基于物联网的智能垃圾回收装置设计与实现
2023-07-14王语琦杨傲冉杨梓欣陆雪夏羽妍
王语琦 杨傲冉 杨梓欣 陆雪 夏羽妍


【摘 要】 文章基于推广垃圾分类的政策背景,结合市场需求,利用技术支持,自主设计、研发出具有感应和图像采集、垃圾识别、分类处理、溢满和语音播报功能的智能分类垃圾桶。该装置以树莓派开发板为核心,集成太阳能电池板、红外感应器、舵机、托盘、超声波传感器和箱体等硬件。各部件之间有所联系、相互配合,最大限度地实现了垃圾处理的便捷化、智能化。
【关键词】 智能分类垃圾桶;垃圾分类政策;Arduino传感器;树莓派开发板
垃圾分类是当前社会关注的热点话题,目前,我国有将近三分之二的城市面临着“垃圾围城”、垃圾处理投入过大等问题。
2020年,我国开始逐步推广垃圾分类政策,选出了46个重点城市开展垃圾分类,并要求各地基本建成垃圾分类处理系统。自2019年7月起,上海市政府率先“领跑”,在全国首先开展垃圾分类,并支持垃圾分类的设施建设和技术提升。2021年,全国300多个地级以上城市、5000多个街道和10万个以上的社区,已全面推行了生活垃圾分类制度,市场消费规模达1.3万亿。如果以智能垃圾分类设备为社区的切入口,将获得高频的使用黏性、垂直用户和私域流量,市场前景广阔。
基于以上社会现状,本研究设计了一款以前端投递便捷化、中端分类资源化、后端处理高效化和垃圾分类全民化为目标,具有感应和图像采集、垃圾识别、分类处理、溢满和语音播报功能的智能分类垃圾桶。该装置主要面向家庭住户市场,旨在进一步改善居民垃圾分类的困境,提高资源的利用率,共建良性的生态系统。
一、智能垃圾回收装置的总体设计与实现
智能分类垃圾桶包含了硬件和软件两大系统。硬件系统包括树莓派开发板、USB摄像头、红外感应器、舵机、托盘、超声波传感器和箱体等。垃圾桶的上层为技术核心部分,负责感应识别,与垃圾桶的中层、下层协调配合,共同处理垃圾,实现了垃圾的智能自动分类,如图1所示。
软件系统分为感应和图像采集系统、垃圾识别系统、分类处理系统、溢满和语音播报系统。其中垃圾识别系统是智能垃圾桶实现分类功能的核心。当USB摄像头拍摄了垃圾图像后,会将图像信息传送至Arduino传感器,Arduino传感器先对信息进行初步的分析解读,再将所有的数据信息发送至树莓派管理系统。树莓派系统将接收的图像信息与数据库中的相关信息进行匹配,再将分类信息发送至Arduino传感器,Arduino传感器带动舵机转动,实现垃圾分类。
二、智能分类垃圾桶硬件系统的设计与实现
智能分类垃圾桶的硬件端包括树莓派开发板、USB摄像头、太阳能电池板、红外感应器、舵机、托盘、超声波传感器和箱体等。各部件之间的功能都具有依存关系和主次关系,以实现多功能的配合,并完成指令。如先由摄像头进行拍照,智能垃圾桶进行智能识别后,确定垃圾的种类,再進行分类处理,投放垃圾到相应的箱体。
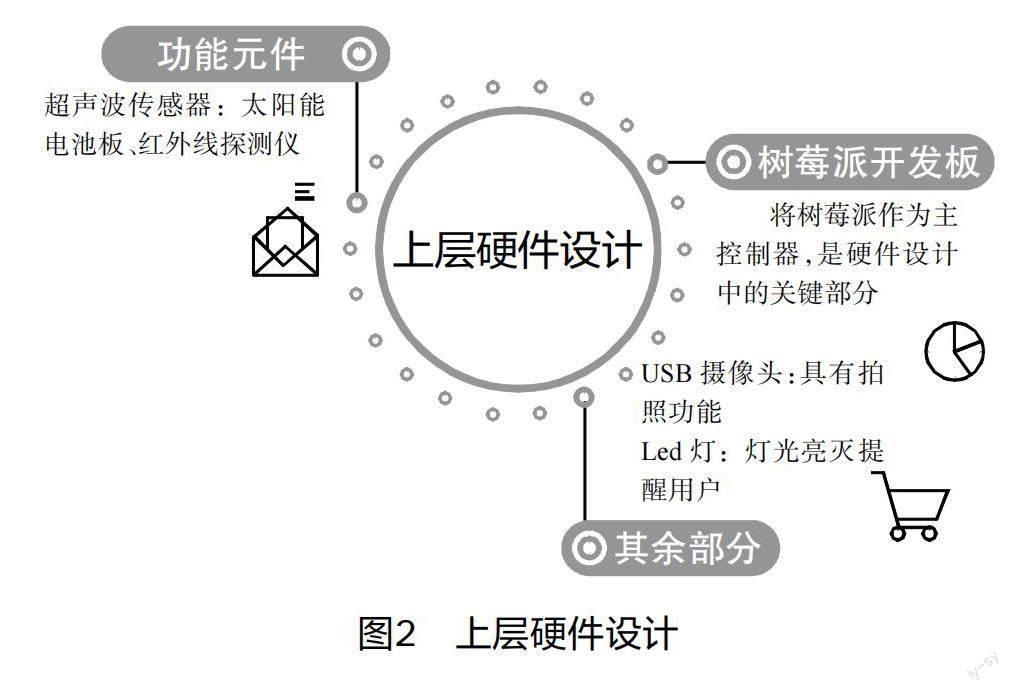
(一)上层硬件设计
垃圾桶的上层硬件主要有树莓派开发板、超声波传感器、USB摄像头、LED灯、太阳能电池板、超声波传感器和红外探测仪等。其中树莓派开发板为智能垃圾桶的技术核心部分,负责感应识别,并与垃圾桶的中层、下层协调配合,共同处理垃圾,实现垃圾的智能自动分类,如图2所示。
1. 主控制器
树莓派开发板作为主控制器,是硬件设计的核心部分,可以在USB摄像头拍摄图片后,处理图像信息。树莓派和Arduino传感器主要通过串口进行通信,首先Arduino传感器接收由树莓派处理、分析的图像信息结果;然后树莓派将图像存放在数据信息库中进行比对,并将比对结果交给Arduino传感器处理;最后Arduino传感器给舵机输出一个PWM信号,驱动舵机转动一定的角度,通过程序设定复位舵机,由此垃圾的分类流程基本完成。
2. 超声波传感器
超声波传感器通过感应处理系统判断垃圾的总量。通过超声波感应检测,超声波传感器可以判断垃圾桶中的垃圾是否为溢满状态。在用户每次投放垃圾之前,传感器都能进行及时的判断,行使检测感应功能。
3. USB摄像头
该装置使用的摄像头带有USB接口,具有良好的兼容性,采用了超高清对焦摄像镜头,可360度自由旋转,机身轻量化、易于旋转,可以及时地记录垃圾图像。
4. 太阳能电池板
太阳能电池板为多晶硅太阳能电池板,转换效率≧20%。智能垃圾桶本身携带的太阳能电池板提供主要能量,基本无需用户再进行充电。
(二)中层硬件设计
智能垃圾桶的中层硬件包括Arduino传感器、舵机模块和溢满提示模块。
1. Arduino传感器
Arduino传感器负责接收树莓派系统反馈的图像信息,控制舵机的运行,以此指派垃圾投入对应的箱体中。Arduino传感器是实现垃圾分类的关键部分,连接着决策端的树莓派和执行端的舵机箱体。
2. 舵机模块
舵机模块包括舵机和托盘,主要使用两个舵机控制托盘的左右和上下移动:通过左右移动,将垃圾运载到相应的箱体上方;通过上下移动倾倒垃圾,实现自动、精准地投放垃圾。舵机在工作的过程中,主要负责托盘的移动和开合。
3. 溢满提示模块
溢满提示模块包括超声波传感器、LED灯和扬声器。超声波传感器内置于托盘底部,用于判断桶内的垃圾是否溢满。当托盘每次左右移动时,超声波传感器会向箱体的内部发出声波,以判断该箱体的状态,如满、空或半满。当超声波传感器监测到垃圾溢满时,会激发溢满警报,此时LED灯亮起红色,扬声器发出语音播报。
(三)下层硬件设计
智能垃圾桶的下层硬件包括4个箱体,分别为有害垃圾箱体、可回收垃圾箱体、干垃圾箱体和湿垃圾箱体。
三、软件系统的设计与实现
在该智能垃圾装置的软件系统方面,设计集成了下述系统:
(一)感应和图像采集系统
感应和图像采集系统的运作流程设计:先建立垃圾图片信息库,对数据进行初步分类,再将数据上传到智能垃圾桶的数据库中,并对数据进行深度计算和分析,形成数据文件和垃圾分类图像模型文件。当用户靠近垃圾桶时,红外感应器将感应到人体发射的红外线,并向Arduino传感器发出信号,Arduino传感器做出响应,驱动舵机,转动带动感应门,垃圾桶盖打开,用户投放垃圾。同時智能垃圾桶设置有自动感应开关、手动、脚踏的开盖功能,确保这三种方式都能打开垃圾桶的上盖。当垃圾进入拍照区时,感应和图像采集系统将启动自由旋转的USB摄像头拍摄垃圾图像,将采集的图像处理、量化为数字信号,并发送到垃圾识别系统。感应和图像采集系统的运行流程如图3所示。
(二)垃圾识别系统
垃圾识别系统是智能垃圾桶实现分类功能的核心。USB摄像头在拍摄了垃圾图像后,将图像信息传送至Arduino传感器,Arduino传感器先对信息进行初步的分析解读,再将所有数据的信息发送至树莓派管理系统。树莓派将接收的图像信息与数据库的相关信息进行匹配,实现垃圾鉴别。如果垃圾不能被正确标识出,智能垃圾桶系统会发出警告声音,表明无法标识,并要求人工重新设置该垃圾的类别,一旦分析出正确的垃圾类别,即可启用分类处理系统。垃圾识别流程如图4所示。
(三)分类处理系统
分类处理系统由箱体、树莓派、舵机和隔板等组成。为了提高垃圾信息识别的准确率和效率,本研究还在箱体内安装了LED灯带,用于改善箱体内的照明情况,便于使用者在阴暗环境或夜间场所快速识别出该垃圾桶,灯带也可以作为光源外附在垃圾桶上进行广告宣传。分类处理系统识别了垃圾信息后,由智能垃圾桶对Arduino开发板发出相关指令,打开对应的垃圾舱门,并控制舵机将垃圾放入对应的垃圾桶,由此实现垃圾的自动分类。
(四)溢满和语言播报系统
溢满和语言播报系统通过位于托盘下方的超声波传感器来确定箱体是否溢满,在每次投放垃圾前,相应的传感器都会提前检测箱体的状态,如果溢满,该系统会进行语音播报,提示用户无法投放垃圾,必须先倾倒垃圾桶。该语音播报功能由电子自动发声读音器实现,读音器的放大电路采用了运算放大集成模块,可以保证其结构简单、音色清晰,便于为用户提供精准、清晰的结果。
四、结语
本研究设计的智能分类垃圾桶弥补了市场的空缺,满足了不同用户的需求。该装置预想的受众主要以家庭为单位,属于小型分类垃圾桶,普及了垃圾分类,增强了用户的环保意识,解决了因标准繁多造成的垃圾分类困难。鉴于各个地区的垃圾分类方式和标准有所不同,该产品将客户群体按地区进行分类,并提供相应的地区垃圾分类服务。
该装置以太阳能板为电力来源,减少了电力负担,更环保节约,契合了绿色发展的理念。考虑到天气情况等综合因素,智能分类垃圾桶将自动充满电量,以实现持续、稳定的工作,确保续航持久,减少了电力不足的情况。
参考文献:
[1] 袁海洋,祁悦,祁雯. 社区“互联网+垃圾分类”服务设计研究[J]. 价值工程,2022,41(24):19-21.
[2] 段志杰. 智能分类垃圾箱及实现分析[J]. 智能城市,2018,4(11):37-38.
[3] 赵婉旭,孙悦美,史耀军. 智能分类垃圾桶设计[J]. 工业设计,2022(07):62-64.
[4] 段昆昕,江秋仪,陈锋楠,等. 基于树莓派下智能分类垃圾桶设计[J]. 中国新技术新产品,2022(01):37-39.
[5] 胡耀,王栋,马龙,等. 基于图像处理的智能分类垃圾桶的设计[J]. 电子测试,2022,36(20):23-25.
[6] 丛笑,曾庆祎,韦颖. 智能分类垃圾处理系统设计[J]. 无线互联科技,2022,19(09):65-67.
[7] 王曙光,姜鹤明,张珊珊,等. 城市智能分类垃圾桶设计分析与研究[J]. 现代工业经济和信息化,2022,12(02):76-78.
[8] 孙宝洁,刘伟,魏惠芳,等. 智能“叫醒”分类垃圾桶[J]. 电子世界,2021(24):84-87.
