复杂流场中五孔探针测点加密方法分析
2023-07-11谢金伟刘存良
郭 涛,许 元,张 京,谢金伟,刘存良
(1.西北工业大学 动力与能源学院,陕西 西安 710129;2.西安航天动力研究所,陕西 西安 710100;3.中国航空发动机集团有限公司 四川燃气涡轮研究院,四川 成都 610500)
0 引言
在流体机械和推进系统的研究中,往往需要通过试验测量的方式获得流动区域的流场结构。五孔探针是最常用的测量工具之一,通过将流体在探针头部绕流形成的压力分布引出,按照压力分布与流动参数之间的关系计算得到流场测点处的总、静压和方向角等[1-2]。
五孔探针作为一种点测量技术,其所得到的流场信息依赖于测点位置,探针的测点位置一般根据经验来选取,如在测量环形出口的稳态参数时,周向一般选用“水”字形或“米”字形探针布局[3]。为了获得流场的真实情况,尤其是流场变化剧烈的区域,一般情况下,实验人员会在条件允许下尽可能多地布置测点[4-5]。2013年实施的非强制性国家标准《航空燃气涡轮发动机轴流涡轮气动性能试验方法》中规定,涡轮级间压力测点沿径向的最小测点数量,依据叶高不同,3~7个不等[6]。
出于对测量时间、成本和流道结构限制的考虑,往往对于测点数目的上限又有着一定的限制,而测点一般是均匀布置,导致相邻测点的间距较大时,未布置测点区域的参数一般为附近测点参数在该区域的插值结果,这种方法在均匀稳定且没有微小流动结构的流场中是可行的,但是当流场存在速度剧烈变化区域或者微小流动结构时,这种测量方法可能会捕捉不到参数的变化过程,使得测量结果与真实流场存在差异,甚至完全丢失一部分流场信息。
多孔探针在流体机械中的测点布置的研究大多集中在测点的数目上。付少林等研究了测试布局对涡轮效率的影响,研究表明,沿周向测点越多,误差越小,测点数大于5时,误差可以忽略不计,径向测点布置也呈现同样的影响规律,最佳径向测点数为7~10个[7]。Schneider等通过数值模拟的方式研究了测试布局对涡轮参数测量的影响,认为径向测点数至少应大于5个[8]。Schmitz等在某高负荷低压涡轮的设计实验时,沿径向在入口和出口各布置6个和8个探针[9]。Stoll等使用8梳40点的测试布局,总压误差小于1%,结果表明,当测量点数减小时,测量误差就会增大[10]。这些研究均表明,在流体机械中,测点数目的多少直接关系到结果的误差大小。但是大多数的测点布置采取的是均匀布置的方案,若能开发出一种新的测点布置方法,使其能根据被测流场的初步测量信息,自动判断梯度区域、涡系、激波等流场中的重要流动特征的出现位置,对流场的测点布置进行有针对性的加密并进行二次测量,达到流动平缓区域测点稀疏,流动参数变化剧烈的区域测点稠密的测点布局,将大大提高测试效率,改善测试结果。
根据流场初步信息进行分析点加密的思想在计算流体力学的网格自适应加密中也有采用。由于网格自适应方法的目标也是实现流动平缓区域网格稀疏,流动参数变化剧烈的区域网格稠密,测点加密方法可以借鉴网格对于流场信息的自适应加密方法。在现有网格自适应的诸多方法中,对已有网格进行切分是最有价值的借鉴选择[11-12]。切分策略的选择会导致不同的自适应结果,切分后的网格既要能够捕捉流动的显著变化特征,又要考虑计算的稳定性,相邻网格的体积不能有太大的变化,流场中的不同区域可能需要不同的流动特征探测方法[13-14]。切分策略中最为常用的是Dannenhoffer所提出的方法,采用不同流场参数的一阶差分和二阶差分作为网格细化参数,得到了不同的细化网格,细化参数阈值是通过统计不同阈值所需的细化网格百分比得到的[15-16]。结果显示,该网格自适应方法仅增加12%~33%的资源消耗,但准确度与进行全局网格加密一致。
PERAIRE等采用密度二阶导数的绝对值之和与长度的平方之积作为细化参数,分别加密了3种不同流动情况的网格,结果显示,网格自适应后,计算结果的精度保持不变,网格数量出现明显下降[17]。
Warren等在文献[17]工作的基础上,在细化参数的计算中引入了特征长度,来解决新的网格节点被持续放置在不合适位置的问题[18]。结果显示,引入特征长度后,与原细化参数相比,利用新的细化参数得到的网格对于激波的位置判断更加准确,而且更加稳定,不会随着网格数量的变化而大幅度波动。
捕捉物理场的变化特征,根据变化特征进行网格切分的网格加密策略,在有限元计算等领域也有采用,取得了较好的结果[19-20]。
本研究借鉴网格自适应思想,提出适用于五孔探针测量的测点加密方法,并利用数值模拟方法,针对叶栅通道流场,总结了速度剧烈变化区域与涡系影响区域的测点加密参数,并在该叶栅通道流场中,对测点加密方法进行了检验。
1 五孔探针测量原理
五孔探针技术基本原理是以伯努利方程为基础,运用势流理论,通过测量探针头部各孔压力,对其绕流的驻点位置的滞止压力进行预测,从而获得待测流场某空间点的气流角、速度大小、总压和静压。
探针使用前需要在校准风洞中,利用不同气流角下5个孔压力处理出校准系数曲线。在测量未知流场时,根据测得的5个压力计算出系数后,在校准曲线中插值,得到流动参数。
五孔探针进行流动测量属于接触式点测量,测量点布置的疏密和合理性会对流场信息获取的空间分辨有直接影响。
2 测点加密方法
测点加密的总体思想是根据流场的初步测量结果,判读测点增加的必要性,在流场中的特定区域增加额外测点,进行二次补测,从而获得更为精确、可信的参数变化及流动特征。
测点是否加密主要是根据测点间参数的变化进行判断,具体采用相邻测点测试参数的一阶差分作为测点加密的判断参数,判断参数定义为
|ei|=|fi+1-fi|
(1)
式中:f为所选流场参数,如速度、方向角等;下标i表示第i个测点。
在得到加密的判断参数后,需要确定加密阈值|et|。由于不同的测量环境对测量的要求不同,需要根据流场特征和测试需求给出。
利用加密阈值对计算得到的判断参数进行判断,当|ei|>|et|时,则第i个测点间隔需要加密;|ei|<|et|时,则无需额外处理。
当某两个相邻测点间需要加密时,先计算能满足参数阈值的理论间距ht,i,计算公式为
(2)
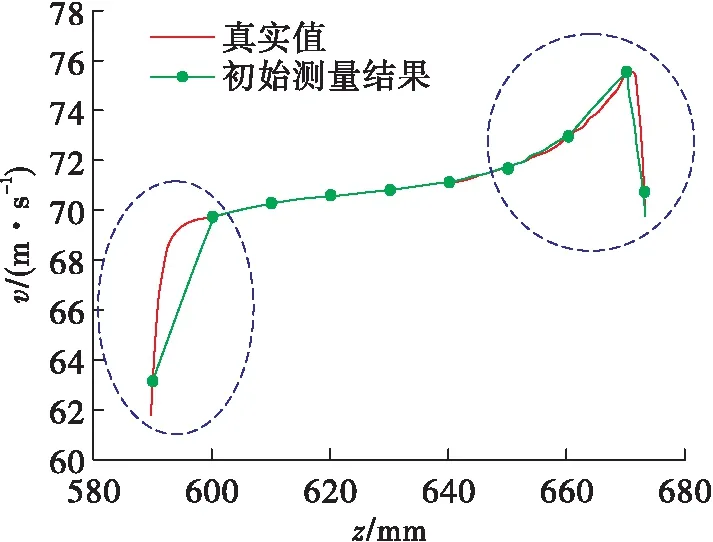
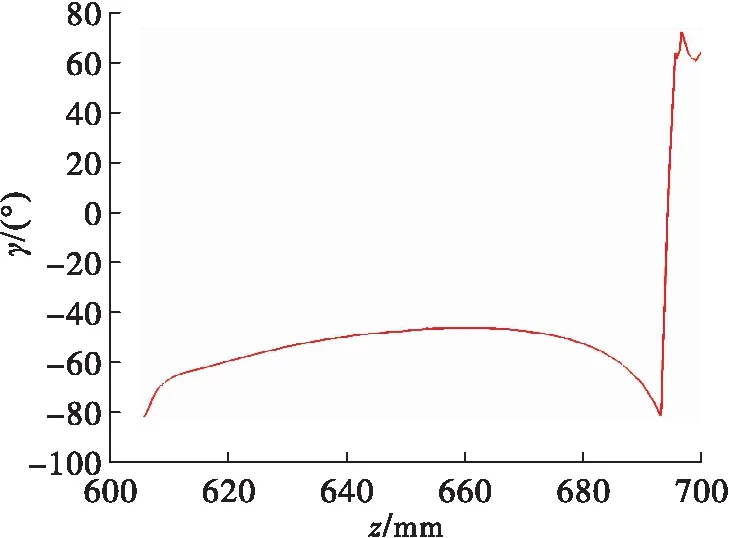
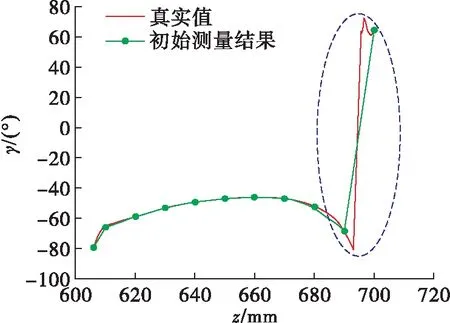
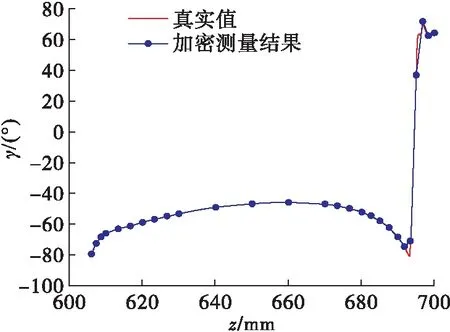
式中:ht,i为第i个测点到第i+1个测点间的理论间距;hi为第i个测点到第i+1个测点间的实际间距。将测点间距缩减至ht,i时,测点间的判断参数便会小于加密阈值,满足测量要求。但是由于测量设备等条件的限制,测点间距一般会存在最小值hmin,当ht,i 采用ht,i等分测点间隔,等分数为 (3) 式中中括号代表向上取整。将测点间隔进行n等分后,等分点即为新增测点。 具体加密过程如图1所示。首先根据初步布置的测点获得测量结果,确定最小补测间距hmin和判断阈值ei,根据相邻测点依次计算参数变化是否大于阈值,如果大于阈值,则进行测点加密,并输出加密测点坐标进行补测。 图1 测点加密计算流程示意图Fig.1 Calculation process of measurement position refinement 通过计算流程,便能对测点分布较为稀疏的流场,根据加密后的测点进行二次补测,从而对参数变化较为剧烈的区域进行捕捉,以获得更为完整的流场信息。 由于最小测试间距hmin的限制,当计算出的理论间距小于最小间距限制,即ht,i 测点加密是建立在流场的初步测量上的,在本研究中是利用数值模拟建立一个验证流场。因为叶栅内流动存在马蹄涡、角涡、通道涡等组成的涡系,不仅流动中涡结构多,而且其相互作用和演化使得叶栅进、出口的流动结构也有较大区别,一般根据流动特征只能定性描述其流动结构,这种定性描述对于进行疏密得当的测点布置是不够的。因此以叶栅内流动为对象进行测点加密方法的研究和验证。 所选择某叶栅结构如图2所示,该模型为三叶片两通道模型,入口设置为质量流量入口,入口雷诺数为220 000,出口为压力出口,设置为一个大气压,其余各面均为无滑移壁面,在叶片的壁面设置有恒定热流,以模拟实际中的叶片与气流的换热所引起的物性变化,具体边界条件在图2中标示。 图2 叶栅通道计算模型及边界条件Fig.2 Calculation model and boundary conditions of cascade 对计算模型进行了网格划分,类型为结构-非结构混合网格,叶片表面绘制了边界层,这是为更好地模拟叶栅流动,在计算时考虑了叶片表面的换热情况,使得气体因温度变化而产生的物性变化也被考虑在内,从而更加贴近真实情况,最后网格总数为1 100万。 湍流模型采用Transition SST四方程湍流模型,该模型是在SSTk-ω两方程湍流模型的基础上考虑了间隙因子和当地边界层动量厚度雷诺数2个参数,构建了2个运输方程,最终构成了Transition SST四方程转捩模型。该模型的优点一是避免了一般情况下对平均场进行积分的过程,计算周期短,计算要求较低;二是对自由来流湍流度、分离和压力梯度等影响转捩的因素敏感;三是与SSTk-ω湍流模型相容,便于与现有的CFD程序结合。在叶栅通道流场计算中,Transition SST四方程转捩模型能更好地预测叶片表面转捩的发生。文献[21]利用Transition SST四方程转捩模型进行了与本文类似的计算,得到了较好的结果,所以本文也采取该模型进行计算。 在叶栅流场中,主要的流动特征有两个,一是吸力面与压力面附近的速度存在较大区别,二是叶栅通道内存在结构复杂的通道涡系。研究选择两个截面进行这两个因素影响下的测点加密研究:一个是靠近叶栅出口处,压力面与吸力面间的速度剧烈变化区域;另一个是叶栅通道中部的涡系影响区。 叶栅中的速度剧烈变化主要是因为流体在压力面迅速加速,而在吸力面缓慢加速所形成的。截取叶栅通道的一个截面,如图3所示。 图3 叶栅截面位置Fig.3 Section position in the cascade 在图3截面上选取一部分,位置及速度分布如图4所示。 图4 叶栅通道截面速度分布云图Fig.4 Velocity distribution in the section of cascade 可以看到,在x向和z向上均存在速度的变化,相比于x向的速度变化,z向的速度变化规律不单调,更具有研究价值。速度变化区域最具代表性的参数必然是速度大小本身,同时,在叶栅通道中气流总压变化不大,速度也在一定程度上代表了静压,所以将速度大小作为速度变化区域的加密判断参数是比较合适的,即 et=vt (4) 叶栅通道中存在多种涡系,而这些涡系直接影响流动的损失和气流与壁面的换热,是流场中的重要特征,判断气流中旋涡的出现是比较困难的,在流体力学研究中一般采用涡量作为判断参数,图5展示了叶栅流场中大涡量区域处的流线,说明该区域中确实出现了旋涡。但是在采用五孔探针测量时,由于无法得到涡量这一参数,所以要从五孔探针可以获得的参数中选取参数来作为涡系影响区域的加密判断参数。 图5 叶栅通道截面涡量分布云图及流线图Fig.5 Distribution of vorticity and streamline in the section of cascade 旋涡是流体旋转所形成的,在流体旋转时,流体的速度方向必然会产生大幅度的变化,图6显示了图3中大涡量区域处的气流角γ角分布云图,γ角定义为速度方向与z轴的夹角。 图6 旋涡区域γ角分布云图Fig.6 Distribution of angel γ in vortex area 从图6中可以看到,在旋涡出现的区域,γ角迅速由-60°、-70°增长至60°、70°,出现了急剧的变化,这种变化能够反映旋涡的存在,所以加密旋涡区域,采用气流角度的变化作为判断参数是较为合适的,即 et=γt (5) 进行速度剧烈变化区域的加密验证时,在图4所示截面,从速度剧烈变化区域取x=38 mm的直线上的数据进行分析和验证,该直线上的速度分布如图7所示。可以发现,速度随坐标值的变化趋势是先急剧增大,然后缓慢增大,最后急剧减小。该速度分布存在两个速度剧烈变化的区域,其余区域速度变化较为平缓。 图7 待测区域速度分布Fig.7 Velocity distribution in the area to be measured 在图7所示的区域中,以10 mm为间隔布置测点,作为模拟测试的初始测点,得到的测量结果如图8所示。可以看到,通过初始测点得到的速度分布在速度剧烈变化区域严重偏离真实值,对于速度的变化趋势的预测也存在一定误差,而在梯度较小的区域,预测值与真实值的差距较小,这一结果说明,间距较大的测点无法适应参数变化较为剧烈的区域,对该区域的参数预测往往会产生误差。 图8 初始测点测得的速度分布Fig.8 Velocity distribution measured at initial measurement positions 在加密时,设定探针测点间最小测量距离hmin=2 mm,速度变化阈值|et|=|vt|=2 m/s,按照图1的计算流程进行新增测点坐标计算,得到的新的速度分布如图9所示。可以看到,经过测点加密后,得到的测量结果与真实值基本吻合,修正了初始测点对速度变化剧烈区域的错误预测,使该区域的预测值更加接近真实值,获得了更为完整且准确的速度变化信息。 图9 测点加密后的速度分布Fig.9 Velocity distribution measured at refined positions 图9结果说明,测点加密方法可以辨别速度变化区域并根据指定的加密阈值对测点进行加密,以适应流场参数的变化,在参数变化剧烈的区域获得更为准确的参数预测值,而对参数变化不大的区域不做处理,使得新增测点数目被控制在较小的范围内。 在图4中角度变化较大位置,在截面上取x=-20 mm处直线上的点进行分析和验证,直线位置处速度方向角γ的分布如图10所示。可以看到,γ随z值的增大,先缓慢增大,再缓慢减小,在z>690 mm时,气流角急速增大。 图10 旋涡区域取值处角度分布Fig.10 Angel distribution in the vortex area 验证该角度变化区域的测点加密时,以10 mm为间隔布置初始测点,得到的结果如图11所示。 图11 初始测点测得的角度分布Fig.11 Angel distribution measured at initial positions 从图11中可以看到,在角度变化比较平缓的区域,测得的结果与真实值吻合较好,当角度开始迅速变化时,测量得到的角度分布与真实值的误差较大。在参数变化较大的区域处,两个测点的位置直接决定了它们之间的角度分布,当测点位置不同时,角度的变化规律就会被直接改变,使得同一区域的参数分布会因测点位置的变化而变化,所以需要对该区域进行测点加密。 在加密时,设定hmin=2 mm,|et|=|γt|=5°,进行新增测点坐标计算,得到的新的角度分布如图12所示。从结果上看,加密测量取得了较好的结果,通过在角度变化剧烈区域增加测点,获得了该区域更多的参数变化信息,使得测量结果更加接近真实值,测得的角度变化趋势与真实情况相同。同时,由于整个加密区域的气流角变化均比较大,所以在设定的加密参数下,对z=600~690 mm间的测点也进行了测点加密,使得到的结果更加精确,但是采用初始测点得到的结果在z=600~690 mm间误差较小,所以可以根据测量要求调整设定的阈值,控制加密区域。 图12 测点加密后角度分布(|et|=5°)Fig.12 Angel distribution at refined measurement positions(|et|=5°) 将加密参数调整为hmin=2 mm,|et|=10°,结果如图13所示。 图13 测点加密后角度分布(|et|=10°)Fig.13 Angel distribution measured at refined positions(|et|=10°) 可以看到,阈值调整为10°,结果的精度下降不大,但测点大大减少,新增测点仅有8个,减少的测点主要集中在角度变化较小的区域,符合测点加密最初的设想,更多的测点布置在速度变化较大的区域,在速度变化不大的区域,采用较大的测点间距,测量得到的结果误差也不会太大,而在速度变化大的区域布置更多测点,可以更好地捕捉参数的变化。所以测点加密阈值的选取关系到新增测点数目,合适的阈值选择能在保证结果的情况下产生较少数目的测点。 针对五孔探针在复杂流场测量中的测点加密问题,提出了基于初步测量结果的测点加密方法,并利用数值模拟的方法对该加密方法进行了验证,得到的主要结论如下。 1)在叶栅通道中部涡系影响区中,角度剧烈变化为其主要特征,所以在测量涡系影响区时,以气流角度变化为主要的测点加密判断参数,而在靠近叶栅出口处,压力面与吸力面间的速度剧烈变化区域,速度大小的变化为其主要特征,以速度值的变化为主要的测点加密判断参数,可以得到较好的加密测量结果。 2)针对复杂流场,以参数的一阶差分为判断依据的探针测点加密方法,结合阈值的合理确定,能对流场中的速度剧烈变化区域及涡系影响区进行加密测量,从而获得更加完整的流场信息;采用不同参数,也能对不同的流动特征进行加密测量。 3)加密测量对流场结构变化的捕捉能力与最小测试间距限制有关,当理论间距大于实际测点的最小间距限制时(ht,i>hmin),设定阈值可以实现。当测点间距被限制于实际最小测试间距时,对于流场结构变化捕捉的要求被放宽。
3 加密方法的数值模拟验证
3.1 验证模型
3.2 流场特征参数的确定



3.3 测点加密方法验证


4 结论
