自组网通信下的机械臂关节振动频率自动检测
2023-07-29滕爱国赵新建李长柏林正权
滕爱国,赵新建,李长柏,林正权
(1.国网江苏省电力有限公司 信息通信分公司,南京 210024;2.北京智芯微电子科技有限公司,北京 102200)
作为机械生产领域的基础设备,机械臂关节出现故障问题,例如共振频率过大、协调性较差等,就会造成严重的经济损失,所以机械臂关节的振动频率检测一直是相关工作人员的关注重点。随着智能机械化的不断提升[1-2],研究机械手关节振动频率检测技术具有重要意义。
文献[3]将检测点与边缘检测算法投入到测量模型中,完成机械臂关节振动频率检测,但是该方法难以应对柔性空间机械臂负载、臂形与固有频率的关系,导致方法的检测时间过长;文献[4]采用增广算法将最佳测量点输入到标定模型中,完成机械臂关节振动频率检测,但是该方法没有考虑到共振频率的相关问题,导致方法的信号采集效果差;文献[5]根据机械臂关节的振动响应构建驱动模型,完成机械臂关节振动频率检测,但是该方法没有对机械臂关节振动信号做降噪处理,导致检测效果差。
为了解决上述方法中存在的问题,提出自组网通信下的机械臂关节振动频率自动检测方法。
1 优化机械臂关节振动信号
1.1 基于自组网通信模型的振动信号采集
自组网通信模型是一种基于分布式原则与多跳通信传输的网络模型,通过通信系统的设置实现机械臂关节振动信号的采集、传输与检测。结构如图1 所示。
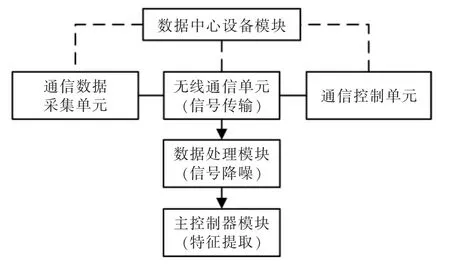
图1 自组网通信模型Fig.1 Ad hoc network communication model
具体步骤如下:
(1)在机械臂关节的工作过程中,远程通信数据采集单元负责采集机械臂关节的振动信号[6]。假设采集时间为T、信号表达序列定义为U,公式如下所示:
式中:k 表示信号采集时间间隔;v 代表采集表达序列的维度。
(2)采用通信控制单元表达信号序列中前k 个时间段的信息,得到机械臂关节振动状态的信号K,公式如下所示:
(3)为了保证信号传输的可靠性,无线通信单元采用了公用无线频段,保证同一频域内不同信号间的频率资源互不干扰,避开共振频率范围,采集到的振动信号如下所示:
式中:n 表示频率资源个数;ei表示第i 个频率捷变阶段。
1.2 振动频率计数特征提取
针对降噪后的机械臂关节振动信号,自组网通信模型中的主控制器模块采用原子分解算法提取信号的特征,具体步骤如下:
(1)基于原子分解的信号特征提取,是由基本的滑动窗口函数经过压缩、平移调制生成的。振动频率计数表达公式如下所示:
式中:l 代表原子分解式;u 代表降噪后的机械臂关节振动信号;α 为相位因子;r 为尺度因子;β 表示信号的被检测频率;χ 代表位移分子;δ 表示的是原子分解式的索引;R 为窗口滑动函数。
(2)主控制器模块在原子分解过程中引入匹配追踪算法,根据索引方式扫描原子库从而得到与机械臂关节振动信号最相近的原子表达形式,然后抽取出最佳组成成分,构成机械臂关节振动属性,公式如下所示:
式中:o 为信号最佳组成成分;n 代表最大迭代次数;z 代表的是残余信号。
(3)在匹配追踪过程中,最终目的是找到窗口函数与目标信号之间的最大内积,并保证c 次迭代不超过最大迭代次数n,结合机械臂传递函数的幅频特性及相关函数,公式如下所示:
(4)经过c 次迭代后,采用衰减正弦量表达提取的振动频率计数特征,公式如下所示:
式中:D 代表的是衰减正弦量幅值;d 代表提取的机械臂关节振动信号特征;s 为单位阶跃函数。
2 机械臂关节振动频率自动检测方法
采用振动频率测量仪,通过精密确定振动时间与振动次数,实现机械臂关节振动频率的自动检测。具体步骤如下:
(1)振动属性
1)设置转换电路、放大电路、编程门列阵、中心处理单元CPU 与显示装置等。
2)主控制器模块提取的振动信号与振动频率计数特征,经过转换电路后转化成数字信号,然后通过放大电路,扩大信号振幅,并存储于测量仪的编程门列阵中。振幅扩大公式如下所示:
式中:b 表示振幅函数;ε 代表信号的传播系数;B 为放大后的信号振幅;g 为振动频率;h 表示放大电路的参数;V 为振幅放大系数。
(2)振动时间
1)在过零点周围较小的范围内,机械臂关节振动信号的波形趋近于一条直线,因此可以通过直线位移测量法确定振动计数值Ma与被测信号之间的周期关系Sa,公式如下所示:
式中:W1、W2、W3、W4均代表过零点周围的采样值;SA/D表示A/D 转换器的采样周期;S1、S2均代表机械臂关节的振动时间。
2)通过插补细分法,分别对起始过零点Q1与终点过零点Qm所对应的振动时间进行精确计算后可知,过零点的中间点只需根据它们前后采样点的重构结果,即可判断其对应的振动时间,公式如下所示:
式中:Q 代表过零点集合;m 为过零点的数量。
3)机械臂关节的振动总时间S 由S1、S2、mSA/D3 部分组成,公式如下所示:
(3)振动次数
1)在起始过零点与终点过零点的前后采样值W1、W2不超过振动计数值Ma的前提下,采用线性插补算法计算出起始过零点与终点过零点的振动次数,公式如下所示:
式中:t 代表振动次数;I 代表的是非零整数。
2)当两个相邻的采样点正负相反时,说明这两点之间必然存在一个过零点,中央处理单元CPU 通过过零点数量得到机械臂关节的总振动次数,公式如下所示:
式中:t′代表机械臂关节的振动总次数;tM为起始过零点与终点过零点之间的时间差。
(4)振动频率
得到机械臂关节的振动时间与振动次数后,结合如图2 所示的振动频率测量仪工作过程,计算出振动频率F:
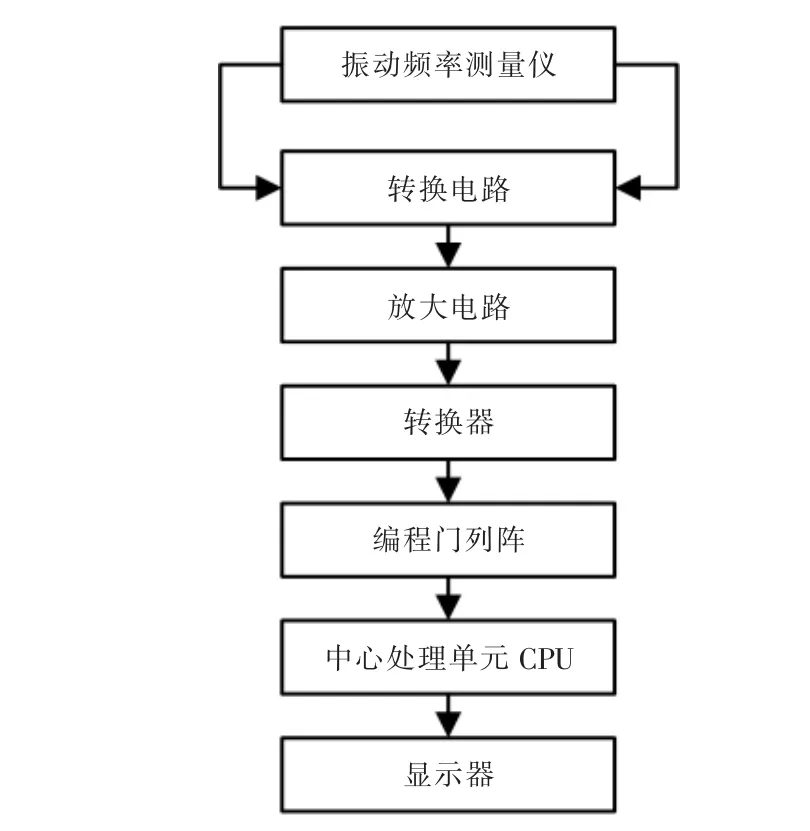
图2 振动频率测量仪Fig.2 Vibration frequency measuring instrument
图2 中,中心处理单元CPU 从编程门列阵中读取数字信号,通过过零补偿法,搜索振动时间内的过零点数量,再通过细分插补算法,二次计算起始过零点与终点过零点对应的时间,根据计算振动时间与振动次数,匹配机械臂关节振动属性,即完成机械臂关节振动频率的自动检测。
3 实验与分析
为了验证自组网通信下的机械臂关节振动频率自动检测方法的整体有效性,需要对其进行相关测试。
以某7 自由度机械臂为实验对象,如图3 所示。该机械臂在实际工作中需要处理不同的负载变量,在电容电压(C/V)转换电路、滤波电路、模/数转换电路、差分放大电路、FPGA 芯片和中央处理单元(CPU)等硬件设备的应用下,要求使用Cyclone II系列FPGA。其内部RAM 存储容量高达1 M,可以存储多达90000 多个12 位数据,所采用的A/D 转换器的采样频率可达40 M。根据4 种波形的数据计算频率值,如果转换后的数据能真实反映被采样信号的信息,则在一个周期内对信号至少采样16 个点,此时采样信号的最大频率为2.5 M,多种波形的64 个数据完全在RAM 存储容量内。

图3 机械臂关节Fig.3 Mechanical arm joint
依据上述基本参数,实验过程如下:
(1)振动传感器首次机械放大被测物体的振动幅度,并将其转换为电容量的变化形式,应用电容-电压转换电路将电容值转换为对应的电压值。
(2)将连续变化的电压信号输入到差分放大器电路以进行二次信号放大,使得电压信号在A/D 转换电路的范围内。
(3)通过滤波电路,高分辨率A/D 转换器开始对放大2 倍的信号进行采样和转换。采样和转换后的数据存储在FPGA 内部结构的RAM 存储器中。
(4)ARM 处理器根据设计的软件算法实时处理从FPGA 读取的数据,并驱动显示设备显示计算结果。
基于图3,将频率自动检测时间、信号采集效果、频率自动检测效果作为评价指标,采用所提方法、文献[3]方法、文献[4]方法和文献[5]方法完成实验。
3.1 频率自动检测时间
不同方法的测试结果如表1 所示。
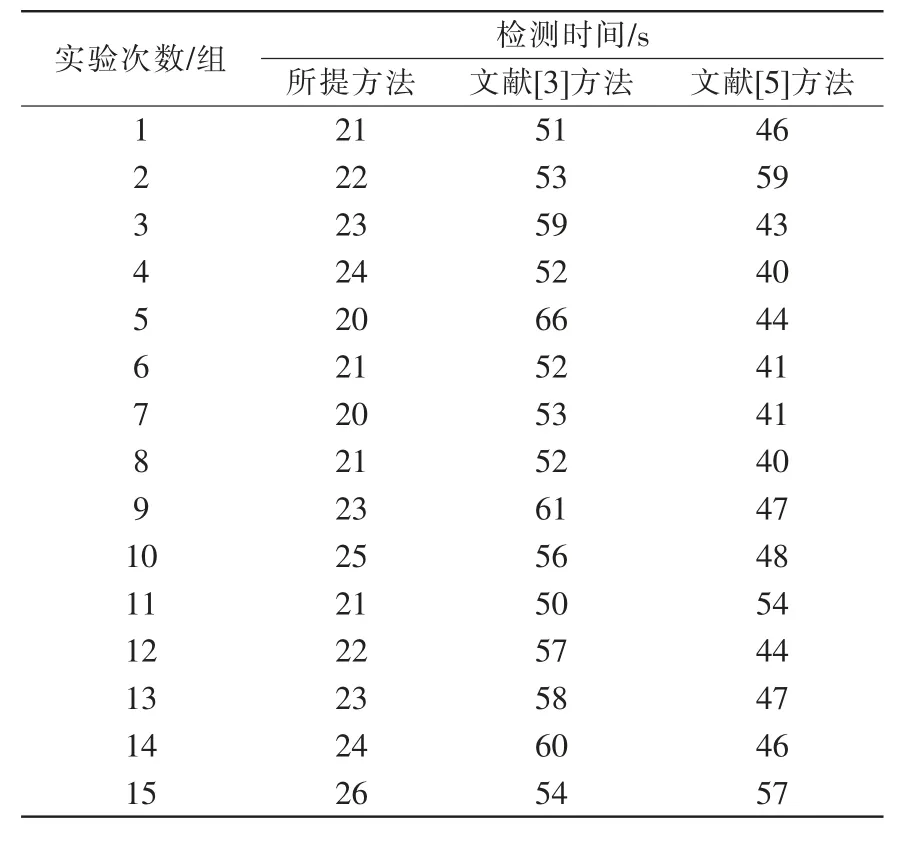
表1 不同方法的频率检测时间Tab.1 Frequency detection time of different methods
分析表1 可知,针对机械臂关节振动频率的自动检测,所提方法的检测时间在24 s 附近波动;文献[3]方法与文献[5]方法的检测时间分别在55 s 和47 s 附近波动。说明所提方法的频率自动检测效率高于文献[3]方法与文献[5]方法的频率自动检测效率。
3.2 振动信号采集效果
为了验证各个方法的信号采集能力,采用所提方法、文献[3]方法与文献[4]方法采集机械臂关节的振动信号,对比不同方法的信号采集效果,如图4所示。

图4 不同方法的信号采集效果Fig.4 Signal acquisition effects of different methods
分析图4 可知,所提方法采集的机械臂振动信号平稳,信号幅值波动较小;而文献[3]方法与文献[4]方法采集的振动信号幅值上下波动较大,并且采集的信号中存在明显噪声。说明针对机械臂关节振动信号的采集,所提方法的信号采集效果强于文献[3]方法与文献[4]方法的信号采集效果。
3.3 频率自动检测效果
利用电感式传感器采集机械臂关节振动时的信号,然后启动智能网关接入器,在检测系统客户端得到信号的振动频率,然后分别采用所提方法、文献[3]方法和文献[4]方法检测机械臂关节的振动频率,对比各个方法检测的信号频率与实际信号频率。频率越相近,表明方法的频率自动检测效果越好;频率相差越大,表明方法的频率自动检测效果越差。
所提方法、文献[3]方法和文献[4]方法的测试结果如图5 所示。分析图5 可知,针对机械臂关节振动频率的自动检测,所提方法检测的频率与实际频率基本一致,文献[3]方法与文献[4]方法检测的频率在00:00:04 s 后出现明显偏移,并且文献[3]方法与文献[4]方法监测的频率不稳定,随着时间的推进出现较大的波动,说明所提方法的频率自动检测效果强于文献[3]方法与文献[4]方法的检测效果。

图5 各个方法的振动频率检测Fig.5 Vibration frequency detection of various methods
4 结语
针对检测时间长、信号采集效果差、频率自动检测效果差等问题,设计一种自组网通信下的机械臂关节振动频率自动检测方法。采集机械臂关节的振动信号,并应用混合检错校验模式剔除信号中的噪声,避免噪声对检测过程产生影响;应用主控制器模块提取信号的特征,联合振动频率测量仪,分析振动时间与振动次数,赋予检测过程的自动化属性,实现机械臂关节振动频率的自动检测,降低了频率检测时间的同时,在一定程度上提高了信号采集效果与频率检测效果。
