综合物探技术在海底管线探测的实践
2023-07-02于洋王俊刚李建委王家文梁咏杰徐建龙
于洋 王俊刚 李建委 王家文 梁咏杰 徐建龙
1.国能黄骅港务有限责任公司;2.中交水运规划设计院有限公司
1.物探设备介绍
多波束测深系统:多波束测深系统与惯导相结合,可以获取高精度、高密度的水下三维点云,可以直观的获取水下坡度、水底底质、水下地貌等信息[1]。包括换能器阵列、定位系统、收发机和处理单元、罗经和声速剖面仪及后处理系统。
磁力仪:磁力仪主要为3种,分别为质子旋进式、机械式、光泵式,仪器指标主要包括灵敏度、精度、分辨率、量程等[2]。
浅地层剖面仪:由处理单元和换能器组成,通过换能器向水下垂直发射声波信号,再由换能器接收回波信号,经信号处理可获取海底浅部地层结构。一般浅地层剖面测量频率大于3000Hz,垂向分辨率可达厘米级,穿透深度几十米[3]。
2.工程实例
本工程水域位于珠江口,水底标高为-7m,航道设计疏浚深度为-9.4m。区域底质为淤泥、淤泥混砂。海底管线为石油输气管线,管线为东西走向,管径为900mm的金属管,管线下部为50cm砂垫层,管线周边为30-50mm的碎石垫层,管线上部为330-380mm的石块作为覆盖保护层,保护层的厚度为3m,保护层的上部为自然回填。按照工程要求,需要探测出管线保护层顶标高。外业实施按照对测区进行多波束扫测,管线区域进行1:200比例尺扫测,利用磁力仪沿垂直管线进行走航探测,确定管线的平面位置,然后利用拖曳式浅地层剖面仪进行泥面与管线抛石顶标高划分,结合多波束的泥面高程进行改正,最后计算出管线的保护层顶标高。
2.1 多波束获取管线区域三维地形
采用德国ATLAS FANSWEEP20多波束测深系统,该系统由FANSWEEP 20主机操作站和发射换能器阵、接收换能器阵、RTK、TSS公司的M A R SH姿态传感器、GPS定位仪、海鹰公司的声速剖面仪、电脑以及ATLAS控制软件处理单元、Hypack海洋测绘导航软件组成。

图1 CARIS多波束数据处理流程图
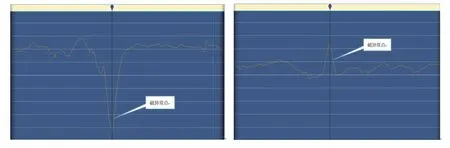
图2 管道引起的磁异常点特征图
(1)水位观测。工程区水域宽阔,无遮挡,水位站控制范围为上下游2km。测深前将测深仪与水位观测时间进行同步。水深测量前10min开始,水深测量后10min结束,水位观测时间间隔为10min。水位观测记录采用人工及HY-01型自计水位仪自动记录方式进行。
(2)多波束测深系统安装和校准。本工程多波束测深系统固定安装在专用测量船上,在干船坞内进行安装及系统参数测量,测量时采用徕卡TCRA1201全站仪进行高精度测量,测量的相对位置关系数据记录存档,水深测量时输入测深系统进行系统固定改正。
使用多波束水深测量前进行系统稳定性试验及航行试验。稳定性试验选择在测区水深20m处平坦区域,对水深进行重复测量,并利用单波束测深仪进行水深比对;在进行多波束校准之前,需要针对各个校准项设计相应的测线,然后将测线数据导入校准软件,在软件中对数据进行分析,计算出校准参数,最终完成校准工作。本次测量中多波束测深系统采用了PPS秒脉冲时间同步,统时延值(latency)为0ms,无需测量。根据规范要求,在测区布设相应的测线,计算纵摇偏差(Pitch)、横摇偏差(Roll)、艏向偏差(Gyro)校准参数。
(3)多波束数据处理。后处理顺序为:定位点数据检查-姿态数据检查-声速改正-线模式编辑-潮位改正-合并数据-面模式编辑数据处理等。处理后数据利用CARIS GIS对管线区域按照1:200比例尺水深压缩。
2.2 磁力仪获取管线平面位置
采用加拿大Sea SPY标准质子旋进式磁力仪,量程为18000 nT-120000nT,作业区域地磁场矢量与传感器长、短轴夹角均大于6度,自动进行南、北球转换;分辨率为0.001nT,灵敏度为0.015nT;采样频率为0.1-4 H z;绝对精度为0.2nT。
1)测线布设:管道探测区域测线垂直于管道方向布设,测线间距50m,单条测线长200m。
2)仪器安装及平面定位:GPS定位天线与换能器中心不在同一竖直面,通过偏移校正归算,使GPS定位点与声呐数据统一。设备主机和导航系统安装在驾驶室内。平面定位采用SPS351接收机获取实时差分数据。
3)测量过程:将磁力仪在船只甲板连接调试正常后,下水后,观察设备信号,将拖鱼压力传感器值归零,投放拖鱼至最佳位置,注意电压值、信号强度、磁场值、深度等信息。各信号正常后,测量船只沿设计的测线进行测量,采用连续走航式探测采集数据,船速控制在5节左右,拖鱼尽量贴近海底,采样频率设定为1Hz。测量时调节磁力显示尺度,保证能分辨出磁性物体的磁力异常。
4)探测成果:此次磁力探测因管道引起的磁力异常点较明显,可以明确探测出管道的位置,每条测线异常点(既管道位置)根据磁力异常点连线即为海底管线的平面位置。
2.3 浅地层剖面仪获取管线覆盖层厚度
采用英国GeoPulse Pipeliner,声能水平可达200db,发射频率为2KHz-14KHz调频脉冲波,可穿透海底地层深度达50m(淤泥),如遇粘土、残积土、砾砂等高声阻地层则其穿透深度将降低,分辨率为0.1m-0.5m,地层浅部分辨率较高、深部分辨率较低。采集软件为SonarWiz5专业采集处理软件,配合GeoPulse Pipeliner记录海底地层反射。
1)测线布设:管道探测区域测线垂直于管道走向布设,测线间距50m,单条测线长200m。
2)仪器安装及平面定位:发射声波震源和接收地层反射的水听器阵列被安装在测量船左侧、水面下2m处。由于浅地层换能器位于船左中部,螺旋浆噪声对地层反射信号影响较少,可提高记录图像信噪比。GPS天线在地层反射源中心一侧,在采集软件中进行坐标改正,就能准确利用GPS实时定位换能器中心的位置。平面定位采用SPS351接收机,工作方式为实时差分方式。
3)测量过程:进场前对所有仪器进行静态校准。正式探测前,进行全系统动态调试,检查各仪器工作状态,进行最佳参数比较选取与确认,选择在特定环境条件下获取最佳质量声图的参数设置。现场资料采集仪器值班人员负责记好班报,包括进入测线开始时间和完成测线时间、定标号、仪器工作状态与条件、工作仪器参数选取、过往船只和水上作业情况、测线两边地形地貌特征、特殊声图映象现场注释、工作时突发事件及影响测量工作因素等。本次浅地层剖面仪声源置于水面下2m。发射能量为全功率,频率3.5Hz,触发0.40s,扫描80ms,延迟0.08s(配合设备数据处理滞后时间)。施测时船速尽可能慢,一般控制在3-4节左右,以10m等距离定标。
4)浅地层探测声图数据解释:浅地层声波探测是通过安装在调查船甲板上的主机,控制安装在水下的声学震源(电声换能器)垂直向海底发射圆柱形声波,海底地层信息(海底反射波)通过接收水听器(声电换能器)接收,控制主机通过对地层信息信号放大、滤波等数据处理后,通过SonarWiz5软件记录出海底地层剖面声图及坐标位置,在剖面图上计算出每一个定位点的各声学界面即沉积地层之间的厚度数值。由于剖面记录的是时间分量,因此还要进行深度转换,得到海底至物理分层顶面的厚度。
管线探测区域因管道铺设时上方设立有保护层,无法直接探测到管道位置,平面位置采用磁力探测到管道位置,厚度采用浅地层探测数据,同时根据1:200的多波束海床高程数据,可以计算出每个管线点的顶标高。管沟位置在声图共有8条测线可体现出管沟与航道交叉。测线点声图见图3、图4,图中红线为海床面、蓝色线为物理分层线。
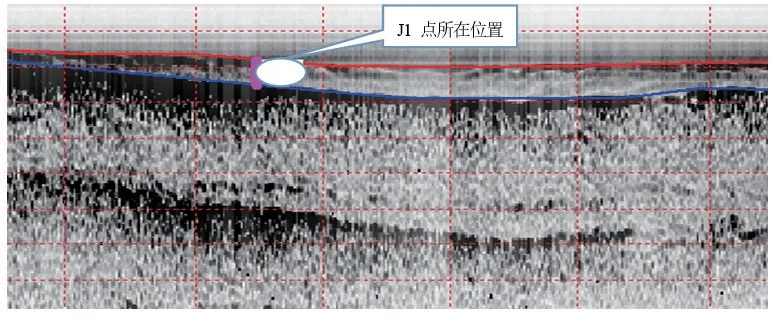
图3 管线处物理分层示意图
图4 管线处物理分层示意图
3.结语
(1)工程海域底质为淤泥、含沙量较少,覆盖层厚度约3m,利用多波束测深+磁力探测+浅地层剖面设备相结合,能够获取较准确的管线覆盖层的三维坐标。砂层较密实的场区,浅地层剖面仪穿透能力有限,可以采用单道地震结合磁力的方法进行管线探测。
(2)该案例采用拖曳式浅地层剖面仪,需要结合多波束采集海底高程改正。
(3)受潮汐、水流、涌浪、行船等影响,在数据采集过程中,需要调整最佳采集参数,确保能获得高信噪比的原始数据。