不相称分数阶统一混沌系统的滑模同步
2023-07-25周卫光郑永爱
周卫光,郑永爱
(扬州大学信息工程学院,江苏 扬州 225127)
近年来,人们在整数阶混沌系统的理论基础上开始对分数阶系统展开研究。通过研究发现,许多分数阶系统也存在混沌现象,如分数阶Chen 系统[1],分数阶离散Lorenz 系统[2],分数阶时滞Lü系统[3],分数阶统一混沌系统[4-6],分数阶金融系统[7]和分数阶Genesio-Tesi 系统[8]等。与此同时,分数阶混沌系统的控制和同步也取得了很大的进展,各种各样的混沌同步控制方法被相继提出,如滑模控制[9]、自适应控制[10-11]、无源控制[12]和主动控制[13]等。
分数阶统一系统将分数阶Lorenz 系统、分数阶Lü系统和分数阶Chen 系统联系起来。由于分数阶统一系统包含了混沌动力学的许多特征,因此很多学者对其进行研究,并取得了一些研究成果。文献[14]基于无源控制理论,设计一种能够使分数阶统一混沌系统稳定的无源反馈控制器。文献[15]设计了一种实现分数阶统一混沌系统函数投影同步的自适应控制器。但这些控制和同步方案都未考虑分数阶统一混沌系统存在的外部未知扰动。文献[16]利用分数阶扰动观测器对分数阶金融系统存在的外部未知有界扰动进行估计,结合分数阶扰动观测器设计了自适应滑模同步的控制方案,实现了分数阶金融系统的有界混合投影同步。然而文献[16]所设计的分数阶扰动观测器只能使扰动误差是有界的,而不能使扰动误差渐近趋于零,并且也只是实现了分数阶金融混沌系统的有界混合投影同步,而不是渐近同步。
针对以上问题,笔者首先设计了一种新的分数阶扰动观测器来估计分数阶统一混沌系统的外部扰动,该分数阶扰动观测器能使扰动误差渐近趋于零;然后结合所提出的分数阶扰动观测器构造分数阶积分滑模面并设计了合适的自适应滑模控制器,实现了具有未知干扰、不相称分数阶统一混沌系统的渐近同步控制;最后数值模拟验证了该方法的有效性。
1 系统描述与分数阶导数
分数阶导数的定义有多种,这里采用Caputo 定义来研究具有未知扰动的不相称分数阶统一混沌系统的同步问题。Caputo 导数定义为:
其中,n-1 <q<n,n∈N,Γ(·)为伽马函数:
不相称分数阶统一混沌系统[4]描述如下,并将其简化为系统(1),以下简写类似:
其中,x1,x2,x3为状态变量,q1,q2,q3∈(0,1) 为分数阶。当α∈[0,0.8)时,系统属于广义不相称分数阶Lorenz 系统;当α=0.8 时,系统属于广义不相称分数阶Lü系统;当α∈(0.8,1]时,系统属于广义不相称分数阶Chen 系统。设q1=0.991,q2=0.992,q3=0.993;初始条件为x(0)=[5,8,10]T,分数阶统一混沌系统的混沌吸引子如图1、图2 和图3 所示。

图1 α=0 时,分数阶Lorenz系统混沌吸引子

图2 α=0.8 时,分数阶Lü系统混沌吸引子
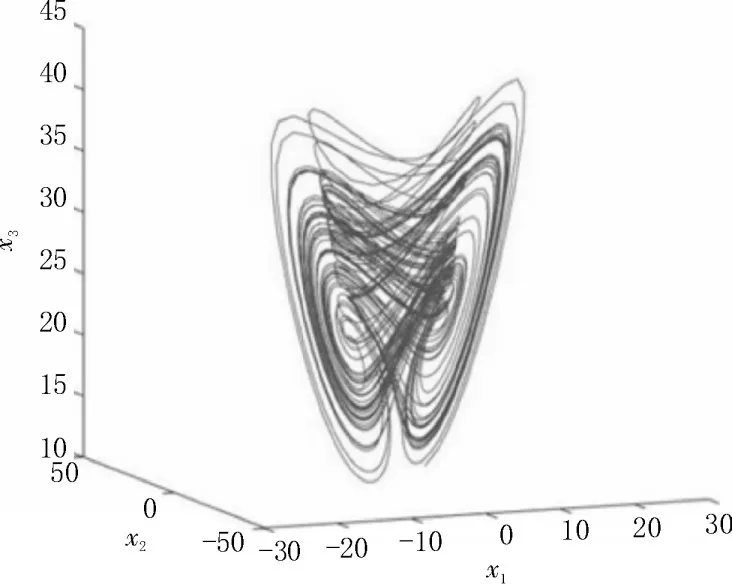
图3 α=1时,分数阶Chen系统混沌吸引子以系统(1)为驱动系统,相应的具有未知扰动的响应系统为:
其中,y1,y2,y3为状态变量,d(t) 为外部未知扰动,q1,q2,q3∈(0,1),u(t)为控制输入。
定义误差变量ei=yi-xi,i=1,2,3,得到误差系统:
引理1对于分数阶线性系统:
其中,q∈(0,1),x∈Rn,A∈Rn×n,若矩阵A的特征值λi满足,则分数阶系统(4)的零点是渐近稳定的。
引理2设x(t)∈R是一个连续可导的函数,那么对于任意时间t≥t0且0 ≤q≤1,有:
引理3设V(t)函数如下:
其中,y1(t)∈Rn和y2(t)∈Rn具有连续的一阶导数,Q1∈Rn×n和Q2∈Rn×n为两个正定矩阵。若存在正定矩阵Q3∈Rn×n和常数h0>0 使得:
2 观测器及滑模同步控制设计
2.1 分数阶扰动观测器的设计
为了实现驱动系统(1)与响应系统(2)之间的同步,控制目标选取合适的控制器u(t),使得误差系统(3)的零点是渐近稳定。然而由于外部扰动d(t) 未知,不能直接用于控制器u(t)的设计。为了克服这一问题,首先设计一个分数阶非线性扰动观测器来估计未知扰动。在设计分数阶扰动观测器之前,引入假设1 如下:
假设1假设外部扰动d(t)的Caputo 分数阶导数有界,即,其中ω是已知的正常数。
为了设计分数阶非线性扰动观测器,定义辅助变量:
其中,β是正常数。
辅助变量φ(t)的Caputo 分数阶导数为:
由系统(2)中第二个等式和(9)得:
为了计算扰动估计,中间变量φ(t) 的估计描述为:
根据式(8),外部扰动d(t)的估计为:
定理1考虑扰动观测器(11)和(12),如果假设1的条件满足,那么扰动估计误差渐近收敛于零。
证明:根据式(8)、(12)得:
根据式(10)、(11)得:
根据引理2,Vd的Caputo 分数阶导数为[18]:
将式(13)代入式(15)并根据假设1,得:
2.2 自适应滑模同步
为了让研究能够进一步开展,给出下面的假设2。
假设2假设存在未知正常数k,使得:
设计分数阶积分滑模面为:
滑模控制器设计为:
自适应律为:
定理2在假设1 和2 的条件下,如果设计分数阶扰动观测器(11)和(12),自适应滑模控制器(18)和(19),那么误差系统(3)的零点是渐近稳定的,即驱动系统(1)和响应系统(2)实现渐近同步。
证明:构造Lyapunov 函数:
根据引理2,Vs的Caputo 分数阶导数为:
由控制器(18)和自适应律(19)有:
3 数值模拟仿真
利用Matlab 进行数值仿真,选取不相称分数阶q1=0.991,q2=0.992,q3=0.993,初始值x(0)=[5,8,10]T,y(0)=[-6,-8,-10]T,α=0,d(t)=4 cos(2t),β=60,=0.1,λ=20,r=0.1,ω=0.01。所设计的分数阶扰动观测器(11)和(12)的扰动观测结果和观测估计误差分别如图4 和图5 所示,这表明所设计的分数阶扰动观测器是有效可行的。
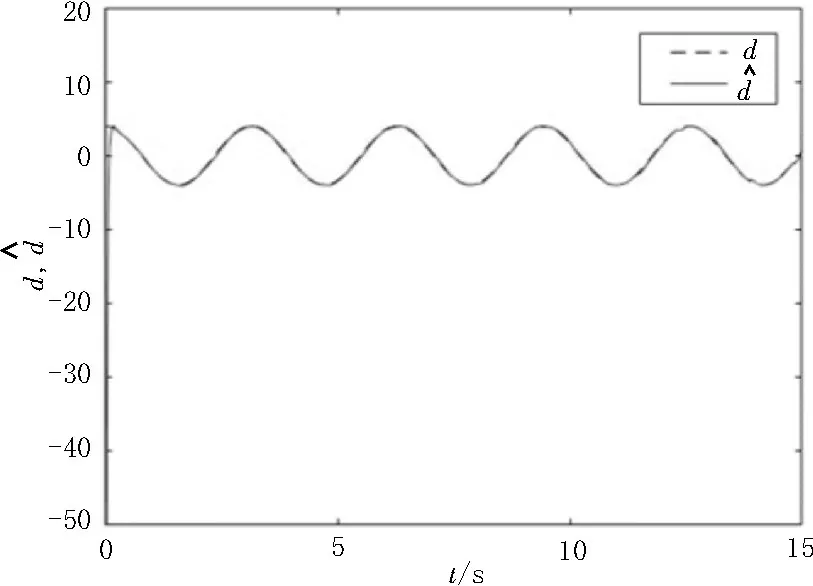
图4 扰动d 和扰动估计的轨迹
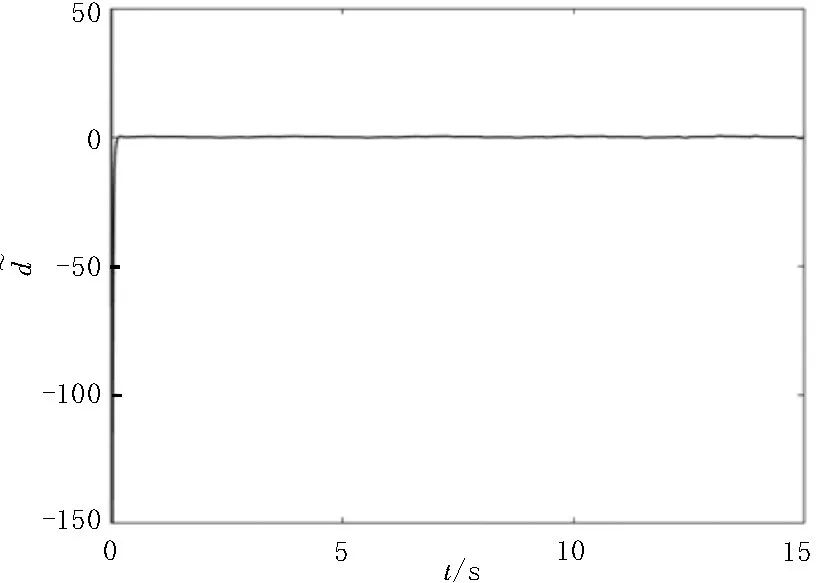
图5 估计误差的轨迹
应用自适应滑模控制器(18)和(19)后,驱动系统(1)和响应系统(2)的状态响应如图6 所示。同步误差系统(3)的状态响应如图7 所示,误差系统(3)渐近趋于零,驱动系统(1)和响应系统(2)实现渐近同步。滑模运动轨迹和未知正常数k的估计曲线分别如图8和9 所示。

图6 驱动系统与响应系统的状态轨迹
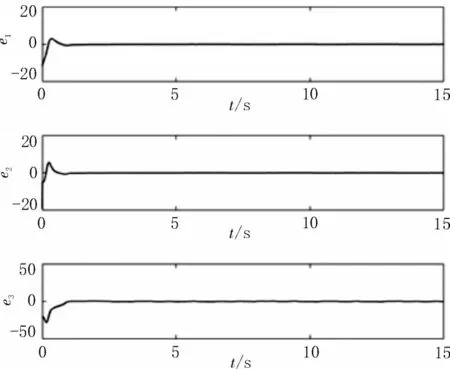
图7 同步误差与时间状态轨迹
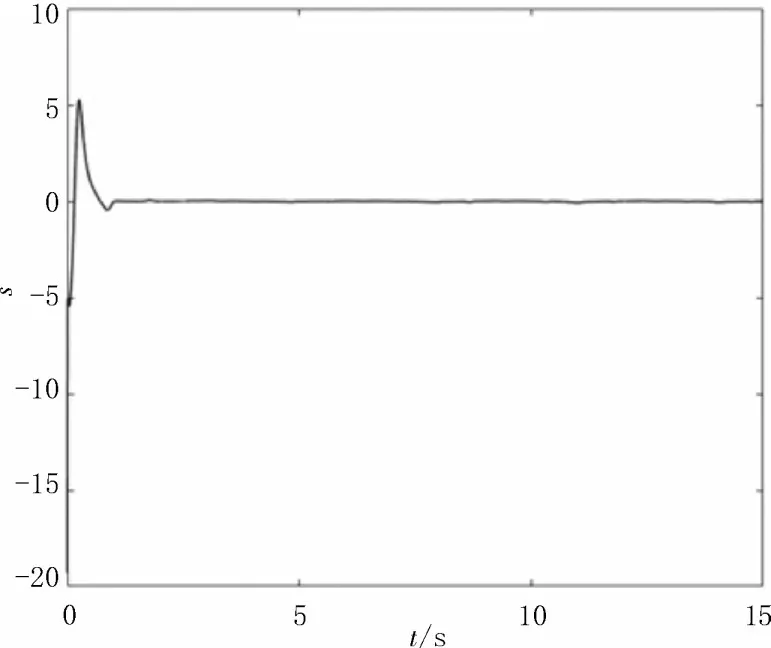
图8 滑模运动s(t)的轨迹

图9 k 的估计曲线
4 结论
将含有未知扰动的不相称分数阶统一混沌系统作为研究对象,设计分数阶扰动观测器对系统中的外部扰动进行估计。基于Lyapunov 理论和自适应控制理论,设计合适的自适应滑模控制器,实现含有未知扰动的不相称分数阶统一混沌系统的渐近同步。
