火箭橇抛撒物轨迹的异面交汇最短距离测量法
2023-07-12申晓敏杜剑英马方远范秋亚
申晓敏,杜剑英,马方远,李 超,范秋亚
(中国兵器工业试验测试研究院,陕西 华阴 714200)
0 引言
随着火箭橇试验技术的发展,越来越多的被试品级间分离、子弹药抛撒、飞机座舱通道清理、座椅弹射等技术验证借助火箭橇试验平台开展。为了验证分离机构的可靠性、有效性和抛撒时序的正确性,状态的稳定性,其分离、抛撒运行轨迹是性能考核的主要参数,因此,对其分离和抛撒轨迹的准确、高精度测试和运动过程清晰成像至关重要,急需探索对火箭橇试验分离、抛撒物三维轨迹测量的更优方法。
目前火箭橇试验抛撒物的轨迹测量方法主要有光电经纬仪测试法[1]、倒GPS北斗法测试法[2]以及高速摄像接力拍摄法[3]。光电经纬仪测试法在实际靶场火箭橇试验测试中的主要问题是火箭橇贴地飞行,其受限于场地条件,满足光电经纬仪交汇条件的理想测试点位较难选取,且试验过程中火箭尾焰几乎全程存在,产生的杂波很大,跟踪测量的轨迹图像清晰度无法有效保证[4];倒GPS北斗法测试法的主要问题是需要在抛撒物上加装GPS北斗信号发射装置,影响抛撒物真实状态,且成本高昂;高速摄像接力拍摄法是一种操作简单、精度较高的测试方法,但是从参考文献中可知,现有的高速摄像接力拍摄法存在两个问题:一是忽略了视觉影响,即同一物体在高速摄像成像的大小会因物距的不同而变化;二是由于测量误差的存在,很难在三维空间中真正交汇到一点。针对以上问题,本文在高速摄像接力拍摄法的基础上,分析了视觉影响,提出基于异面交汇最短距离的高速摄像测试方法。
1 测试方法
在火箭橇试验有抛撒物的轨道一侧,布设高速摄像阵,使用对应的高速摄像机正交交汇的方法,完成抛撒物的轨迹测量,如图1所示。高速摄像阵分A、B两组,分别布设在抛撒物飞行区域的两侧,拍摄角度与火箭橇轨道锐角夹角为45°时最佳,所有的高速摄像机拍摄幅率、视场大小设置一致,并有重叠,比如两组的1号机拍摄视场为标记1至标记3,2号机为标记2至标记4,高速摄像阵的观测交汇区域应覆盖抛撒物飞行区域[5]。高速摄像机距轨道的垂直距离约为标记距轨道垂直距离的10倍以上,将所有的高速摄像机都接入同步触发时统,保证当火箭橇运行至标记点区域时,可同时触发两组高速摄像机,使其有相同的时间零点,便于后续数据处理有统一的时间基准。为了数据处理时的简洁性,标记采取等间隔标记的方式,且所有标记距离火箭橇轨道的垂直距离相等,使用的标杆高度也相等,所有标记所在平面称为标记平面(高速摄像机靶面)。
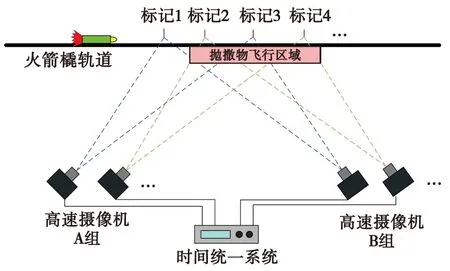
图1 测试系统组成图Fig.1 Test system composition diagram
2 测试原理算法模型
以火箭橇轨道标记点1为坐标原点,火箭橇运行方向为x轴正向,垂直于火箭橇轨道面向上为y轴正向,按照右手法则,建立空间直角坐标系,这里称之为世界坐标系,设标记点i的坐标为Pi(xi,0,0),第j组交汇的两台高速摄像机正交,镜头坐标分别为GAj(xAj,yAj,s)与GBj(xBj,yBj,s),s为高速摄像机镜头距离标记平面(高速摄像机靶面)的垂直距离,抛撒物的空间坐标为Q(x,y,z)。
假设抛撒物同时出现在A、B两组高速摄像机的第j组机的视场,其在这两台高速摄像机画面的像点坐标分别为QA(xA,yA,0)与QB(xB,yB,0),这里的像点坐标是以抛撒物的几何中心计算[6],如图2所示。
由空间直线方程的点向式,可以得到两台高速摄像机的观测直线方程lAj与lBj:
(lAj,mAj,nAj)与(lBj,mBj,nBj)为直线lAj与lBj的方向向量,可由高速摄像机坐标GAj(xAj,yAj,s)与GBj(xBj,yBj,s)和其像点坐标QA(xA,yA,0)与QB(xB,yB,0)求得,求解结果如下:
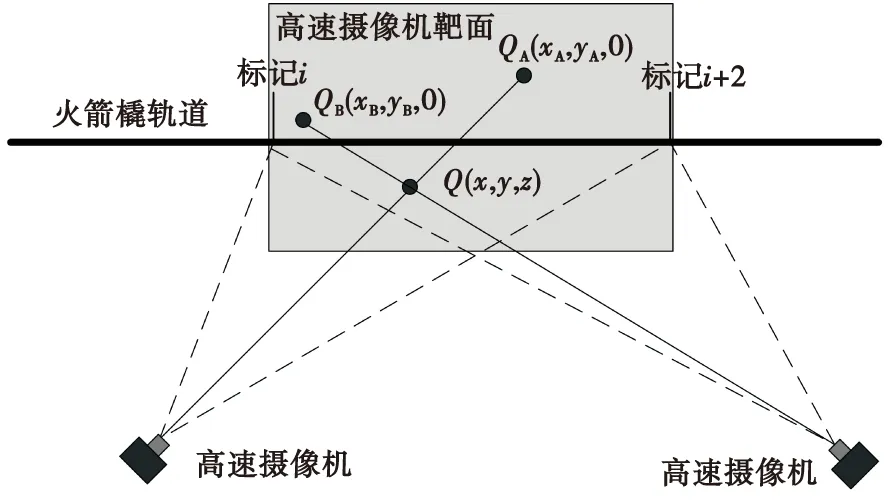
图2 高速摄像机交汇轨迹测量示意图Fig.2 Measurement diagram of intersection trajectory of high-speed camera
像点坐标的求解需要将像点从相机的像素坐标系转换至世界坐标系。以求解像点坐标QA(xA,yA,0)为例,如图3所示,建立高速摄像机的像素坐标系,可以得到标记i、标记i+2以及抛撒物几何中心QGA的上下边缘的像素坐标:(x0上,y0上),(x0下,y0下),(x2上,y2上),(x2下,y2下),(xQA,yQA),(xQA下,yQA下),在将像素坐标转换到世界坐标系时[7],首先假设高速摄像机拍摄的图像像素,在空间代表的大小与高速摄像机拍摄时镜头距离物体的距离为线性关系,忽略视觉在垂直方向带来的影响(垂直方向的标杆难以架设,在此方法下,垂直方向的视觉影响很小),则QGA点在世界坐标系的坐标可表示为
(1)
式(1)中,h为标杆的高度。
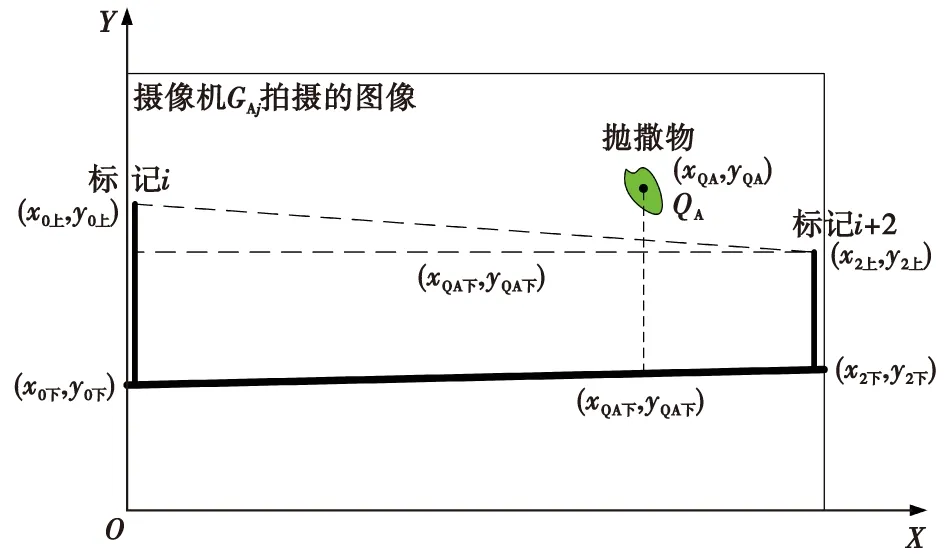
图3 像素坐标系示意图Fig.3 Pixel coordinate system diagram
理论上,直线lAj与lBj相交于Q点,但是,由于测量误差的存在,求解得到的直线lAj与l2j往往不能相交,在没有任何风险偏差的情况下,可以认为Q点位为距离直线lAj与lBj最近的点。利用空间几何,Q点到直线lAj与lBj的距离可以表示为

(2)
式(2)中,
将式(2)记为CX=B,其中:
X=[x,y,z]T,B=[b1,b2,b3]T。
由线性代数知识,|C|≠0知,上述方程有唯一解,可由下式表示:
x=|C|1/|C|,y=|C2|/|C|,z=|C3|/|C|。
(3)
式(3)中,
3 试验验证
将本文提出的方法应用于飞机座舱通道清理火箭橇试验,用于拍摄处理座舱盖破裂抛放的三维运行轨迹。试验时事先在座舱盖上某处作标记,将其作为被观测的对象,当橇体运行至预先布设的高速摄像机视场范围内时,开始拍摄到座舱盖破裂抛放的舱盖碎片(重点关注被标记的部分),利用高速摄像阵列拍摄舱盖碎片运行的三维轨迹。
试验前,首先对精度进行标定,由于火箭橇试验抛撒物三维动态轨迹目前没有高精度的标定方法,这里只对本文所述的方法进行静态精度标定[8]。静态精度标定相对于动态标定,差别主要是忽略了两台交汇测量高速摄像机在统一时统触发下,其触发不同步带来的误差。在火箭橇试验中,同步触发时统精度为1 μs,结合火箭橇运行最高速度,如为1 200 m/s,则因时统同步精度1 μs带来的运行误差为1.2 mm,由于抛撒物的初始速度与橇体运行速度相当,因此在考虑时统误差的情况下,两台交汇测量的高速摄像机拍摄的抛撒物轨迹最大误差为毫米级,可以忽略不计。因此,使用静态精度标定,一定程度上可以代替动态精度标定。
标定的方法主要为本文所述的方法,测量两台交汇测量高速摄像机拍摄的图像中标记i+1处的标杆上下顶点坐标,标杆的位置使用钢卷尺进行精确测量,标杆的垂直度使用铅垂线进行标定,世界坐标系的原点、高速摄像机的位置坐标使用高精度差分GPS进行测量。表1为某次试验前,对测试系统进行精度标定的测试结果,坐标单位为dm。

表1 静态精度标定结果Tab.1 Static precision calibration results
由表1可见,标定精度为厘米级,最大误差约为1.1 cm。而文献[2]提出的倒GPS北斗法测试法给出的平面精度优于0.1 m,高度精度优于0.2 m;文献[3]提出的高速摄像接力拍摄法给出的测试精度为0.5 m。这两种方法给出的精度均为分米级,因此,本文提出的方法其测试精度相较文献[2—3]可提高一个数量级。
试验后,利用本文所述的方法对标记的舱盖碎片运行轨迹进行分析处理,处理结果如图4所示。
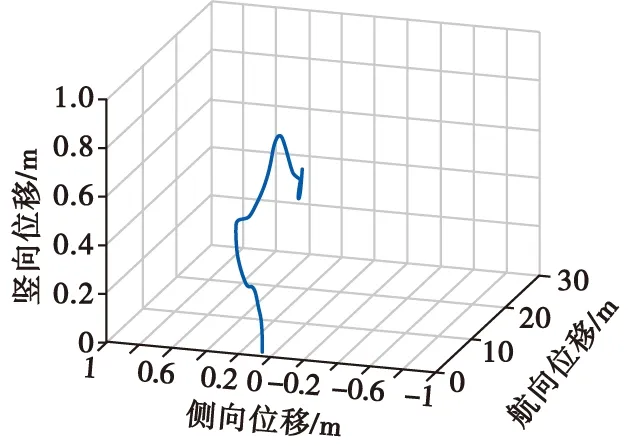
图4 舱盖某碎片运行轨迹处理结果Fig.4 The processing result of the trajectory of a piece of hatch cover
4 结论
本文针对火箭橇试验中对分离对象、抛撒物三维运行轨迹的高精度测试需求,提出一种基于异面交汇最短距离的高速摄像测试方法。采用摄像机阵列交汇的方式,在分析视觉影响的基础上,建立了基于最短距离的高速摄像交汇测试算法模型,通过标定,成功应用于飞机座舱通道清理火箭橇试验座舱盖破裂碎片抛放的三维轨迹测试,并利用本文的数据处理方法进行分析,获取了准确的舱盖碎片三维运行轨迹。试验结果表明,本文提出的方法测试精度高,可广泛应用于分离类、抛放类火箭橇试验的分离对象、抛放物三维运行轨迹的精确测试。
