基于人工智能技术的低空飞行器管控关键技术研究
2023-06-25褚鹏王军刘树光李泽朱锐
褚鹏 王军 刘树光 李泽 朱锐
摘要: 以人工智能技術在低空飞行领域的应用为切入点, 分析了人工智能技术驱动下低空飞行器向平台无人化、 控制智能化、 任务多元化发展带来管控对象多元复杂、 管控难度不断提升、 管控时空深度拓展的现实挑战。 提出了以预实践决策提升飞行审批效率、 以自主式决策实时监控飞行状态、 以数据驱动式决策精准处置违规行为的主要决策方法和发展途径, 剖析了人工智能技术、 软杀伤技术、 硬毁伤技术在管控建设及应急处置中的运用要点和优缺点。
关键词: 人工智能; 软杀伤技术; 硬毁伤技术; 空域安全; 低空; 飞行器中图分类号: TJ760; V271
文献标识码: A文章编号: 1673-5048(2023)02-0120-05
DOI: 10.12132/ISSN.1673-5048.2022.0222
0引言
人工智能因其具有“类脑”功能, 在某些方面可以超越人类极限, 人工智能、 大数据、 云计算等智能科技发展将直接推动智能机器、 群体智能、 人机融合智能等领域深度开发和应用, 大幅提升人类改造世界的能力。 近年来, 在低空飞行领域, 人工智能技术快速发展和应用, 以无人机为代表的低空飞行器已广泛应用于民航运输、 执法监控、 影视拍摄等方面[1], 国外对空域管制运行的风险及空中交通管理综合运用业务数据、 管理规则、 控制策略等进行了深入研究探索[2-3], 低空空域的开放使用和低空飞行器的管控是在确保空域安全的前提下深入推进低空飞行器发展和运用。 然而长期以来, 由于管控手段和发展理念滞后, 我国对低空空域资源的开发利用力度很小, 管控方法单一。 低空空域管控呈现空域划分不够合理、 管理体制不够科学、 运行机制不够顺畅、 安全责任不够明晰、 服务保障不够完善等问题[4]。 低空飞行发展与高效管控及应急处置建设之间矛盾凸显, 为此, 探索低空飞行管控的决策方法、 发展途径以及关键技术运用, 就成为我国低空飞行器管控新的研究方向。
1人工智能技术驱动低空飞行器管控面临的挑战低空飞行器主要是指轻型和超轻型飞机、 航空航天模型、 滑翔机、 旋翼式飞行器、 无人机等低、 慢、 小飞行器。 基于模型和算法的人工智能(AI)系统是人工智能技术在低空飞行器发展应用的重要方面, AI系统和大数据信息系统将发挥倍增器的作用, 实现“设计有人、 控制无人”的发展目标, 低空飞行器的无人化、 智能化、 多元化趋势明显, 应用效益显著[5], 其对低空飞行器管控工作也带来了严峻挑战。
1.1低空飞行平台无人化, 管控对象多元复杂
人工智能技术在低空飞行器中的应用不断深入, 技术成熟度也在不断提升, 人工智能视觉识别技术、 智能决策技术等在低空飞行器中应用的典型趋势就是低空飞行平台趋于无人化, 人逐步从传统的飞行系统中脱离, 从前台走向幕后, 使人的身体机能脱离对飞行平台的限制, 使低空飞行平台的设计更灵活, 功能更强大。 在低空飞行平台无人化的趋势下, 低空飞行器的种类、 功能发展日新月异, 对低空自主飞行的客观需求增加, 低空飞行器管控的对象也呈现多元化、 复杂化。
1.2低空飞行控制智能化, 管控难度不断提升
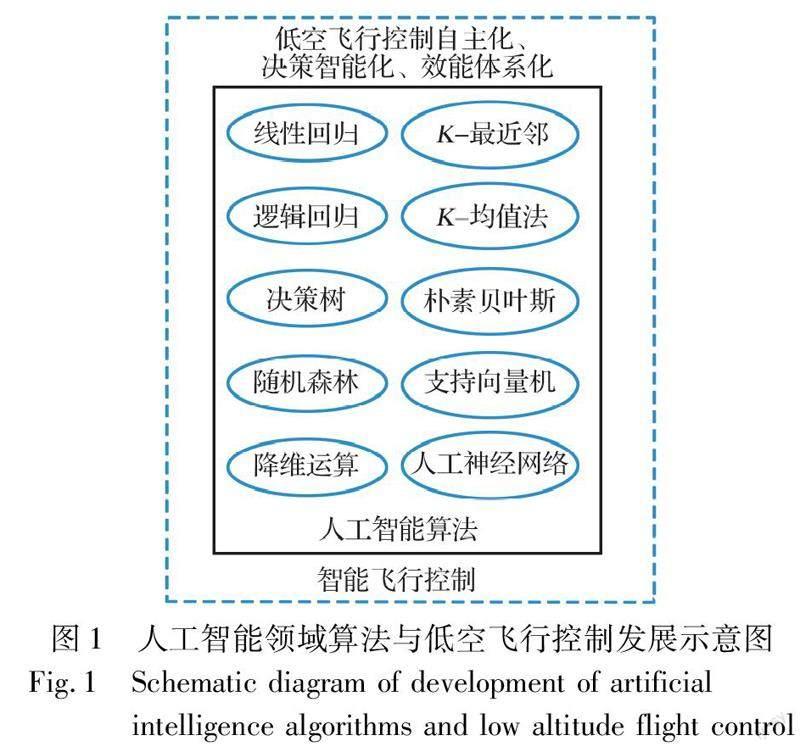
人工智能领域的线性回归、 逻辑回归、 决策树、 随机森林、 降维运算、 K-最近邻、 K-均值法、 朴素贝叶斯、 支持向量机、 人工神经网络这10大算法不断促进低空飞行向控制自主化、 决策智能化、 效能体系化方向发展, 如图1所示。 这些人工智能算法的应用原理虽然简单, 但却很实用, 例如, 线性回归是假设输出变量是若干输入变量的线性组合, 根据这一关系可以求解线性组合中的最优系数; K-最近邻是一种监督学习机器算法, 可用于解决机器学习算法中的回归和分类任务; 人工神经网络是深度学习的核心, 其非常适合处理大型和高度复杂的机器学习任务。 随着这些智能算法在智能辅助决策技术、 数字参谋、 云端大脑的建设运用, 低空飞行器的自主控制能力凸显, 智能化使其逐步摆脱外部环境的限制, 对其进行精准管控的难度增加, 因此, 应运用智能控制技术, 创新智能算法, 紧密对接低空飞行器控制智能化发展, 在平台无人化的基础上实现低空飞行器的自主控制和低空空域飞行管控平台的指令控制相结合, 突出智能化控制的运用, 提升低空飞行器的飞行效率和低空空域的运行效率。
1.3低空飞行任务多元化, 管控时空深度拓展
低空飞行器在平台无人化、 控制智能化发展的同时, 其类型不断增加、 功能不断扩展, 执行的任务也更加多元。 目前, 低空飞行器已经在低空经济物流、 低空应急救援、 低空航拍监测、 科研教育活动、 低空侦察打击等方面快速发展和应用, 并取得良好的效果和发展前景。 例如, 低空飞行器在低空娱乐观光、 物流运输、 载客运输、 影视拍摄等方面促进低空经济发展; 在地震、 火灾、 水患救援、 应急通信保障、 电力应急抢修等方面执行应急救援任务; 在生态环境监测、 交通道路巡查、 灾害预警等方面执行低空航拍监测任务; 在飞行器研发、 低空飞行驾驶培训等方面支撑开展科研教育工作; 在巡逻侦察、 犯罪追踪、 对抗打击等方面遂行低空侦察打击任务。 低空飞行器任务多元化必将带来低空飞行时空的拓展, 对空管的效率、 精度提出了更高要求, 需要借助网络化、 信息化、 智能化技术手段, 有力支撑低空飞行器管控能力建设。
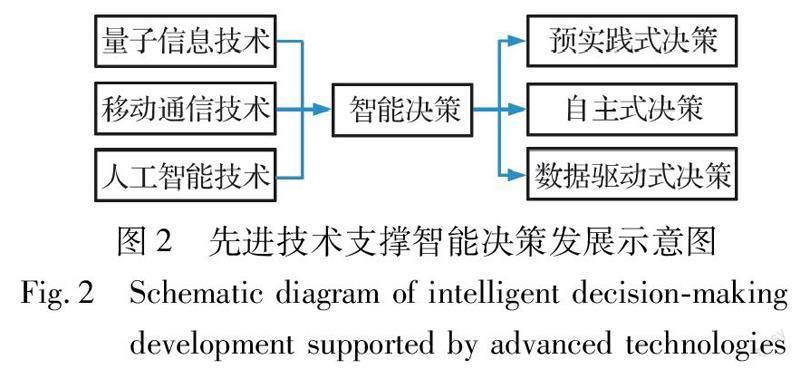
2低空飞行器管控的主要决策方法和发展途径我国实行的是“统一管制, 分别指挥”的航空管制体系, 主要空域均由空军组织实施管理。 通常, 航路内的飞行活动由民航提供管制指挥, 航路外的飞行活动由军航负责管制指挥[6]。 低空飞行器管控应注重军地联合、 理顺体制机制、 立足技术支撑、 丰富管控功能、 形成管控合力。 而高效管控的核心在于决策方法的合理选取和技术的有力支撑, 重点探索决策方法、 寻求发展路径。 综合研究认为, 以量子信息、 移动通信、 人工智能等先进技术加强低空飞行器智能决策能力建设; 以预实践式决策优化提升飞行审批效率; 以自主式决策自主监控低空飞行器状态, 及时告警、 精准引导处置; 以数据驱动式决策快速从大数据中挖掘有用信息, 供管控人员科学决策、 高效处置安全威胁。 先进技术支撑智能决策发展示意图如图2所示[7]。
2.1以预实践式决策提升飞行审批效率
为确保低空空域安全, 必须加强对低空飞行器用空需求的审批管理力度, 实现低空飞行管控信息与用户飞行需求信息的高效、 准确交互, 所有低空飞行器飞行计划必须经过审批、 报备后, 才可以升空飞行。 作为管控方, 既要规范审批程序, 也要细化审批内容, 提升审批效率, 使低空飞行活动有章可循, 有规可依, 提升低空飞行服务保障能力。 预实践式决策重在发挥人的主观能动性优势, 加强对低空飞行管控工作的前期谋划, 借助模拟仿真技术手段, 发现问题、 补齐短板, 提高飞行审批决策效率, 有效降低决策风险。
2.1.1优化审批程序, 区分空域管理
低空飞行器飞行方案审批程序的制定应在军地双方进行低空空域管制划分的基础上进行, 以低空空域安全为底线, 尽量简化审批程序。 例如, 低空飞行器在划定的低空“报告空域、 监视空域”内飞行, 可实行飞行计划备案管理, 通过简化飞行审批程序, 缩短飞行准备时间, 提升飞行效率, 空域管控部门为低空飞行活动提供飞行计划、 航空情报、 航空气象、 飞行情报、 告警和协助救援等服务; 在低空“管制空域”中实行飞行计划审批, 用户必须按要求提交审批材料, 获批后才可按飞行计划开展低空飞行活动, 并接受管制服务。
2.1.2规范审批内容, 及时精准发布
在区分空域、 简化程序的基础上, 低空飞行器军地联合管控部门应在自己责权范围内, 规范审批内容, 使组织低空飞行活动的单位和人员知悉什么事项需要报批、 需要准备什么材料, 利用互联网网站、 微信公众号、 抖音等媒体平台及时、 精准发布相关管控制度规定, 并及时收集用户反馈意见, 达到管控部门和用户双向沟通顺畅, 管理要求理解一致的目的。 同时, 应尽量减少审批材料准备的复杂度, 达到该审批的内容不缺失, 多余的材料不用准备的目标。 根据低空空域飞行审批要求, 提交的材料一般包括:飞行器类型、 飞行时间区间、 飞行空域范围、 飞行航线、 驾驶人员资质等。
2.1.3模拟决策分析, 优化完善方案
低空飞行用空需求量大, 申请飞行方案呈现数量多、 种类杂、 时效性强等特点, 为达到对低空飞行活动的高效管控, 提升飞行方案的审批效率是关键因素。 如果審批效率达不到用户的需求, 就会引发用户铤而走险, 实施“黑飞”等行为, 造成重大飞行隐患。 为克服人类身体机能和脑力疲劳的限制, 应充分利用大数据技术提供基础数据支撑, 为决策预案收集设计提供案例库支撑, 为智能算法设计提供自主解析方法支撑, 设计低空飞行管控决策模拟系统, 并对不同时空环境、 不同类型飞行器、 不同飞行任务牵引下的飞行申请方案进行仿真、 检验、 分析、 优化, 对决策方案进行修正和完善, 提升决策方案的可行性和可靠性, 提高飞行计划的审批效率。
2.2以自主式决策实时监控飞行状态
低空飞行器虽然飞行的高度低, 但由于其机动性强, 发生事故的可控性差, 造成的危害性较大, 因此, 低空飞行器军地联合管控应对飞行器起飞前到安全降落的全过程进行监管, 需要实时掌控飞行器运行状态, 及时发现问题隐患。 采用自主式决策可基于飞行大数据平台, 采用智能算法实时获取和分析飞行数据, 一旦出现违规飞行症候和行为, 可通过智能算法支持, 与拟定的处置预案进行对比分析, 自主决策并采取相应处置方案。
2.2.1健全监控手段, 实时获取数据
在低空空域开放的同时, 应加强低空空域的监控手段建设, 一方面, 运用数字微波通信、 卫星通信、 移动通信等技术加强基础通信网络建设, 提供信息通信基础保障; 另一方面, 要求所有低空飞行器申请飞行前必须接入低空飞行管控网络, 并实时上报飞行器状态数据; 再次, 建立低空空域管控人员与低空飞行器操作人员之间的实时信息交互, 便于信息传输和共享。
2.2.2掌控审批内容, 化解冲突矛盾
军地联合管控力量在管控职责分工的基础上, 根据己方管控责任细化管控任务, 及时掌控低空飞行器飞行计划审批情况及具体用空需求, 根据低空飞行空域容量和正在执行的飞行计划, 运用自动化管控系统对将要执行的飞行计划方案进行比对、 分析、 审核, 对于存在的问题及时协调处理, 避免用空冲突, 使低空空域管控方和低空飞行器用户熟知飞行计划的内容, 这是低空飞行活动安全有序的基本前提。 如果飞行计划冲突无法解决, 应及时取消相应的飞行计划并告知计划的组织实施者。
2.2.3建立监测台站, 实时监控状态
只有实时获取低空飞行器的飞行状态, 才能对其进行有效的管控。 因此, 军地双方应加强监控手段的建设, 注重信息的联通共享, 在低空空域范围内建立监测点, 安装监测设备, 实时获取低空空域内低空飞行器的飞行状态, 为低空飞行活动提供有效的计划引导、 航空情报、 气象、 告警和救援等服务, 使低空飞行活动始终在管控系统的自主监控之下运行。 一旦发现违规行为或症候, 系统将自动发出告警, 并精准提供详细的信息数据供指挥人员判断决策。
2.3以数据驱动式决策精准处置违规行为
低空飞行军地联合管控的主要任务是对低空飞行器飞行活动进行实时监控, 适时引导, 对违反规定的飞行器进行告警, 对违规行为及危害进行预判, 科学决策处置方案, 并针对性采取制止行动。 采用数据驱动式决策可基于大数据信息处理软件[8], 依据设定的规则和推理程序对获取的海量低空信息数据进行数据挖掘和综合分析, 提取并分析有价值的信息, 形成数据规律供管控人员决策参考。 管控人员可结合自己的经验, 借助数据分析进行判断决策, 快速高效处置违规行为。
2.3.1分析飞行数据, 精准纠偏校正
由于低空飞行器飞行性能不足, 或飞行器操控人员技术能力不过关、 操控失误等原因, 通常会造成在低空飞行的飞行器未按照规定的飞行高度、 预定航线飞行, 扰乱其他飞行器飞行安全。 因此, 对低空飞行器的飞行数据进行实时分析, 监控低空飞行器系统状态和飞行计划执行情况; 同时, 基于多源数据的实时比对分析, 对违规飞行的行为和安全隐患及时进行分析判断, 精准指出违规行为, 督促、 指导低空飞行器操控人员采取纠错措施, 快速恢复正常的飞行活动。
2.3.2高效决策处置, 降低风险危害
对于常规违反低空飞行规定的行为, 通常采取及时准确的管控引导即可使飞行器恢复正常飞行, 但由于低空飞行器故障、 操作失控, 或操纵人员蓄意破坏活动等原因, 低空飞行器危险飞行会扰乱低空飞行航线活动, 对其他在空飞行器安全造成威胁, 对地面目标造成潜在危害。 因此, 军地联合管控部门应针对具体情况, 运用关联分析法、 蒙特卡洛分析法等进行低空飞行数据分析和风险评估, 基于智能化的低空飞行管控系统自主生成决策方案, 供管控指挥人员决策参考, 或基于特定授权, 由管控系统自主决策采取相应方案, 及时制定应对措施, 将危害将至最小。
2.3.3精准采取行动, 减少附带损伤
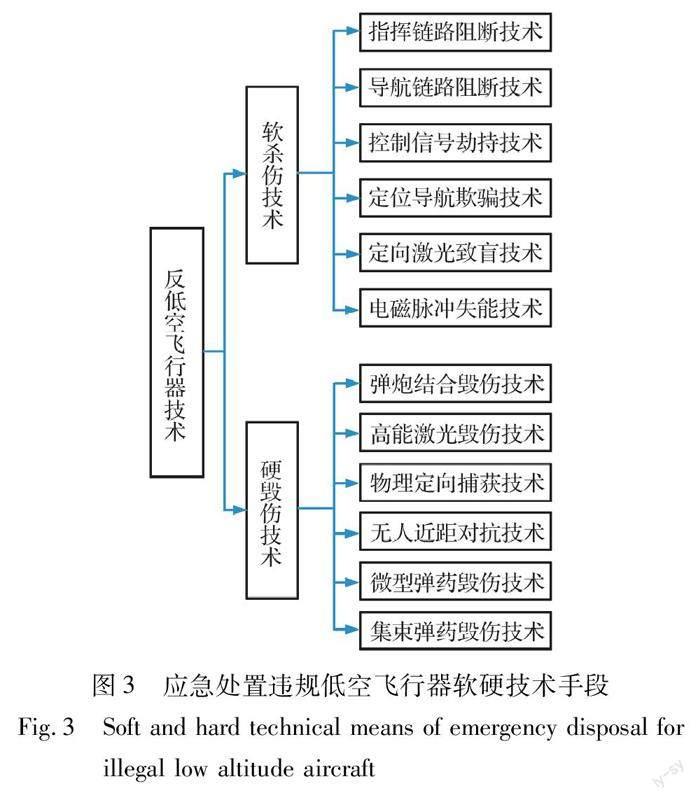
对于不听从管控指令、 危害低空飞行和地面目标安全的飞行器, 应加强相关飞行信息数据的挖掘与综合分析, 预判采取具体处置技术手段的附带损失, 通过指挥员的经验和数据智能分析支持系统快速科学决策, 综合运用干扰阻断、 链路劫持、 信号劫持、 导航欺骗、 激光致盲、 脉冲失能等软杀伤技术手段和弹炮结合毁伤、 高能激光、 定向捕获、 近距对抗、 微型弹药、 集束弹药等硬毁伤技术手段(如图3所示[9]), 精準制止违规飞行行为, 迫使其降落至安全区域, 或使其损毁, 避免或最大限度降低对在空飞行器或地面目标造成的伤害。
3低空飞行器管控关键技术运用
低空飞行器的发展伴随着技术的创新应用, 对其实施高效管控应依托关键技术运用, 一方面以人工智能技术运用提升对低空飞行活动的管控能力, 另一方面综合运用软杀伤和硬毁伤技术, 快速、 精准制止低空危害活动, 有效降低威胁和损失。
3.1以人工智能技术支撑一体化管控能力建设
由于低空飞行器体型小、 飞行高度低、 速度慢, 实时准确掌控空域内低空飞行器数量、 位置等信息是对其实施有效管控的基本前提, 应综合运用光电探测、 雷达探测、 声波探测、 无线电频谱探测等技术, 全方位、 多角度获取低空目标飞行数据; 运用人工智能视觉识别技术, 对低空目标实施精准高效的自主识别和分类; 运用深度智能分析技术快速处理信息数据, 对开源数据中的威胁信息进行精准识别, 加快情报数据和低空飞行态势分析, 为管控决策提供情报依据; 运用智能化决策技术, 基于决策方案库、 决策规则和算法实施高效的管控决策, 最终形成对低空飞行器的自主探测、 自主分析、 自主识别、 自主决策、 自主指挥的一体化管控能力。
3.2以软杀伤技术有效降低附带损伤
低空飞行器无论其是否携带攻击弹药, 其本身就可能随时成为一种攻击武器, 对空中其他目标和地面目标造成威胁。 为有效降低附带损伤, 应运用指挥链路阻断技术, 对遥控信息频段进行阻断干扰, 切断操控端与飞行平台之间的无线电联系, 使其失去控制; 运用控制信号劫持技术, 夺取低空飞行器的控制权, 操控其飞行至安全区域; 运用导航链路阻断技术对低空飞行器的卫星定位信号进行干扰, 使其无法精确定位, 进而使控制系统无法正常工作, 丧失遂行任务的能力, 迫使其快速降落; 运用定位导航欺骗技术误导低空飞行器飞行, 引导其飞离重点空域; 运用定向激光致盲技术使低空飞行器失去飞行方向, 无法准确对目标实施威胁; 运用电磁脉冲失能技术损伤目标元器件, 使低空飞行器失去某方面的功能, 例如, 破坏低空飞行器控制系统元器件使其失去控制能力。 以上软杀伤技术中, 运用导航链路阻断技术会对区域内其他低空飞行器的定位设备造成影响, 对于自主飞行的低空飞行器, 运用指挥链路阻断技术和控制信号劫持技术对其他飞行活动没有制约作用[10]。
3.3以硬毁伤技术快速消除风险威胁
在软杀伤技术手段无法阻止低空飞行器飞行行为时, 为快速消除风险威胁, 可综合运用硬毁伤技术手段对目标进行精准毁伤, 避免造成难以挽回的损失。 运用弹炮结合毁伤技术, 可在一定高度和距离范围内对低空飞行器实施毁伤, 但易受弹炮射程限制, 而且发射导弹毁伤目标的成本也较大, 效费比不高; 运用高能激光毁伤技术毁伤低空飞行器, 精准度高, 但激光毁伤的机理是需要持续照射低空飞行器表面, 通过能量聚集毁伤目标, 而且激光器的设备较大, 机动性较弱; 运用物理定向捕获技术费用低, 附带损伤小, 但无论是机载还是车载发射网弹, 对发射的距离、 时机和角度要求都很高; 运用无人近距对抗技术可抵近目标实施近距精准对抗, 使用无人飞行器配备的对抗装备对低空飞行器实施定向干扰、 精准毁伤, 特殊情况下可以直接撞击低空飞行器, 以自杀式攻击毁伤目标; 运用微型弹药毁伤技术成本小、 效费比高, 但其攻击距离有限; 运用集束弹药毁伤技术可增大对低空飞行器的杀伤概率, 对集群目标具有很好的杀伤效果, 但其对弹药储备数量要求高, 持续杀伤能力不强[11]。
4结论
人工智能技术不仅促进了低空飞行器的快速发展和低空空域的有序开放, 而且对低空飞行管控能力的建设也发挥了核心的技术支持作用。 低空飞行器管控应针对低空飞行器智能化发展带来的现实挑战, 依托低空空域分类划设、 管控机构设置、 职能划分等系统架构, 运用量子信息、 移动通信、 智能分析等技术支撑, 实施低空飞行预实践式决策、 自主式决策、 数据驱动式决策, 确保低空飞行管控决策的精确性、 高效性; 同时, 应注重人工智能技术支持一体化管控能力建设, 加强低空飞行软杀伤技术和硬毁伤技术创新发展和应用, 支持快速消除危害和风险能力建设, 在低空空域内搭建智能、 安全、 高效的低空飞行管控与应急处置体系, 实现低空安全与低空经济发展的融合双赢。
参考文献:
[1] Kamnik R, Nekrep P M, Topolek D. Using the Scanners and Drone for Comparison of Point Cloud Accuracy at Traffic Accident Analysis[J]. Accident Analysis and Prevention, 2020, 135: 105391.
[2] Matsuoka T, Amai O. Evaluating Human Error Data for Hazards in Air-Traffic Control and Deriving a Quantitative Safety Index[J]. International Journal of Aviation Management, 2019, 4(3): 199-223.
[3] Kontogiannis T, Malakis S, McDonald N. Integrating Operational and Risk Information with System Risk Models in Air Traffic Control[J]. Cognition, Technology & Work, 2017, 19(2/3): 345-361.
[4] 刘钢. 扩大低空空域开放 突破通用航空业增长瓶颈 [EB/OL]. (2016-08-24)[2022-01-25]. https:∥www. sohu. com/a/111852615_472861. Liu Gang. Expand the Opening of Low Altitude Airspace and Break Through the Growth Bottleneck of General Aviation Industry [EB/OL].(2016-08-24) [2022-01-25]. https:∥www. sohu. com/a/111852615_ 472861.(in Chinese)
[5] 吳明曦, 朱丹. 人工智能对军事领域的影响[J]. 军民两用技术与产品, 2020(11): 9-11.Wu Mingxi, Zhu Dan. The Impact of Artificial Intelligence on the Military Field[J]. Dual Use Technologies & Products, 2020(11): 9-11.(in Chinese)
[6] 姜伟波. 浅析我国低空开放对空域管制的影响和对策[J]. 科技视界, 2019(17): 101-103.Jiang Weibo. Analysis of the Impact of Chinas Low Altitude Opening on Airspace Control and Countermeasures[J]. Science & Technology Vision, 2019(17): 101-103.(in Chinese)
[7] 王鹏. 把握智能化战争特点规律 推动智能化训练创新发展[J]. 国防科技, 2019, 40(1): 1-4Wang Peng. Grasp the Characteristics and Laws of Intelligent Wars, Promoting the Innovative Development of Intelligent Training[J]. National Defense Technology, 2019, 40(1): 1-4.(in Chinese)
[8] 黄亭飞, 程光权, 黄魁华, 等. 基于DQN的多类型拦截装备复合式反无人机任务分配方法[J]. 控制与决策, 2022, 37(1): 142-150.Huang Tingfei, Cheng Guangquan, Huang Kuihua, et al. Task Assignment Method of Compound Anti-Drone Based on DQN for Multi Type Interception Equipment[J]. Control and Decision, 2022, 37(1): 142-150.(in Chinese)
[9] 闫家鼎, 谢海斌, 庄东晔. 无人机集群对要地防空的威胁及反制对策研究[J]. 飞航导弹, 2021(7): 56-61.Yan Jiading, Xie Haibin, Zhuang Dongye. Threat of UAV Cluster to the Air Defense of Important Areas and Research on Countermeasures[J]. Aerodynamic Missile Journal, 2021(7): 56-61.(in Chinese)
[10] 刘宏. 无人机探测反制技术及应用研究[J]. 科技创新与应用, 2021(25): 135-137.Liu Hong. Research on Detection and Counteraction Technology of UAV and Its Application[J]. Technology Innovation and Application, 2021(25): 135-137.(in Chinese)
[11] 王正刚, 康青, 荀怡佳, 等. 低慢小无人机对军事区域的安全威胁及其应对方法[J]. 国防科技, 2021(3): 65-71.Wang Zhenggang, Kang Qing, Xun Yijia, et al. Security Threats Posed by LSS Unmanned Aerial Vehicles to Military Areas and Possible Countermeasures[J]. National Defense Technology, 2021(3): 65-71.(in Chinese)
Research on Key Technologies of Low Altitude Vehicle Management
and Control Based on Artificial Intelligence Technology
Chu Peng Wang JunLiu Shuguang Li Ze Zhu Rui
(1. School of Electronic Information, Xijing University, Xian 710123, China;
2. School of Equipment Management and UAV Engineering, Air Force Engineering University, Xian 710051, China)
Abstract: Taking the application of artificial intelligence technology in the field of low altitude flight as an breakthrough point, this paper analyzes the challenges of unmanned platform, intelligent control and multi-task of low-altitude aircraft driven by artificial intelligence (AI) technology, which bring about multi-complex control objects, increasing control difficulty and expanding space-time depth. It puts forward the main decision-making methods and development approaches of improving the efficiency of flight examination and approval by pre-practice decision-making, real-time monitoring of flight status by autonomous decision-making, and accurate handling of violations by data-driven decision-making. This paper analyzes the main points, advantages and disadvantages of the application of artificial intelligence technology, soft killing technology and hard damage technology in the construction of management control and emergency treatment.
Key words: artificial intelligence; soft killing technology; hard damage technology; airspace security; low altitude; vehicle