基于近景摄影测量的高精度基坑变形监测技术研究
2023-07-05隋腾飞黄建伟
隋腾飞, 黄建伟, 余 敏
(合肥工业大学 土木与水利工程学院,安徽 合肥 230009)
0 引 言
随着城市经济的发展,人口数量的增加,对地下空间的需求也越来越多。基坑是进行地下施工的重要工程,在隧道、地铁等项目施工中,基坑变形监测尤为重要。基坑变形监测是通过对基坑支护体系及周边建筑物进行监测以确定基坑稳定性的工作,是实时掌握基坑状态和指导下一步施工的重要环节[1]。
传统的基坑监测使用的诸如水准仪、全站仪[2]、全球系统卫星系统[3]、测量机器人[4]等,虽然可以提供高精度的测量数据,但是耗费的时间、成本以及人员精力相对较大。近景摄影测量能够在一些不容易达到的场所或者相对危险的场所得到广泛的应用,通过相机拍照的方式,求解共线条件方程,计算得到各点的三维坐标,具备非接触、面式测量、低成本等优势,在基坑变形监测中有着广泛的应用。
当前我国摄影测量发展虽然具有一定的规模,但是比较零散。我国最早使用摄影测量做基坑监测,文献[5]使用普通相机,无固定设站,无控制点(在坑内或坑边放置基准杆和定长杆),通过计算点的物方坐标,其监测基坑变形精度达到了±3 mm。此外由张祖勋院士研发的以计算机视觉原理(多基线)代替人眼双目视觉(单基线)传统摄影测量原理的多基线近景摄影测量,提出了将空间1个点由2条光线交会的摄影测量基本法则变化为空间1个点由多条光线交会而成的概念[6-7],多基线数字摄影测量目前能达到的最高绝对精度为±0.1 mm。
对于目前近景摄影测量基坑监测精度不高的问题,本文提出了一种基于二维图像的近景摄影测量监测方法,从相机检校、光照条件、拍摄参数设置和数据处理等方面进行分析研究。
1 近景摄影测量基坑监测技术
1.1 实验仪器选取
1.1.1 摄影机选择与标定
摄影机选择工业非量测相机,工业相机具有较低的畸变误差,稳定性较好,且性价比较高。经过比对分析,本次实验相机选择海康威视工业相机,工业相机型号为MV-CA060-10GM,分辨率为3 072×2 048,像元尺寸为2.4 μm×2.4 μm。
尽管该相机畸变误差较低,但是为了确保获得高精度监测数据,需要进行相机标定。本文采用张正友标定法,通过对10张标定板图像标定,得到标定相机内参数矩阵和畸变系数,其中相机内参数矩阵和畸变系数主要用于像片校正,减弱畸变误差在内等系统误差的影响,以便提高监测数据精度。
相机内参数矩阵m为:
畸变系数矩阵d为:
1.1.2 监测标志设计
标志设计原则为自适应识别、受旋转缩放影响小、检测与定位相对较容易、处理时间短、特征点数量多、非完全对称等[8]。其材质应选择不易变形、受环境影响小、不变色的硬质材料,如不锈钢等。基于上述考虑选择标志如图1所示,经实验比对,该标志相对稳定,具有“四点共圆,三点共线”的特点,受变形影响小,内部特征点数量多,并且处理时间短。
图1 标志点的设计
1.2 物面分辨率
相机焦距越长,视场角越小,拍摄远距离物体越清晰。在近景摄影测量中,焦距的选择与摄影距离有关。物面分辨率fx、fy分别表示像片上像素距离与实际真实距离在像片x、y方向上的比值,其计算公式为:
(1)
(2)
其中:fx、fy分别为x、y方向上的物面分辨率;(x1,y1)、(x2,y2)分别为标志上2个像点的像素坐标;Dx、Dy分别为x、y方向实际距离长度。
通过2个方向的物面分辨率,确定像片上x、y方向比例关系。如果相机或标志发生变化,物面分辨率也随之发生变化,但仍然能保持正确的比例关系,从而保证连续监测的稳定性。
对于正射投影来说,fx与fy的值相等;对于非正射投影来说,fx与fy的值会有差异。fx与fy越小,由像素计算实际距离误差越小。为了满足基坑监测精度,在距离基坑20 m位置拍摄,选择相机焦距50 mm,其物面分辨率约为0.169 492 像素/mm。
1.3 方向修正
由二维图像计算出的像片特征点的位移是基于像方坐标系的,即计算出来的是特征点在像片坐标系中的像素位移,在转换成实际基坑沉降和水平位移时则需要物面分辨率,并进行方向修正。通过旋转角法可以获得基坑在水平和垂直方向的真实位移。旋转角法通过计算像片水平方向与实际水平方向的夹角α,像片垂直方向与实际垂直方向的夹角β,实现方向的修正。具体计算公式为:
(3)
Δx=cosα(dx1-dy1tanα)
(4)
(5)
(6)
其中:α、β分别为图像上x、y轴与实际水平方向的旋转角(实际水平方向为初始标志上水平线方向,该值经过初始化后不再变化,以保证监测准确性);(x1,y1)和(x2,y2)为标志上水平线的2个端点像素坐标;(x3,y3)和(x4,y4)为标志上垂直线的2个端点像素坐标;(dx1,dy1)和(dx2,dy2)分别为水平方向和垂直方向2个点坐标差;Δx和Δy分别为实际水平和垂直方向位移值。
通过方向的修正,将图像上计算的水平和垂直位移转换成修正后的基坑水平和垂直方向的位移值。通过2台相机对标志相邻面的观测,可获得标志的3个方向上的变形值,即获得基坑三维变形值。此外,2个相机在垂直方向上获得的重复观测数据,可以用于自检校。
1.4 系统误差分析
近景摄影测量基坑监测的系统误差主要包括光照不均匀和相机抖动。首先,相机光照条件不均匀会影响像片的灰度值,不同像片之间灰度的不均匀变化会降低影像匹配的精度;其次,相机抖动会引起像方坐标系的变化,从而导致位移误差。
摄影测量往往在进行影像匹配时主要关注标志区域内的特征点位置变化,忽略了标志外的图像,没有重复利用这些信息。然而,在较短的时间获取像片,判定标志外的图像信息没有发生绝对位移,由此可以作为摄影测量相机抖动引起误差的基准。如果在拍照前后标志区域外的图像发生了变化,那么可以判定摄影系统存在较大的系统误差,匹配结果可信度降低。
选取短时间连续拍摄的同一位置的图像做分析。取像素坐标x方向进行分析,共计164个点,其直方图如图2所示。从图2可以看出,整体呈现正态分布,部分区域产生了位移,但大部分点位移相近。
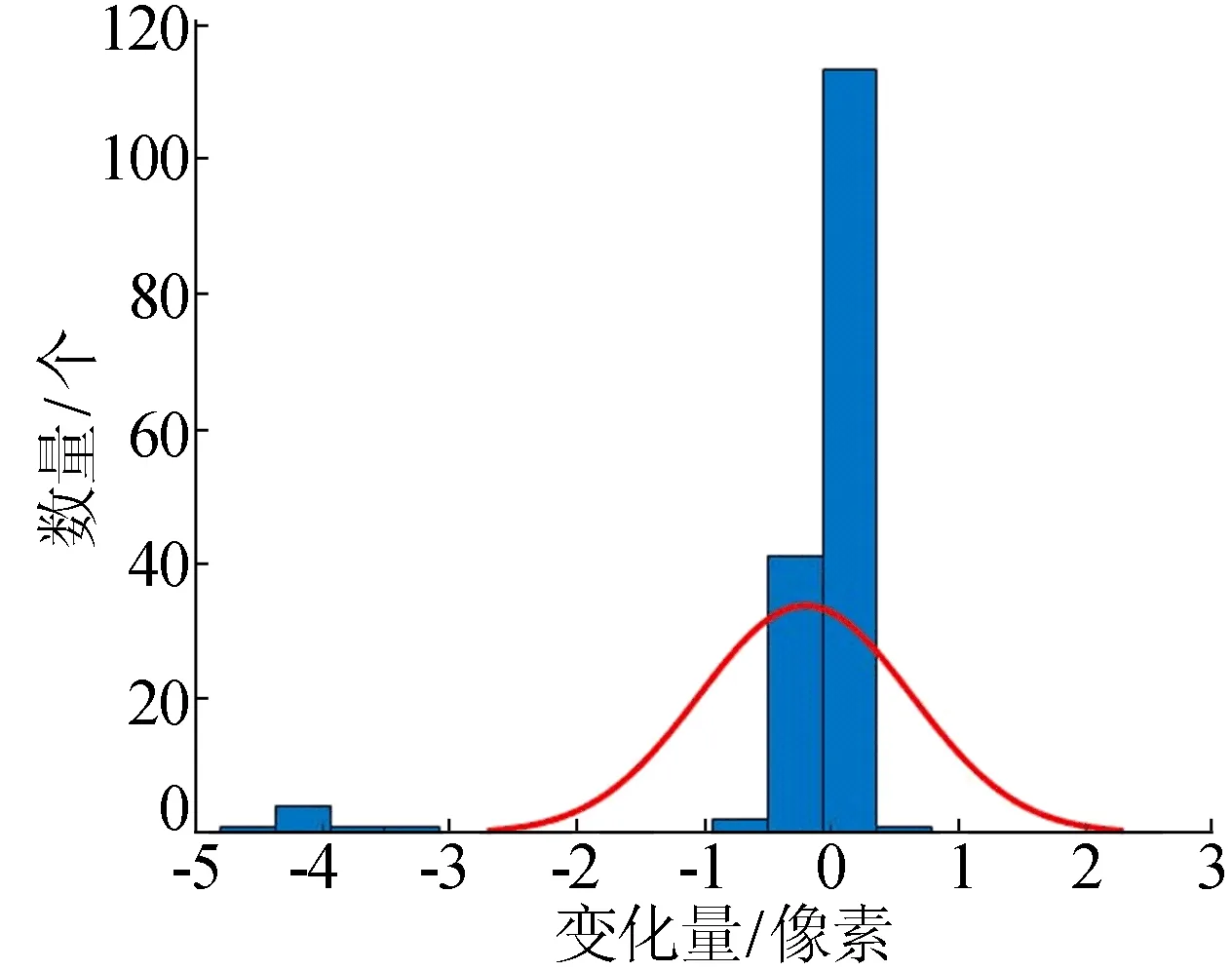
图2 标志区域外点的变化量与数量
根据测量误差理论,在等精度观测时较大误差出现的概率较小,大部分点都是在真值附近,且均值可以表示真值。为此,本文使用迭代的方法不断排除距离真值远的点,保留大部分距离真值近的点并求取均值,以此判定观测系统误差。主要步骤如下:
用这种方法计算的误差排除了由于大部分外界因素或者曝光误差带来的误差,此时得到相机拍照的系统误差。结果如图3所示,经过多次实验得出σ=0.5。

图3 迭代后标志区域外点的变化量与数量
通过多次实验得出,若相机有较大的变化,则标志区域外的图像计算结果较大。一般该值小于10像素(该结果在相机焦距50 mm、距离20 m测定)则认为相机误差对实验整体结果影响很小,摄影测量的可信度高。
1.5 技术路线
综上所述,本文采用下述技术流程完成相关近景摄影测量变形监测数据采集与分析处理,如图4所示。

图4 高精度基坑监测流程图
2 实验结果分析
2.1 实验分析
为了检验方法精度,采用活动觇标模拟位移值进行了15次实验,分别计算其单次误差和累计误差。
活动觇标主要用于视准线法水平位移变形观测,其模拟变形监测精度高[9]。本文使用的活动觇标位移分辨率为0.01 mm,该活动觇标在使用时首先需要整平,以保证实验变形为水平形变。
本次实验从单次误差和累计误差的方面讨论了方法的精度。首先将活动觇标固定整平,使其刻度值为100 mm,拍照,命名为A;然后活动觇标每次向右侧位移1 mm,即旋钮旋转1周,共7次,依次命名为A1~A7,此时活动觇标刻度为107 mm;然后活动觇标向左位移,共7次,依次命名为AT1~AT7,结束后活动觇标又回到100 mm的刻度,完成本次实验,活动觇标右移见表1所列,左移数据见表2所列,闭合差像素位移为-0.32像素,实际位移为-0.083 mm,理论闭合差值为0 mm。

表1 活动觇标右移的像素位移和实际位移

表2 活动觇标左移的像素位移和实际位移
实验相机焦距50 mm,相机距离活动觇标距离20 m,物面分辨率fx=fy=0.169 492 像素/mm,旋转角α=β=0,位移真值误差为0.01 mm。
由上述实验得出,实际位移单次误差小于0.1 mm,比目前传统测量方法以及立体摄影测量方法解算三维坐标的精度高。选择最后一次实验获得的图像与初始图像比对,其误差也小于0.1 mm。因此无论单次误差还是累计误差均小于0.1 mm。
2.2 光照条件测试
摄影测量中,光照条件影响照片的质量,优质的光源可以突出待测点的对比度,提高系统测量精度,有利于后续处理[10]。
在基坑监测中,光源为日光,不同光照像片的灰度值不同,图像过亮或过暗会丢失细节信息,导致精度过低。在不同光照条件下拍摄1组图片,计算其平均灰度和检测精度,图片如图5所示,结果见表3所列。

表3 不同光照条件下的平均灰度与检测精度

图5 不同光照条件下的图片
表3中,平均灰度指整张图片的灰度均值,检测精度为标志区域内检测出的特征点的数量。
从表3可以看出:过亮的图片细节损失非常大,检测精度很低;在比较暗时,对比度较低,但仍能看清轮廓,细节损失较低,检测精度一般。经过多次实验获得,本实验场地最佳光照在55~85像素之间;最佳拍照时间为6—9点和16—18点。
3 结 论
本文基于近景摄影测量在基坑变形监测中存在监测精度不高的问题,提出了基于二维图像计算基坑变形的方法,通过引入物面分辨率与方向旋转角修正,提高了方法精度。通过2台相机对标志相邻面的观测,获得基坑三维变形,并且通过垂直方向的重复,完成自检校工作。
实验结果表明,该方法获得的单次变形误差小于0.1 mm,当相机与目标距离小于20 m时,其精度还可以进一步提高。该二维图像处理方法在一定程度上提高了摄影测量变形监测精度,在基坑变形监测工作中可推广使用。
