基于北斗定位的无人机可视化监测方法
2023-07-25王海楠
宋 煜,黄 祥,张 欣,王海楠
(江苏方天电力技术有限公司,江苏南京 211102)
随着通信技术的不断发展与融入,人们已经可以利用无人机精准地监测任务,获取大量的精准数据[1]。无人机操作者在控制无人机执行任务的同时,也要关注无人机自身及其周边环境的相关数据[2]。由此可见无人机监管模块的重要性,国内外学者均对其进行了深入的研究。
吴曌月[3]提出了基于GPS 全球卫星导航系统的无人机可视化监测方法,在GPS 导航的基础上对无人机的飞行位置进行全方位监测,实时完成高精度数据上传。该方法具有较高的数据采集精准性,但是容易造成数据泄露,安全性较低。李英成[4]等提出了基于北斗一代系统的无人机飞行数据监管方法,通过北斗一代系统中的双星定位,获取无人机的实时位置数据,可以实时授权无人机监管模块上传与通信功能,具有较高的数据采集效率。但是该方法不能满足信号与国际导航系统的格式兼容,从而导致无人机数据监管方法没有广泛推广。
综上所述,该文利用北斗定位研究了一种新的无人机可视化监测方法。
1 无人机可视化数据采集
对无人机可视化数据的采集通常在较为复杂的环境下进行,确定可视化数据采集满足不同环境下的精准定位要求。该文选用北斗定位导航芯片[5]作为数据采集的核心元件,该芯片具有抗干扰性能高、能够适应北斗通信系统以及能够精准高速处理数据的特点。该芯片在对外部的可视化数据采集的过程中设定数据的输入通道是64 位HTM 芯片,通道中的传输数据频率控制在BDSB1/GPDL1 范围内,由于无人机所处环境实时更新,所以采集数据的更新频率必须大于1.5 Hz,对可视化数据采集的精准度也控制在-163 dBm 以内[5]。
无人机可视化数据在芯片中会在STM32 串口处进行相关数据的接收与格式初始化,再从该引脚PA2 和PA3 处进入到引脚T2IN 中,完成可视化数据传输通信的申请,通过申请的数据再进入到TXD1中,被传输模块中的处理器读取。无人机可视化数据从采集到传输流程之间所在的电路连接图如图1所示。
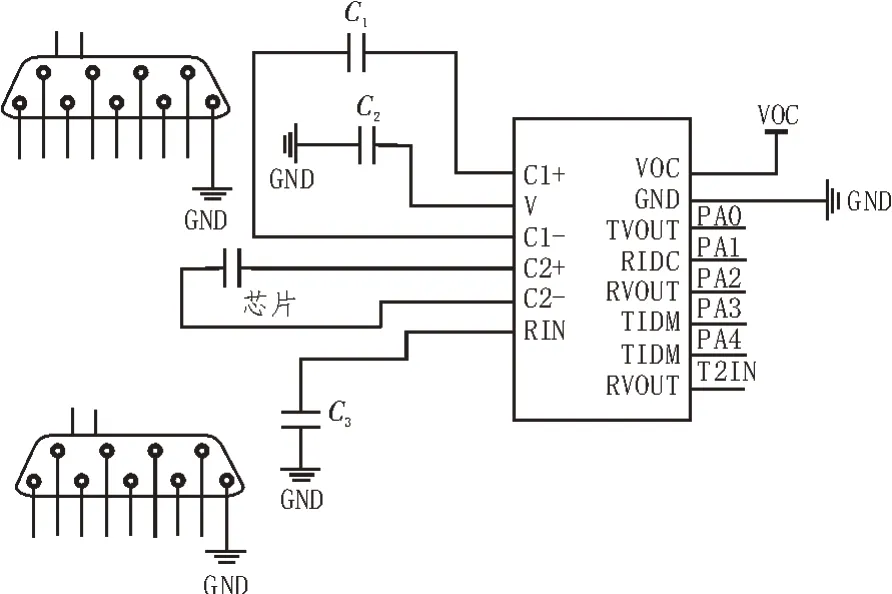
图1 无人机可视化数据从采集到传输流程之间所在的电路连接图
根据图1 可知,无人机可视化数据从采集到传输流程之间所在的电路内部拥有三个电容,一个芯片[6]。当无人机由于某种原因与操作终端之间失去联系或无人机出现事故,其中的无线射频模块开始动作。无线射频模块中的核心元件为芯片,该芯片与操作端口中的射频电路实时保持关联[7]。在无人机失去联系信号的第一时间,该模块迅速对周围的信息进行采集,并将采集到的可视化信息发送到操作终端中,模块采集的可视化数据中不仅仅包含无人机的事故信息,同时也包含报警请求信号,以便帮助操控人员对无人机实施搜救。
2 无人机可视化数据传输
基于北斗定位的无人机可视化数据传输采用的是无线通信传输模式,可以帮助无人机在飞行状态下具有较好的数据传输稳定性和畅通性。
无人机对外传输数据时要确定可视化数据包的基础格式与初始格式,对两种格式的前导码进行检测,同时还要校验可视化数据长度是否符合数据传输终端地址的规范类型,完成检验后的数据包被划分成为前导码、同步字、数据包长、传输地址、有效数据、CRC 校验数据六部分[8-9]。
其中前导码是可视化数据的交叉序列表现形式,无人机在数据传输之前设置一个前导码可以将所有的可视化数据同步,同步字的作用是将无人机可视化数据中的字节同步处理,处理后的字节可以被应用在32 位的传输通道中,数据包长度是表现数据包长度的一种形式[10-11]。
PC 机与无人机操作终端之间的运作流程如图2所示。
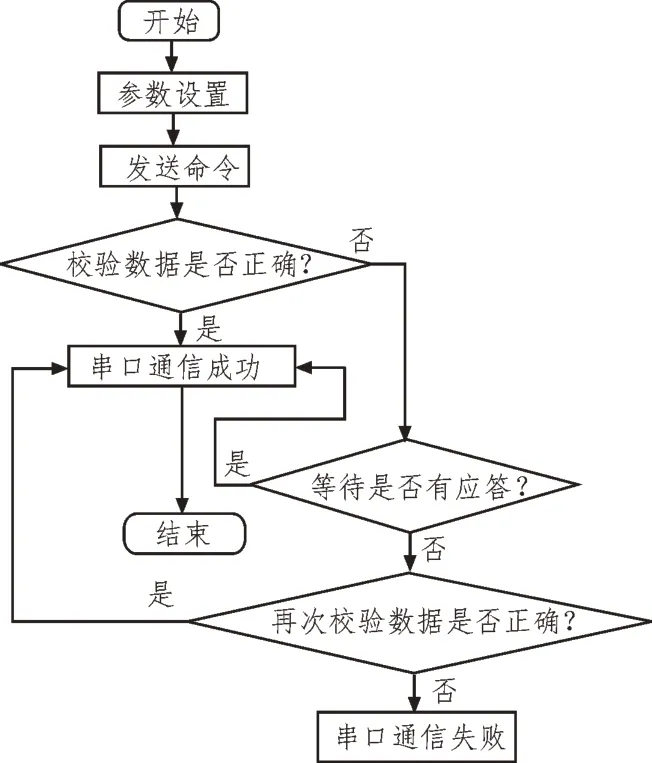
图2 PC机与无人机操作终端之间的运作流程
根据图2 可知,通过参数设置和发送命令完成初始化,检验数据成功,判断数据通信是否成功。有效数据和CRC 校验数据分别代表无人机可视化采集数据和通信相关数据[12-13]。当无人机由于某种原因与操作终端之间失去联系,或出现事故,则无人机的PC 通信机开始运作,PC 通信机中的RS-232C 与操作终端中的信息框发起呼叫,并不间断地向操作终端发送无人机的实时位置,还要保证无人机的呼叫通信接口时钟与操作终端时钟同频。
3 无人机可视化数据监测
利用传感器对数据进行监测,监测示意图如图3所示。

图3 监测示意图
根据图3 可知,该文研究的数据监测方法通过3个传感器对节点进行监测。远程服务器的通信功能建立在套接字技术上,服务器中的套接字在Socket函数上与本地IP 和端口相关联,保证IP 端口与通信端口在同频信道上[14]。服务器上还有listen 函数,进入该函数的通信数据需要等待无人机操控端口的确认,若得到操控端口的认可,则使用accept 函数对无人机可视化数据的内容进行提取,并将提取出来的数据与标准化数据库中的参数对比;若没有得到操控端口的认可,则需要返回到通信通道中,在套接字ns上规划读/写格式[15]。Socket函数表达式如下所示:
其中,af代表无人机可视化待监测数据的一个地址,type 代表套接口类型,protocol 代表数据套接口的通信协议。
listen 函数的表达式如下所示:
其中,sockfd 代表套接口处的未连接可视化数据,backlog 代表可视化数据的等待监测长度[16]。accept 函数表达式如下所示:
其中,socket 代表套接口在完成数据连接后的监测连接端,addr 代表可以供信道缓冲的可视化数据地址,addeten 代表addr 地址的有效长度。
最终的函数结果表现在监控客户端中,在客户端中以三维图形的方式体现,增强了北斗定位系统的可视化性能,无人机的管理人员通过数据管理模块或通信模块可以实现对无人机可视化数据的实时监测。当无人机由于某种原因与操作终端之间失去联系,或出现事故,无人机的操控端仍可以应用此套流程完成对无人机事故的相关数据完成监测,帮助后续的搜救任务顺利完成。
4 实验研究
为了验证该文提出的基于北斗定位的无人机可视化监测方法的有效性,设定验证实验。在实验前,建立传输地址,传输地址是数据包中的数据卸载传输时需要对外表现的代码,通过无人机内部的ADDR 寄存器可以调整地址,ADDR 寄存器可以调整的地址类型如表1 所示。

表1 ADDR寄存器可以调整的地址类型
实验参数设定如下:操作系统为Windows 10,共有60 位,内存为48 GB,处理器为i5。设定实验环境如图4 所示。

图4 设定实验环境
图4 中,m 表示无人机空位信号,d 表示串行通信接口。根据图4 可知,该文研究的无人机可视化监测实验利用发送电路和接收电路实现信息的处理,内部设置了消息模块,通过光纤以太网进行数据发送。
在小型固定翼无人机平台上,对无人机数据进行采集设定相机的曝光时间低于1/500 s,采集的数据为2 663 幅,飞机的飞行高度为800 m,飞行区域如图5 所示。

图5 飞行区域示意图
根据图5 可知,飞行区域跨越经过一段时间。利用该文的监测方法和传统的基于GPS 全球卫星导航系统的无人机可视化监测方法、基于北斗一代系统的无人机飞行数据监管方法进行精度对比,比较并行路段的精度和合点、分点精度。并行路段精度实验结果如图6 所示。

图6 并行路段精度实验结果
根据图6 可知,在并行路段,无人机以曲线方式飞行,传统的基于GPS 全球卫星导航系统的无人机可视化监测方法、基于北斗一代系统的无人机飞行数据监管方法与实际位置存在较大的偏差,该文方法与实际位置基本一致。造成这种现象的原因是该文基于新一代的北斗定位研究无人机可视化监测方法,在北斗定位系统通信技术和定位技术逐渐成熟的情况下,对无人机的飞行状态和飞行环境等信息实时观测,再将观测到的数据上传至终端,供操作人员分析使用,解决了传统方法中的无法保障信息安全问题和监测结果不准确等问题。合点、分点精度实验结果如图7 所示。
根据图7 可知,实际的无人机采用直线方式进行飞行,该文方法与实际位置相近,而传统的基于GPS 全球卫星导航系统的无人机可视化监测方法、基于北斗一代系统的无人机飞行数据监管方法向着反方向行驶。造成这种现象的原因是该文研究的基于北斗定位的无人机可视化数据监控中心是无人机可视化数据监测流程的核心。监控中心可以通过北斗定位系统对无人机所采集和处理的所有数据进行监控管理,负责数据监控的是基于北斗定位系统的远程服务器,负责数据管理的是基于北斗定位系统的数据库。其中远程服务器可以使无人机与控制终端之间建立起数据纽带,实现两者之间的通信,数据库可以对无人机采集与处理的数据实现长久存留,并在大数据与云计算的基础上建立起三维的无人机飞行历史记录。
数据库除了具有提供数据储存的功能外,还具有检索、数据处理和保护数据的功能,为了能够满足无人机可视化数据监测的持续性,数据库在数据监测的过程中不断扩展自身的储存空间,随着监测时间的增长,数据库的容量也就越大,但是数据库的数据极限储存量为三个月的无人机监测数据。
5 结束语
该文研究了基于北斗定位系统的无人机可视化数据监测方法,利用北斗定位系统的精准定位功能和数据采集功能,再加上无人机自身的数据通信、处理、管理和储存功能,解决了传统方法中的信息采集质量差、安全性不高等问题。该文研究的监测方法监测时间较长,未来需要进一步深入分析。
