基于Simscape的呼吸机系统建模与仿真
2023-06-30许利鑫王家军
许利鑫,王家军
(杭州电子科技大学自动化学院,浙江 杭州 310018)
0 引 言
新冠疫情暴发以来,迅速演变为一场全球性公共卫生危机。部分感染者出现呼吸困难等症状,需要及时使用经鼻高流量氧疗或通气设备辅助呼吸[1]。呼吸机可以让患者在不能自主呼吸的情况下保持呼吸通畅。目前,世界各地医院最紧缺的就是呼吸机。但呼吸机的生产难度高、成本较高,无法满足市场需求。为此,麻省理工学院研发了一款基于Ambu bag的低成本呼吸机E-Vent[2]。Ambu bag是德国工程师Holger Hesse与他的合作伙伴Henning Ruben在1953年设计的一种呼吸器,至今仍广泛应用于心肺复苏、病人运送、快速反应等场景[3]。Ambu bag被挤压时迫使气体进入患者肺部,在释放后自动充气并恢复原有形状,操作便捷,可以暂时缓解呼吸机供应不足的问题。其缺点是无法精准控制气体的流量和压力,不适合患者长期使用。随着涡轮风机产品性能的提升,基于涡轮风机的呼吸机逐渐彰显其优势。Pintavirooj等[4]采用涡轮风机设计并制作了急救呼吸机,已通过肺部模拟器和标准呼吸机测试仪的校准和评估,准备进行动物实验。
呼吸机研发周期较长,仿真是缩短呼吸机研发周期的有效途径。Matlab/Simulink为系统开发提供平台和工具,多域物理建模工具Simscape具有更好的可视化效果,并能准确展示项目结果[5-6]。本文在Matlab/Simulink平台上,建立具有较高精度的呼吸机系统仿真模型,模拟呼吸机与患者肺部的相互作用,通过模拟典型通气模式对呼吸机系统模型进行验证。
1 关键部件模型
本文构建的呼吸机系统模型的关键部件主要包括涡轮风机、比例阀、肺模型等,是呼吸机系统模型的重要组成部分。
1.1 涡轮风机
采用涡轮风机的呼吸机主要依靠电力驱动,不必依赖中央供气系统,使用室内空气产生加压气流[7-8]。涡轮风机外部轮廓与风机模型如图1所示。电机带动蜗壳内的叶轮高速旋转,叶轮上的叶片推动气体,增加气体动能。在离心力的作用下,气体被甩出叶轮边缘,沿着蜗壳流向出口。

图1 涡轮风机外部轮廓与风机模型示意图
为了让风机模型更贴近呼吸机专用风机,本文使用Simscape元件库中的风机模型Fan建立呼吸机系统的风机模型,采用杭州贝丰科技有限公司的微型高性能涡轮风机C75H2的实际数据进行校准。风机C75H2在24 V电压下工作时的压力/流量特性曲线如图2所示。风机输出的最大压力约117.3 cmH2O(即11 503.2 Pa),最大流量约575 L/min。风机采用脉冲宽度调制(Pulse Width Modulation,PWM)来改变输出的压力和流量。将图2的压力/流量数据导入到风机模型Fan,使其获得与涡轮风机C75H2相似的特性。风机模型Fan是按照理想的风机定律设计的,并忽略了由摩擦引起的压力损失,因此,表现出的特性与真实的风机C75H2有一定的差异。

图2 风机C75H2压力/流量特性
1.2 比例阀
呼吸机利用比例阀来快速精准控制气体流量。在吸气阶段,通过比例阀控制患者吸入气体的流量;在呼气阶段,通过比例阀控制患者呼出气体的流量和呼气末正压,防止患者过度呼气引起肺泡塌陷[9]。iQ Valves公司设计的比例流量控制阀iQ PFCV在5.0 psi(即34 473.8 Pa)压差下的实际流量特性曲线如图3(a)所示。阀前后压差一定时,阀门气体流量与阀门开度总体上呈正相关。阀门开度可以使用PWM信号进行调节。为了降低比例阀建模的复杂度,对增加开度时的流量和减小开度时的流量取平均值,获得近似流量特性曲线如图3(b)所示。

图3 iQ PFCV比例阀的实际流量特性曲线与近似流量特性曲线
从图3(a)可以看出,在增加阀门开度和减小阀门开度时,相同占空比的PWM信号对应的阀门流量并不重合,说明阀门具有滞后性。从图3(b)可以看出,占空比为40%时,近似流量与实际流量的误差达到最大,为8.2 L/min。
本文研究的比例阀模型采用Simscape元件库中的阀门模型2-Way Directional Valve。将图3(b)近似流量特性数据导入到阀门模型2-Way Directional Valve,对其进行校准。由阀门模型的相关介绍可知,采用线性内插法可以进一步提高数据的平滑性。经过校准后的阀门模型2-Way Directional Valve特性与比例阀iQ PFCV相似。
1.3 肺模型
肺模型对呼吸过程的模拟至关重要。肺的内部结构十分复杂,但在对肺进行通气时,可以近似将肺当作一个整体。因为更复杂的模型在参数辨识方面实现起来并不容易,故肺的建模通常采用单室模型。根据单室模型建立的肺模型如图4所示。图4中,气体在通过孔板时的压力损失用于模拟气体在通过人体呼吸道的压力损失。一般来说,吸气和呼气时的气道阻力不完全相同,所以,图4设置了2条支路,分别模拟吸气时和呼气时的气道,2个止逆阀的配置使得气体只能单向流动。
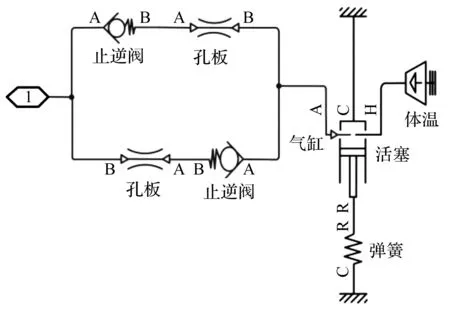
图4 肺模型结构
根据能量和质量守恒推导出流过孔板孔口的气体流量为:
(1)
式中,Q表示孔板孔口处的流量,α表示流量系数,S表示孔板孔口的横截面面积,P1表示气体通过孔板前的压力,P2表示孔板孔口处的压力,ρ表示孔板孔口处的气体密度。
气流为湍流,则孔板前后压力与孔板孔口处流量的关系如下:
P1-P2=RQ2
(2)
式中,R表示通过孔板的阻力,在肺模型中表征吸气阻力或呼气阻力。
结合式(1)和式(2),得到吸气阻力或呼气阻力的表达式为:
(3)
图4中,气缸内部有1个活塞,活塞与弹簧接触,用于模拟患者肺部。当入口压力高于气缸内压力时,气体往气缸内流动,气缸内气体体积增加,活塞向外移动,压缩与活塞相连的弹簧;当入口压力低于气缸内压力时,弹簧恢复形变,推动活塞,气缸内气体往外流动。弹簧的弹性集中体现了肺部在扩张和收缩时表现出的弹性。
肺顺应性表示在气压差作用下肺扩张的能力,其数学定义为:
(4)
式中,C表示肺顺应性,Δp表示肺(气缸)内压力变化,ΔV表示由肺(气缸)内压力变化Δp引起的肺(气缸)容量变化。
气缸内的活塞与弹簧接触,根据牛顿第三运动定律,气缸内气体对活塞的作用力与弹簧弹力相等,它们之间的关系描述为:
ΔpA=F1=F2=KΔx
(5)
式中,A表示活塞横截面面积,F1表示气缸内气体对活塞的作用力,F2表示弹簧弹力,K表示弹簧弹性系数,Δx表示弹簧形变量,与活塞位移一致。
肺(气缸)内气体体积变化与活塞位移之间的关系为:
ΔV=AΔx
(6)
因此,肺顺应性与活塞横截面面积、弹簧弹性系数的关系为:
(7)
2 呼吸机系统模型气动方案
本文研究的呼吸机采用双管路设计,即吸气管路和呼气管路。患者吸气时,吸气管路中的吸气阀打开,呼气管路中的呼气阀关闭,空气被风机吸入,经软管流向患者肺部;呼气时,呼气管路中的呼气阀打开,患者肺内气体流向呼气管路。呼吸机系统模型气动方案如图5所示。
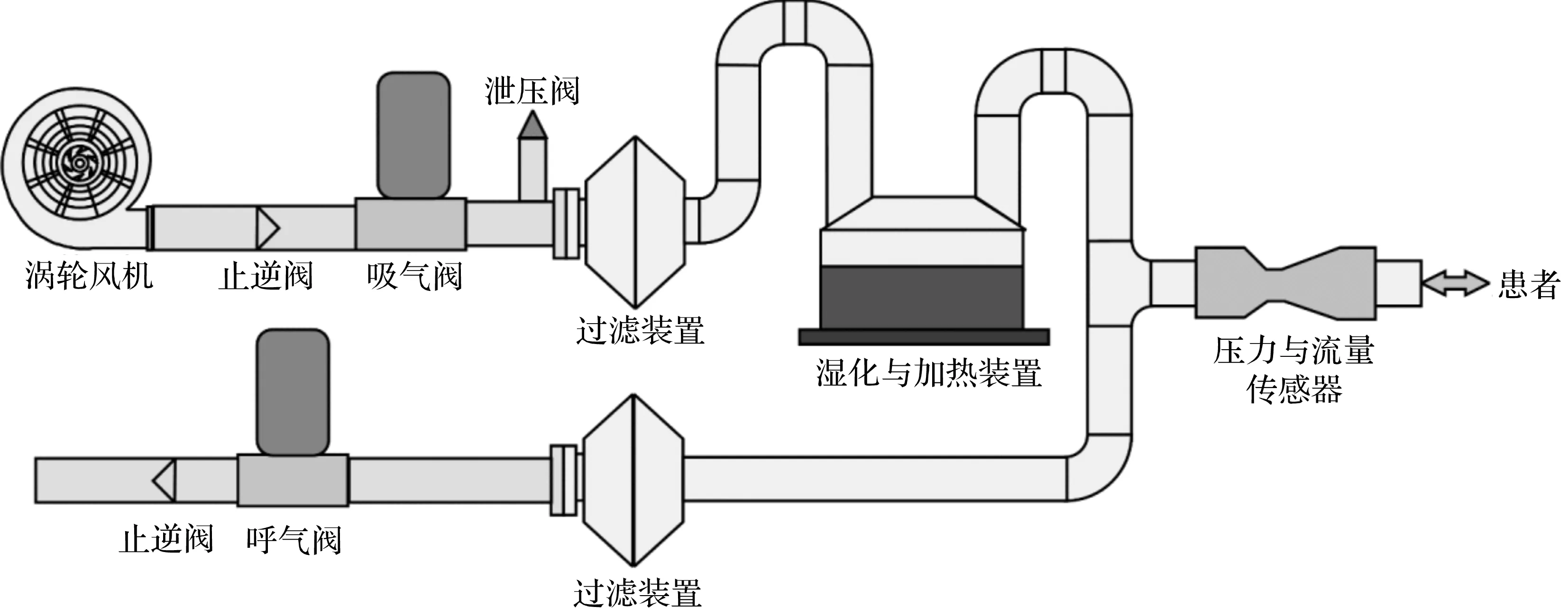
图5 呼吸机系统模型气动方案
吸气阀采用比例阀,阀门开度可精确调整用于控制吸气气流。泄压阀保证气压处于安全范围内,避免过高峰值压力损害患者肺部。当压力达到阀门阈值时,阀门自动打开以阻止压力继续增加。过滤装置用于过滤气体中的污染颗粒。湿化与加热装置用于控制患者吸入气体的湿度和温度。
呼气阀采用比例阀,调节患者呼气流量,对呼气末正压进行控制,防止患者过度呼气导致肺泡塌陷。吸气管路与呼气管路中的止逆阀只允许气体单向流动,起到防止气体倒流的作用。压力传感器和流量传感器安装在靠近患者的位置,便于测量患者气道压力和吸气/呼气流量。根据吸气流量和吸气时间,可以计算出患者的潮气量,即平静呼吸时每次吸入或呼出的气量。
3 仿真实验与分析
参照呼吸机系统模型气动方案,采用多域物理建模工具Simscape,在Simulink平台建立呼吸机系统的仿真模型,如图6所示。呼吸机采用闭环控制,保证了患者呼吸过程中的气体流量或压力具有较高的精度。传感器测得的流量和压力信号是控制器的输入信号。风机电压、吸气阀开度和呼气阀开度这3个信号是控制器的输出信号。控制器负责吸气状态与呼气状态的切换、吸气与呼气过程中气压与流量的控制。通过对控制器控制算法的设计,实现了呼吸机的多种通气模式。
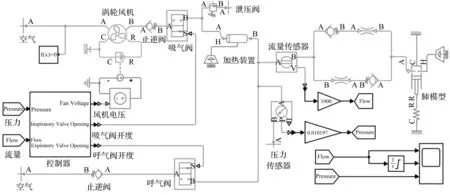
图6 呼吸机系统仿真模型
在本文研究中,通过测试容量控制通气和压力控制通气这2种通气模式对呼吸机系统模型进行验证。容量控制通气模式按照设定的潮气量输送给患者,是危重症患者最常用的方法之一。容量控制通气是对患者吸气量的控制,要求精确控制吸气流量。比较常见的流速波形是方波,吸气过程中的吸气流量保持恒定。在容量控制通气模式下,图6呼吸机系统仿真模型的重要参数设置如表1所示。容量控制通气模式的潮气量取值范围一般为5.6~7.5 mL/kg,本文取值7.0 mL/kg,假定患者质量为68 kg,则患者潮气量约0.480 L。吸气时间为1.3 s,则患者吸气流量为0.37 L/s。

表1 容量控制通气参数设置
呼吸机采取容量控制通气模式时,风机保持在恒定转速,由流量传感器测量患者吸气流量,控制器通过调节吸气阀开度来控制吸气流量,由吸气切换为呼气时,呼气阀被打开,允许患者呼气。呼吸机系统模型采取容量控制通气模式时,经传感器采集并加工处理得到的流量、容量和压力波形如图7所示。

图7 容量控制通气模式下的呼吸机波形
图7(a)中,流量的正负分别表示气体从患者肺部流入与流出。在吸气阶段,流量保持恒定,接近设定吸气流量值0.37 L/s。图7(b)中,容量由流量对时间积分得到,间接反映肺容量的变化。随着吸气或呼气的进行,肺容量随之增大或减小,容量曲线峰值表明患者潮气量接近0.480 L。从图7(c)可以看出,气道压力随着吸气过程的进行有所增长,压力峰值可达26.0 cmH2O。
压力控制通气也是一种比较常见的通气模式,在患者吸气时,气道压力保持在设定水平,输送气体容量依赖于设定吸气压力和肺顺应性。压力控制可以有效防止有害的压力峰值,减少与通气相关的肺损伤。在压力控制通气模式下,图6呼吸机仿真模型的重要参数设置如表2所示。压力控制通气模式的吸气压力范围一般为20.5~31.0 cmH2O,本文取值为21.0 cmH2O。

表2 压力控制通气参数设置
呼吸机采取压力控制通气模式时,吸气阀开度保持在恒定值,由压力传感器测量患者吸气压力,控制器通过调节风机电压来改变风机转速,进而将吸气压力控制在设定值附近。呼吸机系统模型采取压力控制通气模式时,经传感器采集并加工处理得到的流量、容量和压力波形如图8所示。

图8 压力控制通气模式下的呼吸机波形
从图8(a)可以看出,在吸气阶段,流量很快就达到峰值。从图8(b)可以看出,患者在呼吸过程中的潮气量约为0.390 L。从图8(c)可以看出,吸气时气道压力稳定在21.0 cmH2O左右,呼气时气道压力稳定在5.0 cmH2O左右,与设定目标一致。
为了进一步验证基于Simscape的呼吸机系统Simulink模型模拟机械通气的可行性,选取Xlung虚拟仿真平台进行对比实验。Xlung是肺病学家和重症监护专家Marcelo Alcantara Holanda博士设计的机械通气虚拟仿真平台,旨在促进机械通气方面的教学与培训[10]。对比实验采用容量控制通气和压力控制通气2种通气模式,参数配置分别参照表1与表2,Simulink模型与Xlung虚拟仿真平台的呼吸机波形对比如图9所示。
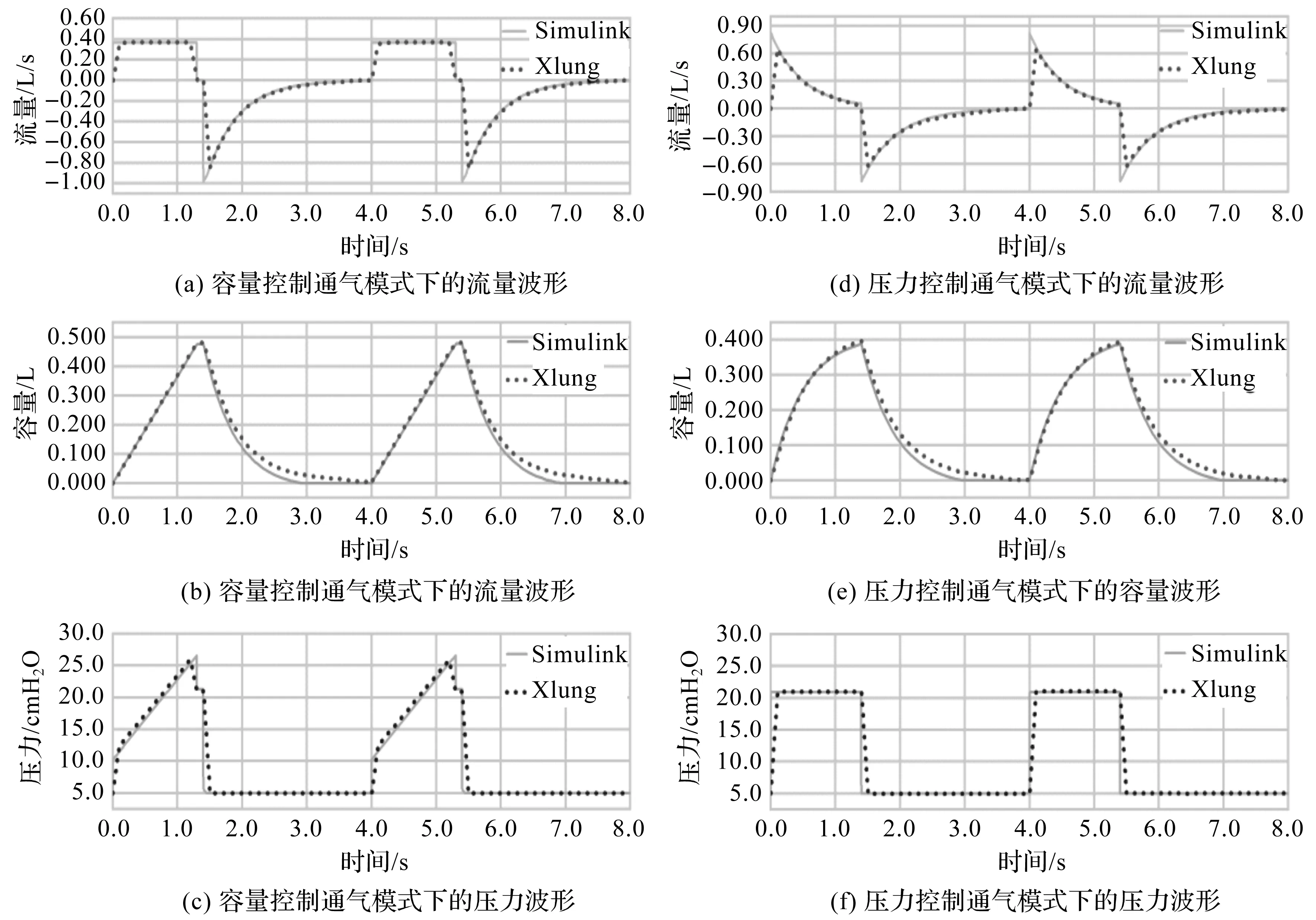
图9 Simulink模型与Xlung的呼吸机波形对比
从图9可以看出,容量控制通气和压力控制通气2种模式下,Simulink模型与Xlung的流量、容量和压力3种波形均表现出良好的一致性。Simulink模型与Xlung波形误差分析如表3所示。

表3 Simulink模型与Xlung波形误差分析
从表3可以看出,Simulink模型在容量控制通气和压力控制通气2种模式下的流量、容量和压力波形与Xlung的波形误差较小,说明本文提出的Simulink模型同样适用于机械通气的仿真。
综上分析可知,基于Simscape元件库建立的呼吸机系统Simulink仿真模型可以有效模拟容量控制通气和压力控制通气2种模式,对推动通气模式的研究有一定的实际意义。
4 结束语
本文采用Simulink仿真平台和Simscape元件库对呼吸机系统进行建模与仿真,为呼吸机与人体肺部的相互作用提供计算模型,可用于呼吸机不同控制方案的测试。后续将进一步优化模型,研究呼吸机与自主呼吸患者的同步问题,增加氧气浓度的控制以满足患者对不同氧气浓度的需求。
