基于仿真技术的机械臂设计应用研究
2023-07-28袁海林
袁海林,陈 钧
(中国电子科技集团公司第二十八研究所,江苏 南京)
引言
在科学技术日新月异的今天,机械设计制造对于一个国家的经济、国防以及社会运行都有着极大的意义,包括各类机电产品的开发以及轻工业、重工业的持续运行,都离不开良好的机械设计。而在计算机技术和信息化技术日益普及的当下,机械设计与制造中各种可能出现的问题在如今有了更好的解决方法[1]。仿真技术作为一种虚拟样机技术,可以在传统机械设计的基础上加入更多大数据分析方面的内容,通过解决大量的模拟、复算、统计在机械设计之中遇到的问题,就可以在设计中加入更多的设计元素,建立模型、改进模型。所以我们认为,基于仿真技术的机械设计应当是未来趋势。而机械臂作为一种应用较为广泛的工业产品,在各类轻、重工业中也发挥着较大作用,如何通过最新的计算机技术、信息技术改良机械臂的设计,也是研究人员需要着重考虑的问题之一[2]。
1 当前仿真技术的描述
作为一种虚拟系统对运行原理和控制技术等深入解读,再通过计算机设备或者专用仪器进行相关实验,能够充分了解运行动态成本的技术,仿真技术在如今的工业领域特别是机械设计领域有着较大的作用。在机械设计领域中,运用仿真技术可以更好的提升机械设计的精度以及所生产出产品的质量。通过技术的不断革新,目前通过仿真技术进行机械设计已经成为主流,不仅可以模拟出产品构型,还可以对产品的用途进行模拟,因为大数据的加入,现如今仿真技术已经有了更多的集成化特征,各类要素的完备让机械设计不再仅仅依靠于经验,在系统中的大量模拟使用对于产品高质量的搭建具有较为重大的意义。
2 不同工业机械臂的分类
作为一种工业化的拟人机器,机械臂在各行各业都得到了广泛应用,一般而言机械臂主要有手臂、手腕、手三个构件组成,不同生产任务导致机械臂的复杂程度不同,一般可以分为如下的几种[3-8]。
2.1 直角坐标型机械臂
直角坐标型机械臂如图1 所示,一般而言,直角型机械臂拥有结构简单、易于控制等特性,在机械抓手上装有不同的装置可以帮助机械臂完成诸如搬运、装车、包装、焊接等基础却较为精密的工作。其驱动方式一般也较为简单,一般是通过丝杆驱动、齿轮同步带驱动和直线电机驱动等。
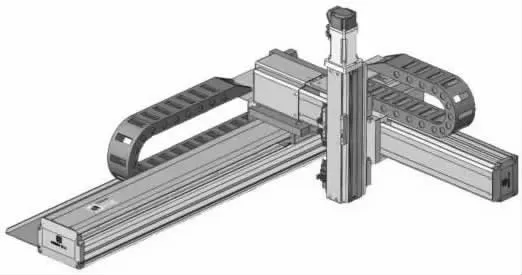
图1 直角坐标型机械臂实物
2.2 圆柱坐标型机械臂
作为一种较为复杂的机械臂结构,一般是由多个旋转运动和多个直线运动的结构组成。机械臂的自由度决定了整个结构装置的灵活度,也影响着机械装置完成不同任务的多样性。图2 是一个圆柱坐标型机械臂的3D 模型,在完成复杂程度较高的作业中通常也会让机械臂代替人工作业以保证产品的质量,圆柱型机械臂驱动方式与直角坐标型机械臂雷同。

图2 圆柱型机械臂3D 模型
2.3 关节型机械臂
关节型机械臂是现今复杂度最高、应用最为广泛的一种机械臂,因其结构与人类关节高度相似而得名,一般具备4 到6 个自由度。图3 是一种典型的6个自由度的机械臂,6 个关节全部为转动关节,其设计思路也让该机械臂的小臂与大臂可以达到完全伸展,随着控制算法的不断提升,该机械臂可以完成精密芯片的点焊、工业设备装配等一系列具有较高难度的工作。那么机械臂的设计在发展过程当中该如何与计算机技术相结合呢? 下文将以掘进式机械臂为例,基于仿真技术对机械臂的设计予以介绍。
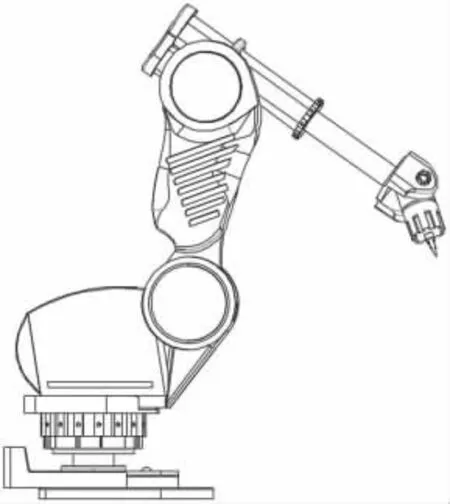
图3 关节型机械臂实物
3 基于仿真技术的掘进型机械臂设计
3.1 掘进型机械臂的结构组成
掘进式机械臂是一种较为复杂的设备,其由摆动油缸、回转驱动装置、动臂、动臂油缸、中间臂、中间臂油缸、小臂、小臂油缸、挖斗油缸、挖斗左右连杆、挖斗推杆、快换装置和铲斗/破碎锤/挖斗等结构组成。通过三节机械臂在各个油缸支持下协调伸展转动,可以帮助掘进式机械臂在较为窄小的空间内进行多角度、多方位地破碎、修复、开槽、平整等掘进作业[9-13]。
3.2 掘进型机械臂的结构特点
3.2.1 机械臂具有较好的折展性
机械臂一般采用3 节臂结构,通过较好的臂长配比使其具有良好的折展比,在小空间内作业也可以极大的保证工作效率,让各个臂关节能够更加灵活地收缩、伸展[14]。
3.2.2 机械臂功能更加完备
为适应现场工作需要,将机械臂小臂前端设置为快换装置,结合任务需求快速更换挖斗、铲斗、破碎锤等部件,降低人工参与度,可以大幅减少成本与劳动支出。
3.2.3 机械臂结构更加合理
由于工作环境较为特殊,机械臂需要具有较好的收缩性能,通过机械臂的折叠改变设备重心,达到收缩后整机尺寸减小的的同时保留掘进的稳定性。
3.2.4 机械臂具有良好的形态改变能力
机械臂良好的收缩性能决定了可以根据现场条件调节动用机械臂节数,进行小范围的调整姿态,改变工作环境,以提升机械臂的使用效率[15]。
3.3 掘进型机械臂的静力学分析
通过三维建模软件辅助设计,可以建立掘进式机械臂的模型。依据前人资料,通过对模型的材料进行重新定义,设定机械臂整体强度及承载能力屈服极限为750 MPa。通过对材料弹性模量设定为187 000 MPa、密度为8.01 t/m3、泊松比为0.35,机械臂整体质量为1 600 kg。对机械臂模型进行网格划分,采用手动精细的网格划分方法来增加网格划分质量,从而提高求解结果的精度。设置单元尺寸为0.2 cm,网格单元数共计110 000,节点数共计50 000。
在设定的基础上对机械臂的有限元模型施加约束并逐步添加载荷。为保证机械臂的可靠性,模拟其在挖掘时极限工况下的应力分布及变形情况。分别在动臂、动臂油缸与回转驱动装置铰接处添加约束,对挖斗顶端施加20 000 牛的阻力,有限元分析前处理完成后得到机械臂的应力、总变形分析云图,如图4、图5 所示,最大总变形为6.32 mm,最大应力为14.77 MPa,此应力变化低于设计极限值。因此认为结构强度符合机械臂的使用要求,不会出现在应力作用下被破坏的情况。

图4 应力分析云图(来源前人资料)
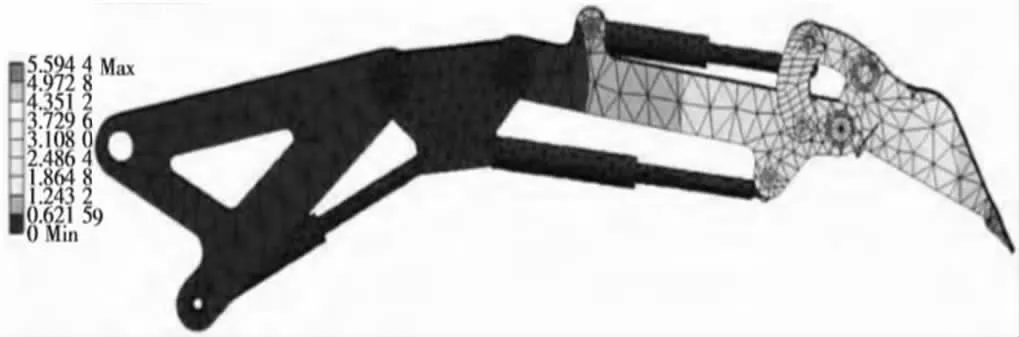
图5 总变形分析云图(来源前人资料)
3.4 掘进型机械臂的模态分析
掘进型机械臂采用较为标准的悬臂梁结构,自身体积大、跨度大,自振对其影响大,为提高结构的稳定性,需对其进行模态分析,判断其薄弱位置,改变并优化设计尺寸,完善结构,做出机械臂前三阶模态分析的振形云图。机械臂的固有频率为12~90 Hz。一阶振形沿Z 轴方向弯曲,振形最大变形量发生在铲斗处;二阶、三阶振形均沿Y 轴方向弯曲,振形最大变形量发生在小臂油缸联接耳处。
4 结论
通过以上机械臂,特别是掘进型机械臂与仿真技术的结合,我们认识到仿真技术在机械设计领域的巨大作用。伴随着经济社会的不断发展与进步,仿真技术其独有的模拟程度高、问题整改迅速、试验成本低等特点在各行各业也都得到了广泛应用。对于掘进型机械臂而言,基于大数据的统计与仿真技术的模拟,通过二维、三维软件成图将更有利于缩短我国机械设计制造周期、提升我国机械产品的质量,并且将继续推动未来机械设计领域的健康发展。