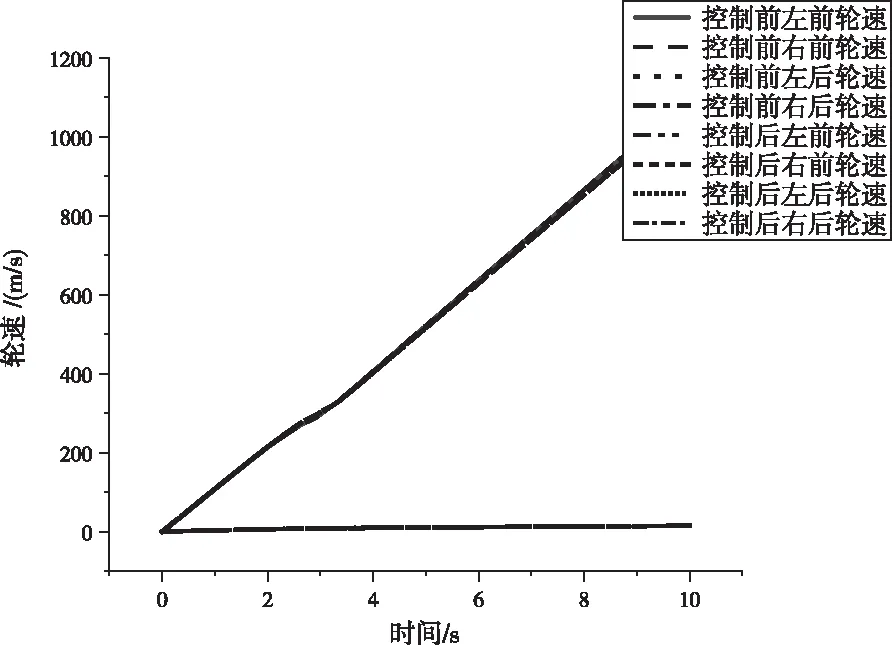
图24 均一低附上坡轮速
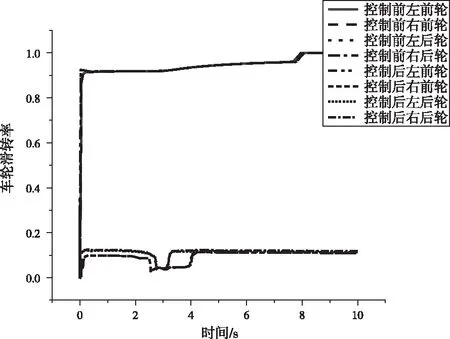
图25 均一低附上坡车轮滑转率
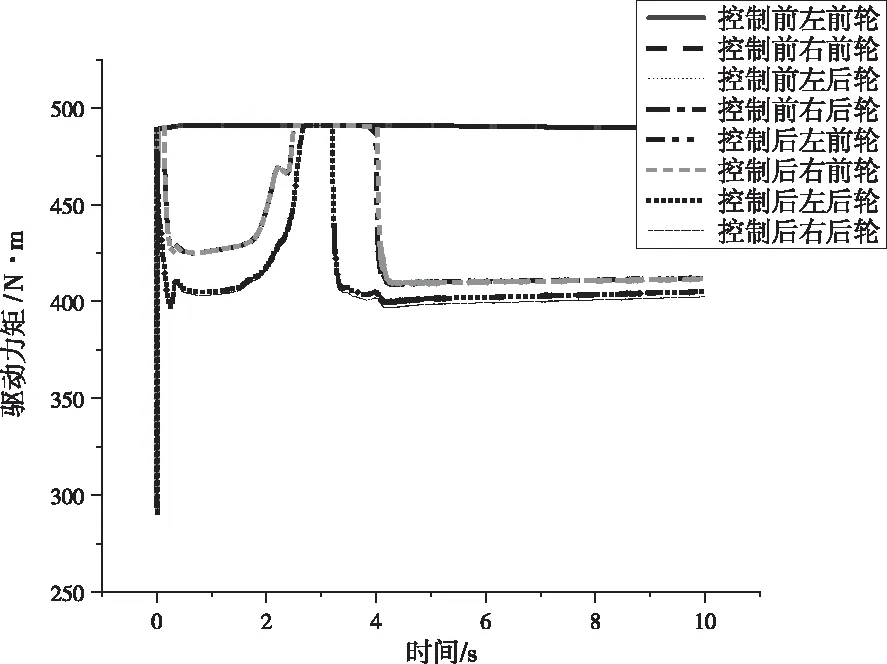
图26 均一低附上坡驱动力矩
从图中可以看到,车辆驶入到坡度路面仍旧在加速行驶,但加速度有所降低。没有控制时,车辆在刚开始起步时便出现了打滑现象,轮速迅速增加。采取控制后,驱动轮轮速和滑转率有所下降,纵向车速有所提升,驱动防滑控制策略起到了作用。
3)设置一条对接道路,路面附着系数由0.8到0.25,车辆从0m/s起步,仿真结果如图27、图28、图29、图30。

图27 对接路面直行车速

图28 对接路面直行轮速
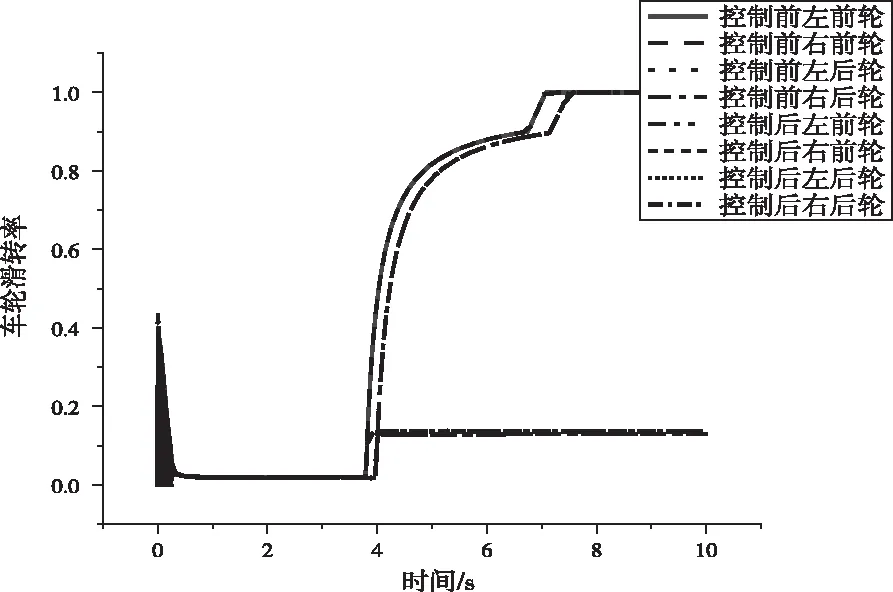
图29 对接路面直行车轮滑转率
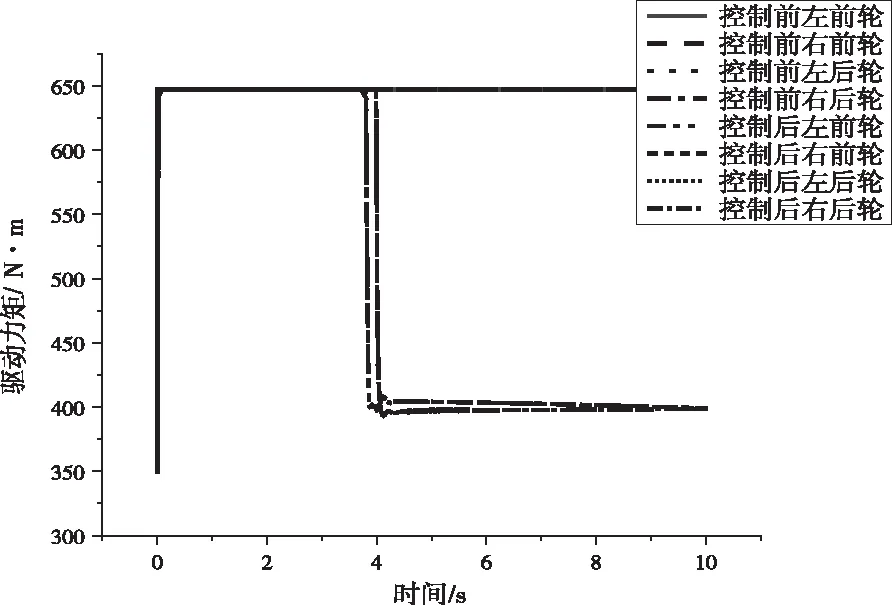
图30 对接路面直行驱动力矩
从图中可以看到,车辆在4s驶入低附着路面,速度仍在增加但纵向加速度降低。没有控制时,车辆在起步时出现了打滑现象,后恢复正常。在驶入低附着路面时,车轮开始打滑,轮速迅速增加,后轮相对于前轮延迟0.2s发生滑转,符合实际。采取控制后,驱动轮轮速和驱动轮滑转率有所下降,纵向车速有所提升,驱动防滑控制策略起到了作用。
6 结论
由仿真结果可知,考虑坡度影响的纵向车速和坡度联合估计结果更加精确,偏差很小;模糊路面识别器能够精确识别出μmax(峰值附着系数)和sopt(最优滑转率);积分分离型PID驱动防滑控制策略能够降低驱动轮轮速,使车辆正常行驶。
