全数字式旋转变压器的解码设计
2023-07-15胡卫鹏
胡卫鹏 刘 峰 王 轩
(西安电子工程研究所 西安 710100)
0 引言
角度传感系统的测量精度和响应速度直接影响到伺服系统的运动控制精度。在某些工作环境恶劣的场合,如具有高冲击震动、低温、湿热的条件下,旋转变压器(简称旋变)被广泛地应用于角度传感系统中,军用领域绝大多数伺服系统也都使用旋转变压器作为角度测量传感器[5]。
在激磁绕组输入恒定的正弦电压 Uref ,当单通道旋变的转子旋转时,在定子绕组就会感应输出两组随转子角位置不同而相对变化的正余弦电压 Us_sin,Us_cos。轴角-数字转换器(RDC)就是将旋变输出的模拟信号转换成角位置的数字信号。而角度传感系统的精度主要取决于旋转变压器的精度和轴角-数字转换器(简称RDC)的精度,因此RDC的性能对于角度传感系统的精度至关重要。
轴角数字转换通常使用集成的专用RDC芯片(或模块),另一种是全数字式解码方式,即直接将旋变信号进行A/D转换后,通过处理器软件算法实现角位置解码。RDC芯片不仅要占据一定的体积,且价格昂贵;在某些对体积、重量限制严格的场合(如机载和弹载雷达),全数字式解码方式可以满足体积小、低成本的要求,而且还可以用软件的方式来降低系统的非线性误差。
1 基础理论
旋转变压器的原理如同一个变压器,转子为原边,定子为副边。图1 为一个单通道旋变原理图。E1、E2为转子绕组,可以将激磁信号输入至激磁绕组;S1、S2是正弦定子绕组,C1、C2是余弦定子绕组[2]。
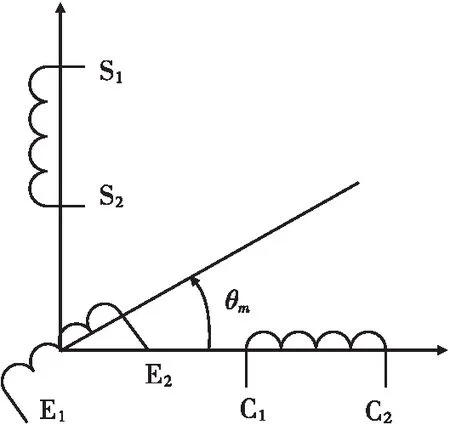
图1 旋转变压器原理简图
设激磁信号为
Ve=Umcos(ωet)
(1)
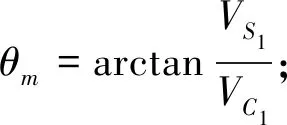
当激磁正弦波信号输入至转子绕组后,在定子绕组上会感应出两组正交的正、余弦电压信号,它们是激磁信号在机械角度θm的调制生成的:
(2)
其中:k——转子匝数/定子匝数;
Um——激磁信号的幅值;
θm——旋转变压器的角位置;
ωe——激磁信号的角频率。
如果旋转变压器角速度ωe与激磁信号的角频率dθm/dt相比足够小,第二项的影响可以被忽略(通常激磁信号的角频率dθm/dt=2000~10000Hz,雷达转台一般ωe<1000rps,fe=ωe/2π=159Hz)。
因此忽略第二项后得到[3]:
VS=kUmsinθmcos(ωet)
VC=kUmcosθmcos(ωet)
(3)
即正余弦输出信号的幅值对应了转子的角位置,对应关系见图2所示,因此可以对正余弦信号进行解调来计算出角位置[1]。
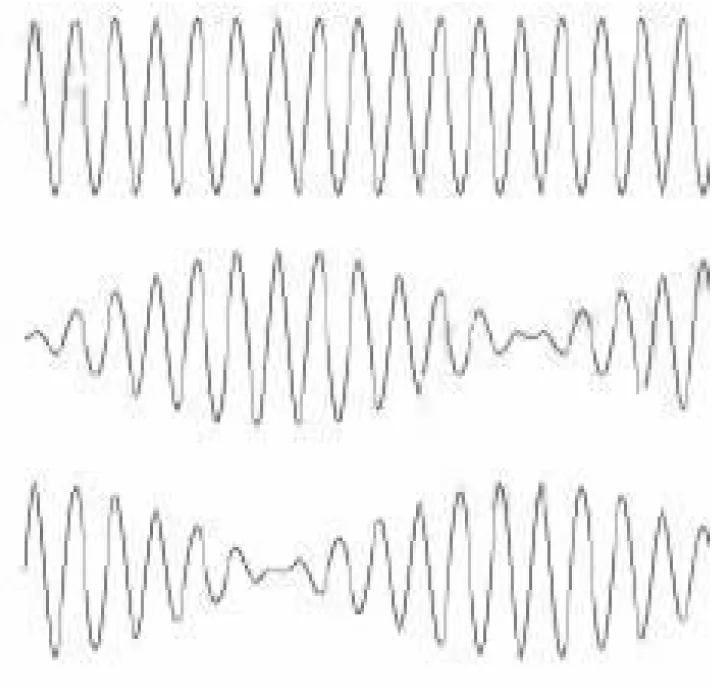
图2 激磁信号(上)与输出信号sin(中)、cos(下)对应关系图
2 算法设计
本文采用反正切法作为角度信号解算算法。反正切法是直接对正、余弦输出电压信号进行采样,它们的比值就是对应角度的正切值,再对此值用四象限反正切函数解算即得到角位置值[6]。此算法原理简单,角度测量实时性高。
3 电路硬件实现
全数字 RDC的硬件电路相对简单,主要功能是由软件算法实现,但是为了验证其功能及性能,板上也设计了 RDC 芯片-RD19230的硬件电路。本系统选择处理器是湖南进芯电子科技有限公司自主研发的DSP数字处理芯片AVP32F335QP176S,它的最高运行频率是 150MHz,外围接口丰富。AD采样选用DSP的片上AD,通信电路将DSP读取的角度值发送到上位机,方便数据保存和分析。系统硬件组成见图3所示。
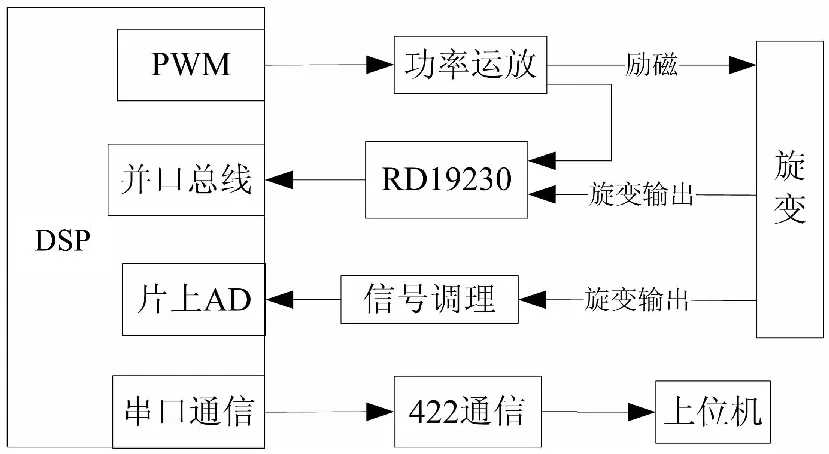
图3 系统硬件框图
DSP片上AD采样范围为0~3V,需将将旋转变压器的激磁、SIN/COS输出信号调制到AD采样范围内,SIN/COS输出信号的零位电压调制到AD的中点1.5V,1.5V基准电压产生电路见图4所示。

图4 1.5V基准电压产生电路
DSP产生一路互补SPWM信号,该信号经过差分放大、二阶滤波和功率放大后,做为旋变的激励信号,并输入至RD19230;同时此信号还要经过调理后输入至DSP片上AD。激磁产生电路见图5所示。
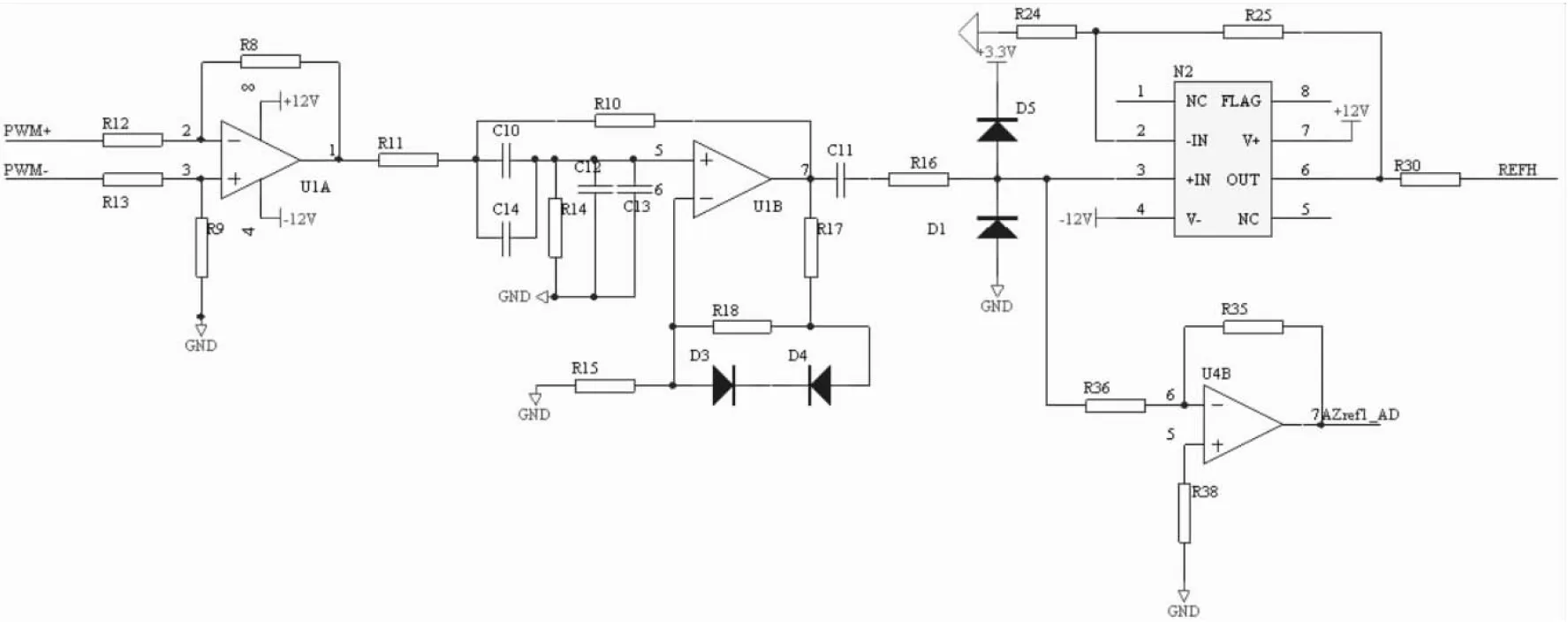
图5 激磁产生电路
为提高采样精度,将旋转变压器的激磁、SIN/COS输出信号采用过采样。AD采样周期为2μs,16路片上AD顺序采样,定时中断执行。每个周期旋转变压器的SIN和COS输出信号在DSP内部6倍过采样,旋转变压器的激磁信号2倍过采样。DSP片上AD电路见图6所示。

图6 DSP片上AD电路图
为进行对比实验,DSP需读取RD19230的旋变解调值,具体硬件电路见图7所示[4]。

图7 RD19230的硬件电路图
4 电路软件实现
4.1 激磁信号的产生
SPWM波由DSP的EPWM单元实现,软件建立正弦波的半周期数组,单元数为50个。基波频率为100kHz,这样,输出载波频率为2kHz。
4.2 全数字 RDC软件实现

5 实验结果
实验采用单通道旋变作为测角对象,旋变激磁输入波形如图8所示,旋变定子SIN输出波形如图9所示。由图8和图9可知,系统输出的激磁波形平整、畸变小,且激磁频率为2kHz。
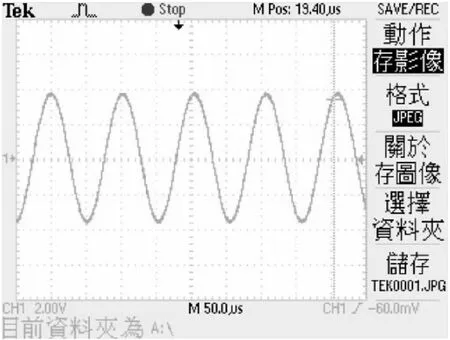
图8 激磁输入波形
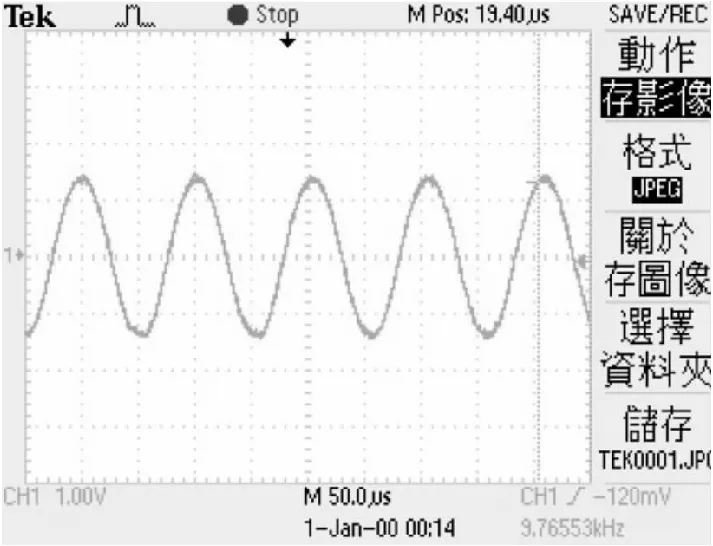
图9 旋变粗机SIN输出波形
对旋变定子的输出信号进行全数字式轴角-数字转换,将其所得结果与轴角转换芯片 RD19230硬件转换结果进行对比。其中RD19230分辨率为14位, 虽然DSP片上AD的分辨率为为12位,但信号经过了6倍过采样,实际分辨率已大于14位。
表1为旋变测角系统的实测数据,可以看出全数字RDC角度与RD19230的角度读数的误差控制在0.03°以内,可以满足一般系统需要,精度较高。
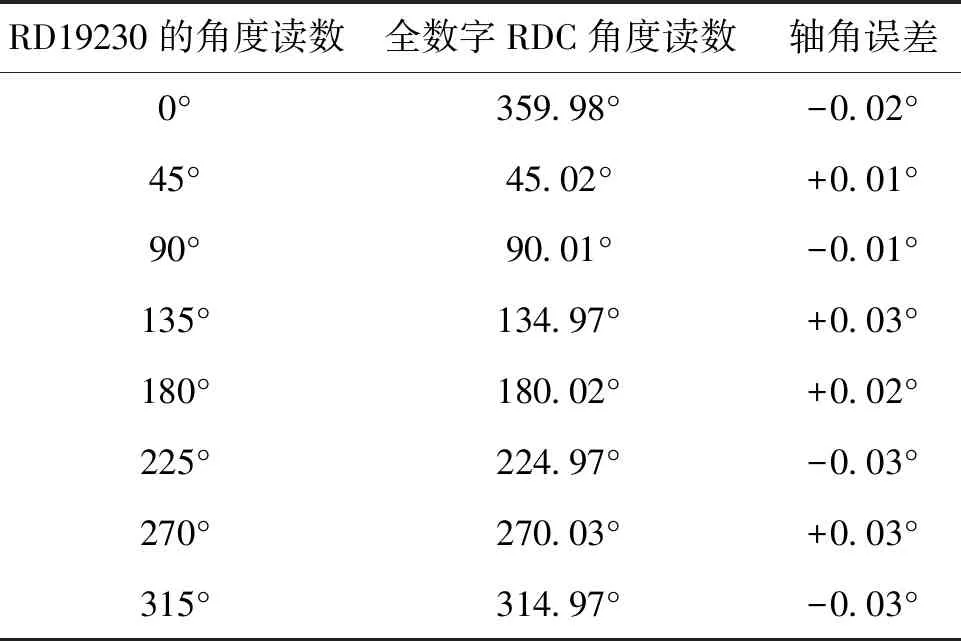
表1 实验测角数据
6 结束语
本设计根据理论分析,搭建了基于DSP的全数字轴角-数字转换的软、硬件平台,将复杂硬件用软件来实现,不仅节省空间、节约成本,而且对于非理想的旋变信号还可以设计灵活的误差消除算法,从而提高了系统的稳定性。实验结果证实了本文所研究的全数字RDC算法可以应用于某些小体积(如机载、弹载雷达系统),中低转速的测角场合。
