融合主被动遥感影像的冬小麦种植面积提取研究
2023-07-18张科谦宋向阳张子谦
张科谦,程 钢,吴 微,宋向阳,张子谦,姚 顺,吴 帅
(1.河南理工大学 测绘与国土信息工程学院,河南 焦作 454003;2.桂林理工大学 测绘地理信息学院,广西 桂林541000;3.河南科技大学 软件学院,河南 洛阳 471003)
冬小麦是我国主要粮食作物之一,在我国粮食生产中占有重要的地位。及时、准确地获取冬小麦空间分布信息,对冬小麦长势监测以及产量估算等具有重要意义[1-3]。传统的冬小麦空间分布信息获取需要管理人员实地考察记录,该过程不仅繁琐复杂,且容易受到人为因素的影响,导致获取的冬小麦空间分布信息不准确[4-6]。遥感技术具有范围广、时效性强和成本低等优势,为快速准确获取冬小麦空间分布信息提供了全新手段[7-9]。
光学影像由被动遥感(Passive remote sensing)的方式生成,是目前作物分类研究中最主要的数据来源。如果仅选取单时相光学影像,会因为“异物同谱”而产生漏分与错分等问题[10-11]。使用多时相光学影像并结合作物在不同生育时期的光谱差异性,可以减少“异物同谱”的影响。白燕英等[12]提出了一种基于Landsat-8 时序NDVI(归一化植被指数)曲线的作物分类方法,作物分类精度达到82%以上;王德军等[13]基于多时相Sentinel-2数据对大安市舍力镇的土地利用进行分类,总体精度达88.87%。但是光学影像会受到云雨天气的影响,获取长时序、高质量的光学影像较难,一定程度上限制了作物的分类[14]。
合成孔径雷达(Synthetic aperture radar,SAR)属于主动遥感(Active remote sensing),不受云雨天气等限制,且具有全天时、全天候获取影像的优势[15-16]。雷达卫星的穿透性不仅可以获取植被的表层信息,而且可以反映植株茎叶的含水率以及结构变化,在作物分类研究中应用广泛[17]。FRATE 等[18]应用多时相和多极化的SAR 数据基于神经网络算法进行了精确的作物分类;周涛等[19]探讨了多时相Sentinel-1A 影像在冬小麦分类研究中的应用潜力,总体精度达90.6%。上述研究表明,使用雷达影像进行作物分类具有实用性和可行性。
主动遥感影像和被动遥感影像各有优势,将两者进行不同波段结合或计算得到新的特征变量,可以有效提高作物的分类精度,已有学者将其成功应用于农作物分类研究上[20]。CAI 等[21]基于面向对象的随机森林算法处理融合Sentinel-1、2 影像,对水稻的种植面积进行提取,总体精度达95%以上;VAN TRICHT 等[22]融合多源Sentinel 影像绘制了比利时农作物空间分布图。由此可知,融合主被动遥感影像在作物分类方面效果良好。
尽管先前的研究利用主被动遥感影像融合对作物进行了较高精度的分类,但大多都是对小区域作物进行分类,大区域光学影像获取难度较大,受卫星重访周期和天气条件的影响,研究区域可能在一段时间内被多幅图像覆盖或未被覆盖,对作物分类是一项巨大挑战。本研究针对雷达影像和光学影像各自的特点,设计雷达影像、光学影像、融合雷达影像与光学影像3 种不同分类方案,采用随机森林算法进行分类,探索融合主被动遥感影像在大区域识别冬小麦的能力,以期为大区域冬小麦空间分布信息获取提供理论依据。
1 材料和方法
1.1 研究区概况
山东省位于我国华东地区(图1),地跨北纬34°22.9′~38°24.01′、东经114°47.5′~122°42.3′,西南、西北部地区以平原为主,中部多为山地,东部缓丘起伏、地形以丘陵为主。山东省属于暖温带季风气候,冬季寒冷干燥、夏季温热多雨,年降雨量的60%~70%集中于主汛期6、7、8 三个月。年平均气温约14.2 ℃,年平均降水量约839.4 mm,年平均日照约2 502.1 h,适宜种植小麦、玉米等农作物。山东省冬季以小麦为主要种植作物,冬小麦一般10月播种,11—12 月出苗分蘖,1—2 月越冬,3 月返青,4月拔节抽穗,5月灌浆,6月成熟。
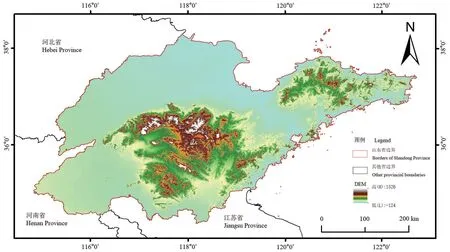
图1 山东省区位图Fig.1 Map of Shandong Province
1.2 影像数据获取
1.2.1 Sentinel 数据获取 Sentinel-1 和Sentinel-2卫星均是欧洲航天局哥白尼计划中的地球观测卫星。Sentinel-1 由2 颗极轨卫星组成,均搭载C 波段(5.4 GHz)传感器,单颗卫星重访周期为12 d。本研究以IW 模式下的Sentinel-1A GRD 产品为数据源,该成像模式拥有同极化(VV)和交叉极化(VH)2 种极化方式[23],VV 和VH 波段的分辨率为10 m。GEE云平台中的Sentinel-1A 影像已经过预处理,包括热噪声去除、辐射校正和地形校正。
Sentinel-2 影像的时间分辨率在Sentinel-2B 卫星成功发射后升至5 d,2 颗卫星均携带多光谱成像仪,轨道宽度为290 km。该卫星获取的多光谱数据涵盖可见光、近红外与短波红外的13 个波段[24]。将Sentinel-2 影像的L2A 级产品作为数据源,该数据经过了正射校正和几何精校正并进行了大气校正。将云量小于20%的影像进行保留,使用QA60 波段完成去云操作。
以上2 种影像在GEE 云平台仅需少量代码即可调用处理,本研究共使用2020 年10 月1 日至2021 年6 月12 日 的327 景Sentinel-1A 影 像 和2021年3 月22 日至2021 年4 月20 日的326 景Sentinel-2影像。
1.2.2 MODIS 数据获取 使用Terra 和Aqua 卫星获取MODIS-NDVI 植被指数产品,这2 种产品的空间分辨率为250 m,时间分辨率为16 d。由于获取影像的时间并不重合,将2 种产品合并成时间序列为8 d 的NDVI 时序数据。该时序数据是为了确定Sentinel-2 影像的合成时间窗,2 种产品去除了云层和大气等因素对NDVI 时序曲线造成的影响,可以获取更为精准的影像合成时间窗[25]。
1.3 样本数据划分
根据合成的Sentinel-2 影像中各类地物不同的纹理信息,结合Google Earth 高分辨率影像选取样本点。根据研究区概况将样本数据划分为5 种类别,分别为冬小麦、林地、其他作物、建筑和水体。共获取样本数据3 200 个,其中冬小麦1 200 个,林地600个,其他作物600个,建筑400个,水体400个。随机将样本数据划分为训练集和验证集,其中70%的样本数据用于模型构建;30%的样本数据用于分类精度验证。
1.4 试验方法
首先,根据研究区冬小麦的生育期对Sentinel-1A 影像进行合成,同时依据MODIS-NDVI 曲线对Sentinel-2 影像进行合成;然后,分别设计Sentinel-1A 影 像、Sentinel-2 影 像 和 融 合Sentinel-1A 与Sentinel-2 主被动遥感影像3 种分类方案。技术流程图如图2所示。

图2 技术流程图Fig.2 Technical flow chart
1.4.1 Sentinel 影像特征变量数据集构建 选取Sentinel-1A 影像的VV 和VH 2 种极化特征,这2 种极化特征广泛应用于作物分类[26]。
光谱特征是对各类地物进行分类的重要基础,选取Sentinel-2 影像4 个农情监测常用的光谱波段(B2、B3、B4、B8)。植被指数可以反映作物长势、种植结构、土壤背景等信息,选取归一化植被指数(NDVI)、增强型植被指数(EVI)、差值环境植被指数(DVI)3 种植被指数。NDVI 可以反映植物冠层的背景影响,与植物密度呈线性关系,对植物生长状况和空间分布密度反映良好[27];EVI 在NDVI 的基础上进行了改进,解决了土壤背景影响的问题,提高了高生物区植被的敏感度,在植被监测方面有更高的灵敏度[28];DVI 对土壤背景的变化敏感,植被覆盖度较低时,对植被的灵敏度较高,随着植被覆盖度的提高,对植被的灵敏度逐渐下降[29]。上述3 种植被指数计算公式如下:
式中,B2、B4、B8分别为蓝光波段、红光波段、近红外波段反射率值。
1.4.2 影像合成方案 受卫星重访周期或云雨天气的影响,在一段时间内,研究区处可能有多景影像覆盖,也可能无影像覆盖。在部分影像缺失的时候,可以增大影像筛选时间窗,完成影像合成,但是较大的影像合成时间窗会跨越更多的冬小麦生育时期,无法精准地反映冬小麦的物候变化特征,合成的影像不具有代表性[30]。本研究以Sentinel-1A和Sentinel-2 影像的特性为依据,借助GEE 平台对Sentinel 影像进行特征构建,提出了2 种不同的影像合成方法:根据研究区冬小麦物候特征合成冬小麦全生育期的Sentinel-1A 影像;依据研究区各类地物NDVI 时序曲线合成冬小麦越冬后Sentinel-2 影像。针对不同的传感器分别合成影像,可以充分发挥雷达影像的优势,也可以增强光学影像的信息。
1.4.3 分类方案构建 为了探索主被动遥感影像在冬小麦分类方面的能力,设计了3种分类方案:一是单独使用全生育期Sentinel-1A 影像进行冬小麦分类;二是单独使用冬小麦越冬后Sentinel-2 影像进行冬小麦分类;三是融合Sentinel-1A 与Sentinel-2主被动遥感影像进行冬小麦分类。
1.4.4 分类方法 使用的分类方法是随机森林算法。该算法具有鲁棒性好、分类速度快、分类精度高、不易产生过拟合等优势,广泛应用于作物分类等领域[31]。
1.4.5 精度评定指标 基于随机森林算法对冬小麦进行分类,采用总体精度(Overall accuracy,OA)、Kappa 系数、用户精度和生产者精度对分类结果进行综合性评估[32]。
2 结果与分析
2.1 Sentinel-1A影像合成及分类结果
计算各类地物在VV 和VH 2 种极化方式下的后向散射系数均值,绘制各类地物后向散射系数时序曲线,如图3所示。

图3 各类地物后向散射系数时序曲线Fig.3 Time series curve of backscattering coefficient of various ground objects
从图3 可以看出,冬小麦在VV 和VH 2 种极化方式下,其后向散射系数均为先降低后升高。对冬小麦物候分析可知,这是因为冬小麦在刚播种时由于植株矮小,此时土壤散射起主导作用,后向散射系数较高;随着作物的生长,冬小麦叶密度逐渐升高,冠层密度逐渐增加,土壤的散射作用逐渐减弱,冠层的散射占据主导地位,后向散射系数逐渐降低;抽穗期之后,由于麦穗的生成,冬小麦的含水率逐渐降低,叶片逐渐衰老,土壤背景的影响逐渐增大,导致冬小麦后向散射系数逐渐增加。冬小麦整个生长周期的后向散射系数时序曲线与其他地物存在较大的差异,为基于全生育期Sentinel-1A 影像的冬小麦分类提供了理论依据。根据冬小麦的9个生育期合成全生育期Sentinel-1A 影像,各生育时期影像获取时间及其对应影像数量如表1所示。
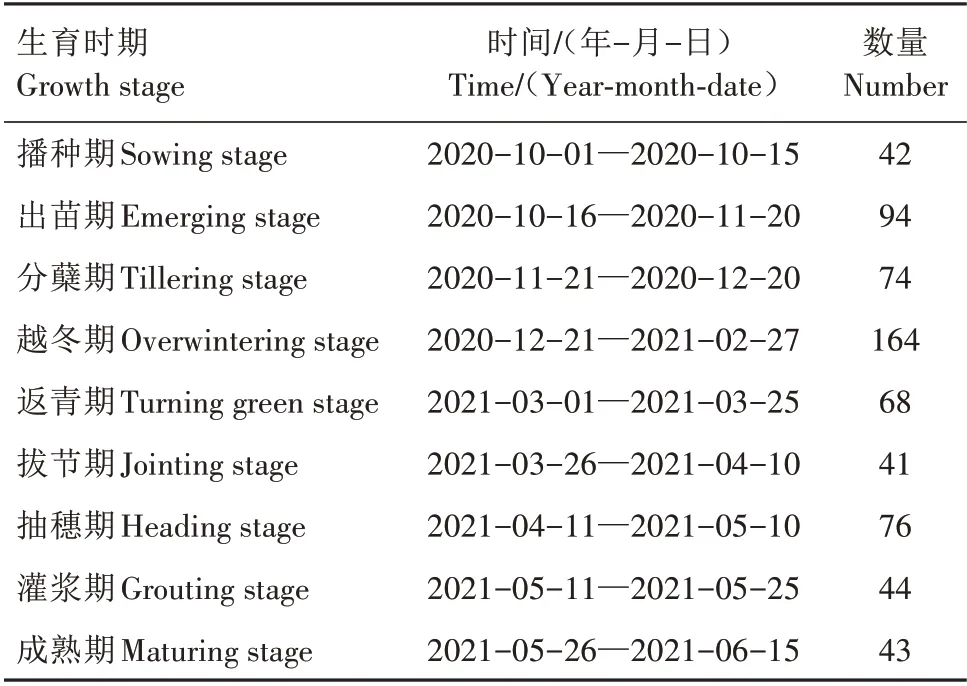
表1 Sentinel-1A影像获取时间及数量Tab.1 Sentinel-1A image acquisition time and quantity
基于全生育期Sentinel-1A 影像的分类结果如表2 所示,山东省全省和3 个示例位置(A、B、C)的冬小麦制图结果如图4 所示。从表2 可以看出,全生育期Sentinel-1A 影像分类的总体精度为81.39%,Kappa 系数为0.75,冬小麦的用户精度和生产者精度分别为83.15%和86.44%。

表2 冬小麦全生育期Sentinel-1A影像分类结果Tab.2 Results of Sentinel-1A image classification for winter wheat at the whole growth stage

图4 基于全生育期Sentinel-1A影像的山东省全省和3个示例位置冬小麦制图结果Fig.4 Mapping results of winter wheat by the whole growth stage Sentinel-1A image in Shandong Province and three example locations
全生育期Sentinel-1A 影像包含了冬小麦的所有生育时期,可以反映冬小麦整个生长过程中的变化,因此可以对冬小麦和其他地物进行有效区分。但是Sentinel-1A 影像受斑点噪声的影响,以及极化信息的有限性,导致制图结果中存在大量的“椒盐噪声”,致使山东省冬小麦制图结果中处处都有冬小麦的分布(图4)。
2.2 Sentinel-2影像合成及分类结果
使用MODIS 影像计算各类地物NDVI 值,绘制各类地物的NDVI 时序曲线如图5 所示。从图5 可以看出,冬小麦的NDVI 时序曲线具有“双峰一谷”的特性。对冬小麦物候信息分析可知,冬小麦在越冬期前,随着植株的生长,土壤背景的影响逐渐减弱,NDVI 呈现增加的趋势并达到第1 个波谷;冬小麦进入越冬期后,基本停止生长,植株体内的叶绿素含量降低,NDVI 呈现降低的趋势并达到波备;返青期至抽穗期,冬小麦生长旺盛,叶绿素含量逐渐升高,NDVI值逐渐增大,直至出现第2个波峰;抽穗期至成熟期,由于麦穗的生成,冬小麦含水率和叶绿素含量逐渐降低,叶片发黄逐渐衰老,NDVI 值逐渐降低。

图5 各类地物NDVI时序曲线Fig.5 NDVI time series curve of various ground objects
3 月下旬至4 月下旬冬小麦生长旺盛,除冬小麦外其他植被此刻生长缓慢,还未进入生长旺期,通过NDVI时序曲线可知,此时冬小麦的NDVI值远大于其他地物,与其他地物的可分性较好。故选取3 月下旬至4 月下旬云量小于20%的Sentinel-2 影像,共计326 张,按均值合成影像,定义为冬小麦越冬后Sentinel-2影像。
冬小麦越冬后Sentinel-2 影像的分类结果如表3 所示,制图结果如图6 所示。从表3 可以看出,冬小麦越冬后Sentinel-2 影像的总体精度为86.80%,Kappa 系数为0.83,冬小麦用户精度和生产者精度分别为87.98%和84.75%。从图6可以看出,冬小麦越冬后Sentinel-2 影像提取的冬小麦地块较为完整、光滑。但是冬小麦越冬后Sentinel-2 影像仅为单时相光学影像,只能表示冬小麦某一时刻的生长状态,不能反映冬小麦整个生长周期的光谱特征变化,易受“异物同谱”的影响。冬小麦与林地具有相似的光谱特征,部分道路旁的林地被误分为冬小麦,导致部分道路无法提取或者提取较窄;部分山区的林地被误分为冬小麦,导致山东省冬小麦制图中东部山地地区也有大量冬小麦的存在。对于大范围分布、集中连片的冬小麦种植区,使用冬小麦越冬后Sentinel-2 影像可以取得较好的分类效果;对于地物类型复杂、零星分散的冬小麦种植区,错分与漏分现象严重,存在较大缺陷,作物分类精度有待提高。
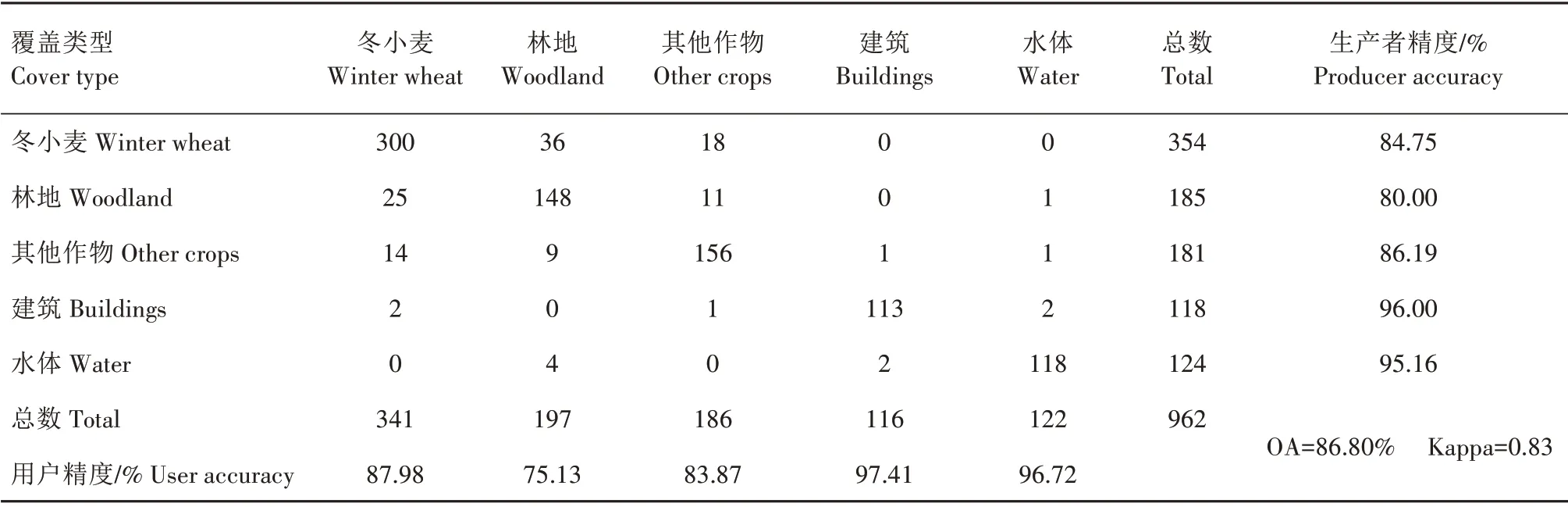
表3 越冬后冬小麦Sentinel-2影像分类结果Tab.3 Sentinel-2 image classification results of winter wheat after overwintering
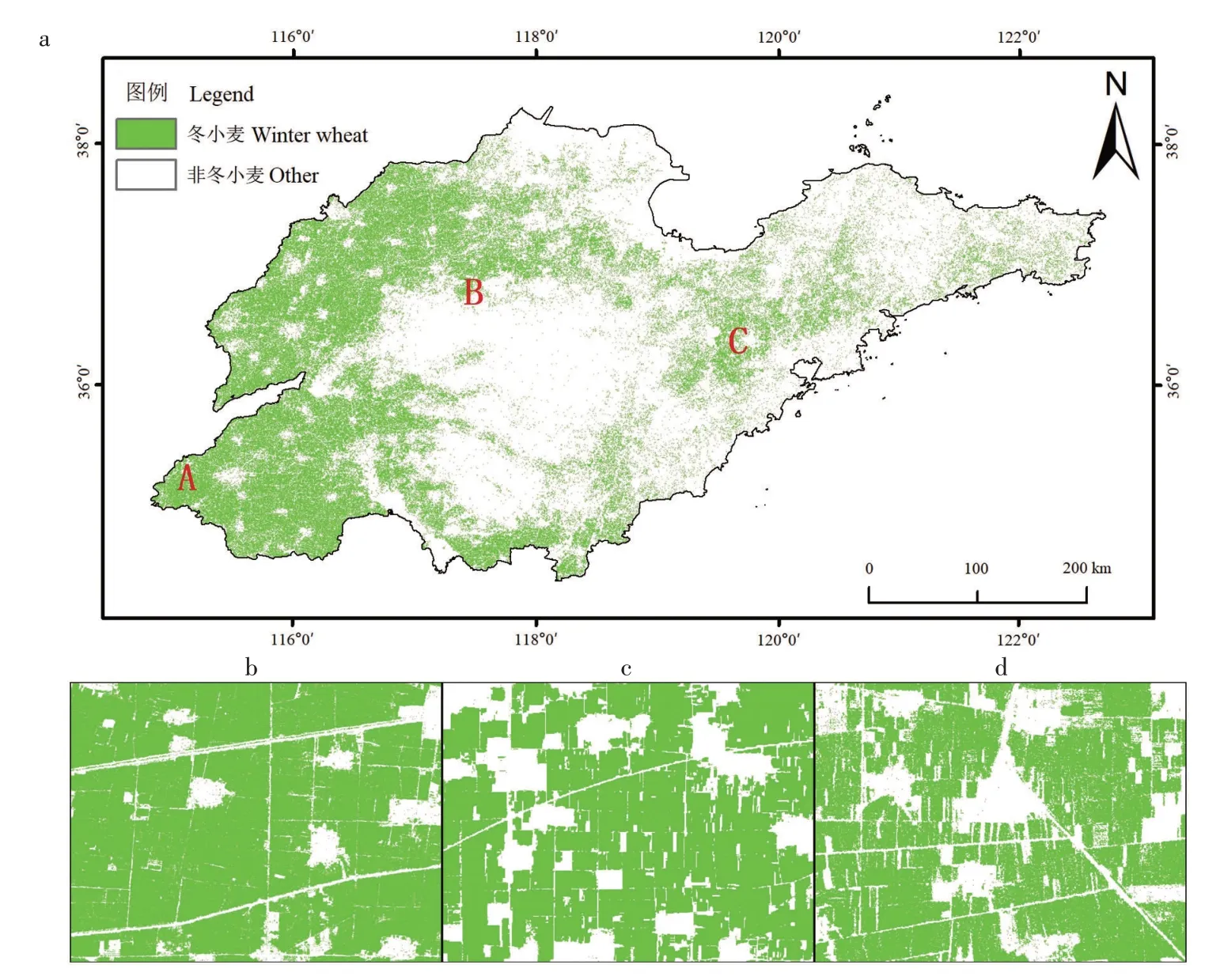
图6 基于冬小麦越冬后Sentinel-2影像的山东省全省和3个示例位置冬小麦制图结果Fig.6 Mapping results of winter wheat by Sentinel-2 images after overwintering in Shandong Province and three example locations
2.3 融合主被动遥感影像分类结果
将全生育期Sentinel-1A 影像与冬小麦越冬后Sentinel-2 影像进行融合,其分类结果如表4 所示,制图结果如图7 所示。从表4 可以看出,融合Sentinel-1A 与Sentinl-2 主被动遥感影像的分类效果最好,总体精度为93.76%,Kappa 系数为0.92,冬小麦用户精度和生产者精度均达到95%以上。相较于Sentinel-1A 影像,总体精度提高12.37 个百分点,Kappa 系数提高0.17,冬小麦用户精度和生产者精度分别提高13.42、9.04个百分点;相较于Sentinl-2 影像,总体精度提高6.96 个百分点,Kappa 系数提高0.09,冬小麦用户精度和生产者精度分别提高8.59 个百分点和10.73 个百分点。融合主被动遥感影像相较于仅使用单传感器影像,各项评定指标均有不同程度的提高,由此可知,融合主被动遥感影像有助于分类结果的改善。从图7 可以看出,融合Sentinel-1A 与Sentinl-2 主被动遥感影像的冬小麦地块边界清晰,道路提取完整,面积大的冬小麦种植地块提取效果良好,零碎的冬小麦种植地块也被提取出来,与冬小麦光谱特征相似的林地以及部分小宗作物被明显区分。这是因为雷达影像包含较多的空间纹理信息,可以反映作物的空间种植结构及其生长变化,光学影像包含丰富的光谱信息,两类遥感影像的结合能够弥补仅使用单数据源遥感影像在农作物分类方面的缺陷,有利于分类结果的改善。
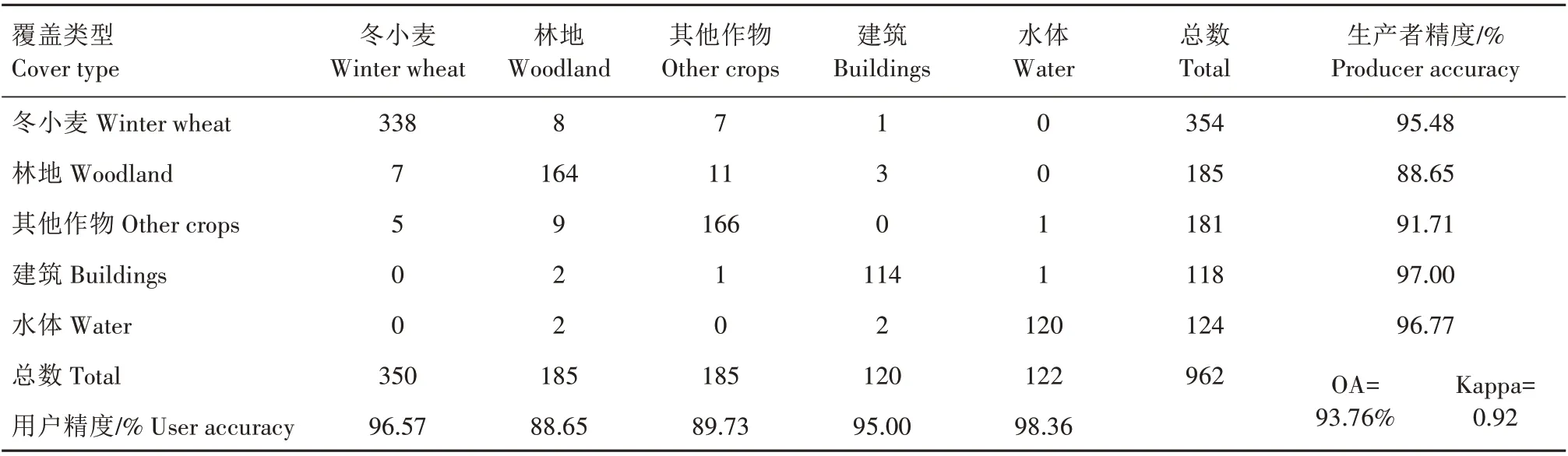
表4 融合主被动遥感影像分类结果Tab.4 Classification results by fusion of active and passive remote sensing image

图7 融合主被动遥感影像的山东省全省和3个示例位置冬小麦制图结果Fig.7 Mapping results of winter wheat in Shandong province and three example locations by fusing active and passive remote sensing images
结合上述制图结果可知,在冬小麦种植面积较大、较为规整的地区,冬小麦分类效果较好;而在种植规模较小、分布零散的地区,冬小麦分类效果较差。由此可知,冬小麦的种植规模和地块的形状对分类效果影响明显。融合主被动遥感影像分类方案的冬小麦分类效果最好,从基于融合主被动遥感影像的山东省冬小麦制图中可以看出,冬小麦是山东省冬季主要作物,主要种植在西南和西北平原地区,呈现集中连片分布特征,中部以及东部由于地形多为山地丘陵,种植较为零碎。
3 结论与讨论
本研究在GEE 环境下,使用Sentinel-1A、Sentinel-2 主被动遥感影像,根据不同类型影像数据分别合成影像,基于随机森林算法,对比分析了单数据源遥感影像与融合主被动遥感影像对冬小麦识别的差异,得到以下结论。
与光学影像相比,雷达影像在任何天气状况下均拥有稳定的数据源。以冬小麦的生育期为时间窗对雷达影像进行合成,可以充分发挥雷达影像不受云雨天气限制的优势。基于冬小麦物候期的Sentinel-1A 图像融合可以为试验提供足够的数据来源,并有助于作物物候指标的构建,以此增强影像信息。本研究表明,利用冬小麦全生育期的雷达影像绘制省级区域冬小麦的空间分布图是可行的。雷达成像技术可以获取各类作物冠层结构和植物含水量的信息[23]。使用全生育期的雷达影像进行冬小麦提取,用户精度和生产者精度均超过80%,这有助于了解冬小麦的空间分布,并为相关部门评估粮食安全提供可靠信息。
以MODIS影像得出的NDVI时序曲线为依据合成冬小麦越冬后Sentinel-2 影像,可以解决大区域高质量光学影像缺失的问题。使用冬小麦越冬后Sentinel-2 影像在一定程度上可以将冬小麦与其他地物进行区分,冬小麦越冬后Sentinel-2 影像分类的总体精度为86.80%,Kappa 系数为0.83。但冬小麦越冬后Sentinel-2 影像仅为单时相光学影像,不能反映冬小麦整个生长周期的光谱特征变化,易受“异物同谱”的影响,致使分类结果中有许多错分。
与使用单数据源影像相比,融合主被动遥感影像的分类效果最好,这是因为雷达影像和光学影像的结合,可以充分发挥两类影像在作物分类方面的优势,进而提高分类精度。融合主被动遥感影像分类的总体精度为93.76%,Kappa 系数为0.92。相较于Sentinel-1A 影像、Sentinl-2 影像,在总体精度上分别提高了12.37、6.96 个百分点、在Kappa 系数上分别提高了0.17 和0.09。在大区域光学影像不足的情况下,集成将光学影像与雷达影像结合可以高效地对冬小麦进行识别。
本研究借助在GEE 云平台上存储的多种长时序遥感数据源生产冬小麦时间序列产品[34]。利用时间序列产品监测冬小麦的时空分布变化可以为政府制定政策提供参考。未来的研究重点是尝试在更长时间序列上进行冬小麦的空间分布提取。本研究将冬小麦的物候特征与影像特征相结合,分别对影像进行融合,提取10 m 空间分辨率的冬小麦空间分布图并且具有较高的精度。这可以为其他的大区域冬小麦制图提供有效的参考。在冬小麦的观测期间,种植的其他经济作物仍会对结果造成一些干扰。而本研究未考虑经济作物造成的干扰。在未来的工作中,将研究分区对作物分布信息提取的影响。
