一种改进的等精度转台角速度测试方法的实现
2023-07-09常欢张静静于丰源
常欢,张静静,于丰源
(北京长城计量测试技术研究所,北京,100095)
0 引言
转台是惯导系统测试校准的主要设备,其技术指标和性能对惯导系统的精度起着十分重要的作用。而转台的重要指标之一就是角速度,角速度测量精度是转台控制系统精度的保证。角速度测试一直采用定角测时或定时测角方法,实质上都是采用长时间求平均值的方法进行测试,控制转台按规定的角速度运行,稳定后,用数字频率计连续多次测量转台定角信号,再求出平均值。这种方法的采样时间比较长,不能对转速进行实时的评价。并且数字频率计的体积较大,价格昂贵,且携带不便[1~2]。
目前,有基于单片机的改进型变闸门测频法,用被测信号的上升沿来控制实际的闸门时间,实际的测量时间为被测信号周期的整数倍,但由于单片机自身处理速度的局限性,无法完成高频率的测量,不能满足角速度测量的实时性要求[3]。利用CPLD 和FPGA 高速,灵活的特点,实现了较高频率范围内数字频率计,验证了利用CPLD 或FPGA 实现快速测频的可行性[4~6]。
本文设计的便携式转台角速度测试系统,采用改进等精度法实时测试转台的角速度,并将测试结果实时地传输到工控机中进行数据处理。鉴于FPGA 可以实现高速频率测量,采用高集成度、高速的现场可编程门阵列FPGA 能够满足转台角速度的实时测试要求。此外,FPGA 集成度高,可以实现片上系统。因此可以实现搭建更简单,高效的测试系统的目标。
1 总体方案设计
通过对转台角速度测试方法的研究,实现转台角速度的实时测试,从而评测转台的实时角速度。研制便携式转台角速度测试系统,代替以往用来进行角速度测试的大型数字频率计等设备,并用虚拟仪器搭建人机交互平台,实现转台角速度的实时处理,代替以往的人工录入再进行数据处理的方法,从而实现转台的角速度现场测试。
便携式转台角速度测试系统由FPGA 高速测频模块、信号调理模块、便携式工控机组成,如图1 所示。信号调理模块通过转台圆光栅将转台的实时角速度信号调理为TTL脉冲波信号。信号调理模块的输出信号连接FPGA 的脉冲计数管脚。经过FPGA 测频模块将采集的结果上传到上位机进行数据处理、显示、保存。

图1 转台角速度测试系统框图
转台角速度测试装置主要指标如下:
2 转台角速度测试方法研究
转台的角速度ω与圆光栅信号细分后频率f的关系如式(1)。
式(1)中,N为圆光栅刻线数;m为圆光栅信号细分数。
测量转台角速度,实际上就是测量圆光栅信号细分后的脉冲周期T,用式(2)换算成角速度的瞬时值。
每个脉冲的周期T,用高精度测频电路测量。
2.1 现有角速度测试方法
常用的直接测频方法主要有测频法和测周期法两种[7~8]。
测频法是在确定的时间TW内,测量被测信号的周期数NX,则被测信号的频率为:
测频法适合测高频。
测周期法在被测信号一个周期TX内,测量时基脉冲(频率为fS)个数NS,则被测信号的频率为:
测周期法适合测低频。
等精度测频是设置两个同步闸门,同时对被测信号和时基脉冲进行计数。其闸门时间是被测信号周期的整数倍,闸门起点和终点均与被测脉冲正沿同步。其测频原理如图2所示。
标准信号的频率为fS。预置闸门时间为t1,在t1 开始时,对被测信号和标准信号计数的计数器均不开始工作。在实际闸门时间t中,对被测信号计数的计数器值为Nx,对标准信号计数的计数器值为NS。则被测信号的频率为:
2.2 改进的等精度角速度测试方法
本文采用改进等精度法,同步被测信号的相邻两个上升沿作为闸门信号,即保证预置闸门信号周期比被测信号周期短。即将等精度测频方法被测信号整数倍周期明确为1 个周期,从而实现保证角速度测量的实时性。改进后等精度法测频原理波形图如图3 所示。

图3 改进后等精度法测频原理波形图
将本文提出的改进等精度法应用到在转台角速度测试过程中,由于将被测信号的上升沿作为计数器的闸门信号,因此计数器启停与闸门信号的同步对角速度的测试至关重要,涉及计数器等计数单元的速度和延迟时间的准确估计,如果处理不好,都可能影响到测试的结果。
3 软件设计
本文通过LabVIEW 软件搭建人机交互平台,LabVIEW可以快速高效地完成数据采集、分析、显示、存储等功能,利用LabVIEW 设计的程序具有较大的灵活性和开放性,给角速度的分析带来极大的方便。将转台的角速度测试结果实时传输到便携式工控机中,进行数据处理和存储。
上位机软件实现数据处理和显示。其功能框图如4、5所示。

图4 上位机软件功能框图

图5 上位机软件界面
要实时测量转台角速度,要求测频的精度高,速度快。单片机测频速度较慢,无法满足要求。FPGA 的时钟延迟可达到ns 级,采用并行工作方式,在超高速、实时测控方面有非常广阔的应用前景[9~10]。
FPGA 测频模块软件功能框图如图6 所示。基频信号通过控制预制闸门信号和实际闸门信号,对送至计数器的计数脉冲信号进行计数。被测信号在同步闸门的控制下,通过实际闸门送至计数器进行计数。两者数据同时输入计数器数据缓冲区进行数据处理。处理结果通过通讯模块送入上位机。本系统使用的FPGA 芯片的时钟输入所使用的是100MHz,能够满足系统的测试需求。
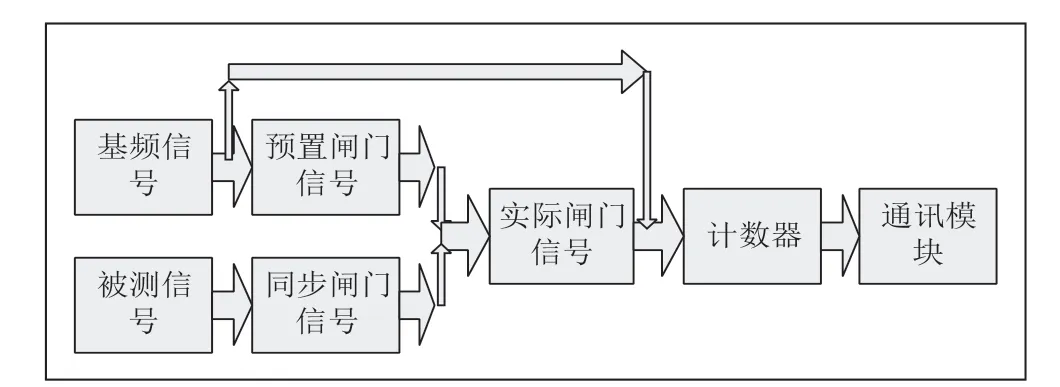
图6 FPGA 测频模块软件功能框图
4 系统测量结果不确定度分析评定
标准圆光栅为5000 线,使用IBV6072 细分和数字化电子电路对圆光栅的输出信号加2 细分,转台转速为1000°/s时,圆光栅信号细分后频率f可由式(6)计算得出。
采用信号发生器产生标准频率信号,对本文设计的FPGA 测频模块进行验证(FPGA 时钟基准为100MHz),测试结果如表1 所示。
由表1 可得,FPGA 测频模块的测频误差在0.1‰以内。
用本文设计的便携式转台角速度测试系统对转台进行角速度测试和测量不确定度分析[11~12]。
转台角速度测量不确定度的来源主要考虑:测频模块引入的测量不确定度分量u1,以及圆光栅角度测量引起的测量不确定度分量u2。被测脉冲角速度及其标准偏差是s(k)分别为:
式中T0为测频模块标准信号周期;CTi为被测脉冲周期测量值;CB为被测脉冲周期理论值。
得到角速度测量不确定度如式(9)。
圆光栅测角度测量引起的测量不确定度分量u2。
角度θ由于在转动中无法得到,故按B 类评定,假设为均匀分布,圆光栅的精度为eθ。不确定度分量u2按式(10)计算。
由于转台角速度测量不确定度分量u1、u2互不相关,则合成标准不确定度为:
扩展不确定度U(k=2):
转台转速对应的速率精度、分辨率和测量不确定度如表2 所示。
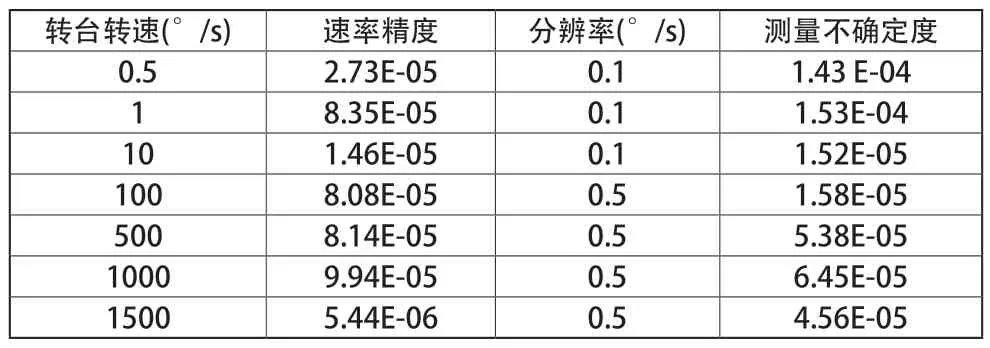
表2 转台转速对应的速率精度、分辨率和测量不确定度

表3 转台速率精度比对
使用数字频率计对本系统测量得出的转台速率精度进行比对。
由表可知本文设计的便携式转台角速度测试系统与标准设备在测量同一指标时,速率精度在同一数量级上。
5 创新点和技术进步点
(1)提出改进等精度法,采用FPGA 测频技术实现了转台角速度实时测量。
(2)采用LabVIEW 对数据进行快速高效的采集、分析、显示、存储,研制便携式转台角速度测试装置,实现了转台角速度现场、快速测试。
6 结论
本文介绍了基于改进等精度法的转台角速度测试系统,研究了转台角速度测试技术,设计了便携式转台角速度测试装置。研究了FPGA 在转台角速度测试中的应用技术,编写了转台角速度测试软件,用于采集、处理试验数据,通过试验验证,实现了转台角速度现场、快速测试。
