基于制冷控制器的在轨变频方案设计
2023-07-06李寅龙谢妮慧史翠红翟耘萱
田 园,李寅龙,谢妮慧,史翠红,翟耘萱,刘 成
(北京空间机电研究所,北京 100094)
0 引言
空间制冷控制系统一般由制冷机、测温装置、控制器等组成,通过控制器控制制冷机驱动电压的输出频率可使系统提供符合要求的温度环境。在红外光学遥感领域,配有大功率空间低温斯特林制冷机的空间制冷控制系统[1-4]的应用日趋普遍:系统可为红外探测器和其他光电器件等被控对象提供可靠冷源,降低被控对象的工作温度,减少热噪声,屏蔽和排除视场外的热干扰,从而保证被控对象的工作稳定和可靠性。同时,受到制冷机大功率驱动的影响,空间制冷控制系统的工况也变得更加复杂。目前针对空间制冷控制系统在轨期间的制冷控制已多有研究:为了应对大功率斯特林制冷机产生不平稳大超调的启动电流,李文然提出一种具有启动电流反馈功能的缓启动方式,可使启动电流均匀平稳无超调,启动电流峰值抑制约50%[5];陈国邦等提出在使用大功率斯特林制冷机的制冷控制系统中采用光耦隔离的驱动电路设计[6],但是在高轨道环境下的光辐照条件不太理想,一部分载流子使用期缩短引起光通量变小,从而导致光电耦合器件的发光源性能明显下降,也进一步影响了光电转换效率;Mungan[7]采用有符号的全周期正弦波作为调制波生成SPWM(正弦脉宽调制)驱动信号,该方法需要将完整正弦波的离散化采样点存储到片外的EEPROM 中,使用时通过设定的存储器地址读取需要的正弦值,因此FPGA 资源占用率高且对于驱动电压输出频率的设计仍采用传统方式;TAI[8]在线性斯特林制冷机基础上,通过对SPWM 波生成方法、逆变电路中MCU 时钟频率及滤波电路中截止频率、电容和电感等多个参数的分析,得到了开关数和频率精度之间的关系。截至目前,以上及相关研究都是建立在制冷机在轨期间以固定频率输出驱动电压的基础上,而该传统模式已无法满足复杂工况下的制冷需求,因此迫切需要设计一种在轨实时变换制冷控制器驱动电压输出频率的方案。
针对某型号任务空间大功率斯特林制冷系统实现在轨变频以及频率精度需满足0.1 Hz 的系统设计要求,本文提出控制器FPGA 的选取和软件设计方案,将在轨变频的目标功能分解为自动变频和指令变频两种工作模式,并实现两种模式的交互,最后对该方案进行仿真和试验验证。
1 控制器FPGA 工作原理
空间制冷控制器FPGA 的软件主要由制冷工作模式模块、驱动模块和遥控遥测模块3 部分构成,其工作原理如图1 所示。
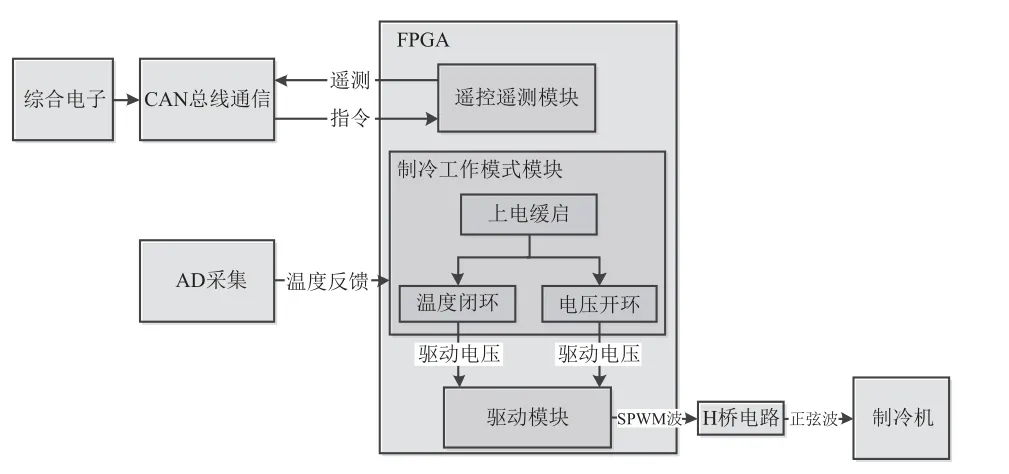
图1 空间制冷控制器FPGA 软件工作原理Fig.1 Working principle of FPGA software of space refrigeration controller
制冷工作模式模块有上电缓启、温度闭环和电压开环3 种工作模式。上电缓启即按照一定缓启方式让驱动电压从0 缓慢增大到目标值。温度闭环是以特定温度作为目标值,AD 采集的实时温度作为反馈值,做PID 闭环控制。将工作模式切换到温度闭环的方式有2 种:在上电缓启过程中,当反馈温度进入精测区时,工作模式自动切换到温度闭环;或者通过发送指令直接进入温度闭环工作模式。电压开环是通过发送指令使工作模式模块一直以某一固定电压值输出,直到工作模式被切换或电压开环的目标值被改变。以上3 种工作模式都会输出相应的驱动电压给驱动模块。
驱动模块将驱动电压转换成4 路SPWM 波输出给H 桥的4 个桥臂,通过控制这4 个桥臂的通断即可实现对制冷机电机的驱动控制。该转换过程为:基于查找表(LUT)法生成1/4 周期复用的正弦调制波,将等腰三角波作为载波与其进行比较,在2 个波形的自然交点时刻,通过控制4 路SPWM 波的高/低电平实现对H 桥4 个桥臂的通断控制。
遥控遥测模块是实现FPGA 与综合电子通信的模块。FPGA 一方面接收由综合电子通过CAN总线下发的工作模式、正弦调制波频率、遥测轮询等遥控指令,并对指令进行解析和执行;另一方面,FPGA 也会通过CAN 总线把表征制冷控制器工作状态的遥测数据发送给综合电子。
空间大功率斯特林空间制冷系统在轨运行期间,若可以通过发送遥控指令的方式对输出SPWM波的频率进行变频设置,则可以改变制冷机的驱动状态,从而满足更为复杂工况下的制冷需求。
2 FPGA 的选用
制冷控制器在轨中长时间加电运行,受空间环境高能带电粒子辐射的影响,基于SRAM 技术的FPGA 的LUT 存储单元可能会发生单粒子翻转(SEU)而导致逻辑功能紊乱。为此,国外从20 世纪70 年代末就展开了大量相关研究,其中:Srinivas 等对SRAM 型FPGA 的抗单粒子效应设计提出一种基于FPGA 布局布线的可靠性设计方法[9];Hall 等进一步研究了FPGA 的局部重配置技术[10];Vijay 等提出了宇航级反熔丝型FPGA 的加固设计措施,如设计采用多重冗余可靠性手段,将时序触发替换为组合触发等[11]。相比基于锁存器原理的SRAM 型FPGA,反熔丝型FPGA 由于其存储原理完全不同而很难发生通过简单的电离辐射改写逻辑单元的情况,从而具有较好的抗单粒子锁定和翻转的能力。此外,应用三模冗余、时间冗余,以及错误检测与纠正等电路结构设计加固方法,也可解决电子元器件发生SEU 的问题。
基于以上考虑,最终选用ACTEL 公司的反熔丝型FPGA(A54SX72A-1CQ208B)。然而其并非对SEU 免疫,其内部结构也存在SEU 敏感部位。为此,在FPGA 软件中设定了对工作模式数据及温度目标值进行三模冗余处理,以进一步提高制冷系统的可靠性。
3 指令变频和自动变频的FPGA 实现
根据实际任务需要,基于FPGA 的工作原理,设计采用发送遥控指令的方式实现空间制冷控制器在轨变换SPWM 波频率的功能,并将其分解为自动变频和指令变频2 种工作模式。设计思路为:基于冲量等效原理,在正弦调制波和三角载波的自然交点时刻,通过比较2 种波的数值大小,控制H 桥4 个桥臂的通断,生成SPWM 波;然后应用迭代除法分别实现频率精度1 Hz 和0.1 Hz 的指令变频,通过状态机2 种状态交替转移的方式实现自动变频。
指令变频模式和自动变频模式都是以发送遥控指令给FPGA 的方式实现,二者的区别在于通过指令发送的关键信息不同:指令变频模式下,发送的是模式标记和指令码值;自动变频模式下,发送的是模式标记,自动变频区间上、下限,以及步长。这些关键信息都作为输入信号给到变频模块,表征当前频率的遥测数据作为输出信号被最终显示在单检台上。变频模块的输入输出接口如表1 所示,其中,所有接口的类型都是Std-logic。

表1 变频模块输入输出信号接口Table 1 Input and output signal interfaces of frequency conversion modules
本文中FPGA 软件所采用的时钟周期为20 MHz(50 ns),正弦调制波采用查找表法和1/4 正弦周期复用的方式生成[12-14],且每1/4 周期的点数为25 个,基于以上参数设置SPWM 波的频率为
式中:A为频率常数,它与频率是一一对应的关系(如表2 所示);25×4 为一个完整正弦周期的点数。

表2 频率和频率常数对应关系Table 2 Correspondence between frequency and frequency constant
3.1 指令变频的FPGA 实现
指令变频模式下,通过遥控指令发送模式标记和频率数值给FPGA,以便其按照该频率输出SPWM 波。
当正弦调制波的频率精度为1 Hz 时,设C为频率基数,M为指令码值,则A和C之间的关系为
通过设置适当的C值,可使M与频率数值相等,例如:要将SPWM 波输出频率设置为80 Hz,则需在上位机发送码值为80 的指令字。这样的设计所见即所得,可以极大简化实际操作。基于该设计思路,将式(2)的M替换为当前频率Fre,即A=C/Fre,代入式(1),可得 SPWM 波当前频率Fre 和对应的频率基数C之间的关系
可计算得出C=200000。该数值的大小与FPGA 时钟周期和正弦调制波1/4 周期的点数相关。
当正弦调制波的频率精度为0.1 Hz 时,将式(2)代入式(1)得
根据式(1),当Fre 为75 Hz 时,频率常数A为2666。当选取频率基数C为26660 时,根据式(4)可得M和Fre 的对应关系如表3 所示,可知:频率的精度约为7.51 Hz,远大于要求的频率精度0.1 Hz。因此,当C=26660 时,不能满足精度要求,需继续增加频率基数位数。

表3 频率基数为26 660 时,指令码值和频率对应关系Table 3 Correspondence between instruction code values and frequencies when the frequency base is 26 660
选取频率基数C为266600,此时M与Fre 的对应关系如表4 所示,可知:频率的精度约为0.79 Hz,仍大于要求的频率精度0.1 Hz。因此,当C=266600时,不能满足精度要求,仍需要继续增加频率基数位数。

表4 频率基数为266 600 时,指令码值和频率对应关系Table 4 Correspondence between instruction code values and frequencies when the frequency base is 266 600
选取频率基数C为2666000,此时M与Fre的对应关系如表5 所示,可知:频率的精度在0.07~0.09 Hz 之间,小于要求的频率精度0.1 Hz,可以满足精度要求。

表5 频率基数为2 666 000 时,指令码值和频率对应关系Table 5 Correspondence between instruction code values and frequencies when the frequency base is 2 666 000
正弦调制波是由1/4 周期曲线复用得到的,本文中正弦调制波的1/4 周期点数为25,其分布如图2 所示,其中,两点之间的时间间隔为C/M个时钟周期。由表5 可知,当C=2 666 000、M=1000 时,正弦调制波的频率为75 Hz,可以满足精度要求。
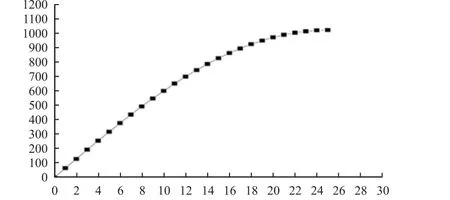
图2 正弦调制波1/4 周期点数分布Fig.2 Quarter-period point distribution of sinusoidal modulation wave
在指令变频模式的FPGA 软件程序的设计上所采用的方法是:用频率基数C(2 666 000)循环减指令码值M(1000),直到当C<M时,将C的值赋为0;当C的值为0 时,又被重新赋值为2 666 000,C的值从2666000 到0 的时间正好为2666 个时钟周期,这样就实现了两个点之间的时间间隔即时;将两点之间的时间间隔扩充为25 个点即1/4 周期正弦调制波的时间是50×10-9×2666×25 ns,进一步扩充为一个完整正弦调制波周期的时间为50×10-9×2666×25×4 ns,从而得到了该正弦调制波的频率为75 Hz。
3.2 自动变频的FPGA 实现
自动变频模式下,通过遥控指令发送模式标记,自动变频区间上、下限,以及步长等关键信息给FPGA,使其输出SPWM 波的频率在一定区间范围内往复变化,且每档频率持续时间可设。
频率常数A在变频区间范围内往复变化,步长和每档频率持续时间均可设置。例如:设自动变频区间的上限为85 Hz,下限为75 Hz,精度为0.1 Hz,每档频率持续时间为15 min,根据式(1),则对应到A的变频区间为[2354, 2666]。自动变频模式下,部分频率常数A和频率Fre 以及遥测码值M的对应关系如表6 所示,可知:当步长为±3 时,可满足频率精度为0.1 Hz 的系统设计要求。

表6 自动变频模式下频率常数与频率、遥测码值的对应关系Table 6 Correspondence between frequency constants and frequency and telemetry code values in automatic frequency conversion mode
自动变频模式在FPGA 软件程序的设计上采用的方法是:通过状态机的两个状态phase0 和phase1 的交替转移,完成频率常数A在变频区间[2354, 2666]上的往复变化。A的上电初始值是2354,状态机的初始态是phase0,在phase0 状态下,A以每15 min 增加3 的速度从2354 增至2666;状态机在收到“频率常数A≥2666”输入事件时,达到状态转移条件,系统转移到phase1 状态,并执行频率常数A=2663 的动作;在phase1 状态下,A以每15 min 减小3 的速度从2663 减至2354;状态机在收到“频率常数A≤2354”输入事件时,达到状态转移条件,系统转移到phase0 状态,并执行频率常数A=2357 的动作。自动模式下状态机的工作原理如图3 所示。

图3 自动变频模式下状态机工作原理Fig.3 Working principle of state machine in automatic frequency conversion mode
将上述程序设计用VHDL 编码实现,使用ModelSim 软件仿真得到频率常数A在变频区间[2354, 2666]的往复变化(如图4 所示)。通过A的循环变化,实现了SPWM 波的频率在上限85 Hz 和下限75 Hz 之间的往复变化。

图4 频率常数A 在变频区间[2354, 2666]上往复变化仿真结果Fig.4 Simulation results of frequency constant A reciprocating in the frequency conversion interval of[2354, 2666]
3.3 两种模式之间交互的FPGA 实现
制冷控制器上电之后默认为自动变频工作模式,可通过发送遥控指令设置为指令变频工作模式。交互部分的设计[15-18]遵循以下原则:从指令模式切换到自动模式时,为了消除因为频率突变而引发制冷机的撞缸风险,需要将指令模式下的频率常数赋值给自动模式下的频率常数,并将指令模式下的频率常数置0;此时,频率常数如果大于自动变频区间的上限则会执行依次-3(步长可调),直至小于或者等于自动变频区间的下限,之后在自动变频区间的上下限间往复变化;频率常数如果小于自动变频区间的下限则会执行依次+3(步长可调),直至大于或者等于自动变频区间的上限,之后在自动变频区间的上下限间往复变化。两种模式之间交互部分的流程设计如图5 所示。
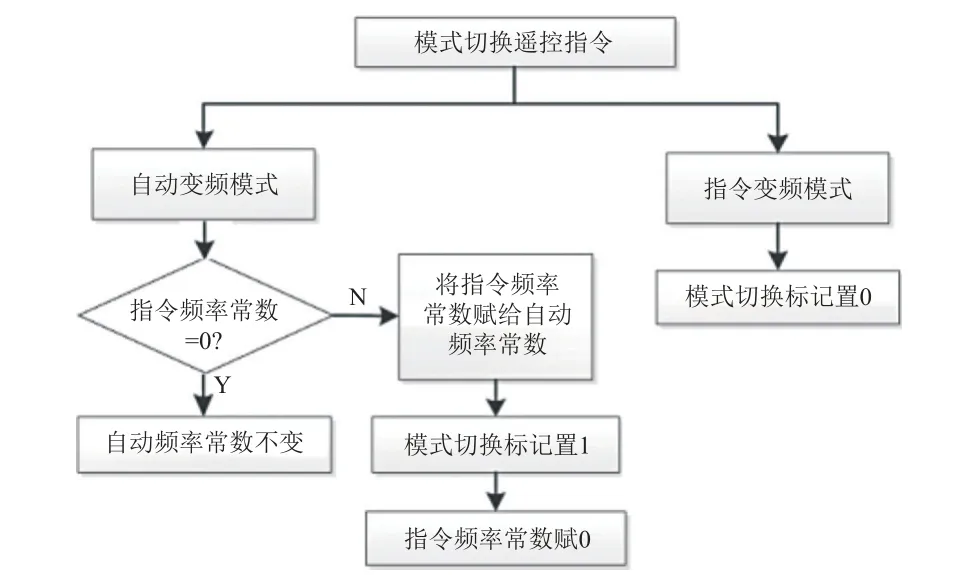
图5 两种模式间的交互设计示意Fig.5 Schematic diagram of the interaction design between two modes
在自动变频模式下,将指令变频的频率基数等关键信号赋上初始值,以确保自动变频模式切换到指令变频模式时各寄存器的状态保持正常。在指令变频模式下,不必将自动变频的频率常数恢复初始值,当切换到自动变频模式时,直接输出当前频率常数对应SPWM 波的频率即可。
4 仿真结果与试验验证
4.1 仿真结果
通过FPGA 仿真软件ModelSim,将激励文件的时钟周期设置为20 MHz,正弦调制波采用查找表法和1/4 正弦周期复用的方式生成,且每1/4 周期的点数设置为25;在激励文件中以发送遥控指令的方式设置模式标记,自动变频区间上、下限,以及步长等关键信息给FPGA,将自动变频模式的变频区间下限设置为50 Hz,上限设置为80 Hz。自动变频区间下限的仿真结果如图6 所示,上限的仿真结果如图7 所示。可见,FPGA 软件通过接收遥控指令,实现了50 Hz 到80 Hz 自动变频SPWM 波的输出。
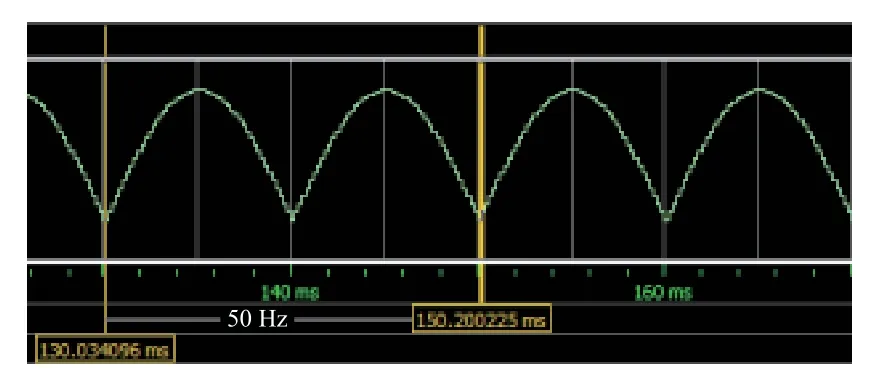
图6 自动变频区间下限50 Hz 的SPWM 波仿真结果Fig.6 Simulation results of 50 Hz SPWM wave as lower limit of automatic frequency conversion interval

图7 自动变频区间上限80 Hz 的SPWM 波仿真结果Fig.7 Simulation results of 80 Hz SPWM wave as upper limit of automatic frequency conversion interval
同时,通过在激励文件中发送遥控指令的方式设置模式标记和频率数值给FPGA,使得FPGA 输出频率为85 Hz 的SPWM 波,其仿真结果如图8所示,可见:FPGA 软件通过接收遥控指令,实现了在指令变频模式下输出相应频率SPWM 波的功能。
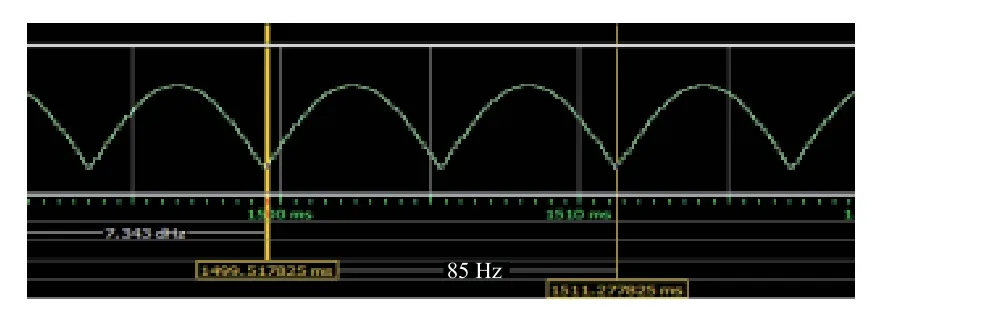
图8 指令变频输出85 Hz 的SPWM 波仿真结果Fig.8 Simulation results of 85 Hz SPWM wave with command frequency conversion output
4.2 试验验证
在空间低温制冷系统联试的验证平台,由卫星为制冷控制器提供一次供电,由管理控制器通过二级CAN 总线向制冷控制器发送遥控指令,设置工作模式为自动变频模式,变频区间下限设置为50 Hz,上限设置为80 Hz。经测试,80 Hz 的SPWM 波形如图9 所示,可见其与图7 中的仿真结果一致。
ΔX=12.514 ms 1/ΔX=79.91 Hz
通过遥控指令设置工作模式为指令变频模式,频率设置为50 Hz,经测试,输出的SPWM 波形如图10 所示,可见其与图6 的仿真结果一致。
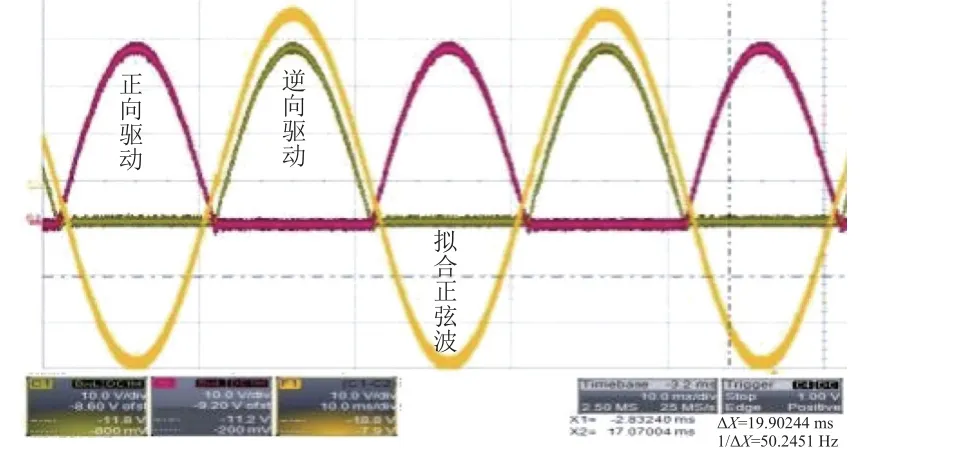
图10 指令变频50 Hz 的SPWM 波测试结果Fig.10 Test results of 50 Hz SPWM wave with command frequency conversion
图10 中生成的SPWM 波为无符号正弦波,其正半周期为正向驱动电机,负半周期为反向驱动电机,与仿真图形的结果相符。无符号SPWM 波经硬件进行拟合后为最终生成的SPWM 波,频率为50 Hz。
试验验证了自动变频模式和指令变频模式之间的交互切换功能。基于3.3 节的交互设计,当由指令变频模式切换至自动变频模式时,输出频率从当前指令模式下的频率开始缓变至自动变频区间,之后在自动变频区间的上下限之间往复变化;当由自动变频模式切换至指令变频模式时,输出频率由当前自动变频模式下的频率值,缓变至指令变频模式下的目标值。基于模式交互时的频率缓变设计,实现了在模式切换时未发生因为频率突变而导致的制冷机撞缸现象。
5 结束语
本文针对空间制冷控制系统在轨运行期间,控制器输出SPWM 波的频率固定不变,无法满足大功率制冷机复杂工况下制冷需求的问题,提出在轨变频设计方案,即通过发送遥控指令对制冷控制器进行设置,使其输出的SPWM 波实现在轨变频。首先根据实际需要,采用反熔丝型FPGA 并进行了三模冗余处理;继而设计了自动变频和指令变频两种工作模式并实现了两种模式的交互;最后通过仿真和系统联试试验验证了该方案的正确性和可行性。本文中的设计方案已应用于多个在轨红外光学相机的制冷控制器中,该变频策略得到了在轨验证。
