空冷岛全自动无人值守清洗机器人系统的设计研究
2023-07-17独敬东
独敬东

摘要:该文对直接空冷岛全自动无人值守清洗机器人系统的设计研究,并将研究成果成功应用于电厂2X660MW空冷机组。运行效果证明,本文研究设计的清洗机器人系统性能稳定,可靠性高,消除了原有空冷岛清洗系统的技术安全隐患,使空冷岛清洗真正意义上实现设备运行的自动化和无人化,大大减少了工人的劳动强度,完全杜绝了不安全事故的发生,提高了生产效率。
关键词:空冷岛 智能控制 清洗机器人 全自动无人值守
中图分类号:TP242 文献标识码:A
Design and Research of the Full-Automatic Unattended Cleaning Robot System for
the Air-Cooling Island
DU Jingdong
(Jinneng Holding Shanxi TongHua Electric Power Co.,Ltd., Xinzhou,Shanxi Province, 034100 China)
Abstract: This paper designs and studies the full-automatic unattended cleaning robot system for the direct air-cooling island, and research results are successfully applied to the 2X660MW air-cooling unit of the power plant. The operation effect proves that the cleaning robot system studied and designed in this paper has stable performance and high reliability, eliminates the technical hidden safety hazards of the original cleaning system for the air-cooled island, makes the cleaning of the air-cooling island realize the automatic and unmanned operation of the equipment in the true sense, greatly reduces the labor intensity of workers, completely eliminates the occurrence of unsafe accidents, and improves production efficiency.
Key Words: Air-cooling island; Intelligent control; Cleaning robot; Full-automatic unattended
直接空冷島在运行过程中,由于自身原因会引发各种问题,其中空气中漂浮的灰尘、柳絮等附着在空冷岛的散热器翅片上,阻碍其散热及排气、降低热交换效率、影响发电效率就是最严重的问题之一,所以需要定期对散热器翅片进行清洁处理。常规的空冷岛清洗系统为半自动清洗设备,需要人工干预作业,靠人工拉动高压水管和电缆,使其达到清洗的目的。这种人工控制的方式不利于整个清洗工作,不但费时费力、清洗质量差,而且高压水管和电缆在拉动的过程中易被磨损,甚至被拉断而造成人身伤亡事故发生。直接空冷岛全自动无人化清洗机器人的设计研究成功真正意义上实现自动化和无人化值守,大大减少了工人的劳动强度,完全杜绝了不安全事故的发生,提高了生产效率[1]。
1方案概述
该文通过对机械传动技术及智能控制技术的设计研究,采用齿轮齿条传动增强系统运动机构驱动能力;灵活应用柔性拖链随动装置,避免了胶管和电缆在地面拖拽和人工拖动;增加视频监控系统,方便集控室观察设备运行情况;增加远程控制系统,集控室一键远程控制,实现冲洗设备无人化全自动运行,彻底释放人工,实现设备的智能化。系统结构图示意图如图1所示。
2系统组成
全自动无人化清洗机器人系统主要由以下七个部分组成:高压水泵站、管路及阀门、清洗机器人桁架平台、清洗机器人桁架平台X轴驱动机构、清洗机器人(清洗小车)、智能控制系统。
2.1高压水泵站
高压水泵站提供空冷岛清洗机器人的高压清洗水。高压往复泵进水口接自工厂除盐水(除盐水压力要求0.2~0.4MPa)管路。由于高压往复泵产生的是脉冲水流,如果不经处理直接用于清洗,会对管路产生极大冲击,所以在高压往复泵出口安装一台缓冲器,使得出口高压水能较平稳地流动。
2.2管路及阀门
管路包括母管系统、支管系统、胶管系统组成,管道的材质一律为304不锈钢,耐压为15MPa。
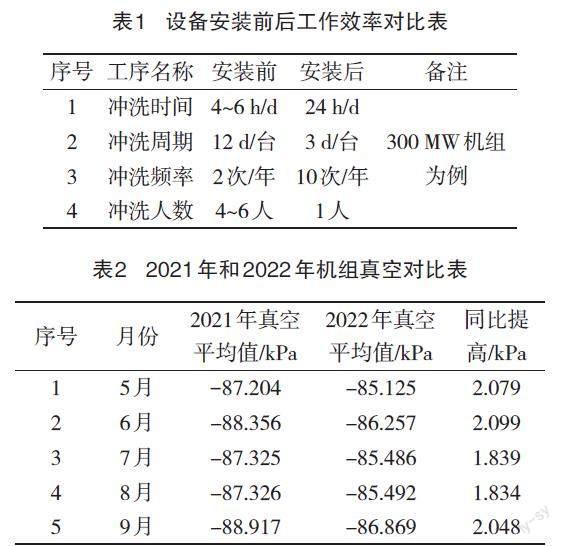
2.3清洗机器人桁架平台
清洗机器人桁架平台主要由高强度铝镁合金桁架、支撑轮、传感器、行程开关、清洗机器人Y轴驱动导轨等组成,外形结构如图2所示。清洗机器人桁架平台每一面散热器配备一台;行程开关防护等级达到IP67,用于检测桁架平台到达两端时自动停止;传感器主要用于检测电机是否过载、桁架平台是否卡住或形变,当出现故障时及时检测并给远程及现场发出报警;位置编码器主要来检测、记载清洗机器人桁架平台X轴(水平)位移[2]。
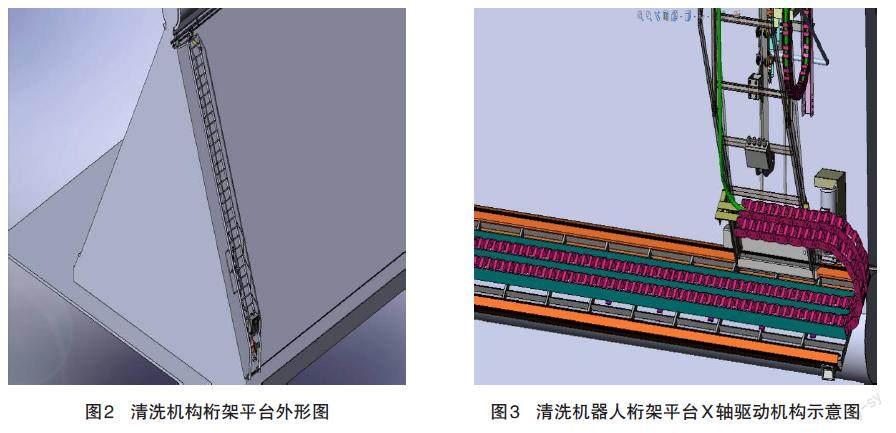
2.4清洗机器人桁架平台X轴驱动机构
清洗机器人桁架平台X轴驱动机构采用齿轮齿条驱动模式,清洗机器人桁架平台的另一端驱动采用随动滚轮。驱动机构主要包含M4齿条、安装基板、齿轮、驱动电机和机构、柔性拖链随动装置,位置编码器、行程开关等,外形结构示意图如图3所示。
图3清洗机器人桁架平台X轴驱动机构示意图
清洗机器人桁架平台X轴驱动机构每一面散热器配备一套;驱动机构由高性能步进电机、位置编码器、减速器、联轴器、驱动齿轮、安裝基座等组成,所有部件均为耐高温、防氧化材料加工而成,系统防护等级极高,驱动机构可以上下调节以适应不同模式下的清洗需求;行程开关防护等级达到IP67,用于检测清洗平台到达两端时自动停止;传感器主要用于检测电机是否过载、清洗机器人桁架平台是否卡住或形变,当出现故障时及时检测并给远程及现场发出报警;位置编码器主要来检测、记载清洗机器人桁架平台X轴水平位移。水平高压胶管及控制电缆安装在拖链中,拖链与清洗机器人桁架平台随动,从而使得高压胶管及电缆与清洗机器人桁架平台同步随动而互不干涉,无需人工干预[3]。
2.5清洗机器人(清洗小车)
清洗机器人由Y轴竖直驱动机构、清洗喷嘴框组件及托架组件、柔性拖链随动装置、行程开关、齿形同步皮带、快换插头等组成,每个清洗机器人桁架平台配备一套,外形结构示意图如图4所示。
Y轴竖直驱动机构由高性能异步电机、减速器、联轴器、驱动轮组件组成,异步电机额定功率为250W,最高耐受温升可达180℃,具备防雨、防腐、耐高温等特点。其他零部件也均由耐高温、防氧化材料加工而成,系统防护等级极高;托架组件是Y轴驱动机构与喷嘴之间的支架平台,主要由皮带张紧轮、支架、轴承组成,材料为不锈钢加工而成,清洗喷嘴框组件主要由清洗框、喷嘴组成,每个清洗框布置上下两排喷嘴,每排有6个喷嘴,共12个,喷嘴选用的是德国莱克勒专用清洗喷嘴,材质为316不锈钢,清洗水暮宽度大于70cm;行程开关防护等级达到IP67,用于检测喷嘴及托架到达两端时,自动切换喷嘴向相反方向行走;齿形皮带,与上下行走机构配合,驱动喷嘴及托架上下移动,每个清洗机器人桁架平台配备一条。高压胶管及控制电缆安装在拖链中,竖直随动由清洗机器人驱动,保护管束翅片不受高压胶管摩擦损坏,配合清洗机器人竖直驱动[4]。
2.6智能控制系统
2.6.1就地控制箱
就地控制箱由箱体、PLC、变频器、操作面板(含按钮)、元器件、指示灯、接插件等组成,每一面配备一台,主要实现以下功能:就地控制清洗机器人的驱动与停止;清洗机器人X轴水平移动、Y轴竖直移动控制水泵启动和停止远程控制;远程/就地控制切换;故障提示及消除;远程控制及驱动接口;人机交互界面实现;系统运行状态显示。
2.6.2远程控制柜
远程控制柜位于空冷岛平台下方电气室,由控制模块、通信模块、电源、液晶显示器、操作面板、指示灯、接插件等组成,主要实现以下功能:系统的控制逻辑中枢、系统网关;连接控制操作终端、变频控制柜、就地控制箱、高压清洗泵变频控制柜之间的枢纽;清洗机器人桁架平台和清洗机器人驱动控制逻辑、状态反馈的控制中心;高压清洗水泵控制逻辑及状态反馈控制中心;电动阀门控制逻辑输出及状态反馈中心;清洗机器人桁架平台和清洗机器人的移动位置检测;行程开关、压力传感器、流量传感器、温度场数据的采集中心;系统运行状态显示;实现就地/远方控制的中枢;配合就地控制箱,系统所有控制信号经就地控制箱接,通过集中DCS可以实现远程所有启动、停止控制[5]。
2.6.3远程控制操作终端
远程控制操作终端位于中控室,独立于电厂原有DCS系统,由工控机、自动清洗控制组态软件、通信系统、电源组成,主要实现以下功能:设置系统控制方式和各种参数,如工作模式设置、清洗机器人桁架平台及清洗机器人移动速度及方向设置、清洗顺序设置、清洗模式设置(精细或粗细)等,自定义清洗模式、局部精确定位清洗;远程控制高压清洗水泵,设置水泵工作参数如压力流量等;远程集中控制清洗机器人运行,系统工作状态反馈显示;采集接收各种传感器参数及各种工作状态报警信息,以提示工作人员进行相应操作;接收温度场在线监测数据、机组运行背压数据、现场环境温度数据,根据这些参数制定系统清洗策略,实现专家级精确定位清洗;接收视觉系统的图像视频,实时监控系统运行状态;可实现设备在线运行状态实时显示,包括设备当前清洗工作状态的实时动画显示、清洗水压和流量实时显示等;可实现设备运行的远程控制,包括设备工作模式选择、手动定点/定速/定压清洗等;可实现设备自动运行的远程设置,包括清洗轨迹任意设定、清洗水压力、清洗设备水平移动速度、清洗设备垂直移动速度等;可实现设备运行的智能化辅助功能,包括本周期清洗时长计算、下次清洗周期时间预估、清洗水压力&清洗速度的最优计算、设备运行故障分析等;可实现设备运行的历史数据存储及统计分析,历史数据包括设备运行时间节点、清洗水压、机组背压、手动操作动作等,统计分析包括设备运行时间统计、用水量计算等,还提供历史曲线显示和打印报表功能;可实现用户权限及操作日志管理,包括指纹用户登录验证、用户增删改查、用户登录日志[6]。
3应用案例
2022年初,我厂进行了该清洗机器人的安装,并测试运行和清洗效果,测试效果对比如下。
3.1提高了工作效率,改善了工作条件
通过表1对比可知,设备安装后大大提高了工作效率,大大减少了工人的劳动强度,完全时间无人化自动化值守,改善了冲洗工作人员的工作条件。
3.2经济效益明顯提高
通过表2对比可知,2022年5~9月份机组真空比2021年同期相比平均提高了1.980kPa,按照每KPa影响煤耗1.85g/kWh,每月单台机组发电量2亿kWh电量,每吨标准煤600元计算,共节约燃煤费用约为1.85g/kWh×2亿kWh×5个月×600元/吨=111万元。
3.3机组运行更加安全稳定
本设备的安装运行,保证了整个夏季空冷岛的冲洗效果,做到了空冷岛散热器翅片表面清洁,保证了洁净度。在连续高温天气下,使机组稳定、经济、满负荷运行,达到了预期的目的。
4结语
空冷岛全自动无人值守清洗机器人系统采用齿轮齿条传动增强系统运动机构驱动能力;灵活应用柔性拖链随动装置,避免了胶管和电缆在地面拖拽和人工拖动;增加视频监控系统,方便集控室观察设备运行情况;增加远程控制系统,集控室一键远程控制,实现冲洗设备无人化全自动运行,彻底释放人工,实现设备的智能化。运行效果证明,本清洗机器人系统性能稳定,可靠性高,消除了原有空冷岛清洗系统的技术安全隐患,使空冷岛清洗真正意义上实现设备运行的自动化和无人化,降低了劳动强度,提高了生产效率,其运行的经济性对空冷技术的发展具有重要的指导意义。
参考文献
[1]吴雪岩.DCS技术在化工过程控制中的应用[J].中国化工贸易,2018(11):36-34.
[2]张彦斌.基于多种供热方式的热电机组运行优化研究[J].山西电力,2020(5):52-57.
[3]毛晓勇.综掘工作面粉尘运移规律及喷雾降尘技术[J].山东煤炭科技,2021,39(3):90-92,98.
[4]余志林,李贵雷,赵顺安.直接空冷凝汽器V型布置与A型布置防风能力对比研究[J].中国水利水电科学研究院学报,2020,18(2):143-148.
[5]侯欣妍.直接空冷凝汽器冬季防冻方案[J]中国新技术新产品,2018(24):51-52.
[6]贺晓怡.直接空冷凝汽器换热表面结构及材料的优化研究[D].太原:太原理工大学,2018.
