履带底盘式青贮收获机行驶性能的研究
2023-07-28潘伟阳李晓康侯晶涛梁宇凯李向阳
潘伟阳, 李晓康,2,3*, 孙 伟,3, 侯晶涛, 梁宇凯, 李向阳
(1.甘肃农业大学机电工程学院,甘肃 兰州730070;2.甘肃省机械科学研究院有限责任公司,甘肃 兰州730070;3.甘肃省草地农业机械重点实验室,甘肃 兰州730070)
青贮饲料因其本身含有丰富的蛋白质和脂肪,深受养殖户的喜爱。随着畜牧业的快速发展,对饲料的需求量也在持续地升高,因此对青贮收获机械的需求量也愈来愈大。与传统的收获技术相比,全株机械化收获工作效率可提高十几倍甚至几十倍以上,可以有效地节省劳动成本[1]。
我国丘陵山地可耕作地块为坡度不相等、形状不规则的中小型地块,加上基础设施薄弱、机耕道路少而狭窄等,作业时还面临着打滑、沉陷、田埂和沟壕阻挡等问题,使丘陵山区青贮收获机市场出现“无机可用”的现象,特别像云、贵、川等丘陵山地地区对青贮作物的收获还是以传统的人工收获为主。近年来虽然各大企业开始涉足青贮行业,但是由于起步较晚,缺乏先进的技术和理论基础,对适用于复杂地形收获机械的研究与日本、韩国相比还是有一定的差距[1]。因此,为了进一步提高青贮收获机的环境针对性与地形适应性,开展相应工况的坡地行走机理研究,并探讨关键参数对行驶性能的影响规律十分必要[2-4]。
以自主研发的青贮收获机为研究对象,建立爬坡、越沟、越障等典型工况力学模型,研究该机的行驶性能及影响因素;建立收获机多体动力学模型,分别在混凝土路面和粘土路面对模型的行驶性能进行仿真,分析仿真数据验证理论模型的准确性。
1 履带底盘式青贮收获机设计
1.1 设计指标
结合山地地区作业环境,确定该机主要技术指标为:(1)整机空载质量3 000 kg,满载质量3 500 kg;(2)在松软路面上有较好稳定性和通过性,接地比压<25 kPa;(3)收获工作时速度范围为2~4 km/h,最高行驶速度8 km/h;(4)具有较好的爬坡能力,空载最大爬坡角25°。
1.2 履带设计
考虑到收获机工作环境恶劣,履带容易受到磨损,因此要求履带必须有足够的附着能力和抗磨损能力。目前市面上广泛使用的橡胶履带有轮孔式、摩擦传动式和轮齿式。在考虑了其稳定性和经济性之后,采用轮齿式橡胶履带。
履带结构尺寸对行走性能具有很大的影响。因此,需要对青贮收获机履带的结构尺寸进行设计,履带结构尺寸参数主要有接地比压、履带板宽度b,履带接地长度L和履带轨距B等。根据经验公式[5]可得:
(1)
B=(0.25~0.3)L
(2)
(3)
式中:m为整机总重,kg;[P]为履带接地比压,kPa;g为重力加速度,取9.8。
1.3 轮系设计
1.3.1 驱动轮
驱动轮的功用是将传动系传来的动力传给履带,驱动轮和履带的啮合情况将影响动力传递的效率。依据JB/T 6682-2008《联合收割机橡胶履带系列参数》标准,可得驱动轮公式为:
(4)
Dg=DO-2F
(5)
Dd=DO+2H-5
(6)
式中:Do为驱动轮节线基准圆直径,mm;Dg为驱动轮齿根圆直径,mm;Dd为驱动轮齿顶圆直径,mm;t为履带节距,取90 mm;n为驱动轮齿数,选取齿数为8;H为履带厚度,取20 mm;F为履带传动平面到钢丝绳中心平面的距离,取12 mm。
1.3.2 支重轮
支重轮的功用一是用来支撑整机重量并将其传到地面上,二是通过夹持履带来防止履带横向滑脱。为了减少能量损失需要考虑支重轮工作时与履带之间的阻力,支重轮需要具有较小的滚动阻力。在混凝土路面行驶时,支重轮要承受重载和强烈冲击,还需要具有高强度和高耐磨度。根据经验公式,支重轮直径[6]为:
Dz=2.5t
(7)
1.3.3 张紧轮
张紧轮除了可以调节履带张紧度,还能起到限位作用。安装张紧轮时一方面要限制其垂直方向的位移,另一方面要保证前后方向有一定的位移行程,便于调整履带张紧力的大小。张紧力与履带节距之间的比值决定着履带卷绕时的冲击力,比值越大,冲击力越小[7]。
1.4 收获机整体结构
整机主要由履带底盘1、机身2、料仓3、抛料装置4、切碎装置5、割台6等组成,收获机作业时可一次性可完成青贮玉米收割、喂入、切割、抛料工作,整机结构如图1所示。

图1 履带底盘收获机三维模型
由于收获机工作环境崎岖多变,将底盘接近角和离去角设计为固定值,既可以保持车辆行驶的稳定性,又可以避免不必要的设计和制造成本。该收获机底盘由橡胶履带、驱动轮、支重轮、张紧轮、托带轮以及车架构成。参考上述经验公式,结合实际情况及整车总体设计要求,最终确定该收获机行走部分及整车基本参数如表1所示。

表1 青贮收获机基本参数
2 收获机直线行驶动力学分析
图2为斜坡行驶受力示意图,G为整机重力,N;Fz为地面对履带底盘整机的支撑力,N;Ft为履带底盘牵引力,N;Ff为履带与地面之间的摩擦阻力;Fw为空气阻力,N;Fi为坡度阻力,N;Fj为加速阻力,N;Fn为履带底盘内摩擦阻力,N。收获机在平坦路面行驶时,驱动轮沿顺时针转动,履带底盘式青贮收获机运动时所受总阻力为:

图2 斜坡行驶受力示意图
∑F=Ff+Fw+Fi+Fj+Fn
(8)
斜坡行驶时收获机重力沿坡道的分力表现为坡道阻力,即表达式为:
Fi=Gsinα
(9)
影响履带底盘与路面的摩擦阻力的因素很多,即与行走装置有关也与路面种类有关,如整机载荷、履带构造和材料、土壤粘聚力模量、土壤内摩擦模量等。有些因素在实际过程中难以获取,用理论计算的方法不实用。因摩擦阻力主要取决于履带车辆的整体质量,在工程上常可以利用简化公式进行估算斜坡行驶时履带与地面之间的摩擦阻力:
Ff=Gfcosα
(10)
式中:f为滚动摩擦系数,松软路面取0.10。
收获机底盘行走装置的内摩擦阻力可以根据经验公式进行估算[8]:
Fn=Gfncosα
(11)
其中:fn为内阻力系数,其取值范围为0.04~0.08。
加速阻力就是加速时需要克服其质量加速运动产生的惯性力,也称其为惯性阻力。为了更加直观地体现,在图2中将加速阻力作为阻碍收获机前进的力,其表达式为:
(12)
空气阻力可表示为收获机行驶时空气作用力在行驶方向上的分力,其表达式为:
(13)
式中:CD为空气阻力系数,取0.6~1.0;v为车速,km/h,A为迎风面积,即收获机行驶方向投影面积,m2。
将(9)(10)(11)(12)(13)代入到(14)中,可得收获机爬坡行驶时所受到的所有阻力和为:
(14)
当收获机平地直线行驶时,且收获机行驶速度较低,空气阻力和坡道阻力可忽略不计,则平地直线行驶时收获机运动时所受总阻力为:
∑F=Ff+Fj+Fn
(15)
收获机履带底盘行走装置的内摩擦阻力可以表示为:
Fn=Gfn
(16)
收获机履带与地面之间的摩擦阻力可表示为:
Ff=fG
(17)
将(12)(16)(17)代入(15)中可得平地直线行驶时收获机所有总阻力为:
(18)
如图3所示,建立平地行驶坐标系,以质心为坐标系原点,以收获机底盘前进方向为x方向,垂直于前进方向为y方向(向上为正)则;

图3 直线行驶受力示意图
Ft-Ff-Fn-Fj=0
(19)
驱动力可以表示为:
(20)
式中:Tt为作用于驱动轮上的转矩,N·mm;r为驱动轮半径,mm。
根据(16)(17)(19)(20)可得,该收获机平地直线行驶时的动力学表达式为:
(21)
3 收获机稳定性和通过性分析
由于丘陵山地地形复杂多变,需要收获机具有良好的行驶性能,本节将主要研究行驶过程中的稳定性和通过性。假设将机体行驶时受到的力分解为横向和纵向,即从收获机横坡行驶和纵坡行驶两种工况下分别讨论其行驶稳定性;从收获机翻越垂直壁和跨越沟壕工况下分别讨论其通过性。
3.1 稳定性分析
3.1.1 纵坡行驶稳定性分析
机体纵坡行驶稳定性主要评价指标包括极限坡度角和极限下滑角。收获机上、下坡时的稳定性与自身重力、履带和地面之间的摩擦力以及坡地支撑力的大小有关[9-10],底盘上、下坡受力分析如图4所示。其中:a为重心至后端支重轮中心的横向距离,mm;b为重心至前轮中心的横向距离,mm;h为地面到收获机重心的垂向距离,mm;FZ1为路面支撑力,N。

图4 收获机纵坡行驶受力示意图
当收获机处于稳定上坡状态时,对最后一个支重轮取力矩方程得:
FZ1s-Gacosα+Ghsinα=0
(22)
由于受力平衡,可得:
FZ1=Gcosα
(23)
将(22)代入式(23)得:
(24)
要保证不发生倾翻必须满足s>0,随着坡度不断变大,当机体发生倾翻时,此时的坡度就是极限坡度,即s=0,可得:
αcosα-hsinα=0
(25)
即纵向上坡时极限倾翻角为:
(26)
同理可得纵向下坡时极限倾翻角为:
(27)
极限下滑角是收获机在坡道上驻车不产生滑动的最大坡度角,极限下滑角计算公式为:
αφ=arctanφ
(28)
式中:φ为路面附着系数。
经过简单计算,收获机在各种路面上的极限下滑角度如表2所示,在保证安全的情况下收获机纵坡行驶极限角度为[11]:

表2 不同路面上的极限下滑角
α纵max=min(αx,αs,αφ)
(29)
3.1.2 横坡行驶稳定性分析
收获机横坡行驶稳定性评价指标主要有横坡行驶极限坡度角和横向侧滑角等方面[12]。收获机在横坡行驶稳定性同样也与自身重力、履带和地面之间的摩擦力以及坡地支撑力的大小有关,受力分析如图5所示。

图5 横坡行驶收获机受力示意图
当机体在坡地上发生侧翻,此时坡角为横坡行驶极限坡度,由于受力平衡,根据平衡方程可得:
FZ3B-Gcosα(0.5B-e)+Ghsinα=0
(30)
式中:FZ3为左侧履带地面支撑力,N;e为重心到收获机横向中心的横向距离,mm。
此时可得左侧地面支撑力为:
(31)
收获机发生侧翻临界条件是FZ3=0,并假设e=0,可得极限坡度为:
(32)
收获机在横坡驻车时不发生滑移的坡角为横向极限滑移角αh,由力平衡方程式可得:
Gsinα=f1+f2
(33)
Gcosα=φz(f1+f2)
(34)
式中:φz为坡地上的横向附着系数;f1为左侧履带与地面之间横向附着力,N;f2为右侧履带与地面之间横向附着力,N。
横坡驻车不产生滑移现象条件为:
Gsinα≤φzGcosα
(35)
αh=arctanφz
(36)
可见,横向极限滑移角与坡地上的横向附着系数φz有关,随着横向坡度的增加,到达一定角度后收获机会出现滑移现象,影响正常行驶。经过简单计算,收获机在各种路面上的横向极限滑移角如表3所示。所以在保证行驶安全情况下收获机横坡行驶极限角为:

表3 不同路面上的横向滑移角
α横max=min(αε,αh)
(37)
3.2 越障通过性分析
3.2.1 翻越垂直壁性能分析
由于丘陵山地地形复杂,收获机经常会在坡地上工作,本节将研究坡度、极限仰角和越障高度之间的关系。收获机在翻越垂直壁时其翻越过程包括三个阶段[13-14]:(1)第一阶段指前轮与垂直壁边缘产生接触时,履带在驱动轮作用下转动,直至履带接地段与垂直壁接触。(2)第二阶段指随着收获机不断前进,履带支持段不断与垂直壁接触,底盘与地面夹角逐渐增大,收获机质心呈现缓慢向前且上升运动趋势,直至重心与垂直壁的垂直面重合,此时也称为临界状态,如图6所示。(3)第三阶段指从底盘落到垂直壁上表面到越障完成。

图6 坡地越障示意图
通过几何关系分析可得垂直壁高度H与收获机结构参数之间的表达式为;式中:θ为底盘仰角,°;r1为后支重轮半径,mm。

(38)
当履带底盘处于临界平衡状态时:
FZ5[a-htan(θ-α)]+(h-r1)Gsinθ-αGcosθ=0
(39)
式中:FZ5为支撑力。
此时收获机可翻越的障碍物高度达到临界值,临界条件为FZ5=0,代入上式得:
(h-r1)Gsinθ-aαGcosθ=0
(40)
由此可得底盘极限仰角为:
(41)
通过上式计算得到底盘最大仰角为52°,为了更加直观地展现俯仰角和坡度角变化对爬坡性能的影响,取仰角范围为[0,80],斜坡角度为[0,30],通过matlab数值分析得到俯仰角、坡度和越障高度关系曲线,如图7所示。通过上述分析可以得到的结论是:当收获机参数确定后,翻越垂直壁极限高度只与坡地角度和底盘极限仰角有关;当坡度一定时,翻越垂直壁极限高度随机体的仰角增大而增大,到达极限仰角后随仰角增大而减小;当仰角一定时,极限越障高度随着坡度增大而减小;相同越障高度下,随着坡度增大,极限仰角随之增大,但不同坡度对应的极限高度几乎一致。

图7 俯仰角、坡度与越障高度关系示意图
3.2.2 跨越沟壕性能分析
丘陵山地履带底盘跨越沟壕的能力主要指标为通过沟壕的最大宽度,其关键的边界线为沟壕两侧的边界线。要求收获机底盘在跨越沟壕时,其重心越过沟壕近侧边缘线时底盘前端要接触在远侧边缘线上,当底盘重心跨过远侧边缘线时,其后端不能与近侧边缘线脱离接触,这说明底盘重心位置决定了能通过沟壕的最大宽度[15]。本节将研究该收获机在坡地上的最大跨沟宽度以及分析不同坡度对跨沟性能的影响。
收获机跨越沟壕过程大体可分为三个阶段:(1)第一阶段,收获机在坡道上缓慢行驶,底盘前端逐渐进入沟壕,随着底盘重心逐渐越过近侧边缘线,底盘前端向沟内倾斜,如果沟壕太宽,机体前端将会下沉;(2)第二阶段,收获机继续缓慢前进,当前端与远侧边缘线接触,底盘前端逐渐抬起,车体姿态由前倾过渡到后仰;(3)第三阶段,机体后端完全驶离近侧边缘线,继续前进至机体完全越过沟壕。在此过程中极限位置在重心与近侧边缘线和远侧边缘线的重合位置上,在此针对上、下坡分别讨论。图8给出了上、下坡机体能够跨越沟壕最大宽度的示意图。

图8 收获机上、下坡越沟示意图
由图a和图b可见,上坡时能够跨越沟壕最大宽度为:
Ls1=(b+htanα)
(42)
Ls2=(a-htanα)
(43)
Ls=min(Ls1,Ls2)
(44)
由图c和图d可见,下坡时能够跨越沟壕最大深度为:
Lx1=(b-htanα)
(44)
Lx2=(a+htanα)
(45)
Lx=min(Lx1,Lx2)
(46)
则,该底盘在坡地上能够跨越沟壕的最大宽度为:
Lmax=min(Ls,Lx)
(47)
由此可见,坡度的大小很大程度上决定了最大沟壕跨度。经数值分析得到不同坡度上极限越沟宽度变化曲线,如图9所示,可知:随着坡度增大,收获机所能跨越的沟壕极限宽度越小,越沟能力随之减弱。

图9 坡度与极限越沟宽度关系曲线
4 仿真分析
结合实际情况,利用recurdyn多体动力学仿真软件分别对包括收获机直线行驶、横坡行驶、纵坡行驶、越障行驶及越沟行驶在内的五种不同工况下进行仿真分析,验证理论分析结果。
4.1 稳定性仿真
4.1.1 平地直线行驶偏移量
对该履带底盘式收获机分别在硬质(混凝土)路面和软质(粘土)路面上的直线行驶偏移量进行仿真分析。仿真环境设置如下:将道路长度设置为30 m,以1.2 m/s的速度匀速向前行驶,偏移量曲线如图10所示。

图10 直线行驶偏移量曲线
可见,在硬质和软质路面上收获机的最大侧向偏移量分别为0.65 m和0.82 m,偏移率分别为2.16%和2.73%,根据GB/T 15370.4-2012《农业拖拉机通用技术条件 第四部分:履带拖拉机》,农用拖拉机在干硬平整、纵横坡度不大于1%路面上的跑偏率不得大于6%,满足国标要求[16]。
4.1.2 横坡行驶
前面得出了不同路面下的平地直线行驶偏移量的差距,接下来研究相同路面下不同坡度对行驶偏移量的影响。考虑到收获机经常在丘陵山地路面行驶,因此选取软质路面作为研究对象,分别对收获机在15°、25°、30°坡道上的横坡行驶进行仿真分析,收获机在软质路面上的横向滑移量曲线如图11所示。

图11 软质路面横坡行驶滑移量
从图11可以看出:在软质路面上,15°和25°横坡上滑移量分别为1.259 m和1.761 m,滑移率分别为4.19%和5.87%,收获机在30°横坡上行驶时出现了严重的横向滑移,已无法正常行驶。前述软质路面下的横向极限下滑角理论值为31.9°,理论分析和仿真相对误差为6.33%,验证了极限下滑角理论计算的有效性。同时,考虑到行驶安全性,收获机应在小于25°的横坡上工作。
4.1.3 纵坡行驶
以理论计算得到的最大爬坡度为参考,以30°坡度为研究对象,分析不同路面、不同速度对爬坡能力的影响。仿真环境设置如下:收获机在0~2 s内分别加速至1.8 km/h、3.5 km/h、5.4 km/h后匀速行驶。得到不同速度、不同路面爬坡俯仰角变化曲线,如图12所示。
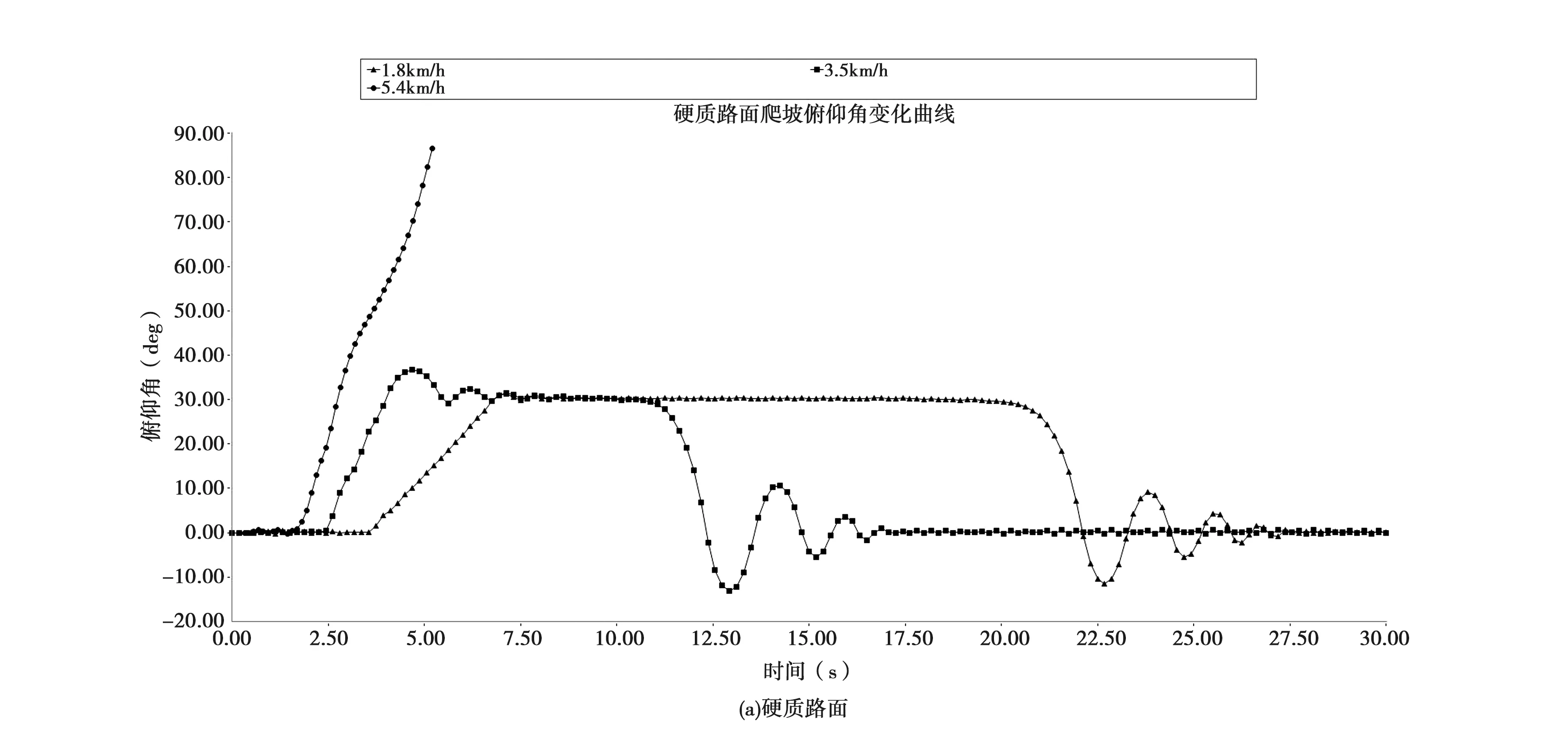
图12 不同路面上以不同速度爬坡俯仰角变化曲线
仿真分析过程如下:以在硬质路面上Ⅰ档行驶为例,收获机在0~2 s内加速至1.8 km/h, 2~4 s收获机保持平地匀速行驶,此过程中俯仰角无太大波动。4~20.7 s收获机先从平地过渡到斜坡,俯仰角逐渐变大,再保持爬坡行驶,俯仰角稳定在30.8°左右。20.7~28 s收获机完成爬坡动作并在上水平面上行驶,此阶段俯仰角变化范围为-11°~30.8°,随后恢复至平地稳定行驶状态。
由图12中的俯仰角变化曲线可知:硬质路面和软质路面均能攀爬30°斜坡,速度越高爬坡速度越快,但俯仰角波动范围大,在两种路面上以5 km/h速度爬坡时收获机均出现倾翻,因此爬坡时优先选择低档行驶。对比图12(a)和(b)均以1.8 km/h的速度爬坡可知:在收获机从爬坡过渡到水平行驶过程中,当重心越过上坡角垂直线后,机体前端逐渐下落,俯仰角变小,由于软质路面可塑性要大于硬质路面,能够吸收一定程度的冲击力,所以俯仰角波动程度明显小于硬质路面。由前述理论计算所得硬质路面和软质路面的极限下滑角分别为34.81°和34.99°,以上述仿真为基础,经过进一步地仿真得出硬质和软质路面最大爬坡度分别为32°和34°,相对误差分别为8.7%和2.9%。
综上所述可得:在相同坡度下,低速档行驶比高速档爬坡时车辆稳定性要好,相同行驶速度下,软质路面比硬质路面爬坡稳定性要好。
4.2 通过性仿真
4.2.1 越障行驶
为研究坡度对越障性能的影响,在软质路面上通过仿真分别得到0°、5°、10°、15°、20°和25°斜坡上可翻越最大垂直障碍物的高度,如表4所示。通过对比图7俯仰角、坡度与越障高度关系曲线可得仿真极限越障高度与理论分析极限越障高度数据误差较大,这是由于理论分析中没有考虑土壤的机理和特性,但在仿真结果中随坡度增大两种路面上的越障高度均逐渐变小,与数值分析后得到的变化规律相同。同时为保证行驶安全性,最大越障高度不仅取决于极限仰角,还受到前轮高度、割台前端最大离地高度以及车体后端离地高度等因素限制。

表4 不同路面和坡度下的越障高度
为了更加直观地观察到不同土壤对越障性能的影响,现将仿真环境设置如下:坡道角度为0、越障高度为220 mm。得到两种路面下的越障俯仰角变化曲线,如图13所示。通过分析曲线得出以下结论:在坡道角度、越障高度、行驶速度等其他条件相同的情况下,越障过程中硬质路面俯仰角的波动均比软质路面要大,其最大仰角分别为14°和9°,这是因为硬质路面刚度较大,履带与路面的冲击较大;收获机在软质路面上行驶时,障碍物的边缘会被逐渐压实,质心俯仰角会变小,从而使得收获机底盘与障碍物两者的冲击力减少。由此可见,软质路面上的越障能力要优于硬质路面。
4.2.2 越沟行驶
为研究不同坡度对越沟性能的影响,在软质路面上通过仿真分别得到0°、5°、10°、15°、20°、25°和30°斜坡上可越过最大沟壕宽度,如表5所示。可以看出,坡度对越沟宽度影响变化规律与图9所示的数值分析规律一样,坡度越大,可跨越的极限沟壕宽度越小。同样为了保证行驶安全,最大越沟宽度也受前轮高度、割台前端最大离地高度以及车体后端离地高度等因素限制。

表5 不同路面和坡度下的极限越沟宽度
为了更加直观地观察不同土壤对越障性能的影响,现将仿真环境设置如下:坡道角度为0、沟壕宽度为600 mm。得到两种土壤下的越障过程中俯仰角变化曲线,如图14所示。1 s附近的俯仰角为收获机重心越过近侧沟壕垂直壁到履带前端接触到远侧沟壕垂直壁的过程,此时俯仰角变化逐渐变大,由于软质路面沟壕边角会被机体压塌、压实,此过程中软土路面上的俯仰角要比硬土路面上的俯仰角变化更早、范围更大。在收获机履带攀爬远侧垂直壁到重心与远侧垂直壁重合的区间里,俯仰角持续变大,直至最大值。同样,软土路面上远侧垂直壁也会被压塌、压实,导致此过程中软土路面俯仰角变化范围要比硬土路面更大。

图14 两种路面上越沟俯仰角变化曲线
综合上述越沟仿真结果可知:同一路面下,随着坡度增大,收获机能够跨越的沟壕宽度越小;同一坡度下,硬质路面的越沟通过性比软质路面好,因为软质路面具有更高的可塑性。
5 结论
本文分别对丘陵山地青贮收获机的直线行驶、横坡行驶、纵坡行驶、翻越垂直壁和跨越沟壕五种工况行驶过程建立力学模型,并利用recurdyn进行多体动力学仿真,得出以下结论:
(1)硬质和软质两种路面下的平地直线行驶偏移量分别为2.16%和2.73%,硬质路面横向稳定性较好;
(2)软质路面横坡行驶极限角理论值与仿真值误差为6.33%,在15°和25°横坡上滑移量分别为4.19%和5.87%;
(3)两种路面下纵坡行驶极限角理论值与仿真值误差为8.7%和2.9%,同一坡度下低速爬坡比高速爬坡稳定性要好;
(4)在0°、5°、10°、15°、20°和25°软质路面上极限越障高度和极限越沟宽度分别为363 mm和721 mm、315 mm和693 mm、268 mm和665 mm、220 mm和631 mm、171 mm和603 mm、124 mm和581 mm,越障高度和越沟宽度都随坡度的增加而减小,均与数值分析所得规律一致。在同一坡度下软质路面的越障通过性要比硬质路面好,而越沟通过性恰好相反。
根据以上数据可得,理论分析和仿真分析吻合度较高,说明本文所建立的力学模型是有效的、可信的。
