考虑驾驶人视觉搜索能力的雨天公路限速设计
2023-07-26王琳虹李洪涛李若楠
王琳虹 李洪涛 李若楠
(1.吉林大学 交通学院,吉林 长春 130022;2.吉林大学 生物与农业工程学院,吉林 长春 130022)
降雨会不同程度地降低道路能见度和摩擦系数,在干扰驾驶人观察前方道路交通状况的同时增加了车辆的制动距离[1],进而对公路通行效率和交通安全产生负面影响[2]。早期研究通过统计事故率分析降雨对交通安全的影响。宁贵财等[3]对我国2005—2014年6种常见不良天气下发生的交通事故进行了统计,结果表明降雨天气事故数占86.5%,受伤人数占86.38%,死亡人数占81.86%,经济损失占77.8%。此外,Hwang等[4]分析了降雨天气下的公路事故影响因素,发现车速过高是导致雨天交通事故的主要原因。由上述统计结果可知,雨天交通事故发生频率最高且事故造成的人员伤亡和经济损失最多,通过降低车速可有效提高降雨天气下的交通安全水平。
随着研究的深入,学者们开始探究降雨量和车速对驾驶人产生影响的内在机理,进而确定不同降雨强度下的合理限速值,相关研究可分为两方面。一方面是通过调查雨天环境下道路交通流参数,建立降雨量与车辆行程速度的关系模型,进而提出不同降雨强度下的限速控制方案。Wang等[5]根据降雨量和高速公路的实时交通流状态,以事故率最小为目标,以限速为约束条件,建立了雨天公路隧道入口动态限速控制优化模型。Zhang等[6]在调查雨天高速公路交通流特征的基础上,考虑主路限速对安全合流的影响,提出了一种基于动态交通流元网模型的雨天高速公路主路限速控制方法。Wang等[7]以历史平均车速、交通量和降雨强度作为输入,利用深度径向基网络预测平均车速的波动趋势,并提出了基于平均车速的高速公路风险评估方法,采用第85分位预测车速作为限速值来降低高速公路行车风险。刘芳丽等[8]基于快速路气象数据和交通流数据,通过回归分析方法建立了降雨量与平均车速、交通流量之间的二元线性模型。马筱栎等[9]基于公路的天气数据、道路线形数据和车速数据,利用多层线性模型分析了不同线形路段下降雨对车速的影响。何雅琴等[10]对上海延安路高架的实测交通数据和小时降雨量数据进行匹配分析,以Greenshield经典V-K模型为基础,构建了速度-密度-降雨量的三维模型。
另一种研究思路是根据雨天道路能见度和摩擦系数,结合车辆动力学理论建立限速模型。Chu等[11]以降雨强度、道路坡度和道路抗滑性能作为输入,建立降雨天气下道路有限元抗滑能力模型,最后通过制动距离与道路抗滑能力值计算了限速值。乔建刚等[12]在高速公路雨天行车安全性研究中提出,将雨天高速公路小客车的轮胎临界划水速度作为限速设计依据。方成等[13]提出一种考虑降雨程度、道路线形和行车速度的小客车行车风险量化方法,建立了小客车雨天行车最大侧向偏移量与行驶速度的关系模型,并提出了雨天限速建议。此外,他们还基于雨雾作用机理,以天气信息、道路参数、车辆状态作为系统输入,以停车视距、防侧翻侧滑为边界约束,构建了车载端和路侧端协同的行车诱导系统。实车试验表明该诱导系统模型构建合理,并且能够计算雨天的合理限速值[14]。
综上所述,目前的研究主要是基于交通流状态和车辆运行参数建立雨天限速模型,然而公路路侧需要设置交通信息标牌,以帮助驾驶人提前获得提示信息或危险警示,降低行车风险。雨天行车时,空气中下落的雨线以及在车窗形成的雨帘都会对驾驶人的视线产生干扰,如果以较高的车速行驶,驾驶人将难以准确识别路侧信息并采取正确措施,进而影响行车安全性。因此在建立降雨量与公路限速的匹配方案时应充分考虑驾驶人对路侧信息的视认特性。然而此前的研究并未针对降雨量和车速对驾驶人视觉搜索行为的影响机理进行深入讨论,缺少在公路环境对不同降雨量下驾驶人视认特性表征参数的量化研究。
为解决雨天行车时,由于车速过高导致驾驶人无法准确识别路侧交通信息的问题,本研究以不同降雨强度和车速下驾驶人对路侧信息的视觉搜索行为作为对象,在此基础上设计考虑驾驶人视觉搜索能力的高速公路限速方案。首先基于注意分配理论选择驾驶人雨天行车过程中的外部环境指标和视觉认知指标,并结合Fisher判别理论建立驾驶人视觉搜索能力量化模型。然后利用模拟驾驶试验平台采集不同雨量和车速下的驾驶人眼动数据和车辆运行数据,并对视觉搜索能力量化模型进行验证。最后分别对基于停车视距的限速方案和基于驾驶人视觉搜索能力的限速方案进行对比分析。研究成果可为高速公路可变限速控制提供理论依据。
1 雨天驾驶人视觉搜索能力量化模型的建立
视觉搜索能力是评价驾驶人在行车过程中能否及时发现视觉信息的能力[15]。当驾驶人对道路交通信息进行视觉搜索时,由于各类信息的重要程度不同,驾驶人需要进行信息加工,而注意是人类加工信息时的一项重要心理调节机制,它能对有限的视觉资源进行合理分配,进而使感知具备选择能力[16]。现有研究表明,注意可通过两种方式被引向观测目标,分别是自上而下的内源性注意和自下而上的外源性注意[17],其中内源性注意是驾驶人依靠驾驶经验和主观期望形成自主分配的注意,外源性注意是由外部因素对驾驶人的客观刺激所引发的注意[18]。因此在建立驾驶人视觉搜索能力量化模型时,应同时考虑外部环境因素和驾驶人视觉搜索行为对视觉搜索过程的影响。
1.1 视觉搜索能力量化指标的选取
1.1.1 外部环境指标量化
本研究采用车速v和降雨强度IR作为外部环境因素。其中车速可利用车速传感器获取。雨天行车时驾驶人受雨滴下降和挡风玻璃积水等因素影响,导致道路前方视野模糊不清,因此可以根据雨天场景图像的清晰度表征降雨程度。在数字图像处理中,图像清晰度的计算方法包括灰度方差算法、灰度差分平方和方差算法、Brenner函数、Roberts梯度和、拉普拉斯梯度和等。其中Brenner函数具有计算量小且对图像清晰度量化效果好的优点,使该方法在工程实践中得到广泛应用。因此本研究采用Brenner梯度评价函数[19]计算图像清晰度,进而量化降雨强度。
首先采用由R(红)、G(绿)、B(蓝)三原色组成的图像像素值(xg,yg)作为输入,将雨天场景图像转化为灰度图像f(xg,yg)。由于人眼对各种颜色的敏感度不同,因此对R、G、B三分量赋予不同的权值,然后进行加权平均可以得到较合理的灰度图像。根据此前的研究结果,一般将R、G、B的权重依次设置为0.299、0.587和0.114,上述权重值是在可见光谱的范围内,通过统计人类视觉系统的相对亮度灵敏度在不同波长上的分布确定的[20]。通过上述分析得到f(xg,yg)的计算公式为
然后计算图像清晰度。由于采用的Brenner函数是通过计算横向相邻的两个像素单元灰度差的平方和来量化图像清晰度,则尺寸为M×N图像的清晰度D计算公式为
在计算出各类雨天场景图像清晰度的最大值Dmax和最小值Dmin后,对原始雨天场景图像清晰度值做归一化处理。此外,由于降雨强度越大,图像清晰度越低,因此在0~1范围内对清晰度的归一化结果进行反向映射,最终得到降雨强度IR:
1.1.2 视觉搜索指标量化
当驾驶人进行视觉搜索任务时,驾驶人的眼球运动会对视觉搜索能力产生较大的影响[21],因此本研究采用眼动数据作为视觉搜索指标。利用眼动数据研究驾驶人注意分配过程前,需要对驾驶人视野进行兴趣区域(AOI)划分。首先,根据眼动仪记录的驾驶视频中场景结构,将驾驶人视野中的情景划分为多个区域。本研究将驾驶人注视兴趣区域分为7个区域,分别是:道路右内侧、道路右外侧、道路前方、道路远方、仪表盘区域、道路左内侧和道路左外侧。然后采用K均值聚类算法,以驾驶人在视觉搜索过程中的注视点坐标作为指标,分别对每个驾驶人在不同降雨程度和车速场景下视野图片中的AOI边界进行调整。具体过程可分为以下4个步骤:
1)从一次试验采集的注视点样本中随机选取的7个坐标数据作为初始聚类中心Zj(xj,yj)(j=1,2,…,7);
2)利用式(4)计算注视点样本中各点(gx,gy)与上述聚类中心的欧氏距离,并按照最小距离分配准则,将各点分到与其距离最近的聚类中心Zj所归属的类别;
3)根据步骤2)划分好的类别重新计算迭代后新的聚类中心Z'j;
4)判断聚类中心是否发生变化,若Z'j≠Zj,则返回步骤2);若Z'j=Zj,表明算法收敛,则结束计算并输出聚类结果。
以中雨场景为例,根据上述流程完成的AOI划分如图1所示。
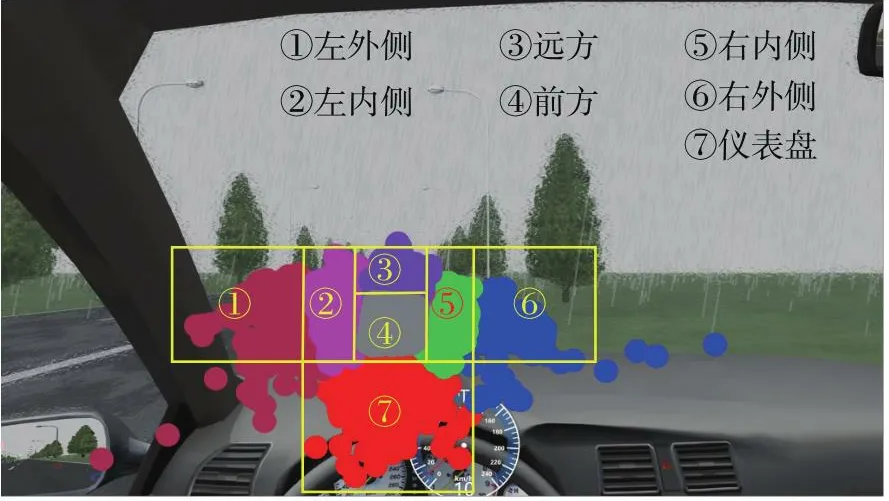
图1 AOI划分示意图Fig.1 Schematic diagram of AOI division
影响驾驶人对观测目标视觉搜索能力的主要因素是视觉搜索范围和视觉搜索效率[22]。本研究采用视觉搜索过程中视线角度的平均值表征驾驶人的视觉搜索范围。眼动仪采用三维空间中的坐标确定驾驶人的视线向量,因此可以利用视线向量在三维空间中的坐标(Xt,Yt,Zt)与驾驶人在无任务驱动时的视线向量坐标(X0,Y0,Z0),计算两个视线向量之间的夹角作为驾驶人的视线角度θ,具体计算公式为
驾驶人在行车过程中执行视觉搜索任务时,当对某一AOI注意分配较高时,代表驾驶人对该AOI的关注程度越高,驾驶人也更容易从该区域获取视觉信息[23]。因此本研究采用第k个AOI注视分布比例Pk(k=1,2,…,7)量化驾驶人对各AOI的关注程度,其中Pk为第k个AOI内注视点数目与全部兴趣区域内注视点总数的比值。并采用由驾驶人对特征AOI注视分布比例矩阵P=[Pz](z∈k)构建的注视效度FV表征驾驶人对观测目标的视觉搜索效率。其中特征AOI一般取驾驶人关注程度较高,且会对观测目标的搜索结果产生显著影响的区域。
1.2 基于Fisher判别分析的视觉搜索能力量化模型建立
本研究将驾驶人的视觉搜索能力VS分为“识别(1)”和“未识别(0)”两类。为确保驾驶人在准确识别路侧信息后车辆有足够的制动距离,采用车辆完全制动时车头与路侧信息之间的垂直距离Lv对VS进行分类,判别依据为
式中,d为车辆完全制动时车头与路侧信息之间的临界安全垂直距离,建议取值5 m。
为将外界环境因素和驾驶人视觉认知指标同视觉搜索能力构建联系,本研究采用Fisher判别分析方法对驾驶人的视觉搜索能力进行预测。该方法的基本原理是:首先将高维数据点投影到低维空间,投影的原则是将不同类别数据分离;然后根据类间样本距离最大、类内样本距离最小的原则计算判别函数;最后利用判别函数对新样本进行分类[24]。具体计算过程如下:
(1)设“识别”和“未识别”这两类样本总体分别为T1和T2,由于“识别”和“未识别”样本中输入值均由车速v、降雨强度IR、驾驶人视线角度θ以及注视效度FV这4种变量组成,因此T1和T2均可采用每种类别下的由4种变量构成的矩阵来表达,即Ti=[vi,IRi,θi,FVi](i=1,2),其中,vi是由v构成的数据集,IRi是由IR构成的数据集,θi是由θ构成的数据集,FVi是由FV构成的数据集。从Ti(i=1,2)中分别抽取Ni个样本作为训练样本集E=[ei];
(2)分别利用式(7)和式(8)计算ei的平均值向量ui和E的平均值向量U;
(3)分别利用式(9)和式(10)计算样本“类内离散度”矩阵S和样本“类间离散度”矩阵C;
(4)令J=WTCW-λ(WTSW-1)。其中,λ是方程的最大特征值,W是λ所对应的特征向量。求解式(11)所示的偏微分方程,计算W。
(5)构建判别函数ψ=WTX。分别将“识别”和“未识别”两个类别中的训练集样本X代入判别函数中,计算每个类别中的综合指标ψi,并利用式(12)计算分类临界值β。
(6)从Ti中分别抽取mi个样本作为测试样本集H=[hi]。并利用H和判别函数计算测试样本的综合指标γ,进而对测试样本的所属类别进行判别,判别规则为:若γ<β,则判别为“识别”;若γ≥β,则判别为“未识别”。最后统计分类正确的样本数nc,利用式(13)计算正确百分比η。
式中,m1和m2分别为从T1和T2中提取出来作为测试集的样本数。
2 试验设计与数据采集
2.1 试验方案设计
为获取雨天高速公路场景中表征驾驶人视觉搜索能力的驱动因素,设计并搭建了由4种天气类型和8种车速场景组成的32种试验场景,并对不同场景下驾驶人对路侧信息的视觉搜索行为进行研究。试验中4种天气类型分别为晴天、小雨、中雨和大雨。在我国,高速公路的最高限速[25]为120 km/h,为在最高限速范围内采集更多车速下的试验数据,并降低试验的时间成本,在试验中的车速方案以15 km/h为步长,等间距地将车速由高到低依次设置为120、105、90、75、60、45、30、15 km/h。
选用限速标牌作为试验中的路侧视觉搜索目标。我国国标《GB5768.2-2022,道路交通标志和标线》中规定,限速标牌的配色方案为白底搭配黑字红圈[26]。为判断驾驶人是否正确识别标牌中的限速信息,设计了如图2所示的6种不同限速值的限速标牌,并在每种试验场景中,随机采用其中的一种限速标牌作为视觉搜索目标。
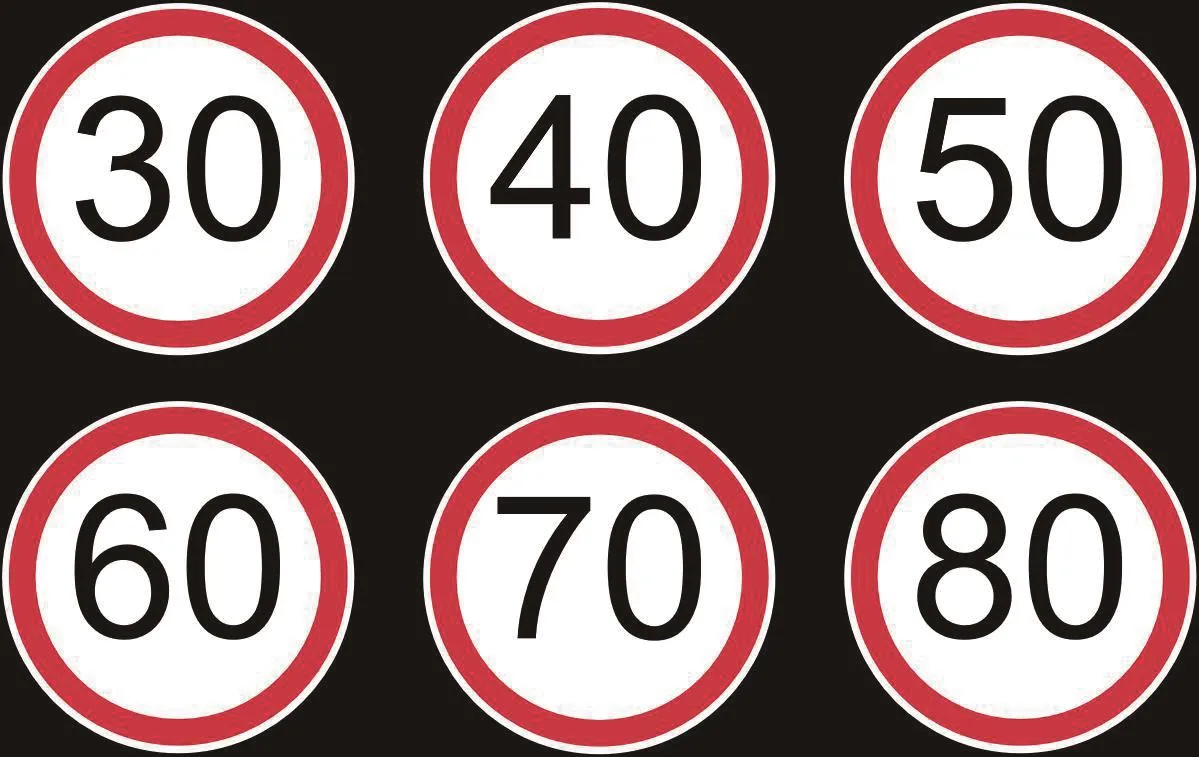
图2 试验中的限速标牌Fig.2 Speed limit signs in the experiment
16名男性和14名女性参与试验,年龄分布在22至29岁之间(均值为25.24,标准差为3.11)。所有被试人员身体状况良好,试验前睡眠充足,且未饮酒或服用药物。每名被试人员累计完成32个场景下的试验,完成试验后每人可获得200元报酬。试验流程如下:
(1)被试人员以场景中的限速值保持匀速行驶,且在试验全程中应保持直行,不得随意变换车道。
(2)当车辆行驶至指定位置时道路前方会出现限速标牌,被试人员在准确识别出限速标牌上的数字后,立刻采取制动行为至车辆完全停止。
(3)工作人员记录驾驶人的眼动数据以及车辆的行驶时间、速度、制动踏板开度、制动减速度和行驶位移等数据。
(4)被试人员休息5 min后开始下一试验场景的数据采集,重复上述流程完成该名被试人员的全部实验。
2.2 试验平台搭建
由于实车试验存在较大的危险性,且难以控制降雨程度,因此本试验利用模拟驾驶平台进行,模拟试验平台如图3所示。
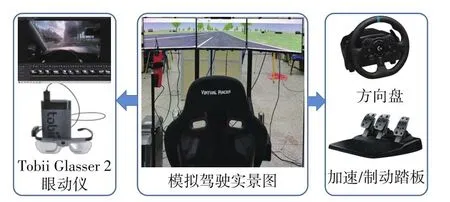
图3 模拟试验平台Fig.3 Simulation experiment platform
驾驶模拟软件是UC-win/Road。驾驶模拟器的硬件包括:一台高性能计算机、三块液晶显示屏(协同工作来显示驾驶场景的视频信息)、罗技G29方向盘及VIRTUAL RACER 55加速/制动踏板套件等。利用Tobii Glasser 2眼动仪采集被试人员的眼动数据。
试验场景中的行车线路为一条2 km的双向四车道高速公路。根据GB5768.2-2009中对于限速标牌的设置参数说明[27],将试验场景中的限速标牌直径设为1 m,标牌支撑结构的高度设为2 m。
通过设置UC-win/Road软件中的天气参数和挡风玻璃噪声改变驾驶场景中的降雨强度,其中天气参数包括雨滴尺寸、雨滴密度、雾密度和积水反射率,挡风玻璃噪声主要包括噪声强度和雨帘厚度。4种天气类型对应的模拟驾驶场景设置参数如表1所示。此外,在降雨天气场景下驾驶人需要开启雨刷功能。4种天气类型下的模拟驾驶场景以及对应降雨强度计算结果如图4所示。
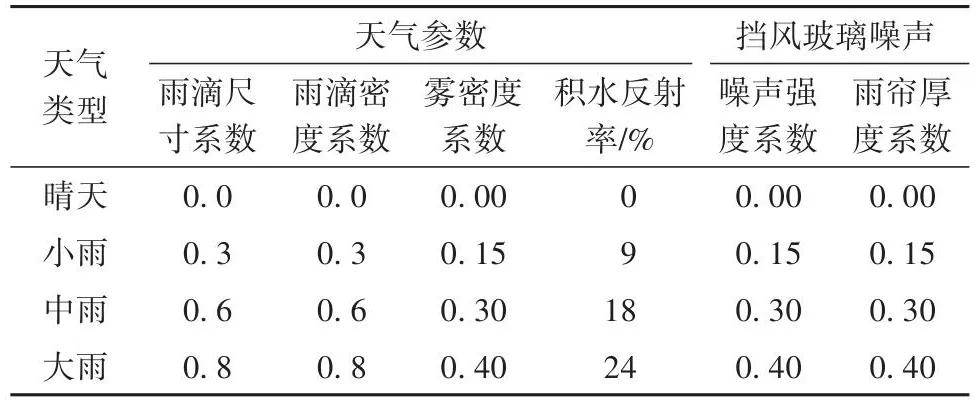
表1 4种天气类型下的模拟场景设置参数Table 1 Setting parameters of simulation scenarios under four weather conditions
3 驾驶人视觉搜索指标分析
3.1 视线角度分析
4种降雨强度和8种车速下的平均视线角度箱线图如图5所示。在相同降雨强度下,随着车速的提高,视线角度逐渐减小,表明当车速过高时,驾驶人无法对行驶道路上方交通标志信息进行充分观察。在相同车速下,视线角度随着降雨强度的增加而减小,且随着降雨强度的增加,车速对驾驶人视线角度的影响逐渐降低。此外,视线角度标准差随降雨强度的增加而减小,这表明随着降雨强度的增加,驾驶人视线角度的个体差异性逐渐减小。上述现象说明,降雨强度的增加对驾驶人的心理状态产生了负面影响,驾驶人为保证安全行车会主动降低视线角度的变化幅度,将更多注意分配至道路前方以及车辆的仪表盘区域,进而缩小注意范围。当驾驶人进行视觉搜索时,注意范围的减小意味着驾驶人需要花费更多努力将注意转移至观测目标,并且难以接收到注意范围以外的刺激信号,导致无法及时发现路侧交通信息。
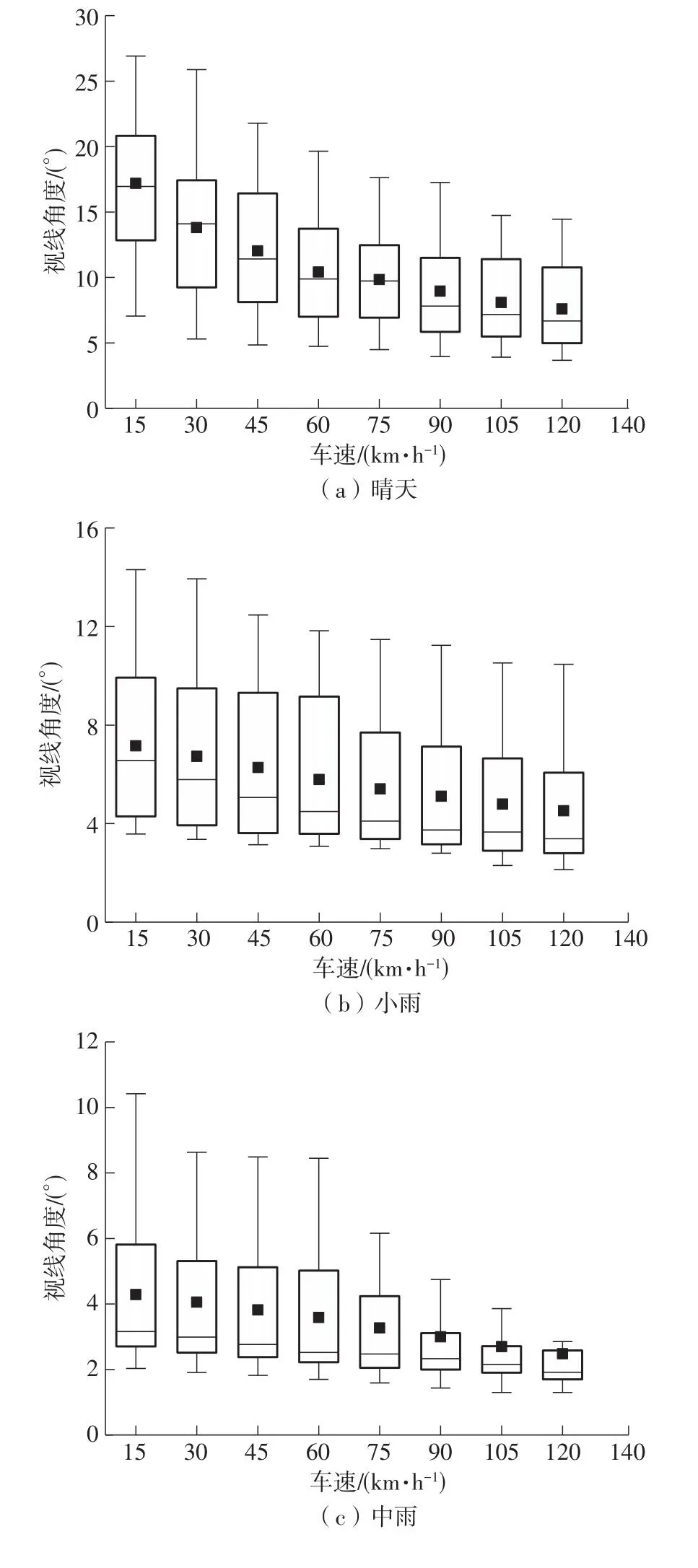
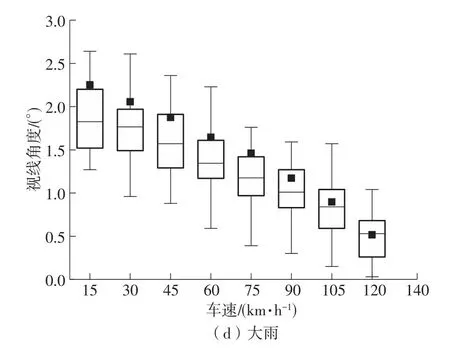
图5 不同降雨强度和车速下的视线角度箱线图Fig.5 Boxplots of line-of-sight angle at different rainfall intensities and vehicle speeds
3.2 AOI注视分布比例分析
8种车速和4种降雨强度下全部驾驶人对7个AOI中注视分布比例均值的统计结果如表2和表3所示。结合表2和表3可知,在不同降雨强度和车速下驾驶人对道路左内侧、道路右内侧和仪表盘区域的注视分布比例范围较低,其中道路左内侧和道路右内侧的注视分布比例P范围分别是0.26%~1.18%和0.52%~2.15%,仪表盘区域的注视点分布占比变化范围在1.53%~2.83%。这表明由于仪表盘、道路右内侧和道路左内侧与道路前方区域之间距离较近,驾驶人不需要分配过多注意即可获取上述3个区域内的交通信息,且车速和降雨强度对3个区域的注意分配影响程度较小。
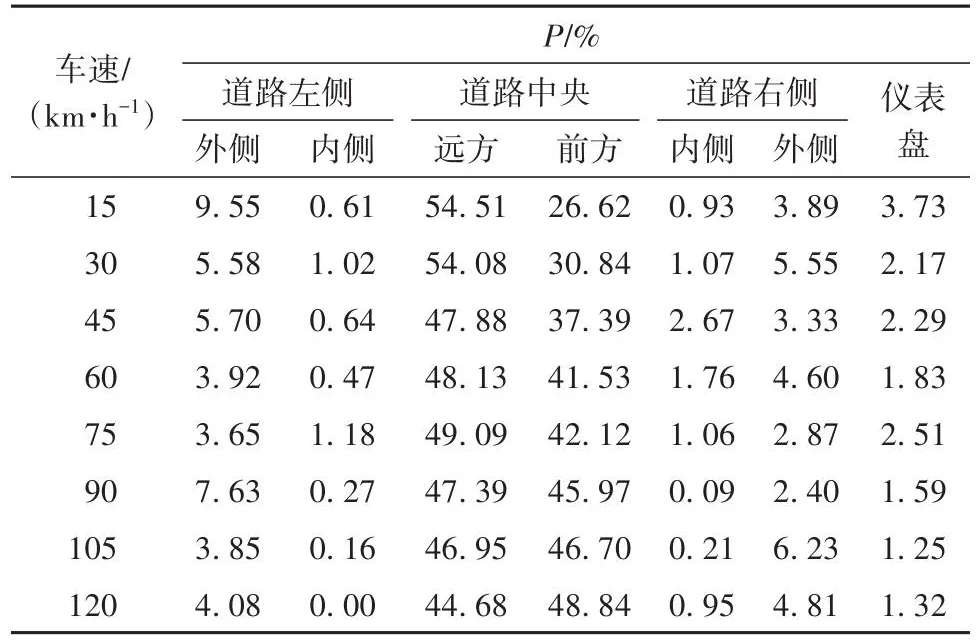
表2 不同车速下各AOI内注视分布比例统计结果Table 2 Statistics of fixation distribution percentage in each AOI under different vehicle speeds
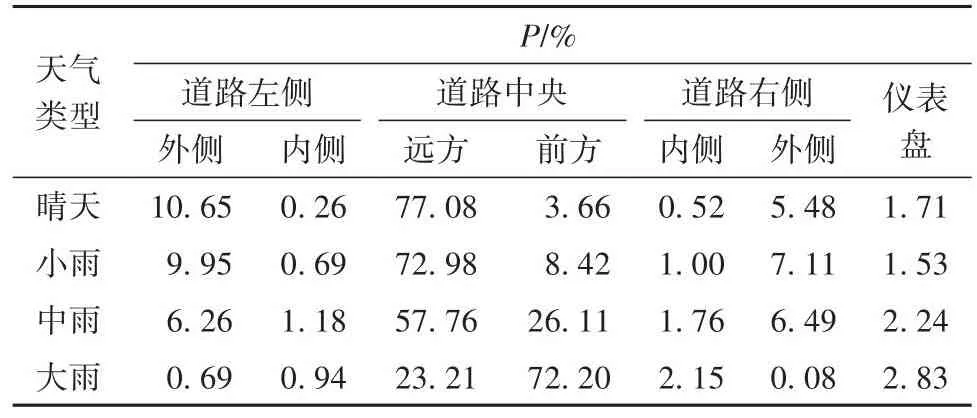
表3 不同降雨强度下各AOI内注视分布比例统计结果Table 3 Statistics of fixation distribution percentage in each AOI under different rainfall intensities
在晴天、小雨和中雨场景下,驾驶人对道路左外侧和道路右外侧的注视分布比例范围分别是6.26%~10.65%和5.48%~7.11%;但大雨场景下,道路左外侧区域和道路右外侧区域的注视分布比例显著减少,分别为0.69%和0.08%。上述统计结果表明,当降雨强度较低时,驾驶人的观察范围较广,且不需要进行多次长时间的注视行为就可以观察到道路左外侧和右外侧区域的交通信息。而在大雨场景下,驾驶人视线受到较大影响,为确保行车安全,无法向道路外侧的交通信息分配注意。
在晴天和小雨场景下,驾驶人对道路远方的注视分布比例较大,分别是77.08%和72.98%。但随着降雨强度的增加,道路远方的注视分布比例逐渐降低,在中雨和大雨场景下的注视分布比例分别是57.76%和23.21%。此外,当降雨强度增加或车速提高时,驾驶人在降低对道路远方关注程度的同时,还会增加对道路前方区域的注视分布比例。上述统计结果表明,车速和降雨强度的增加都会导致驾驶人难以观察道路远方的交通信息,此时驾驶人为降低行车风险,会改变视觉搜索策略,转而增加对道路前方的关注程度,进而降低了对观测目标的视觉搜索效率。
由于驾驶人对道路远方和道路前方的关注程度较高,且道路远方注视分布比例与搜索效率成正比,道路前方注视分布比例与搜索效率成反比,因此本研究采用道路远方注意分布比例P1和道路前方注意分布比例P2的比值作为注视效度FV。
4 模型验证及限速方案对比
4.1 模型验证
首先分别在试验数据中取24人数据作为训练集,6人数据作为测试集,根据试验结果将数据集划分为“识别”和“未识别”两类标签,并利用Matlab软件进行模型训练和验证。然后通过对比模型对测试样本的分类结果r1与测试样本的实际标签r0来确定判别结果的正确与否,若r1与r0相同,则属于正确判别;若r1与r0不同,则属于错误判别。最后分别统计“识别”和“未识别”两类标签的正确判别数和错误判别数,并分别计算两类标签的正确百分比与合计正确百分比。最终得到的测试集分类结果如表4所示。
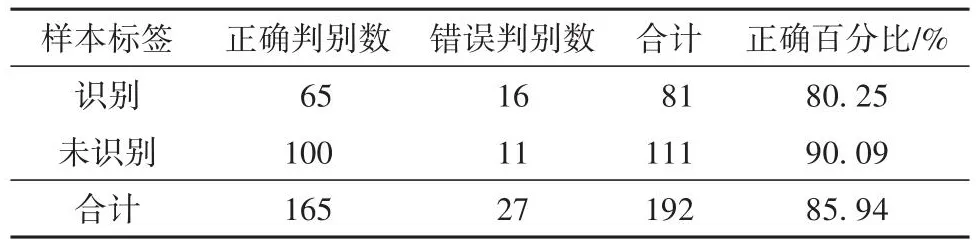
表4 测试集分类结果Table 4 Classification results of test data set
由表4可知,“识别”分类结果中正确百分比为80.25%,“未识别”分类正确百分比为90.09%,整体正确百分比为85.94%。表明采用本研究构建的Fisher判别模型可以较好地对雨天行车时驾驶人的视觉搜索能力进行评价和预测。
4.2 限速方案对比
分别采用基于停车视距的雨天限速模型和基于驾驶人视觉搜索能力的雨天限速模型计算限速方案,并对两种模型的计算结果进行对比。
在基于停车视距的雨天限速模型中,以驾驶人在发现冲突对象并采取制动措施过程中,停车视距不大于道路能见度作为约束计算限速值。设道路能见度是Sv,根据停车视距的计算公式,得到雨天安全车速vb的求解公式为
式中:φ是雨天路面附着系数,建议取值0.28,σ是道路坡度,建议取0°。
根据现行的中国气象局对降雨强度等级的划分标准[27]确定道路能见度,然后以道路能见度作为雨天驾驶人的停车视距,利用式(15)计算最高车速。同时以高速公路最高行车速度120 km/h作为约束,对基于停车视距计算的最高车速进行修正,最后对修正后的最高车速做取整处理,得出基于停车视距的设计限速值。
在基于驾驶人视觉搜索能力的限速方案中,以车速、降雨强度、注视效度和视线角度作为Fisher判别模型的输入,以路侧信息的识别结果作为输出。对输出结果为“识别”的最高车速做取整处理,并将其作为当前降雨强度的设计限速值。
针对小雨、中雨和大雨3种场景,采用两种限速方案计算的雨天高速公路设计限速值如表5所示,其中方案1是基于停车视距的限速方案,方案2是基于驾驶人视觉搜索能力的限速方案。
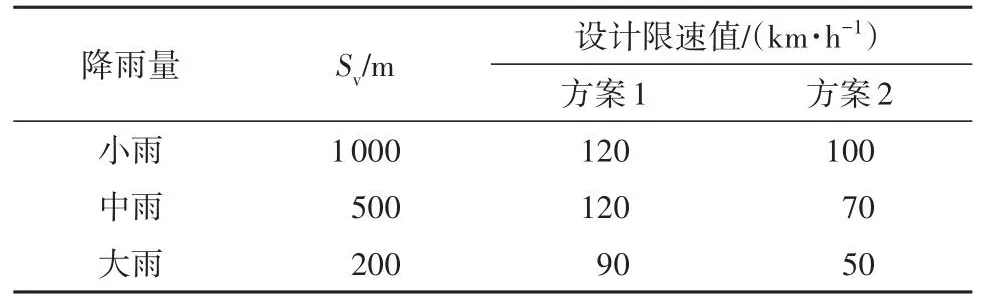
表5 两种方案下的雨天高速公路设计限速值Table 5 Speed limits at expressway in rainy day calculated by two schemes
通过对比表5中方案1和方案2的设计限速值可知,基于停车视距的限速模型计算限速值较高。因此在设计雨天高速公路限速方案时,为避免由于车速过高导致驾驶人无法准确识别路侧交通信息,以保证雨天公路的行车安全,小雨、中雨和大雨的公路限速值分别应不超过100、70和50 km/h。
5 结论
(1)基于注意分配理论将车速、驾驶人视野图片清晰度、兴趣区域注视分布比例和视线角度作为雨天行车驾驶人注意分配指标,结合Fisher判别理论构建了雨天视觉搜索能力量化模型。模型的整体分类正确率为85.94%,可以较好地评价和预测雨天行车时驾驶人的视觉搜索能力。
(2)车速和降雨强度的增加都会对驾驶人的视觉搜索范围和搜索效率产生负面影响,因此当车速和降雨强度匹配不当时,驾驶人需要花费更多努力将注意转移至观测目标所在的兴趣区域,进而降低了驾驶人接收到注意范围以外刺激信号的可能性,导致无法及时发现路侧交通信息。
(3)分别对传统基于停车视距的限速方案和基于驾驶人视觉搜索能力的限速方案进行了对比,结果表明基于停车视距的限速模型计算的限速值较高。为了避免由于车速过高导致驾驶人无法准确识别路侧交通信息,小雨、中雨和大雨的限速值分别应不超过100、70和50 km/h,以确保降雨天气下高速公路的行车安全。
