基于误差修正方法的改进SINS/ADS
2023-07-05付莹贞
段 宇,杨 震,付莹贞
1. 国防科技大学空天科学学院,长沙 410073 2. 空天任务智能规划与仿真湖南省重点实验室,长沙 410073 3. 南昌航空大学通航学院,南昌 523808
0 引言
SINS是通过固连于载体上的陀螺仪和加速度计等惯性敏感元件来测量并计算载体的当前姿态、航行速度与位置的自主式导航系统,是精确制导武器发射后实现空中制导的关键系统[1]。由于传感器精度等问题,导航误差随着SINS更新算法传播并不断积累,导致SINS长期导航能力弱,影响导弹等飞行器的精准打击能力[2]。解决SINS发散性问题的方法主要分为两类,一是提高内部传感器精度,二是通过外界信息消除误差累积[3]。
传感器的升级离不开陀螺监控技术的发展,陀螺监控技术可以改善陀螺的长期稳定性与漂移问题,从而校准解导航参数,提高导航精度[4],但是在实际生产中,研发高精度SINS所需成本较高,低成本、低功耗的SINS更容易实现大批生产与装备[5],所以目前已经成熟的陀螺系统将在今后相当长的一段时期内保持优势[6-7]。因此,利用外界信息修正SINS累积误差具有重要意义。在通过外界信息修正SINS的技术中,最成熟的是SINS/GNSS组合导航技术[8],全球卫星导航系统(GNSS)通过无线电等技术获得外界信息并辅助SINS,消除SINS的累积误差,该技术定位精度高、适用性好,广泛应用于军事与民用产业[9],但无线电技术的隐蔽性弱,易受同频率下其他信号的干扰和欺骗,动态性能差,大频率射频源也会对接收到的信号产生影响[10]。为了保证SINS抗干扰性的同时,提高其定位精度,相关学者开始利用大气数据系统(ADS)改进SINS导航精度[11-17]。
ADS利用外界大气压获取飞行器的速度、高度等信息,由于早期ADS测量误差大,难以得到有效应用,随着传感器技术的提高,ADS的测量精度得到改善,其不受外界无线电、高度、地形等信息干扰的优点逐步凸显,开始用于辅助导航系统。文献[11]将GPS的数据与气压表信息融合,论证了ADS的气压高度表修正GPS高度通道参数的可行性,提高GPS垂直方向上的定位精度,文献[12]利用ADS量测的真空速与GPS的地速信息得到量测速度信息,并与SINS计算的速度信息的差值即速度误差作为系统的量测量,改善了导航系统的速度与高度,但ADS与SINS的联系不够紧密,而GPS信号易受干扰,对GPS施加一定干扰后会增大导航误差,寻求SINS/ADS的组合方式更为稳妥。文献[13]论证了气压高度表的高度信息辅助光纤捷联惯导的可行性,表明SINS/ADS抗干扰性强,对军用类飞机具有一定的实用价值,在国内外文献中,文献[14]将ADS的低带宽测量和SINS的高带宽信息融合,得到高带宽、低噪声的攻角/侧滑角,文献[15-17]利用载体周围的大气数据信息,建立一阶马尔可夫过程,改善了速度误差或高度误差,但速度量测量是在平稳气流、低频风的条件下得到,其适用性有限,不能有效降低失准角与经、纬度的位置误差。总体而言,目前有关研究SINS/ADS算法的文献较少,而且在现有相关研究中存在算法不深入,大气数据信息利用不充分,ADS与SINS结合不紧密的问题,不能有效改善SINS的导航误差,包括失准角、速度误差与位置误差。
本文基于上述研究背景与现状,对SINS/ADS导航系统做出改进。由于加速度计偏差通常较小,可以假设:速度矢量的数值不发生变化,方向仅受俯仰角误差的影响。因此,在利用ADS修正SINS时,不修正SINS计算速度矢量的数值,仅修正速度矢量的方向,而速度矢量的方向仅受俯仰角误差的影响,这使得修正前后的水平速度矢量的方向相同,可根据几何关系,通过ADS量测速度与SINS计算速度的差值得到俯仰角误差,进一步得到对东、北向失准角修正量,东、北、天向速度误差修正量与东、北、天向位置误差修正量,从而提出并建立一种SINS/ADS误差修正方法,改善SINS的导航误差的同时减小对SINS的精度要求,降低SINS的研发成本,且ADS与SINS不对外界发射无线电信息,不受其他信号的干扰与欺骗,能够得到一种定位精度高、抗干扰性、隐蔽性好的SINS/ADS导航系统。
1 SINS误差方程
进行SINS导航解算前,采用椭球模型近似表示为地球几何形状[18-19]。SINS的导航误差主要包括传感器量测误差、飞行器的姿态、速度、位置误差[20]。导航坐标系取东-北-天(E-N-U)当地水平坐标系,得到SINS误差方程如式(1)所示[21]:
(1)

2 SINS/ADS误差修正方法
在动态导航过程中,设飞行器的某一空间位置为坐标原点,经过一段飞行时间后,飞行器到达下一空间点,此时SINS的定位会偏离实际位置,而ADS修正了SINS的高度,SINS/ADS的定位更靠近实际位置,设坐标原点到SINS/ADS、SINS计算的空间位置的位移,分别表示为SINS/ADS与SINS的计算位移,位移量对应的这段飞行时间被称为修正间隔时间,此后,在一个修正间隔时间内,以初始时刻所对应的SINS导航位置为坐标系原点。为简化计算,根据实际情况对SINS/ADS做如下假设:
1)在一个修正间隔时间内,SINS与SINS/ADS位移矢量的模相等;
2)在xnoyn平面内,o点为飞行器上一时刻的位置,SINS/ADS与SINS水平位移矢量的方向以及水平速度矢量的方向相同;
3)位置误差在短期内的发散特性小,因此,修正间隔时间一般不小于30 s;
4)在任意时刻,两种导航系统计算的速度数值相等,速度方向不同;
5)在一个修正间隔时间内,失准角与失准角修正量,速度误差与修正量,高度误差与修正量均为小矢量。
根据假设建立误差修正方法示意如图1:

图1 误差修正示意图
其中:设飞行过程中的已知量测量包括ADS量测高度hC,SINS计算的天向位移量h,高度修正量δhC,SINS计算的水平(东、北、天向)位移向量S=[SxSy]T,东、北向SINS计算的速度向量V=[VEVNVU]T,偏航角β。


(2)
(3)
式中:θ1为SINS/ADS计算的俯仰角,θ2为SINS计算的俯仰角。
俯仰角修正误差近似为:
(4)
式中:φC为失准角修正量。
根据等效旋转矢量求解方程[21]式:
(5)
式中:D=I+sinφCu×+(1-cosφC)(u×)2,u=[Sy/S-Sx/S0],SINS计算矢量绕单位矢量u旋转φC角度得到SINS/ADS计算矢量。
根据以上模型,将式(4)代入式(5)得到东北向失准角修正量:
(6)
对式(6)求导,可推导得失准角修正微分方程为:
(7)
根据图1中速度的几何关系,有:
(8)
根据假设4,有:

(9)
对式(9)进行一阶泰勒展开,有:
(10)
将式(8)代入式(10),速度误差修正量为:
(11)
结合假设5,天向速度误差修正量有:
(12)

将式(4)代入式(12),得到天向速度误差修正量与天向位移误差修正量的关系:
(13)
对式(13)进行微分,有天向速度误差修正微分方程式:
(14)
对式(11)微分,结合式(8)和(14),推导得速度误差修正微分方程,如式(15)所示:

(15)
根据图1水平位移的几何关系,有:
(16)

根据假设1、2和5可知,Zn轴单位向量、SINS与SINS/ADS计算的位移矢量均在同一平面内,δSC与δhC的几何关系为:
(17)
设f(δSC,δhC)=2S×δSC+(δSC)2+2h×δhC+(δhC)2,对f(δSC,δhC)进行一阶泰勒展开,得到:
(18)
结合式(17)和(18)可知东向位移误差修正量与北向位移误差修正量:
(19)

(20)
式中:RNh表示卯酉圈主曲率半径与飞行器距地球垂直高度之和,RMh表示子午圈主曲率半径与飞行器距地球垂直高度之和。
综上,根据方程式(7)、(15)和(20),可推导出误差修正方程为:
(21)
式中:姿态修正微分方程的相关矩阵为:
速度误差修正微分方程的相关矩阵为
位置误差修正微分方程的相关矩阵为
设修正量为:
SINS的导航误差为:
X=[φEφNφUδvEδvNδvUδLδλδh]T
SINS/ADS的导航误差表达式为:
XS/A=X+XC
(22)
式中:XS/A为SINS/ADS的导航误差。
通过ADS与SINS计算的高度值之差得到高度修正量与速度修正量,根据合理的假设建立SINS/ADS误差修正方程,在保证误差修正方程不过度修正SINS的情况下,每过一个修正间隔时间,便利用SINS/ADS误差修正方程对SINS的导航误差进行修正,得到SINS/ADS的导航误差。
3 动态导航仿真分析
为验证本文提出的基于误差修正方法的SINS/ADS的导航精度高,对SINS,基于文献[15-17]的SINS/ADS与基于误差修正方法的SINS/ADS进行仿真,对比分析3种导航系统的导航精度即失准角、速度误差与位置误差。
首先,利用轨迹发生器生成飞行器理想飞行轨迹,设起点纬度为北纬45°,航时1.05 h,航程729 km,飞行轨迹如图2所示。

图2 飞行器飞行轨迹
对SINS、基于文献[15-17]的SINS/ADS与基于误差修正方法的SINS/ADS进行动态导航仿真。修正间隔时间取30 s,参考德国Leica Geosystems公司leica IPAS20产品配备的IMU与DRUCK公司的民航通用型双通道航空大气数据测设系统ADTS552,设置陀螺常值漂移、随机漂移为0.01(°)/h,加速度零偏、随机漂移为100×10-6g、ADS测量误差为1 m。设东、北、天向初始速度误差为0.1 m/s,东、北、天向初始位置误差为10 m。
经计算,3种导航系统的导航误差对比如图3~5所示。其中:图3为东、北天向失准角对比,图4为东、北天向速度误差对比,图5为东、北、天向位置误差对比。
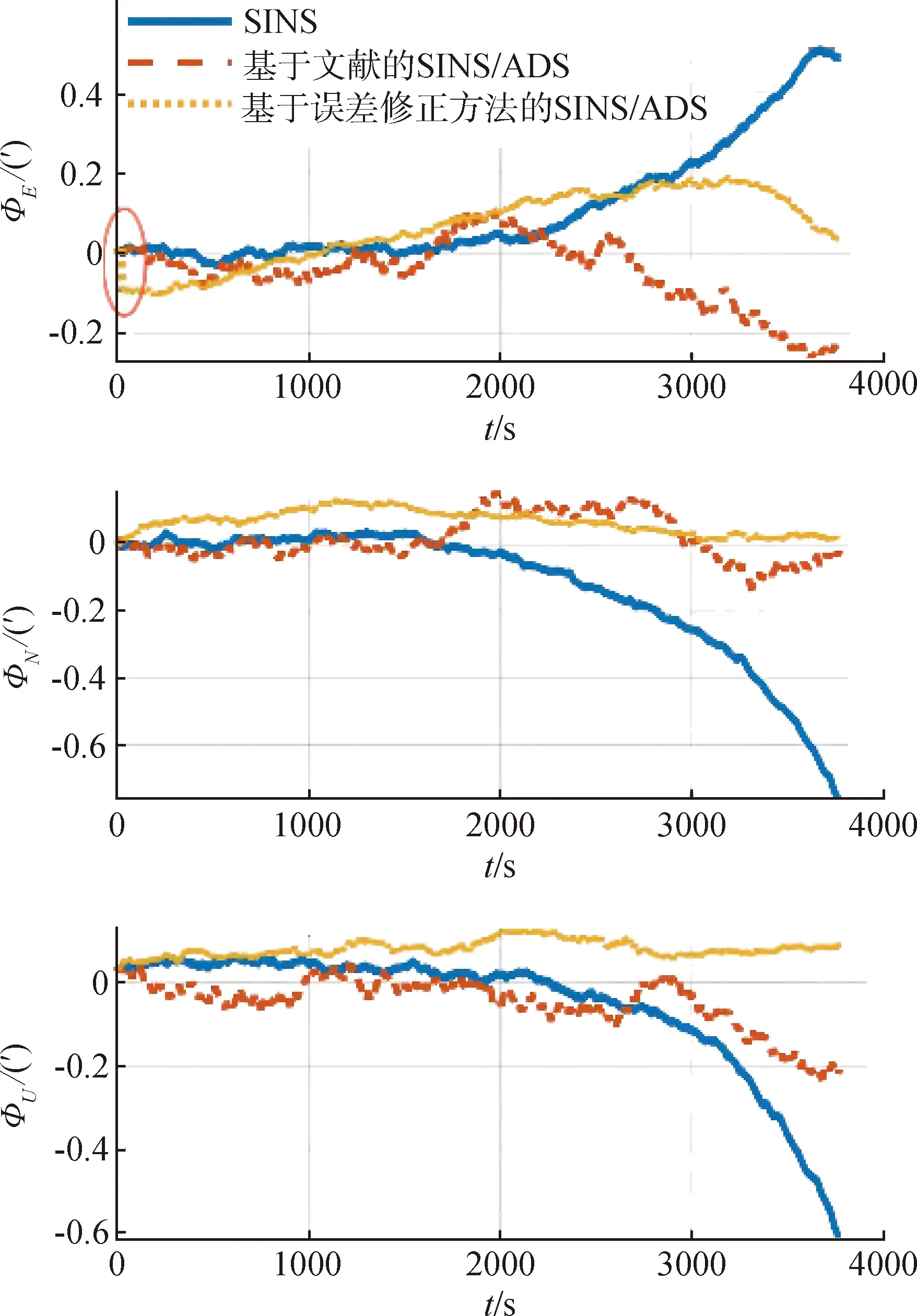
图3 失准角对比
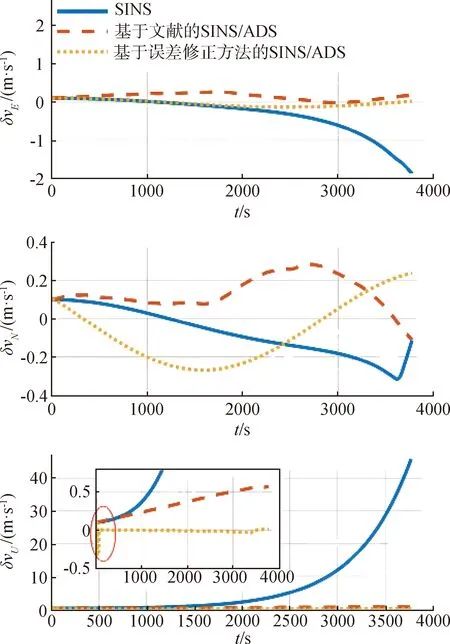
图4 速度误差对比

图5 位置误差对比
根据误差传播原理可知,尽管基于文献[15-17]的SINS/ADS对速度或高度进行了较好的修正,但失准角等其他导航参数误差并未被修正,而导航误差之间会相互传播并影响最终的修正效果,以图4和图5为例,其东、北向速度误差较小,当东、北向位置误差的发散程度仍然比本文提出的SINS/ADS大。而基于误差修正方法的SINS/ADS构建了失准角、速度误差和位置误差的修正方程即式(21),再通过式(22)对SINS导航误差包括失准角、速度误差与位置误差进行较为全面地修正,可见导航误差发散最小,导航精度最高。

另一方面,在导航仿真实验中,由于设置了零时刻的速度误差0.1 m/s、位置误差10 m,导致在初始阶段时,修正量过大,部分导航参数的误差容易发生较大的波动。如图3~5标记处所示,即基于误差修正方法的SINS/ADS在初始时刻的东向失准角、天向速度误差与高度误差,这一现象表明基于误差修正方程不能很好地解决初始时刻的速度与定位不准的问题。
在导航系统的实际应用中,更看重其定位精度。定位精度可通过东、北、天向位置误差与空间位置误差两种方式进行描述,空间位置误差是指在三维空间内,导航系统计算位置偏离实际位置的直线距离。根据上述仿真与结论已知基于误差修正方法的SINS/ADS的东、北、天向位置误差较小,现对三种导航系统在空间内的位置误差进行分析,如图6所示。

图6 空间位置误差对比
根据图5和6可知,基于误差修正方法的SINS/ADS虽然存在对天向位置误差修正不及时的问题,但是对东、北向位置误差具有很好的修正效果。因此,比文献[15-17]中SINS/ADS的空间位置误差更小,精度更高。
对仿真数据进行整理与对比,定量分析3种导航系统的导航精度,如表1所示。
结合仿真图3~6与表1可知,从总体上说,基于误差修正方法的SINS/ADS导航精度以及定位精度优于SINS与基于文献[15-17]的SINS/ADS,对失准角、速度误差和位置误差均有较好的修正效果。误差修正方程能够抑制SINS的误差发散程度,提高导航与定位精度。

表1 三种导航系统的导航误差对比情况
4 结论
利用ADS的数据,在动态导航下建立SINS/ADS误差方程,导航仿真结果显示:相较于SINS与基于现有文献的SINS/ADS,本文提出的基于误差修正方法的SINS/ADS建立了误差修正微分方程,对失准角、速度误差、位置误差都进行了较为全面的修正,同时也表明误差修正方程对SINS导航误差的修正效果好,能够有效抑制误差发散,提高SINS/ADS导航定位精度。
ADS与SINS分别通过采集大气数据信息与陀螺仪参数获得导航信息,不对外界发射无线电,不存在受外界信号干扰的问题。因此,基于误差修正方法的SINS/ADS不仅定位精度高,且抗干扰性强,隐蔽性好,可应用于导弹制导等军用领域。
但是在仿真过程中发现,误差修正微分方程不能很好地修正初始时刻的状态误差,使得初始阶段的修正误差产生阶跃或波动大,可进一步改善误差方程,提高算法精度。
